
GPR Clutter Reflection Noise-Filtering through Singular Value Decomposition in the Bidimensional Spectral Domain

 , , and
, , and
Abstract
:
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
1. Introduction
1.1. Ground-Penetrating Radar Surveys in Archaeologic Environment
1.2. The Noise Problem in the GPR Datasets
1.3. GPR Filtering Approaches
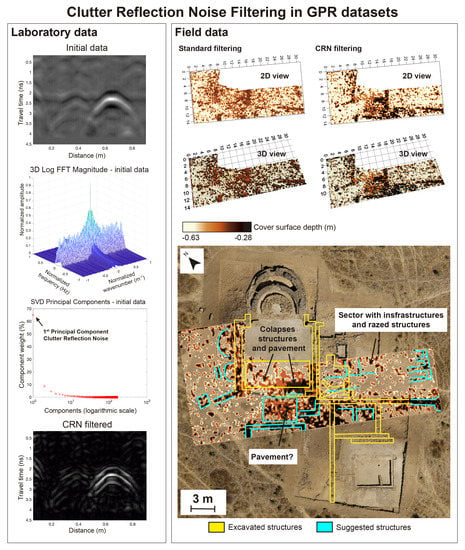
1.4. Proposed CRN Filter
2. Implementation of the CRN Filter in GPR Datasets
2.1. General Overview
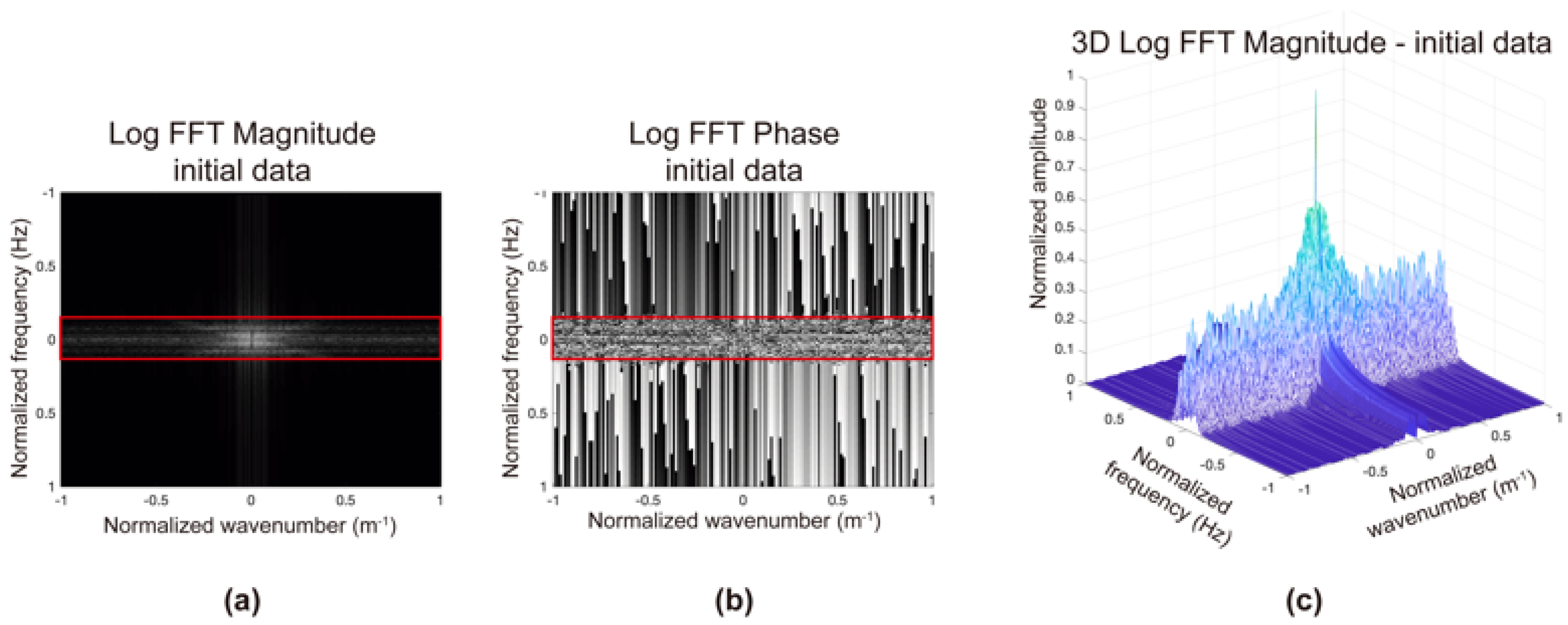
2.2. Bidimensional Spectral Analysis of a GPR Dataset
2.3. Parametrization and Application of the Filter Matrix
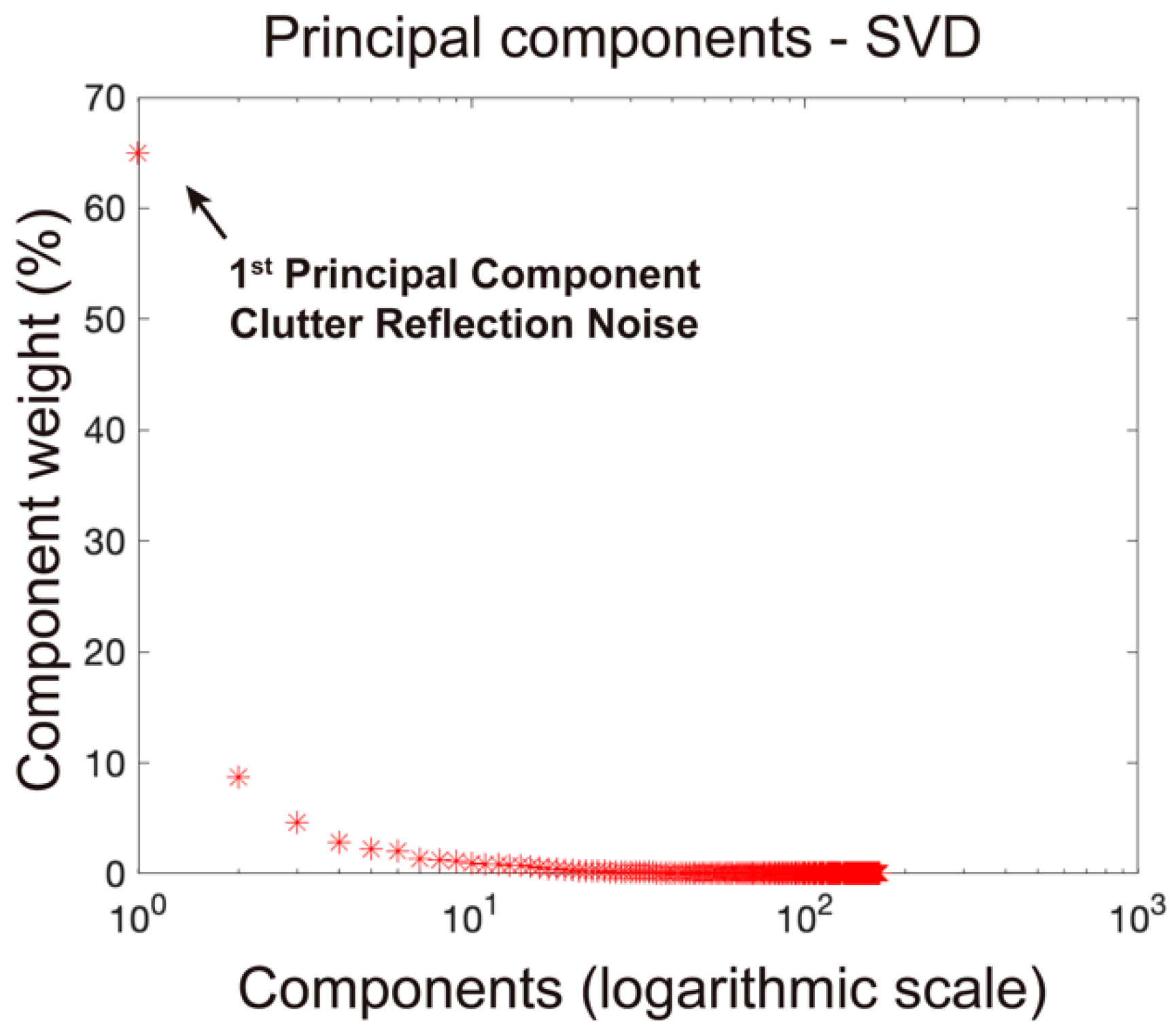
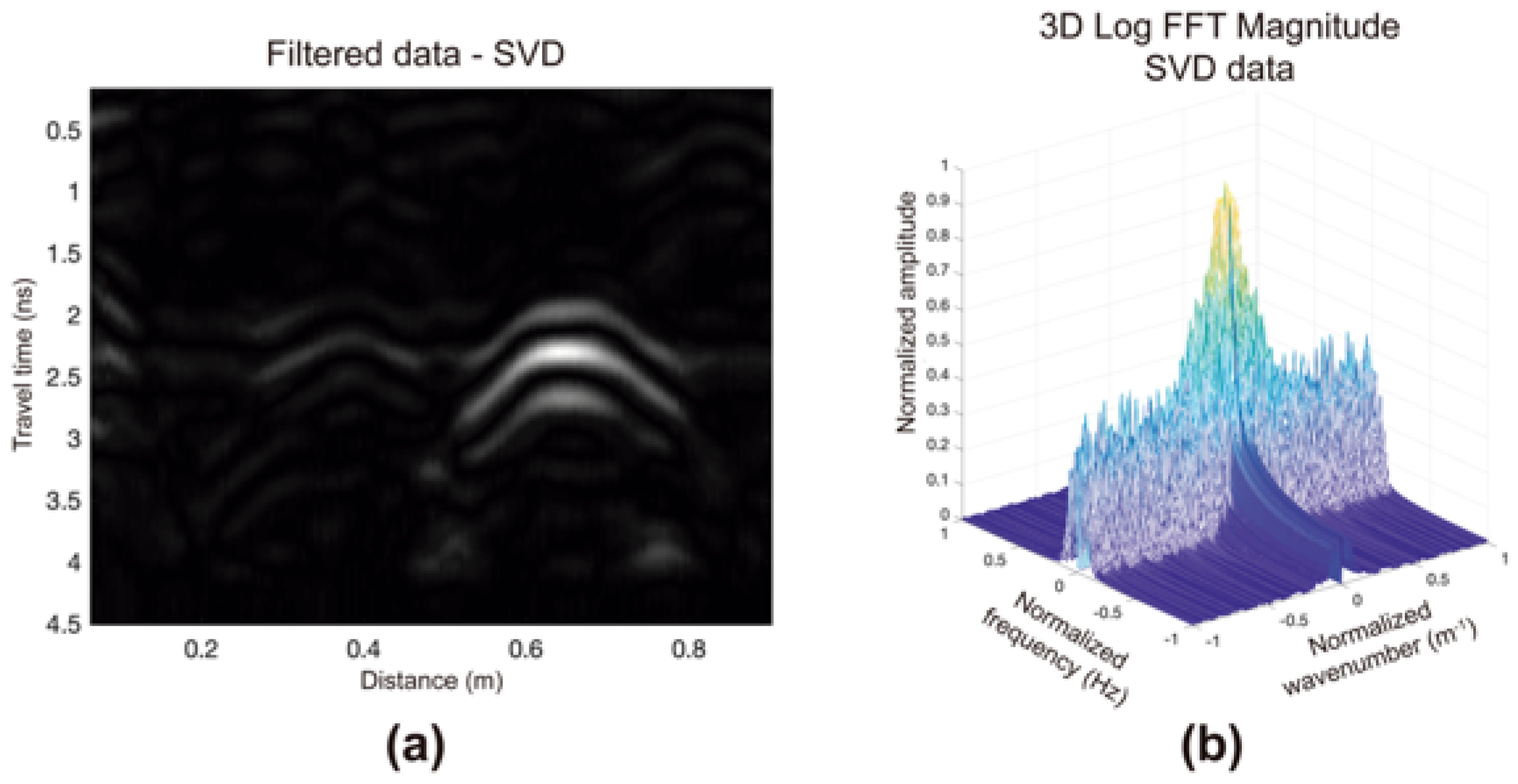
2.4. Using Singular Value Decomposition (SVD) in the CRN Filtering
3. Application of the CRN Filter to a 3D-GPR Dataset (Uncontrolled Environment)
4. Discussion of the Results
5. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Vickers, R.S.; Dolphin, L.T. A Communication on archaeological radar experiment at Chaco Canyon, New Mexico. MASCA Newsl. 1975, 11, 6–8. [Google Scholar]
- Conyers, L.B.; Goodman, D. Ground-Penetrating Radar: An Introduction for Archaeologists; AltaMira Press: Walnut Creek, CA, USA, 1997. [Google Scholar]
- Jol, H.M. (Ed.) Ground Penetrating Radar Theory and Applications; Elsevier Science: Amsterdam, The Netherlands, 2009. [Google Scholar]
- Bi, W.; Zhao, Y.; An, C.; Hu, S. Clutter Elimination and Random-Noise Denoising of GPR Signals Using an SVD Method Based on the Hankel Matrix in the Local Frequency Domain. Sensors 2018, 18, 3422. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Chen, G.; Fu, L.; Chen, K.; Boateng, C.; Ge, S. Adaptative Ground Clutter Reduction in Ground-Penetrating Radar Data Based on Principal Component Analysis. IEEE Trans. Geosci. Remote Sens. 2019, 57, 3271–3282. [Google Scholar] [CrossRef]
- Nobes, D. Geophysical surveys of burial sites: A case study of the Oaro urupa. Geophysics 1999, 64, 357–367. [Google Scholar] [CrossRef]
- Hamran, S.; Gjessing, D.; Hjelmstad, J.; Asrholt, E. Ground penetrating synthetic pulse radar: Dynamic range and modes of operation. J. Appl. Geophys. 1995, 33, 7–14. [Google Scholar] [CrossRef]
- Solimene, R.; D’Alterio, A. Entropy-based clutter rejection for intrawall diagnostics. Int. J. Geophys. 2012, 2012, 41804. [Google Scholar] [CrossRef] [Green Version]
- Kempen, K.; Sahli, H. Signal processing techniques for clutter parameters estimation and clutter removal in GPR data for landmine detection. In Proceedings of the 11th IEEE Signal Processing Workshop on Statistical Signal Processing, Singapore, Singapore, 6–8 August 2001; pp. 158–161. [Google Scholar]
- Haysashi, N.; Sato, M. F-K filter designs to supress direct waves for Bistatic ground penetrating radar. IEEE Trans. Geosci. Remote Sens. 2010, 48, 1433–1444. [Google Scholar] [CrossRef]
- Mohideen, S.; Perumal, S.; Sathik, M. Image de-noising using discrete wavelet transform. Int. J. Comput. Sci. Netw. Secur. 2008, 8, 213–216. [Google Scholar]
- Jeng, Y.; Lin, C.; Li, Y.; Chen, C.; Huang, H. Application of multiresolution analysis in removing ground-penetrating radar noise. In Proceedings of the CSPG CSEG CWLS Convention, Calgary, AB, Canada, 4–8 May 2009; pp. 416–419. [Google Scholar]
- Shi, X.; Yang, Q. Supperssion the direct wave noise in GPR data via the 2-D physical wavelet frame. In Proceedings of the International Conference on Transportation, Mechanical, and Electrical Engineering (TMEE), Changchun, China, 16–18 December 2011; pp. 1161–1164. [Google Scholar]
- Wang, W.; Zhao, B.; Liu, X.; Fang, G. Total-variation improved split Bregman method for ground penetrating radar image restoration. J. Appl. Geophys. 2013, 99, 146–153. [Google Scholar] [CrossRef]
- El-Shenawee, M.; Pappaport, C. Monte Carlo simularions for clutter statistics in minefields: AP-mine-like-target buried near a dielectric object beneath 2-D random rough ground surfaces. IEEE Trans. Geosci. Remote Sens. 2002, 40, 1416–1426. [Google Scholar] [CrossRef]
- Soldovieri, F.; Lopera, O.; Lambot, S. Combination of advanced inversion techniques for an accurate target localization via GPR for demining applications. IEEE Trans. Geosci. Remote Sens. 2011, 49, 451–461. [Google Scholar] [CrossRef]
- Lo Monte, F.; Soldovieri, D.; Erricolo, M.; Wicks, M. Radio frequency tomography for below ground imaging and surveillance of targets under cover. In Effective Surveillance for Homeland Security: Balancing Technology and Social Issues; Taylor & Francis/CRC Press: Boca Raton, FL, USA, 2013. [Google Scholar]
- Freire, S.; Ulrych, T. Application of singular value decomposition to vertical seismic profiling. Geophysics 1988, 53, 778–783. [Google Scholar] [CrossRef]
- Vuksanovic, B.; Bostanudin, N. Clutter removal techniques for GPR images in structure inspection tasks. Proc. SPIE 2012, 8334, 833413. [Google Scholar]
- Liu, C.; Song, C.; Lu, Q. Random noise de-noising and direct wave eliminating based on SVD method for ground penetrating radar signals. J. Appl. Geophys. 2017, 144, 125–133. [Google Scholar] [CrossRef]
- Kalika, D.; Knox, M.; Collins, L.; Torrione, P.; Morton, K. Leveraging robust principal component analysis to detect buried explosive threats in handheld ground-penetrating radar data. Proc. SPIE 2015, 9454, 94541D. [Google Scholar]
- Song, X.; Xiang, D.; Zhou, K.; Su, Y. Improving RPCA-based clutter suppression in GPR detection of antipersonnel mines. IEEE Geosci. Remote Sens. Lett. 2017, 14, 1338–1442. [Google Scholar] [CrossRef]
- Oliveira, R.J.; Caldeira, B.; Teixidó, T.; Borges, J.F. Influência da forma de onda emitida na comparação de radargramas. Comun. Geol. 2016, 103, 149–154. [Google Scholar]
- Bitri, A.; Grandjean, G. Frequency-wavenumber modelling and migration of 2D GPR data in moderately heterogeneous dispersive media. Geophys. Prospect. 1998, 46, 287–301. [Google Scholar] [CrossRef]
- Tzanis, A. matGPR Release 2: A freeware MATLAB® package for the analysis & interpretation of common and single offset GPR data. FastTimes 2010, 15, 17–43. [Google Scholar]
- Hirani, A.N.; Totsuka, T. Combining Frequency and Spatial Domain Information for Fast Interactive Image Noise Removal. In Proceedings of the 23rd Annual Conference on Computer Graphics and Interactive Techniques-SIGGRAPH 96, New Orleans, LA, USA, 4–9 August 1996; pp. 269–276. [Google Scholar]
- Fialka, O.; Čadík, M. FFT and convolution performance in image filtering on GPU. Proc. Int. Conf. Inf. Vis. 2006, 5, 609–614. [Google Scholar]
- Gonzalez, R.C.; Woods, R.E. Digital Image Processing; Prentice Hall: Upper Saddle River, NJ, USA, 2002. [Google Scholar]
- Lim, J.S. Two-Dimensional Signal and Image Processing; Prentice Hall: Englewood Cliffs, NJ, USA, 1990. [Google Scholar]
- Andrews, H.C.; Patterson, C.L. Singular Value Decompositions and Digital Image Processing. IEEE Trans. Acoust. 1976, 24, 26–53. [Google Scholar] [CrossRef] [Green Version]
- Kamm, J.; Nagy, J.G. Kronecker product and SVD approximations in image restoration. Linear Algebra Appl. 1998, 284, 177–192. [Google Scholar] [CrossRef] [Green Version]
- Sadek, R.A. SVD Based Image Processing Applications: State of The Art. Contrib. Res. Chall. 2012, 3, 26–34. [Google Scholar]
- Ganic, E.; Eskicioglu, A.M. Robust DWT-SVD domain image watermarking: Embedding data in all frequencies. Proc. Multimed. Secur. Work. 2004, 4, 166–174. [Google Scholar]
- Konstantinides, K.; Natarajan, B.; Yovanof, G.S. Noise estimation and filtering using block-based singular value decomposition. IEEE Trans. Image Process. 1997, 6, 479–483. [Google Scholar] [CrossRef] [PubMed]
- Sadek, R.A. Blind synthesis attack on SVD based watermarking techniques. In Proceedings of the 2008 International Conference on Computational Intelligence for Modelling Control & Automation, Vienna, Austria, 10–12 December 2008. [Google Scholar]
- Xu, X.; Dexter, S.D.; Eskicioglu, A.M. A hybrid scheme for encryption and watermarking. Secur. Steganography Watermarking Multimed. Contents VI 2004, 5306, 725–736. [Google Scholar]
- Yang, J.; Lu, C. Combined Twhniques of Singular Value Decomposition and Vector Quantization for Image Coding. IEEE Trans. Image Process. 1995, 4, 1141–1146. [Google Scholar] [CrossRef] [PubMed]
- Moonen, M.; Van Dooren, P.; Vandewalle, J. A singular value decomposition updating algorithm for subspace tracking. SIAM J. Matrix Anal. Appl. 1992, 13, 1015–1038. [Google Scholar] [CrossRef]
- Peña, J.A.; Teixidó, T. Cover Surfaces as a new technique for 3D GPR image enhancement. Archaeological applications. In RNM104—Nformes; Universidad de Granada–Instituto Andaluz de Geofísica: Granada, Spain, 2013; pp. 1–10. [Google Scholar]











Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Oliveira, R.J.; Caldeira, B.; Teixidó, T.; Borges, J.F. GPR Clutter Reflection Noise-Filtering through Singular Value Decomposition in the Bidimensional Spectral Domain. Remote Sens. 2021, 13, 2005. https://doi.org/10.3390/rs13102005
Oliveira RJ, Caldeira B, Teixidó T, Borges JF. GPR Clutter Reflection Noise-Filtering through Singular Value Decomposition in the Bidimensional Spectral Domain. Remote Sensing. 2021; 13(10):2005. https://doi.org/10.3390/rs13102005
Chicago/Turabian StyleOliveira, Rui Jorge, Bento Caldeira, Teresa Teixidó, and José Fernando Borges. 2021. "GPR Clutter Reflection Noise-Filtering through Singular Value Decomposition in the Bidimensional Spectral Domain" Remote Sensing 13, no. 10: 2005. https://doi.org/10.3390/rs13102005