1. Introduction
High Frequency RADAR (HFR) measurements of surface currents in the coastal ocean have become a standard and cost-effective component for ocean observing systems globally [
1,
2,
3]. Developed more than four decades ago [
4], oceanographic HFR provides highly accurate synoptic observation of large scale coastal circulation features at high temporal and spatial resolutions not readily obtained using conventional instrumentation [
5,
6]. HFRs now constitute a fundamental component of coastal observing networks, due to: their utility in understanding processes such as air-sea interaction, coastal circulation and tidal flows; their ability to support search and rescue operations, and the direction toxic-spill mitigation activities; and as tsunami early-warning systems [
1,
2,
3].
HFR systems rely on the backscatter of vertically polarized electromagnetic energy in the 3–50 MHz frequency range to observe the sea surface state. Results are obtained on the basis of the Bragg scatter mechanism and Doppler shift of the first-order Bragg spectral lines [
2,
4,
7]. An individual HFR system operated in a conventional monostatic configuration maps the depth-integrated component of an ocean current advancing towards or receding from its associated receiver [
4]. Depending on the operating frequency, this measurement is representative of the top 0.5–2.5 m layer of the ocean [
8]. Multifrequency HFR systems, such as for instance [
9,
10,
11,
12], therefore allow for the vertical resolution of the velocity profile within a water column. Two or more HFRs overlooking the same patch of ocean from different locations are required to resolve the two-dimensional current field in the area of common overlap.
Based on the approach used to resolve the azimuth of the first-order Bragg spectral lines, oceanographic HFR systems may be broadly classified as direction-finding or beam-forming systems. Direction-Finding, as implemented commercially by SeaSonde [
13] and similar systems developed at Wuhan University [
9,
14], employ directional antennas with differing orientations and the principals of Radio Direction Finding (RDF). Beam-forming, as per the commercially available Wellen RADAR (WERA) systems [
15], similar systems developed by the University of Hawaii [
16,
17], and PISCES [
18], employ an array of similar receiving antennas and combine their output to focus attention on reflected signals originating from a predefined grid cell. Performance, advantages and disadvantages of the two approaches have been discussed extensively elsewhere (for instance, [
19,
20]), and will not be discussed further as they are outside the scope of the present paper.
Regardless of the approach to the azimuthal resolution in the receiver, most oceanographic HFR systems commonly utilise a wide-beam “floodlight” transmission to “illuminate” an entire coastal ocean region of interest. This illumination may be accomplished with either an omnidirectional antenna (SeaSonde and similar systems) or broadly directional antenna array (WERA and similar systems). A third type of oceanographic RADAR system exists for the Very High Frequency (VHF) band, where reduced wavelength and consequently antenna dimensions, allow the combination of narrow-beam synthetic aperture arrays for both directive transmission and reception on a common steerable antenna, resulting in improved sensitivity [
21].
Other types of RADAR systems exist and operate well into the microwave “X-Band” region. These extremely short wavelengths allow the use of the highly directional and extremely compact rotatable antennas on which the operation of these systems rely. These antennas consist of a large number of phased slot or stripline antenna arrays. These systems exist at the opposite end of the radio spectrum where physical size of multi-wavelength structures is not a limiting factor in deployment. Examples of applications may be found in [
22].
In general, direction-finding systems tend to be more compact than their beam-forming counterparts, largely due to the use of the more compact co-located receiving antennas. A gated transmission signal, namely Frequency Modulated Interrupted Continuous Wave (FMICW), allows for the further co-location of the transmit and receive antennas on a single mast. In contrast, beam-forming systems typically use a distributed receive array extending over several wavelengths and utilise a separate directional transmit array. This physical separation and directionality are necessary to prevent saturation of the receivers by the uninterrupted transmitted signal.
Broad-beam directionality in the transmit pattern is clearly an advantage for both types of HFR systems to minimise unwanted transmission over land and to ensure that the coastal ocean is illuminated as uniformly as possible. However, directionality often comes to the detriment of antenna dimension, complexity, and the overall land-area required for deployment. In general antenna dimensions and spacings vary in proportion to wavelength, , and consequently the area taken up by . In the and allocations, the dimension and spacing of the transmit antennas become a limiting factor in relation to the development of directive arrays.
In the long-range (
and
) HFR bands, SeaSonde systems use an approximately 9 m tall bottom-fed, center loaded element with/without a capacitive top-hat, resulting in a physically short vertical element (<0.25
) with an electrical resonance in combination with the grounding system corresponding to
[
23]. The SeaSonde loading coil consists of two sections
and
. The coil
may be bypassed with a shorting strap to assist in providing a better match. This is adjusted at installation as required. A capacitive top hat may be similarly installed but is generally only required on the
band.
A single-element vertical antenna is typically characterised by an omnidirectional radiation pattern. Directivity may be achieved through deployment of a second transmit antenna closely spaced, typically less than
, and suitably phased so as to cancel radiation to the rear creating the simplest of end-fire arrays. In the SeaSonde systems, this arrangement is known as dual-transmit set up [
24]. This end-fire antenna array is generally oriented orthogonally to the coastline in order to reduce radiation directed to its rear, over land, and thus minimise unwanted signal propagation towards terrestrial services operating within the transmitted frequency band. More complex arrangements with 4 or more driven elements are commonly used in phased array HFR systems. The WERA-type transmit antenna array achieves a forward beam with enhanced cancellation along the coast, particularly towards the receive array, through appropriate phasing of four vertical driven elements [
15], arranged in a rectangular shape with typical
spacing (across and along the shore, respectively).
In an attempt to reduce the dimension of HF band antennas, Gupta et al. [
25] proposed a dual-band, Electrically Small Antenna (ESA), which can be tuned in the mid and upper HF band with the aid of a variable capacitor. A high performance compact antenna prototype for HF radar was proposed in [
26,
27], based on the concepts of Meandering Line Antenna (MLA) and helical element. The latter two designs included multi-element folding, to increase radiation efficiency and improve impedance matching; and, a conducting plane reflector, to improve gain [
26]. The antenna had multiband capabilities with overall compact sizes [
27].
Other types of directive antennas are available, especially for phased-array systems, which make use of either Yagi-Uda [
28] or log-periodic antennas [
18]. A Yagi-Uda antenna typically consists of dipole or folded dipole elements spaced 0.1–0.25
, with one resonant driven element, one (but occasionally more) passive subresonant reflector element and a number of passive, progressively superresonant, director elements that determine directivity and gain, which both increase with the number of passive elements used [
29]. Superficially similar in appearance to Yagi-Uda, a typical log-periodic antenna consists of a sequence of driven elements, with spacing intervals following a logarithmic function of the frequency, and with element sizes gradually decreasing in length along the main antenna axis. In both cases, the design exhibits a directive radiation pattern [
30,
31,
32,
33,
34,
35,
36,
37] and a large range of operating frequencies for a variety of purposes.
In 2012, as an attempt to regulate radio spectrum usage and band sharing between HFR systems and with pre-existing services, the International Telecommunication Union (ITU) allocated dedicated radiodetermination frequency bands (
Table 1) and defined an operational framework for ocean HFR systems. Resolution 612 [
38], Report ITU-R M2.234 (11/2011; [
39]) and Recommendation ITU-R M.1874-1 (02/2013; [
40]), set additional operational constraints, such as: low-power transmission, multiple levels of filtering, and use of band-sharing capabilities. Use of directional antennas where applicable and as required is also recommended to reduce the peak effective isotropic radiated power (EIRP) in the direction of the receiving antenna array backlobe, and over land ([
38,
39,
40]).
As part of the Australian Integrated Marine Observing System (IMOS), WERA and SeaSonde HFR systems have been deployed along the Australian coast since 2007 to map for instance boundary currents, waves and their interactions, and eddies [
42,
43,
44]. In Australia, HFR systems operate within the ITU Region 3 Radiodetermination Bands (
Table 1) with secondary-type licenses, on the basis of no-interference to primary users or pre-existing secondary users within and under no circumstances outside the allocated frequency bands.
In the initial stages of deployment, SeaSonde HFR systems along the coasts of Western Australia and South Australia (WA and SA) were set up with the dual-transmit antenna arrangement; however, difficulties associated with stability, particularly of the tuning and feeding arrangements required to maintain the correctly phased input to each element, made this solution impractical, and systems were returned to the single element transmit antenna configuration.
Operation of IMOS SeaSonde systems has often caused interference to both primary and pre-existing secondary services at various locations across the country. Prior to their decommissioning in 2017 SA Bonnie Coast (BONC) systems were operated at reduced power and bandwidth in order to mitigate interference being caused to inland communications sites. More recently SeaSondes deployed in 2017 near Newcastle north of Sydney (NEWC), New South Wales (NSW), are the most heavily impacted. The latest complaints originated from interference to two
fixed and mobile communications services operated on
and
as remote area travellers safety networks [
45]. These incidents have resulted in several breach warning notices issued by the Australian Communications and Media Authority (ACMA) under the Radiocommunication Act 1992 [
46] and eventually precipitated a prolonged (1 year) operational interruption whilst acceptable solutions were identified and implemented. Under directions from ACMA, the IMOS Ocean RADAR Facility were required to implement remedial measures before resumption of operations at the sites would be permitted, and pursuant to the relevant ITU regulations [
38,
39,
40]. These measures included minimisation of transmission power, improvement of out-of-band emissions, band-sharing capabilities, and the installation of directional transmit antennas.
In the initial stages, attempts to restore operation were made. Transmit power was reduced to a minimum achievable with the available hardware and software; sweep bandwidth and centre frequency were adjusted to try avoid the impacted frequencies. However, despite this use of limited transmit power and reduced operational bandwidth, the transmitted chirp signal was still being reported at unacceptable levels by the impacted services and further work was therefore required.
Several upgrades to the hardware and firmware have been provided by the system manufacturer, in order to improve filtering capabilities and reduce out-of-band leakage. A periodic transmission cycle was established, to reduce band occupancy. The feasibility of a listen-before-talk mode was also explored, which could take advantage of the periodic transmission cycle to perform frequency scans and dynamically adjust operational parameters accordingly [
45]. The issue of providing a directional antenna at each of the sites remained.
The possibility of deploying phased-array transmitting antennas at the NEWC sites was considered; however, site logistics including steep and uneven terrain, proximity to cliff edges, and dense scrub have made such an undertaking unfavourable. Consequently a different approach became necessary resulting in a novel transmit antenna design with the desired properties of: broad-beam directionality, predominantly vertical polarization and straightforward deployment. This paper documents the design, deployment and validation of the proposed directional transmit antenna for the long-range (4 and ) ITU bands that is currently used operationally at the NSW SeaSonde sites, and will soon be deployed in WA.
Section 2 introduces the concepts of the electrically small loop and the travelling wave antennas which form the basis of the proposed design for the directive antenna described in this paper. We also describe the modelling approach used to design the antenna, along with the strategy adopted for testing, constructions and to confirm the resulting antenna pattern at our sites.
Simulation outputs of antenna designs for: the baseline SeaSonde monopole; our initial and final prototypes, tested at field trials conducted in WA; and our final antenna designs deployed at our SeaSonde sites in NSW are presented in
Section 3 along with relevant field measurements collected. Finally we present a comparison of these data sets.
Section 4 and
Section 5 report the implications and the possible extension to different frequency bands and other applications which would benefit from the use of a directional pattern.
2. Materials and Methods
2.1. Development Process
Our investigation commenced with an extensive literature review and some basic modelling of terminated antennas. The insight gained in the preliminary stages, along with the realization that low gain was not a limiting factor, led to the design of an initial prototype and its subsequent field testing. Further modelling was then undertaken to confirm the feasibility of changes to the design to overcome perceived deficiencies resulting from our preliminary field trials. Our second prototype was successfully tested. Design and material changes were then made with the view of a permanent installation at the NSW sites. The antenna was finally deployed and tested at the first NSW site. Further adaptations were modelled and installation of the modified design was completed at the second NSW site.
2.2. The Travelling Wave Loop Antenna
In a resonant antenna, the antenna acts as a resonator and radio frequency energy travels in both directions bouncing back and forth between the unterminated ends of the antenna in the form of a standing wave. The feed-point impedance is highly dependent on feed-point position and the operating frequency in relation to the natural resonant frequency of the antenna structures. Matching circuits are frequently employed to facilitate operation of such antennas at a required frequency.
To the contrary, when a horizontal wire over a ground plane is terminated at one end with its characteristic resistance, radio frequency current travelling on the wire towards the termination is not reflected. Setting up a feed point at the opposite end to the termination establishes a distinct and desired directional preference [
47,
48,
49].
The travelling wave phenomenon was first noted and exploited by Beveridge [
50] and independently theorised by Rice and Kellogg as reported in their three way collaboration [
51]. Some other pioneering examples and analysis of travelling wave antennas can be found in [
52,
53,
54,
55,
56].
Bush [
57] describes a directional antenna similar in concept to our Vertical Half Rhombic prototype (VHR) for broadband coverage. However, little to no information is given in [
57] regarding its directional properties, which will vary greatly over the frequency range specified in the paper.
A travelling wave antenna behaves similarly to an open wire balanced transmission line terminated with its characteristic resistance. In this case energy passes in a single direction on the transmission line and is dissipated in the termination. The design of an open wire transmission line places its emphasis on minimal energy loss due to radiation by close spacing of the conductors and maintaining current balance. Conversely in the case of the travelling wave antenna the elements are arranged so as to enclose a larger area in an attempt to couple as much energy as possible into free space in the single pass before any remaining energy is dissipated as heat in a termination load. Some designs feed the energy that would be dissipated back to the feed-point, however any such design is likely to introduce a frequency dependence which may undesirably limit the operational bandwidth.
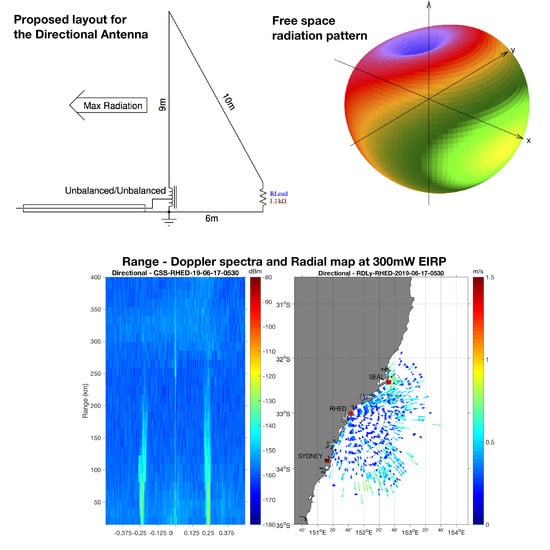
In its simplest design, the proposed directional transmit antenna, called Travelling Wave Loop Antenna or TWLA, requires a wave-guide, a load (or termination) resistance, a broadband feed-point impedance matching circuit, and a support structure (
Figure 1).
It is based on the concepts of electrically small wire loop antenna and travelling wave propagation on a guiding structure [
47,
48,
52,
53,
54,
55,
56].
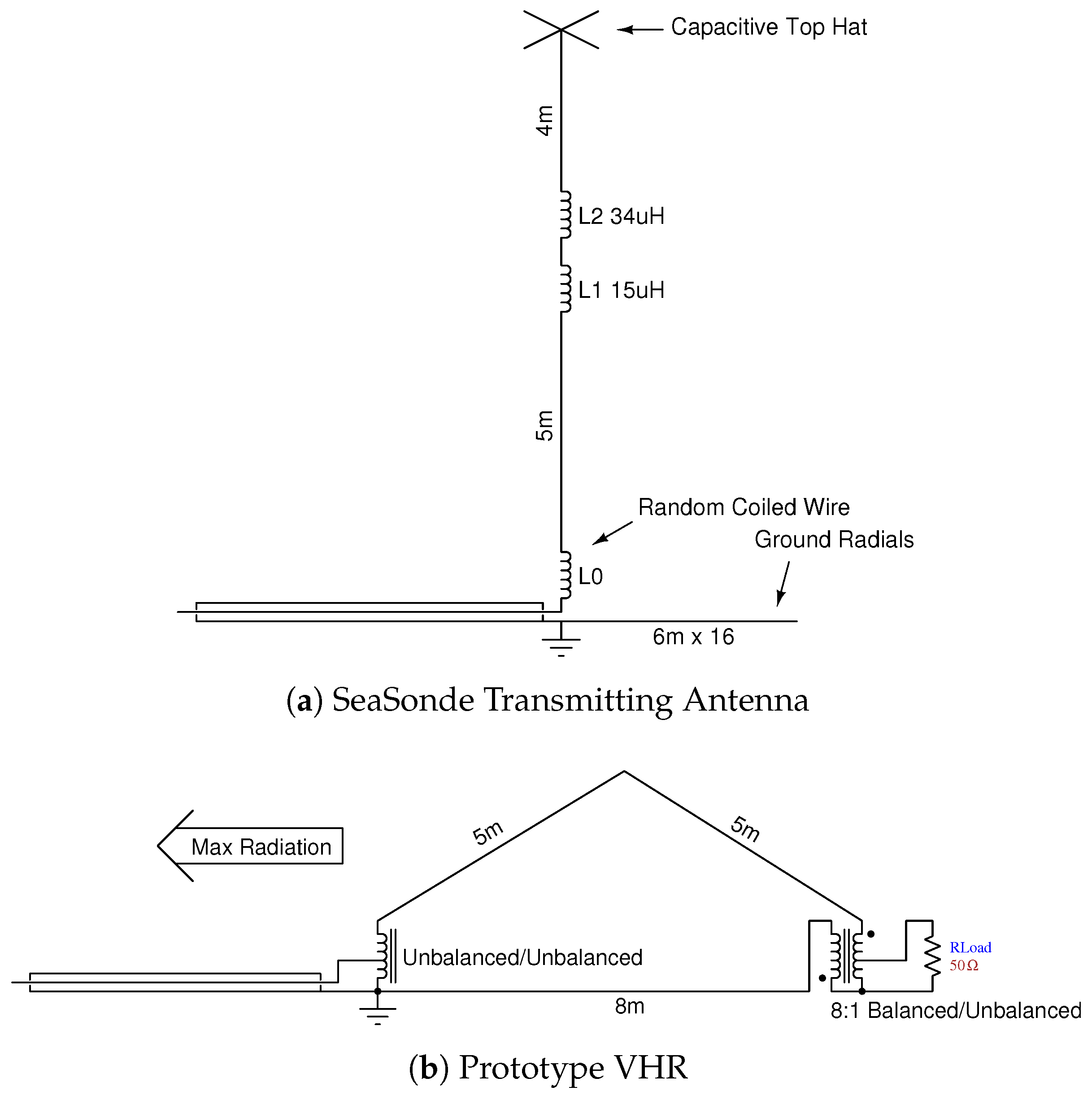
The proposed directional transmit antenna is a triangular loop with a feed-point and resistive termination located at the two lower apices. For convenience, when adapting an existing SeaSonde system, it is possible to utilise the commercial SeaSonde transmit (TX) whip element with the centre loading coil removed, as both a support and one side of the triangular loop. The addition of two
316 stainless steel wires, connected to the top and bottom of the whip, which meet at the third apex of the triangle where they are connected via a terminating resistive load, complete the antenna. In this geometry, the main radiating lobe is directed away from the termination load resistance back over the antenna feed-point (
Figure 1c,d). Additional guy ropes are attached to the top apex in order to support the wire which is clamped to the top of the whip with a standard SeaSonde top-hat adaptor. Stainless steel hose clamps may also be used to make the required connection if the top hat adapter is not available. The TX whip acts both as a support structure and as part of the radiating element, in combination with the stainless steel wires.
2.3. Modelling and Simulation
Several antenna configurations were modelled and a number of prototypes tested before settling on the final design. Modelling the standard SeaSonde transmitter element was performed with the purpose of having a known reference to quantify the TWLA gain or loss. Although rather course, given the simplifications involved with modelling the environment and large number of unknown factors affecting measurements, the reference such as it is remains useful.
The geometries of candidate and reference antennas were modelled using xnec2c, a GUI version of the NEC-2 (Numerical Electromagnetics Code version 2.0 [
58,
59,
60,
61]) ported to the C programming language [
62,
63]. The cocoaNEC2.0 version 0.9.4.1 [
64] was also used. NEC models antennas as combinations of individual straight wire segments automatically derived from a larger geometric description of the desired structures in a Cartesian coordinate system.
Our initial work and feasibility involved looking at simulation results of an electrically small Vertical Half Rhombic (VHR) design, on the basis of fundamental knowledge of travelling wave principals as applied to a full-scale sized Rhombic Antenna.
The VHR configuration (
Figure 1b) is simple to implement with only three essential wires, but additional short elements were added for feed-point and terminating load for the convenience of trying other configurations without having to adjust the feed-point and load segment locations. Segment numbers and lengths were adjusted to keep them short with respect to the wavelengths of interest.
Software simulations for the vertical Half Rhombic were performed initially feeding the antenna at a single feed-point with unit voltage; the terminating load resistance was initially set to around and was adjusted while observing the affects on antenna radiation pattern, gain, feed-point impedance and frequency response over the and ITU bands, in particular, and wider frequency ranges, in general. These initial simulations were used to establish a starting point for prototype design and the associated field trials, and suggested that in general electrically small antennas typically have high losses in the order of ( to ).
The conventional SeaSonde transmit antenna was modelled as simple 10 m long vertical wire fed at the antenna base; in these initial simulations, the centre load was not included. Later models include the centre loading coils. The unknown inductance at the base of the antenna, added in consideration of the random coiling of excess wire usually present, has not been modelled at this time.
Simulations were performed both for the standard SeaSonde transmitter element and the proposed TWLA with different configurations and environmental conditions, such as the simple linear cliff model, so as to develop an insight into the types of effects deployment site conditions may potentially produce.
2.4. Impedance Matching
Due to the termination and consequential lack of reflected energy at the feed-point of the antenna, the feed-point impedance is found to vary only a few Ohms over the entire radio determination band of interest. Small variations in feed-point matching such as those observed represent less than and therefore can be well matched with a broadband matching transformer. Initial modelling suggested the antenna should have a feed-point impedance of 400–500 giving an impedance ratio of around 8:1 to 10:1. This translates to a turns ratio of :1–:1 14:5–16:5.
Commonly available balun (balanced-unbalanced) designs employ a 1:2 turns ratio giving a 1:4 impedance ratio, deemed not particularly suited to this task.
Another common design of unbalanced-unbalanced transformer for high impedance loads employ a 1:7 turns ratio, with a two turn primary; however, this results in impedance matching steps of over per turn. A closer match to the desired 1:10 impedance ratio starting point can be obtained with a 5:16 turns ratio, resulting in a significantly smaller step size of a little over when adjusting the number of secondary turns.
Increasing the number of primary turns too greatly has a rapidly diminishing return as the inductance of the winding starts to rapidly increase. The potential for core saturation also may represent a problem since an increased number of turns represents a higher magnetic field for any given current and hence reduces the output power at which saturation will occur. Core saturation is a limiting feature of a balanced-unbalanced transformer design as operating above this point will produce heating and non-linear effects potentially producing unwanted harmonics.
Extrapolating from a typical 1:4 design by extending the secondary region of the windings around the toroid produces a balanced-unbalanced transformer at any desired integer turns ratio.
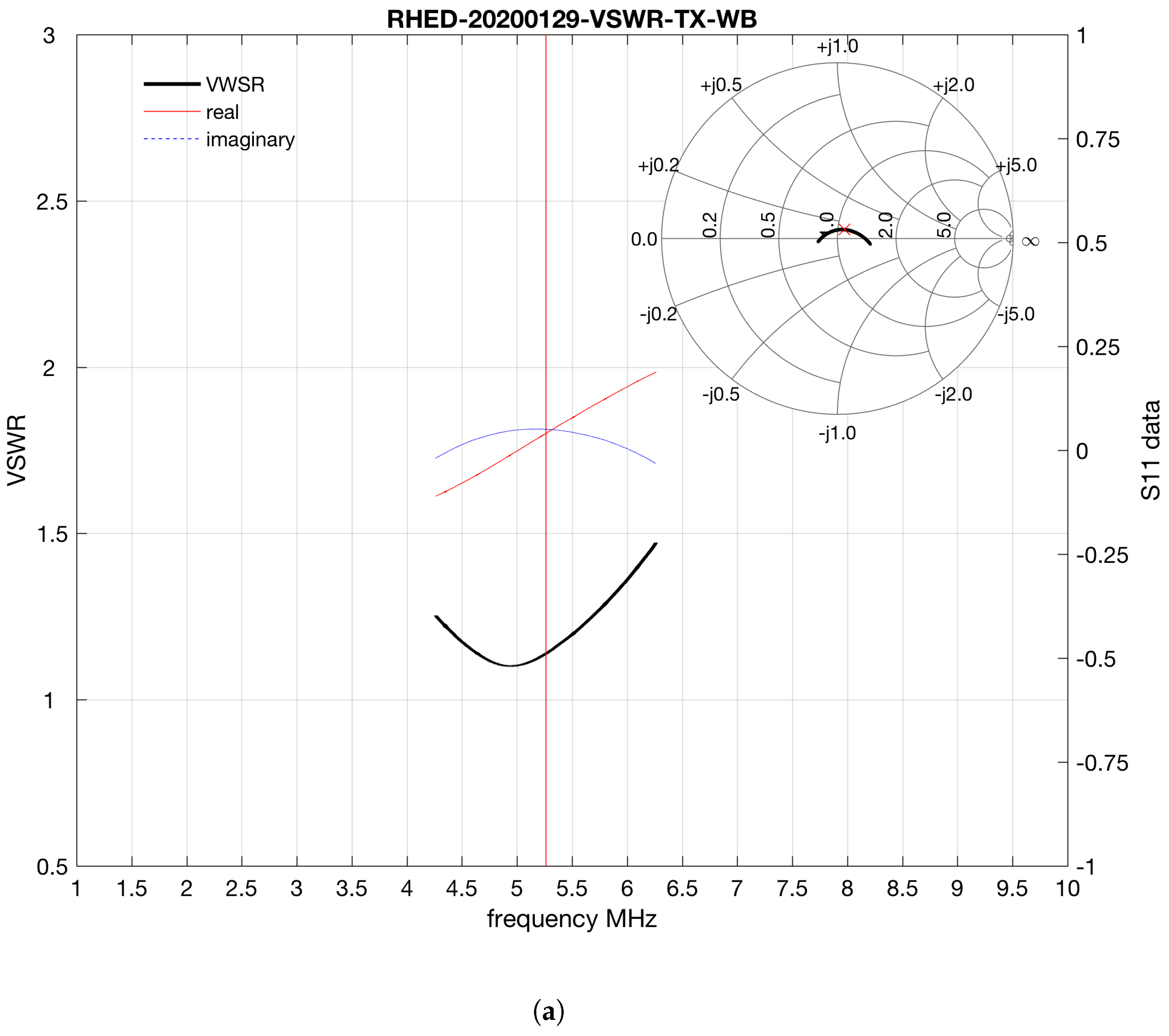
In the final installations, broadband matching of the antenna to the transmission line has then been carried out by adjusting the number of secondary turns on a custom high impedance matching unbalanced-unbalanced transformer for best Voltage Standing Wave Ratio (VSWR).
2.5. Geodetic and Plane Surveying
In combining information with Cartesian and polar model coordinates, local plane surveying data and GPS position data for signal level locations and flight path way points, it is necessary to be able to convert between Geodetic coordinates and an local Cartesian coordinate system. A most convenient local coordinate system is an East, North, Up (ENU) coordinate system centred on the antenna base where:
,
and
. This can be readily transformed into azimuth bearings for polar plots spherical coordinates three dimensional spherical plots. Model data and flight paths can be easily rotated to the correct orientation to correspond with the simulated model data and physical orientation of the antenna. Geodetic to Local and Local to Geodetic transformation routines were developed based on [
65]. Local coordinate transforms are performed with basic linear algebra.
2.6. Antenna Pattern Measurements
We used the compact, battery-powered, programmable signal source as described in [
66] attached to a commercially available programmable quad-rotor drone, to perform calibrations of the antenna beam patterns, and verify the correspondence between the modelled and measured antenna directionality and beam width. A similar approach is commonly used at HF and Ultra High Frequency (UHF) when antennas need to be tested and when large radiating structures are involved [
67]. The only detraction of this approach is that it is difficult to separate the influences of the surrounding environment from those of the antenna design.
Initial calibration trials used a centre-fed dipole antenna which had two elements, each long, constructed from 18 gauge wire. This was later replaced by a similar length dipole antenna made by splitting the shield of a pre-terminated length of RG174 coaxial cable. The signal source was then attached at the bottom of the antenna so to keep the entire length of the antenna and not just one arm under tension. The signal source produces a signals over a range of user-selectable frequencies in the HF band.
The drone was configured to fly at different elevations and fixed distance relative to the transmit antenna. In early flight plan way points were generated semi manually using the standard flight software supplied with the drone. Vertical profiles were also collected at selected bearing angles in an attempt to determine and quantify a possible enhancement effect of the cliffs and determine the vertical angle of maximum radiation. To gain more precise control, way point assignment has been undertaken using ENU coordinates and translated to geodetic coordinates. This is particularly of use when it is desired to fly vertical paths at specific azimuth angles either side of the antenna boresight.
Signal strength data as measured by the directional antenna were collected using a FieldFox hand-held RF vector network analyser operated in spectrum analyser mode. Three methods have been used to collect time synchronised signal level data:
Complete spectra were recorded via the Field Fox LAN interface.
Internal Recording of Real Time Spectra data with a FieldFox operating in Real Time Spectrum Analyser (RTSA) mode. Synchronisation was maintained with the Field Fox’s internal GPS clock.
Reading the Field Fox marker values at the signal frequency and at an offset frequency to estimate the noise floor. Time is logged immediately before and after the scan and then the marker values are read.
When meteorological conditions were prohibitive (due for instance to strong wind conditions) and there was enough clear space around the antenna, walking patterns were performed with an hand-held GPS to record positions of the signal source around the antenna. Alternatively, the TWLA front-to-back ratio was quantified by collecting single scans at the expected antenna’s front and back lobe’s positions.
Signal data are assigned an interpolated ENU position corresponding to the time of the recorded spectrum data in order to derive the antenna beam pattern in a post-processing mode. ENU coordinated signal data positions are then translated into the Near and Far-Field modelling coordinate frames in order to obtain predicted signal levels for each location attributed to a measured signal level and provide the comparison between modelled and measured data.
Time synchronisation is critical as it is the only link between the signal data and the logged GPS flight data giving its position. Synchronisation is best achieved via GPS clock or Network Time Protocol (NTP). Timing errors may lead to an offset between the real position of the recorded signal and its attributed position. For this reason, and in analogy with the conventional approach used for the antenna pattern measurement in a SeaSonde HFR system, wherever possible the flight path was flown both clockwise and anticlockwise. This allows identification and estimation of synchronisation and potentially other errors caused by lagging of logged data or velocity dependent offsets and any other similar variations.
For the SeaSonde systems deployed in NSW, the signal source was set as closely as possible to the band centre frequency of
(typically
). For initial field and site testing carried out in Western Australia the source frequency was set to
, the centre of the ITU
band currently used by these systems (
Table 1). Reference noise floor data was collected at a frequency offset from the peak but within the ITU designated band. Signal to noise ratios are largely irrelevant to the actual drone pattern determination. However, they are most useful as an indications of when signal data may be invalid due to high noise levels, caused for instance by broadband or impulse interference noise during calibrations.
2.7. Field Test and Site Trials
For initial testing, a standard long-range SeaSonde antenna, including the stainless steel ground radials, was set up at the University of Western Australia’s field station in Shenton Park.
A prototype of the electrically small VHR design was also built for testing following the preliminary modelling. This design was supported from a guy wire of the standard SeaSonde antenna, the idea being to be able to easily alternate between the two for test and reference measurements.
The two antenna elements in the VHR prototype were made with
PVC insulated copper wire. The upper wire element was supported at its mid point from one of the SeaSonde antenna guy wires to form the apex of the prototype antenna. The remaining wire element was then stretched below to form the base of the triangular loop. A custom 8:1 balanced-unbalanced transformer feeding a commercial
test load was used for termination of the resulting wire loop. As well as being convenient this allows access for measurement of the power reaching and hence being dissipated in the test load. A portable MFJ tuner [
68] was then used to match the antenna to a feed line at the
test frequency. The antenna was connected to a FieldFox operated in spectrum analyser mode, and spectrum traces were streamed to a personal PC through the available Ethernet port while the programmable signal source [
66] was used as reference signal to measure signal strength at the antenna’s front-back locations. A potentiometer was used to obtain the value for the termination resistor that optimised directionality and minimised the signal strength at the antenna’s desired back location.
The VHR was subsequently tested at Lancelin using the same set up, however with unsuccessful results. Following this initial site trial a more detailed “critical” view was taken of the VHR model results, which led to a significant modification of the antenna design.
A new site trial was performed at Lancelin in December 2018 when the TWLA prototype antenna was connected to the SeaSonde transmitter (
Figure 2). Rather than modify the SeaSonde antenna for this one off test we included an extra vertical wire, since modelling suggested a negligible effect from the SeaSonde vertical element with the loading coil on the TWLA prototype. Two PVC coated copper wires were therefore supported from the top of the existing SeaSonde antenna both electrically connected to the top hat. One wire was extended down the outside of the mast to about
from ground. The second wire was drawn to the rear of the antenna and secured with a rope to a peg. A base wire was stretched from the base of the SeaSonde mast also to the rear of the antenna. The two free wire ends were fitted into a connector to allow easy changeover between a high power termination load for transmission tests and a potentiometer for receive tuning tests.
Termination was by way of a 1:8 balanced-unbalanced transformer feeding a 50 Ohm unbalanced commercial test load (
Figure 2c). A similar connector was used at the feedpoint (
Figure 2b) to allow connection of the feedpoint matching unbalanced-unbalanced transformer. Feed-point matching was achieved by adding turns to the transformer while VSWR reduced and minimum VSWR was reached. Once adding a further turn caused VSWR to increase, the additional turn was removed and the tuning deemed complete.
In this test, bandwidth was set to consistently with the routine operational settings at the site, while software attenuation was gradually adjusted from 15 dB to 3 dB until Bragg signal could be detected in the data. This strategy was adopted in order to protect the transmitter final output amplifier from excessive reflected power in event of an unexpected fault resulting in antenna mismatch. The directive antenna was left in operations for a few hours, during which integration time was set to 15 min and left unchanged. This was necessary so to ensure reproducibility and consistency of Doppler resolution with data subsequently collected using the standard omnidirectional SeaSonde transmitter antenna configuration.
2.8. Site Deployments
Red Head Point is located in a natural reserve area approximately 100 km to the North of Sydney. The receive and transmit antennas are installed in a relatively flat, small and partial clearing close to the cliff edge. The presence of sensitive vegetation is a major operational constraint at this particular site.
A number of modifications to the TWLA were carried out for improved durability, leading to the final form of our design detailed in
Section 2.2. Prior to installation of the new TWLA we attempted to record the pattern of the unmodified antenna as well as collect reference signal data. The signal source was set to the
mid-band frequency
(
Table 1).
During the follow up visit to site the loading-coil was reinstalled and the SeaSonde transmitter pattern re-measured and reference level data collected. The directional antenna was then reinstalled and the direction adjusted by in order to bring it as close as possible to perpendicular to the baseline between the systems. Adjustment by the full was not possible due to the unfortunate position of the surrounding vegetation.
The design was modified to suit the site topography at SEAL which is located on a small flat area at the base of a steep slope overlooking a cliff. This high degree of slope in the direction of the loop necessitated raising the termination which altered the final loop shape.
Where possible the opportunity to repeat and improve APM has been undertaken during subsequent sites visits. Attempts to repeat measurements at SEAL, however, have been frustrated by weather, equipment malfunction and a short drone flight operational window which does not allow for correction of any but the most minor of difficulties. VSWR data were collected at our most recent visit.
4. Discussion
Simulations with the NEC-2 [
58,
59,
60,
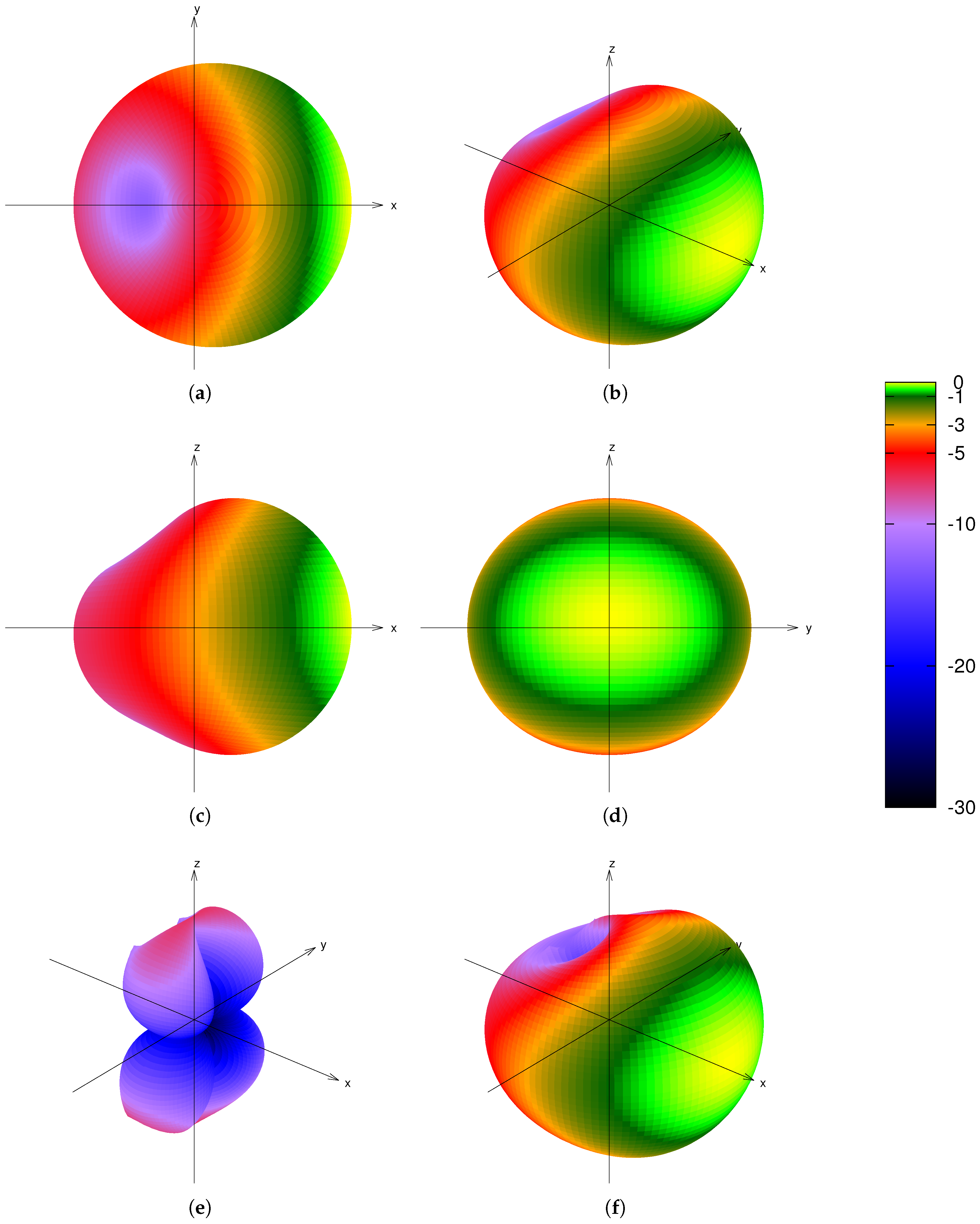
61] software demonstrate that the TWLA design combines the desired characteristics of broad beam directivity, with predominantly vertical polarization and the required level of compactness. There are strong similarities between patterns shown in
Figure 4,
Figure 5 and
Figure 6, indicating an independence of the precise antenna geometry. This suggests some flexibility in the final design and that the antenna may be easily adapted to varying environmental constraints without significantly altering its characteristics directionality.
The final model results for the VHR prototype are interesting as they show an upward direction of the main lobe which would have resulted in a further reduction of the radiation reaching the ocean surface beyond the already steep maximum gain. This may be an even more compelling reason for the failure of the VHR prototype to produce Bragg scattering results.
The upward direction of signal was not noticed in our initial simulations. It was masked by the use of various ground plane modelling options. These options at first appear useful but in actual fact are more applicable to sky-wave propagation thus they disguise the true direction of radiation as it leaves the antenna structure. This has the affect of rendering the radiation patterns from the VHR and two final design TWLA antennas inaccurately similar.
An additional inaccuracy is that of the flat ground plane model not representing correctly the curvature of the earth. The downward angle to the horizon is small; however, it is this downward radiation which is responsible for developing the ground wave propagation on which HFR is reliant. Any radiation above the horizontal is at its closest to the earth at the antenna base and will not interact with the surface unless reflected back to earth by the ionosphere. Ionospheric reflections are generally beyond operational range for HFR; however, in long-range systems this is not the case and such reflection often cause significant interference limiting the usable range while present.
The final design of the TWLA is composed of a triangular loop in which the SeaSonde transmit element is both part of the radiating loop and the supporting structure. The shape is easily implemented on site using the guy ropes and the existing SeaSonde mast as support structures and as part of the radiation loop, provided that the coil between the two fibreglass sections is removed to avoid undesired loading of the vertical section of the resulting loop. We acknowledge that there is considerable scope for optimisation of the triangular shape presented here and that more tests and simulations may lead to further innovation and improvement especially if considering the design afresh. In the present, however, we are satisfied with a convenient working solution resulting from a quick and straightforward modification to existing infrastructure.
Of the possible parameters controlling antenna performance for a given geometry, two were determined to be suitable for adjustment on site: the termination resistance required to maximise the front- to-back ratio, and the antenna matching to the transmission line. These parameters are largely dependent on antenna geometry and ground conditions. A simplified modelling approach may not be suited to predict their optimum values given the nature of these aspects of the installations. So far, good results have been obtained by initially installing a carbon film potentiometer (wire wound potentiometers are unsuitable due to their inductive characteristics) as the terminating resistor and adjusting it for minimum pick up of a signal source placed to the rear of the antenna. Once this value has been determined a suitable higher power, terminating load can be installed in its place.
The desired directionality and wide-beam pattern towards the ocean are consistently reproduced between the simulations and the field measurements performed with an autonomous drone and a known signal source. Repeated measurements also show that the directional pattern is in general stable and is not particularly affected by changes in environment (i.e., ground) once installed and finalised.
Efficiency is computed by the software packages as a ratio of the input power to the radiated power through the antenna, and is in general low. This is clearly seen in the simulation statistics reported in
Table 2. Compared to the conventional SeaSonde transmit antennas, modelling suggests a loss of approximately 15–
for the TWLA, and an overall antenna efficiency of around
. While there is no direct correlation between the physical dimensions of an antenna and the effective aperture and hence its efficiency, it is worth noting that increasing (doubling) the size of the prototype increased the gain by about
(a factor of 10). Such increases cannot be continued indefinitely as continuing to increase the size progressively degrades directivity as the antenna gradually transitions to the classic travelling wave/terminated long wire mode. The exact transition point has not been determined, and is likely to vary depending on individual antenna geometry. However, the transition generally occurs as the length of the loop increases to the order of
. In the case of the VHR more of the energy becomes directed at the ground at scales above not much above 2:1 of our dimensions for the
band. A larger antennas would pose increased engineering challenges in the fabrication and deployment stages. Our present design is constrained to fit with the existing installed antennas and requires minimal reconfiguration to create a working solution. The effect of increasing the size relative to wavelength can best be observed by scanning the excitation frequency over the HF spectrum while keeping the antenna dimensions constant.
We acknowledge that the TWLA is less efficient when compared to a phased-array arrangement or the conventional omnidirectional SeaSonde antenna; however, this loss is readily compensated for by the output power usually available at a HFR site, the ease of installation, reduced space requirements, and the suitable directional pattern. Rather than being a problem, the additional attenuation turns out in fact to be an advantage. Due to difficulties encountered collecting suitable data there is still a large uncertainty associated with confirming the relative gain and efficiency of the TWLA with that of the standard SeaSonde transmitting antenna. Simulation predicts something on the order of to depending on design while estimates from data collected at Lancelin indicate the difference is around . This is potentially within the uncertainty of our experiments to date. Difficult site conditions and limited testing windows have affected the quality and quantity of applicable data. Neither has it been possible to conveniently repeat before and after modification measurements to properly asses their uncertainty.
In the specific case of the NEWC installations where the systems operate at very low power, the minimum controllable output levels of the SeaSonde transmitter were already reached and no further reductions were possible via software controlled attenuation. Having attenuation in the antenna system saves adding attenuation in the feed line or modification of the transmitter power amplifier and sensing.
Qualitatively and quantitatively, there is little difference between the Doppler spectra collected during the Lancelin field trial (
Figure 7), Bragg signal strength, noise floor levels, and signal-to-noise ratio statistics for the first-order Bragg regions. These can be easily derived from the diagnostics output in the SeaSonde proprietary software. The only notable difference is the perhaps slightly higher background noise associated with (
Figure 7b) but this is not a direct result of the transmit antenna which is not a direct part of the received signal path or transmit antenna directionality. It is more likely to be natural variation in atmospheric or thermal background noise associated with the course of the day. Results from both the field trials of the prototype and the final deployment have demonstrated that operational ranges can still reach 200 km offshore at a fraction of the transmitted EIRP (<300
, when considering transmission line loss in addition to the
to
gain loss compared to the standard transmit antenna) than that which is conventionally used. Example of data (Bragg peaks and radial velocity maps) collected with low to extremely-low power in (
Figure 12 and
Figure 14) support this, along with available the radial diagnostics data output of the conventional SeaSonde HFR software (not shown here).
Additional advantages of the low transmit power are the following:
reduced interference within the ocean Bragg regions from ionospheric reflections;
reduced interference to land-based services with HFR signal falling below the typical noise floor level at some monitored sites.



















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}