1. Introduction
The use of Global Navigation Satellite Systems (GNSS) data is well established for a range of professional and scientific applications, including atmospheric research. Precipitable Water Vapor (PWV) can be derived from radiosonde measurements, but also estimated with GNSS phase measurements processing techniques [
1]. Zenith Tropospheric Delays (ZTDs) are estimated along with other parameters, such as the station position and receiver clock offset. The estimated ZTD is related to the refractive index of air, it can be used directly in atmospheric models, or ZTD can be used to estimate PWV. These values are of essential interest for accurate short-term weather forecasts.
The use of cost-efficient GNSS equipment is of great scientific interest to meteorology and atmospheric research. Traditionally, atmospheric research and meteorology made use of already existing GNSS infrastructures which were set-up for surveying and geodetic applications. Therefore, low-cost GNSS equipment can be a good solution for regions where (commercial) high grade equipment is not readily available.
Analysing ZTDs or PWV from GNSS receivers has proven to be a valuable tool for analysing and forecasting extreme rainfall events [
2]. Nowadays Numerical Weather Prediction (NWP) models exist that use these parameters in their data assimilation schemes to improve their rainfall predictions [
3]. To estimate ZTD at existing GNSS receivers on the ground, numerous Analysis Centers (ACs) apply techniques such as Double-Differenced (DD) processing of large GNSS networks, or, the stand-alone Precise Point Positioning (PPP) technique [
4]. In contrast to network or relative positioning strategies in general, PPP uses undifferenced GNSS observations and relies on precise satellite clock and positions to be available from the International GNSS Service (IGS). Dual-frequency observations are used to form the ionosphere-free linear combination, which removes the majority of the error associated with the delay in the ionosphere layer, but increases the noise by a factor of 3 [
5]. In the past, estimating ZTD for meteorological purposes using cost-efficient equipment was only possible with single-frequency receivers, which required interpolation of the ionospheric delay from a network of dual-frequency receivers (e.g., References [
6,
7]). Recently, also low-cost dual-frequency receivers became available, which in combination with low-priced antennas, inspired the experiment in this paper. This experiment aims to investigate the potential use of low-cost dual-frequency receivers for ZTD estimation, something that was formerly only possible using expensive receiver equipment, or relied on existing geodetic networks to perform corrections. For this experiment different quality antennas, ranging from geodetic to mass-market, are deployed consecutively on a short-baseline. The new low-cost design of the receiver supplemented by a low-cost antenna may enable the cost-efficient estimation of high-quality tropospheric delays.
For high-precision applications, both satellite and receiver antenna corrections need to be applied [
8]. These corrections are not only frequency dependent, but they also depend on the azimuth and elevation of the transmitting satellite. The delay caused by the antenna and the near field environment is not the same in every direction. Neither is it possible to find, for a specific frequency, a single point in the antenna for which the delay is the same for every direction. Therefore, a geometric center is something that does not really exists, and concepts like Antenna Phase Center (APC) are only approximate. These variations in antenna delay cause errors in the horizontal and vertical position, but also in the ZTD estimation. In order to correct the carrier phase signals for this effect, antenna calibrations are performed. The result of an antenna calibration is represented by a Phase Center Offset (PCO) with respect to a chosen Antenna Reference Point (ARP), and azimuth- and elevation dependent Phase Center Variations (PCV) with respect to the PCO. PCV and PCO corrections are provided per frequency. They are not independent, and should always be used together in high-precision positioning applications. Applications that require less precision can use only PCO values. On the other hand, for ZTD estimation, the PCO values are not important, and only the PCV values matter.
To obtain PCO and PCV corrections, relative and absolute antenna calibrations can be used. Absolute calibrations are typically expensive and involve sending the antenna to a calibration facility, while a relative calibration can be performed more easily by yourself. The relative calibration is performed over a short baseline, with on one side the antenna to be calibrated, and on the other side a reference antenna that has already been calibrated before (see e.g., Reference [
9]). Double-differenced carrier phase residuals are used to compute the relative pattern between the antenna’s. It uses the fact that over short baselines for DD observations most errors (e.g., satellite clock and atmospheric delays) are eliminated. The drawback of this calibration method is that it is a relative calibration. Since 2006 [
10] it has been common for geodetic applications to use absolute antenna calibrations. Therefore, to obtain an absolute calibration for our antenna, we must add the absolute calibration for the reference antenna to the relative calibration. Absolute calibrations are typically obtained from measurements in an anechoic chamber (see e.g., Reference [
11] or Reference [
12]) or robotic field calibrations (see Reference [
13]). Robotic calibrations have the advantage that they are not affected by multipath effects as in a relative correction.
While high quality geodetic antennas are typically manufactured with highest precision to enable the repetition of phase patterns on the receiving phase center, this is only partially the case for low-cost antennas. Companies specialized in antenna calibrations, such as Geo++ [
14] in Germany, generate individual absolute antenna calibrations for geodetic antennas. Absolute antenna calibrations are typically supplied in an Antenna Exchange Format (ANTEX) file [
15] that contains PCO as well as azimuth- and elevation dependent PCV for different frequencies and satellite systems. Various individual calibrations of the same antenna type are averaged to type mean calibrations and distributed, such as by the IGS. Using these antenna patterns is a standard practice in geodesy and essential for high precision positioning and also for tropospheric delay estimations. Several studies were performed that compare the differences between type mean and individual antenna phase center calibrations for example, by Araszkiewicz and Völksen (2016) [
16], Schmid et al. 2005 [
17] and Sidorov and Teferle 2016 [
18]. They found a typical difference of only 2 mm horizontal and up to 4 mm vertical between type mean and individual antenna calibrations. For one antenna an offset of up to 17 mm in the vertical and 10 mm in the horizontal direction was observed. The vertical positioning performance gives an indication about the accuracy of the troposphere estimations since both parameters are correlated [
19]. Only few studies were performed that analyze the impact of the antenna PCV on tropospheric parameter estimations. Ejigu et al. 2018 [
20] investigated the impact of individual and type mean calibrations on Zenith Wet Delays (ZWDs) and tropospheric gradients [
21]. They report a mean ZWD bias of 1.8 mm. A study by Pacione et al. 2017 [
22] demonstrate similar results with ZTD errors in the mm range between utilizing individual and type mean calibrations.
The low-cost GNSS chips, being affordable and produced for the mass-market, are also of interest for scientific applications, but this only makes sense if also a low-cost antenna can be used. Geodetic antennas are generally characterized by special manufactured designs (e.g., choke ring) to suppress multipath induced effects. With low-cost antennas this is typically not the case. An analysis of low-cost antennas is especially important since they are expected to be particularly prone to multipath effects that are reflected in the antenna phase patterns.
In this paper we investigate the PPP ZTD performance of a recently introduced low-cost dual-frequency receiver connected to antennas of ranging quality (geodetic to mass-market) with and without applying relative antenna calibrations. Additionally, using L1-only data we investigate how well the (un-)corrected single-frequency data from the dual-frequency receiver can be used for meteorological applications. This is achieved by trimming the original data to L1-only datasets and generating a second frequency observation with the Satellite-specific Epoch-differenced Ionospheric Delay (SEID) model which is adjusted to the ionospheric delay based on a surrounding dual-frequency network. The paper is structured as follows—
Section 2 describes the methodology, experimental setup and data analysis,
Section 3 illustrates the PPP-derived ZTD results,
Section 4 the discussion and
Section 5 the conclusion.
2. Methods
Our experiment includes several steps to estimate the impact of different quality antennas on the ZTD performance using a low-cost dual-frequency receiver. The fundamental step upon which our investigation is based is a short-baseline analysis to perform a relative antenna calibration. Thereafter, different relative antenna calibration results are evaluated using the ZTD from two different PPP experiments. The experimental setup and overview of the data analysis procedure are described in
Section 2.1 and
Section 2.2. The antenna calibration procedure is explained in
Section 2.3.
Section 2.4 describes the evaluation of the ZTD estimations with dual-frequency data in more detail. The antenna calibration impact on single-frequency data is covered in
Section 2.5.
2.1. Experimental Setup
This subsection describes the test site, instrument setup, data handling as well as the receivers and antennas that were used in the experiment.
Our experiment consists of a series of consecutive short-baseline experiments using the International GNSS Service (IGS) station DLF1 as a base station and a U-blox ZED-F9P as rover. The DLF1 station is located on the rooftop of the Nederlands Metrology institute (NMi) in Delft. The station uses a Trimble NetR9 receiver, capable of tracking most GNSS signals, with a Leica AR25.R3 (LEIAR25.R3) chokering antenna with LEIT radome. The antenna has been calibrated by Geo++. The antenna is installed on the permanent marker with DOMES number 13502M009.
The rover receiver is an engineering sample of recently released low-cost dual-frequency receivers, that was obtained from the manufacturer for testing purposes. It covers the following frequencies: GPS L1C/A, L2C, GLONASS L1OF, L2OF, Galileo E1, E5b and BeiDou B1l, B2l and QZSS L1C/A, L2C. Notably missing GNSS signals are GPS L2P/Y, GPS L5 and Galileo E6. However, with the new generation GPS satellites, the L2C signal becomes rapidly available on almost all satellites and enables obtaining dual-frequency measurements from an increasing number of available GPS satellites. With up to 184 channels available, the receiver is capable of tracking two frequencies on each of the described satellite constellations and is still able to receive correction service data from augmented GNSS (e.g., Reference [
23]).
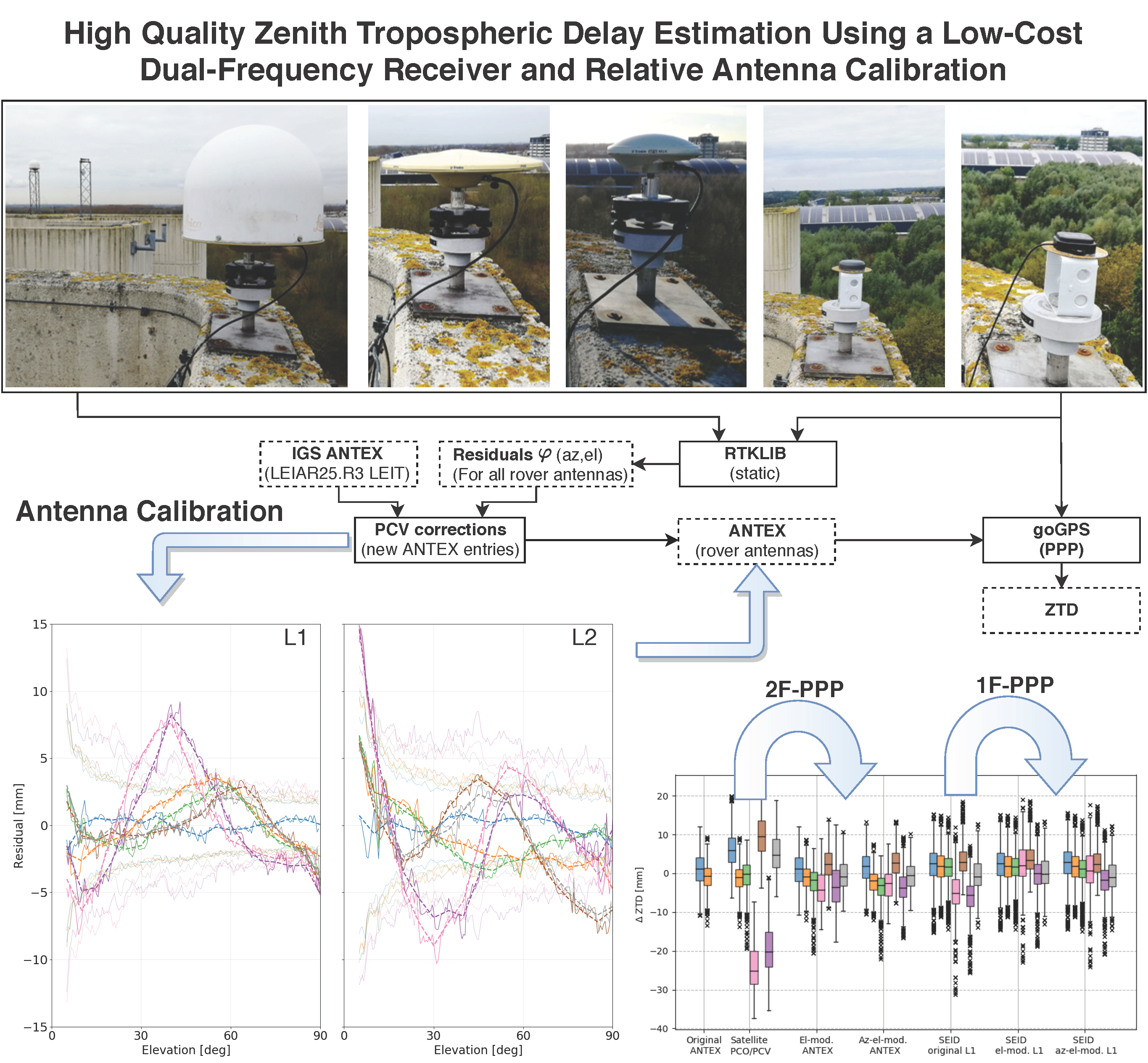
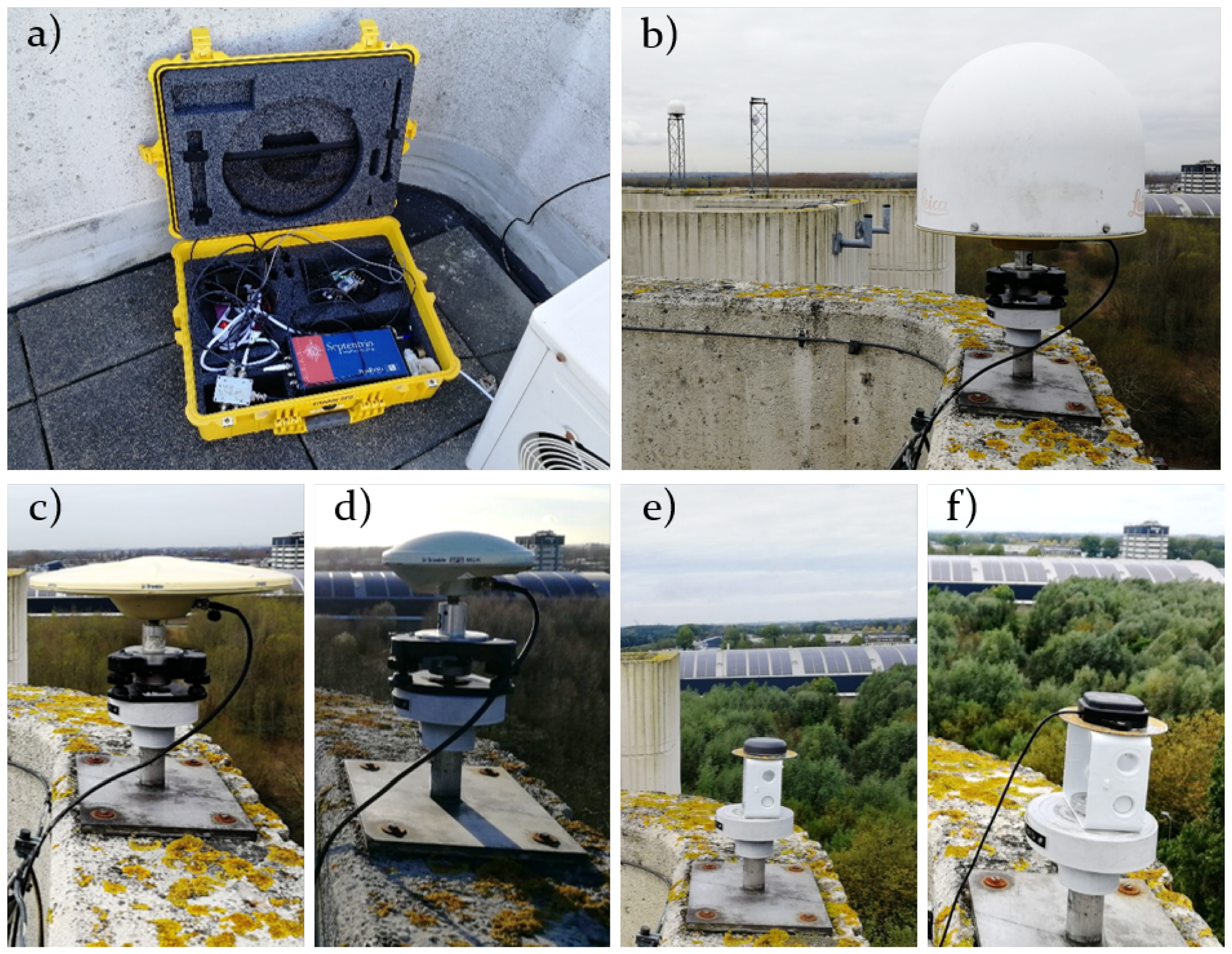
The antennas of the rover are placed on a geodetic marker at a horizontal distance of approximately 10 m and 1.5 m height difference from DLF1. Different antenna types have been installed during consecutive periods from 15 February 2019 onwards. The investigated rover antennas cover a range of prices, starting with the lowest cost antennas U-blox ANN-MB-00 and Taoglas AQHA50 between about 50 and 100 euros, the middle price segment antennas Trimble AV28 and Trimble GA530 and antennas with a price of above 1000 euros, LEIAR25.R3 LEIT and TRM55971.00 NONE (also known as Trimble Zephyr 2 Geodetic). For these antennas, the mount point DOMES 13502M003 (GPS Mark 15) is used (
Figure 1b). The antennas with hole-mount design (Trimble AV28) and without screw-hole at the bottom (U-blox ANN-MB-00) are mounted on top of a metallic rectangular extension bracket and also with a circular metallic ground plane with 10 cm diameter. For the other tested antennas, a tribrach with an adjustable circular level is used. The receiver itself is placed in a pelican case in the proximity and data logging is performed with a Raspberry Pi Zero on a local SD card (
Figure 1a). Depending on weather conditions and observation time, antennas are switched after at least having recorded three full days of raw data. Data is transferred manually from the SD card for post-processing purposes.
The installation environment (regarding near-field effects and multipath) can be regarded as relatively clean. Both antenna positions (DLF1 and GPS Mark 15) are characterized by an unobstructed view over the full horizon. The time frame of antenna placements is depicted in
Table 1. All antennas are active and, depending on the type, require different voltage as input. The antennas GA530, LEIAR25.R3 and TRM55971.00 require 12 V input voltage which cannot be supplied by the Raspberry Pi. Instead, the antennas are powered by a Septentrio receiver and the antenna signal is split to the U-blox ZED-F9P. The other antennas are working with voltage at or below 5 V that is supplied via the USB port of the Raspberry Pi and is considered as stable.
The GA530 lost satellite tracking on L1 on 15 March 2019 17.23 UTC and one day later also L2 data was lost, presumably due to moisture in the antenna connector. Data from 15 March 2019 onwards is therefore discarded from the GA530 observations. The AQHA50 data was not processed due to very low Signal-to-Noise (SNR) ratio, despite free-sky conditions, which we were unable to resolve. After quick and uncomplicated communication with the manufacturer the antenna could be returned and a replacement was provided. It was, however, not examined further in this experiment because of time limitations and practical considerations. A power outage in the Delft region, in the morning of Monday 25 March 2019, ended the data tracking for the LEIAR25.R3 antenna. Except for the AQHA50 antenna, sufficient data have been recorded for the remaining antennas for the analysis. Details about the data logging and conversion can be found in
Appendix A.
The data is analysed in post-processing, with DLF1 as base station, and the antennas under investigation as rover. The rover data is available as 1-s daily RINEX 3 observation files. For the base station data, high-rate (1 Hz) RINEX3 data from the IGS station DLF1 were downloaded. High-rate 15-min RINEX 3 DLF1 observations were merged into daily files. Broadcast navigation data from the satellites were collected from the Crustal Dynamics Data Information System (CDDIS) [
24]. For simplicity reasons and driven by the fact that most antenna calibrations are available for GPS, we used GPS-only data for our analysis.
2.2. Antenna Calibration and ZTD Evaluation Procedure
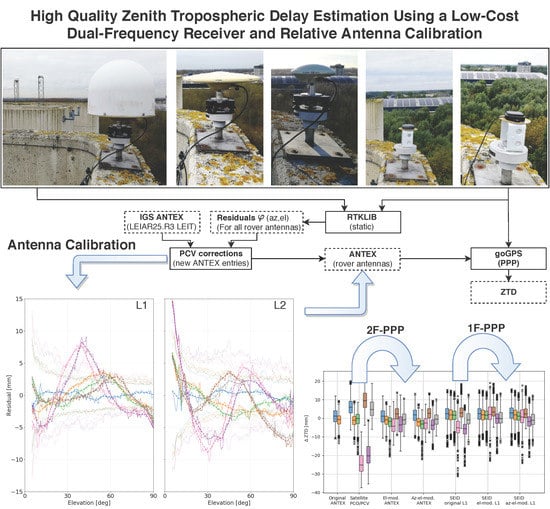
This subsection aims to provide a general overview of the antenna calibration and ZTD evaluation procedure. The experiment basically follows the steps illustrated in
Figure 2. First, the antenna calibration is performed by retrieving residuals in a short baseline experiment, for which errors caused by the troposphere and ionosphere delays can be safely neglected. The original L1 + L2 RINEX data of base and rover were processed in RTKLIB, in static mode, to obtain the carrier phase residuals for each frequency, as well as azimuth (az) and elevation (el) angles of the corresponding satellites. The residuals, that can be considered as relative PCVs, together with IGS ANTEX type mean PCVs of the base station antenna (LEIAR25.R3 LEIT), were processed to create absolute PCVs which are saved in new ANTEX entries for each rover antenna. Details on the antenna types used in the experiment are provided in
Table 1.
Subsequently, the L1 + L2 RINEX data from the rover antennas, with the new ANTEX entries, were processed in goGPS (PPP-mode) to obtain absolute ZTD estimations. The obtained set of ZTD estimations for the low-cost receiver and different antennas was compared against the IGS final ZTD estimations by the US Naval Observatory (USNO) based on Bernese 5.2 in PPP mode from the IGS station DLF1. Further details on the antenna calibration and ZTD estimation procedures can be found in the following subsections.
2.3. Antenna Calibration and Retrieval of New ANTEX Entries
This subsection details the antenna calibration process. It is a fundamental step in our experiment and consists of an elevation-only and an azimuth and elevation dependent correction.
Near-field, multipath and antenna PCVs, summed up as multipath, affect all estimated parameters and residuals in the processing. Objects that are close to the antenna (near-field) affect the antenna patterns especially in the antenna PCO and azimuth- and elevation dependent PCVs. This effect cannot be covered in existing antenna calibrations without conducting the calibration procedure at the same location where the observation is taking place.
The main part of the antenna calibration consists of obtaining satellite phase residuals and is performed using RTKLIB. For each frequency, in our case GPS L1 and L2, the residuals are ‘stacked’ into elevation and azimuth bins. Two types approaches are used: (1) an elevation-only correction by averaging over all azimuth directions and (2) an azimuth and elevation dependent correction.
The GNSS processing engine RTKLIB [
25] is open source and contains a range of Application Programs (APs) to perform real-time and post-processing precise positioning with GNSS data. It employs an Extended Kalman Filter (EKF) to obtain final differential solutions. In our analysis, the baseline processing was performed using the RTKLIB 2.4.3 Command-line User Interface (CLI) RNX2RTKP. Its functions are equivalent to the Graphical User Interface (GUI) program RTKPOST. In its standard configuration the program uses the highest elevation satellite as reference to obtain DDs. The residuals are written to a file for each satellite in view, with a zero value for the reference satellite, actually using a single difference (SD) format to store the DD residuals. For the analysis of the phase center variation we need however SD residuals. To obtain the SD residuals the average of the DD residuals (reference satellite included) must be subtracted from the DD residuals (again reference satellite included). This is the same as using the average DD residuals as reference. In order to use the average DD residuals as a reference, the source code was modified and recompiled. The observed measurement errors now had an expected zero mean of all satellite residuals on each frequency and not only for the highest elevation satellite. In our version the residuals were computed as in previous (legacy) RTKLIB releases. To avoid unintended behavior, the changes were discussed and changed in correspondence with the author of the package on github (see github issue: [
26]).
Table 2 shows the processing settings used for the baseline analysis. Important processing options are the positioning solution to static (-p 3), elevation cut-off 5 degrees (-m 5), AR fix-and-hold (-h) and output residuals (-y 2). For Ambiguity Resolution (AR), the LAMBDA algorithm [
27] is used within RTKLIB. The basic strategy in RTKLIB is to fix the ambiguities to integer after a float solution has been obtained. In our analysis we decided to use the fix-and-hold method. Further details on a conducted sensitivity case study can be found in
Appendix B. The static processing option will strictly constrain the receiver movements for the observation period. It is preferred over a kinematic solution for the residual analysis since the rover antenna position does not change and the measurement errors should reflect this in the residuals and not in the estimated position. Driven by uncertainty about the implementation of applying ANTEX PCV corrections in RTKLIB, the antenna calibrations were not applied directly in the processing. Instead, their influence was analyzed separately. Each observation file of each antenna was processed and the generated output consisted of East, North and Up (ENU) components as well as frequency and azimuth and elevation dependent satellite residuals on code and phase measurements. For the relative antenna calibration, only the phase residuals were utilized.
To reduce noise and avoid outliers in the data, the residuals of each antenna are stacked over generally three selected DOYs (LEIAR25.R3: 79, 81, 83; TRM55971.00: 87, 88, 90; GA530: 65, 66, 70; AV28 with rectangular bracket: 47, 48, 49; AV28 with circular plane: 285, 286, 287; ANN-MB with rectangular bracket: 58, 61, 62) which were selected after a visible inspection. Only the ANN-MB-00 circular plane data is stacked over two days (DOYs 289 and 290) driven by the short observation period and evident outliers in the observed residuals.
In the first approach, the elevation-only phase patterns are visualised based on a first stacking, by taking the mean from all observations within 0.5 degree elevation bins. Afterwards, to correspond to the ANTEX standard, the stacked elevation-only phase residuals were averaged to 5 degree elevation bins using a moving-average filter. The resulting smoothed curve is shifted and start and end point (5 and 85 degrees) are substituted with the fitted data from a 10th order polynomial that was fitted over the 0.5 degree data. The resulting smoothed residual curve is the relative antenna calibration PCV (see also
Section 3.1).
For the second approach, the azimuth and elevation dependent calibration, the number of residuals in each bin is not very large, and there will be many bins that are empty. To obtain meaningful azimuthal PCVs one should typically use longer observation time spans and rotate the antenna during the experiment in order to sample all azimuth directions. Since our experiment did not include rotating the antenna, and the observation period is only a few days, we do not expect very reliable azimuth corrections. To obtain azimuth dependent antenna patterns, the observed residuals were averaged over 5 degree elevation and azimuth bins and stacked over selected days. Since these measurements are generally noisy, the binned residuals are looped through the elevation bins and smoothed by fitting a 10th order polynomial to the data. To avoid evident outliers by fitting a polynomial to the data, gaps and missing data (especially in the North direction, see also
Section 3.1) are filled by the nearest value from the current elevation bin. The 5 degree binned data used for the PCV calibration are taken from the resulting fitted polynomial curves.
For both approaches, to obtain absolute PCVs for each tested antenna, the estimated relative PCVs (averaged residuals) must be added to the absolute PCV of the base station antenna. For the absolute PCV of the base station antenna (LEIAR25.R3 LEIT) we used the IGS type mean azimuth and elevation dependent PCVs. Equation (
1) shows how the rover antenna PCV is created:
The superscripts
b and
r denote the base and rover, the subscript
i the frequency,
and
the azimuth and elevation angles. By adding the estimated relative PCV of the rover (
) to the absolute base antenna PCV (
), we obtained the absolute PCVs (
) for the tested antenna. To use the newly generated PCVs in PPP tests, a new entry for each antenna was added to, or replaced in, the ANTEX file. Though individual calibrations are available for our base station antenna, we use the IGS I14.ATX ANTEX file that contains type mean calibrations for the base antenna PCV. A recent study by Araszkiewicz et al., 2019 [
28] investigated the height variation on the LEIAR25.R3 antenna with type mean and individual calibrations. They conclude that both methods show similar results.
For each approach (elevation-only and azimuth-elevation), a new ANTEX file is created with one new entry for each antenna that can be used for ZTD estimation using PPP. In this way, the antenna names given in the RINEX files do not have to be modified by instead supplying a respectively differently generated ANTEX file.
2.4. Evaluation of ZTD Estimates from Dual-Frequency PPP
This subsection describes the PPP processing configuration and ZTD evaluation procedure with dual-frequency GNSS measurements.
To estimate absolute ZTD values and to evaluate the newly obtained antenna PCVs, the open source tool goGPS [
29] was used. Its ZTD estimations are comparable to existing reference datasets [
6,
7]. The ZTD results are computed for all available DOYs and compared to IGS final ZTD estimations from the IGS station DLF1 [
24] in approximately 10 m distance. The closest available data point from the high rate ZTD estimations was used to match the IGS reference (5-min) interval.
We used goGPS PPP with the same configuration for all runs but with different ANTEX file configurations for the different antennas. The goGPS configuration used for our comparisons can be found in
Table 3. The concept of the ZTD evaluation is summarized in
Figure 3.
For all goGPS ZTD estimations, data from GPS-only satellites were used. An elevation cutoff angle of 10 degrees and ocean loading effects obtained from the FES2004 model [
30] were applied. The IGS antenna calibration, final orbits, 30-s satellite clocks and earth rotation products were used [
31].
The ZTD analysis consisted of up to five different cases. Two of our tested rover antennas, the LEIAR25.R3 LEIT and TRM55971.00 NONE, had already calibration entries in the IGS ANTEX file. This provided another set of PCVs for testing with PPP and serves as a verification of our estimations. The first case consists of the verification antennas (LEIAR25.R3 LEIT and TRM55971.00 NONE antennas). For this, a goGPS PPP run is performed using the original IGS I14.ATX ANTEX file. To investigate the impact of not using an ANTEX file at all, another run without the ANTEX file was performed in a second run. The third case applies only satellite PCO/PCV corrections by removing the receiver antenna-specific entries. The last two cases evaluate the elevation-only and azimuth-elevation corrected ANTEX entries obtained from the calibration step. One has to note that the full observation period (up to ten days observed data) is used as RINEX input for the ZTD estimation, while only two or three days are utilized to compute the PCVs.
If one runs PPP software, for example, goGPS, over which one has full control, one can use the newly generated ANTEX entries directly in the software. However, when PPP is performed in a server environment, one does not have the possibility to modify the ANTEX files. In these cases it is more convenient to correct the original RINEX phase data for the antenna patterns. To achieve this, we corrected the original RINEX phase data for the PCV estimations retrieved from the calibration step by the following formula:
where
is the corrected phase data on frequency
i and
the original RINEX phase observation.
is the azimuth and elevation dependent antenna phase pattern on frequency
i.
denotes the wavelength on each frequency. A comparison between ANTEX-corrected and RINEX-corrected PPP ZTD comparisons resulted in no or negligible differences.
2.5. Evaluation of ZTD Estimates from Single-Frequency PPP
This subsection illustrates the single-frequency ZTD evaluation using the Satellite-specific Epoch-differenced Ionospheric Delay model (SEID) from a surrounding dual-frequency network. PPP uses the ionosphere-free linear combination to eliminate the first order effect of the ionospheric delay error. The drawback of this method is that the errors and multipath on L1 is increased by a factor 2.546, and on L2 by a factor 1.546. The effect is that, when the errors are not correlated, the noise of the ionosphere free linear combination is increased by a factor 3. Also for antennas that are sensitive to multipath, or are placed in a multipath-prone environment, this effect may cause the performance to decrease significantly. In these cases the performance of using L1-only measurements may outperform the dual-frequency ionosphere-free linear combination results (see also Reference [
32]).
Instead, the SEID algorithm [
33], combined with L1 data, generates a synthesized L2 measurement by utilizing data from a network of existing dual-frequency receivers. The synthesized signal contains in principle the same information as L1 but is adjusted to the ionospheric delay on that frequency based on the dual-frequency measurements from the surrounding network. This effectively reduces the noise effect. As part of the evaluation, we apply the SEID model on L1-data using a network of three receivers. By removing the second frequency observations from the RINEX data and correcting the L1 data for elevation and azimuth-elevation patterns, we also investigate the performance of the SEID algorithm on L1-corrected data. Though stations in the close proximity to DLF1 are available, the outside station network distances are chosen between 55 and 130 km to simulate a more realistic scenario to densify existing networks. The SEID evaluation process is depicted in
Figure 4.
The following section describes the results of the experiment by analyzing the satellite phase residuals and ZTD estimations.
5. Conclusions
In this paper we investigated the PPP ZTD performance of a recently introduced low-cost dual-frequency receiver (U-blox ZED F9P) in combination with different antennas, ranging from geodetic to mass-market devices, with and without applying relative antenna calibrations. The conducted experiments demonstrated that the U-blox ZED-F9P dual-frequency receiver is very well capable to produce high-quality results, with the limiting factor being the quality of the receiving antenna. However, our results show that, using a simple-to-apply method to correct for the PCV of cost-efficient receiver antennas, high quality results are achievable even for low-cost antenna. This is demonstrated by a field experiment, resulting in ZTD estimations of similar quality as with high-grade antennas.
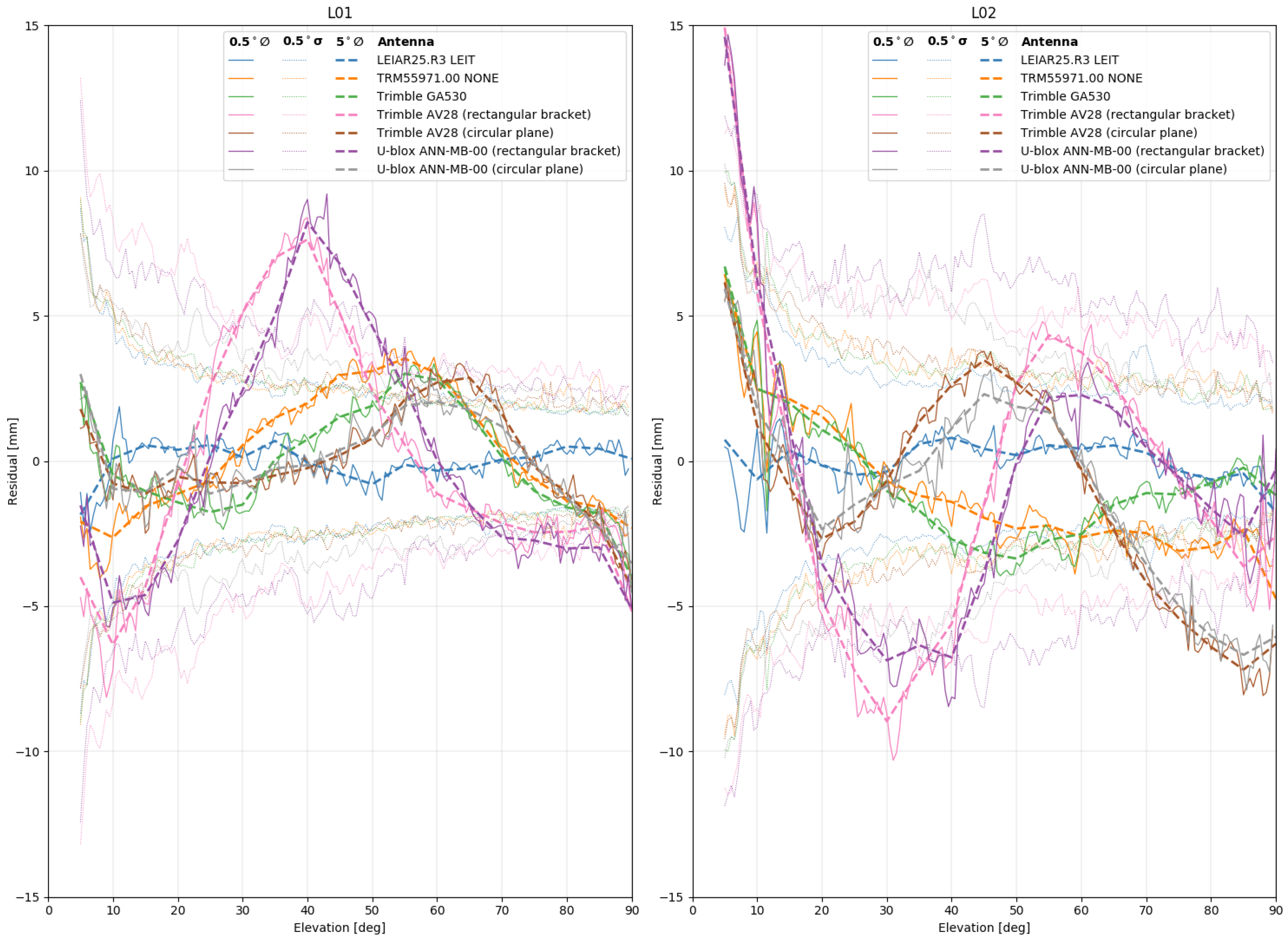
The phase residuals with different antenna types were analyzed over a short baseline. The aim was to do a relative antenna calibration. The absolute antenna calibration pattern can then be computed from the absolute antenna calibration of the reference antenna and the relative calibration result from the short baseline experiment. For two of the tested antennas, the AV28 and ANN-MB-00 antennas, when used with a rectangular bracket as mounting point, very prominent elevation-based patterns were found (see
Figure 5). These cases result in the highest RMSE phase residuals when compared to other antennas.
Figure 6 indicates azimuth dependent patterns with strongly fluctuating amplitudes. The rectangular bracket presumably caused high residuals for L2 close to the horizon, but also in East and West direction for L1. Smaller residuals were obtained after repeating the experiment with a circular ground plane. These results showed that our approach is working, regardless of the size of the residual patterns. This suggests that our approach is feasible for even more challenging, multipath-prone environments. Additional uncertainty may be introduced by the smoothing technique we used to obtain PCVs in the 5-degree bin size required by the ANTEX standard. A lower binning size may further improve the results. Considering that only three days of data were used for the calibration, and that the antenna was not rotated, many of the azimuth-elevation bins were without data or had only few observations. For this reason the elevation-only based calibration is preferred over the azimuth-elevation based calibration.
The impact of the different antenna PCV corrections on PPP ZTD estimations has been analyzed for the tested antennas. Our results confirm that antenna pattern corrections are essential for PPP ZTD estimations. Applying satellite PCO/PCV corrections significantly decreases the standard deviation in the ZTD error compared to using no ANTEX corrections at all. Without applying receiver antenna corrections, the ANN-MB-00 and Trimble AV28 antennas with a rectangular bracket, resulted in a ZTD bias between −20 and −24 mm and similar standard deviations. With a circular plane the effect could be partially mitigated, but biases in the order of about 9.5 mm and 5.3 mm remained. The results suggest that a phase pattern is present for the low-cost antennas which we address by applying a relative antenna calibration. Applying elevation or azimuth-elevation dependent corrections to the data reduced the ZTD bias significantly and lowered the standard deviation. For example, when using the azimuth-elevation dependent corrections on the ANN-MB-00 antenna, the bias in the ZTD was reduced to −0.52 mm and an RMSE to only 3.77 mm. Results for the other antennas, and using elevation only patterns, were similar. This shows that the ZTD estimations achieve an error level that is comparable to high-grade antennas. Though the biases for ANN-MB-00 (rectangular bracket), AV28 (circular plane) and AV28 (rectangular bracket) could not be completely removed, they were reduced significantly to a level that makes the observations useful for tropospheric analysis.
The ionosphere-free linear combination used by the PPP solutions is very noisy. The noise in the L1 and L2 data, including the errors in the relative calibration, is basically tripled. For this reason we also looked at only using the L1 data in combination with the SEID algorithm to generate L2 data from an existing network of geodetic-grade receivers. In case no PCV correction is done for the receiving antenna, the bias and standard deviation in ZTD for the GA530, AV28 and ANN-MB-00 antennas, were smaller using L1 with SEID generated L2 data, than for the original dual-frequency data. This is a clear indication that the ionosphere-free linear combination on the original L1 + L2 data is considerably amplifying the noise present in the datasets. Using SEID in combination with the elevation or azimuth-elevation based L1 corrected data removed the biases almost entirely. The results are of comparable quality to ZTD estimations derived from the dual-frequency results.
This experiment uses exclusively GPS observations. As many of the low-cost receivers can track multiple GNSS systems, expanding the antenna calibrations to include multi-GNSS may further increase the application of the presented approach. Another interesting experiment would be to perform an absolute antenna calibration by a specialized company on low-cost antennas and compare their calibrations to our results. Further work is needed to investigate, if the observed pattern is reproduced (or differs) from other antennas of the same model, so that the observed elevation-based phase pattern of an antenna can be applied to other antennas of the same model. This will be subject of future experiments.




{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}






