OLCI A/B Tandem Phase Analysis, Part 2: Benefits of Sensors Harmonisation for Level 2 Products


Abstract
:
1. Introduction
2. OLCI Level 2 Scientific Products and Their Specifications
2.1. L2 Land Products and Their Specifications
2.2. L2 Water Products and Their Specifications
2.3. L2 Water Products System Vicarious Calibration and its Implications for Harmonisation
- OLCI-A with SVC and OLCI-B without SVC (current baselines)
- OLCI-A with SVC and OLCI-B with SVC (possible future baseline)
- OLCI-A without SVC, and radiometrically harmonised to OLCI-B, to OLCI-B without SVC (harmonised setup)
3. Datasets, Data Preparation, and Levels of Analysis
3.1. Datasets
3.2. Data Preparation and Additional L3 Composition
3.3. Levels of Analysis for the Comparisons
4. Results
- Tandem phase comparisons over the selected L2 scenes
- Tandem phase statistics over L2 and L3 products
- Drift phase comparisons from L2 products
4.1. Land Products Comparisons and Analyses
4.1.1. OGVI Tandem Data Analysis
4.1.2. OTCI Tandem Data Analysis
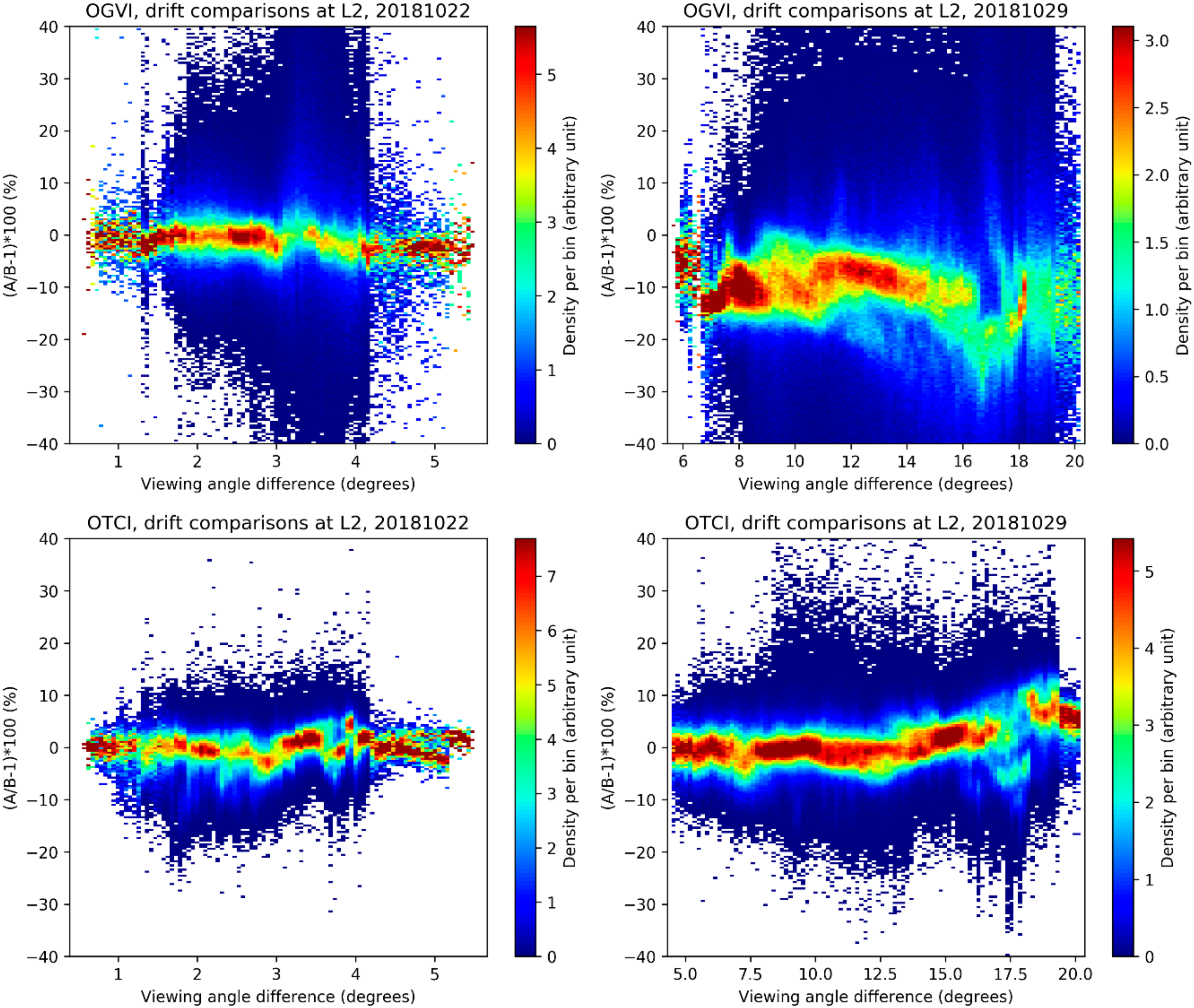
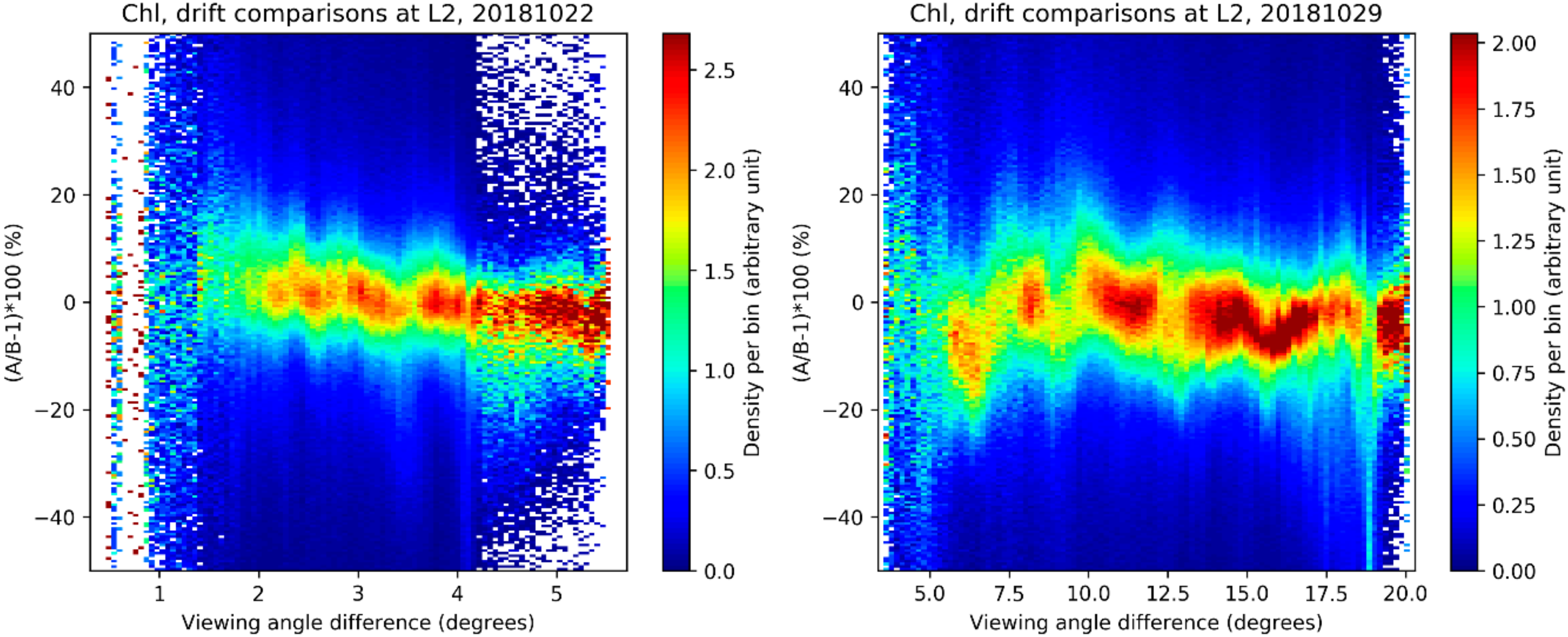
4.1.3. Drift Phase Data Analysis
4.2. Water Products Comparisons and Analyses
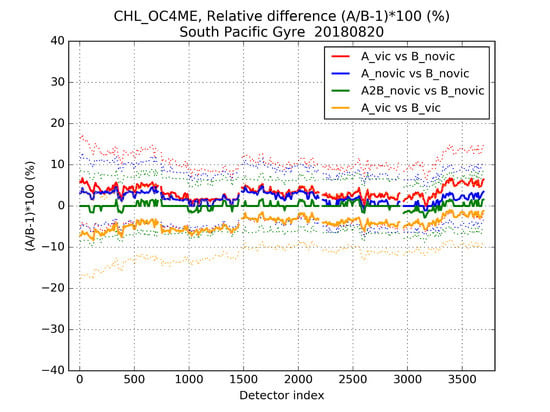
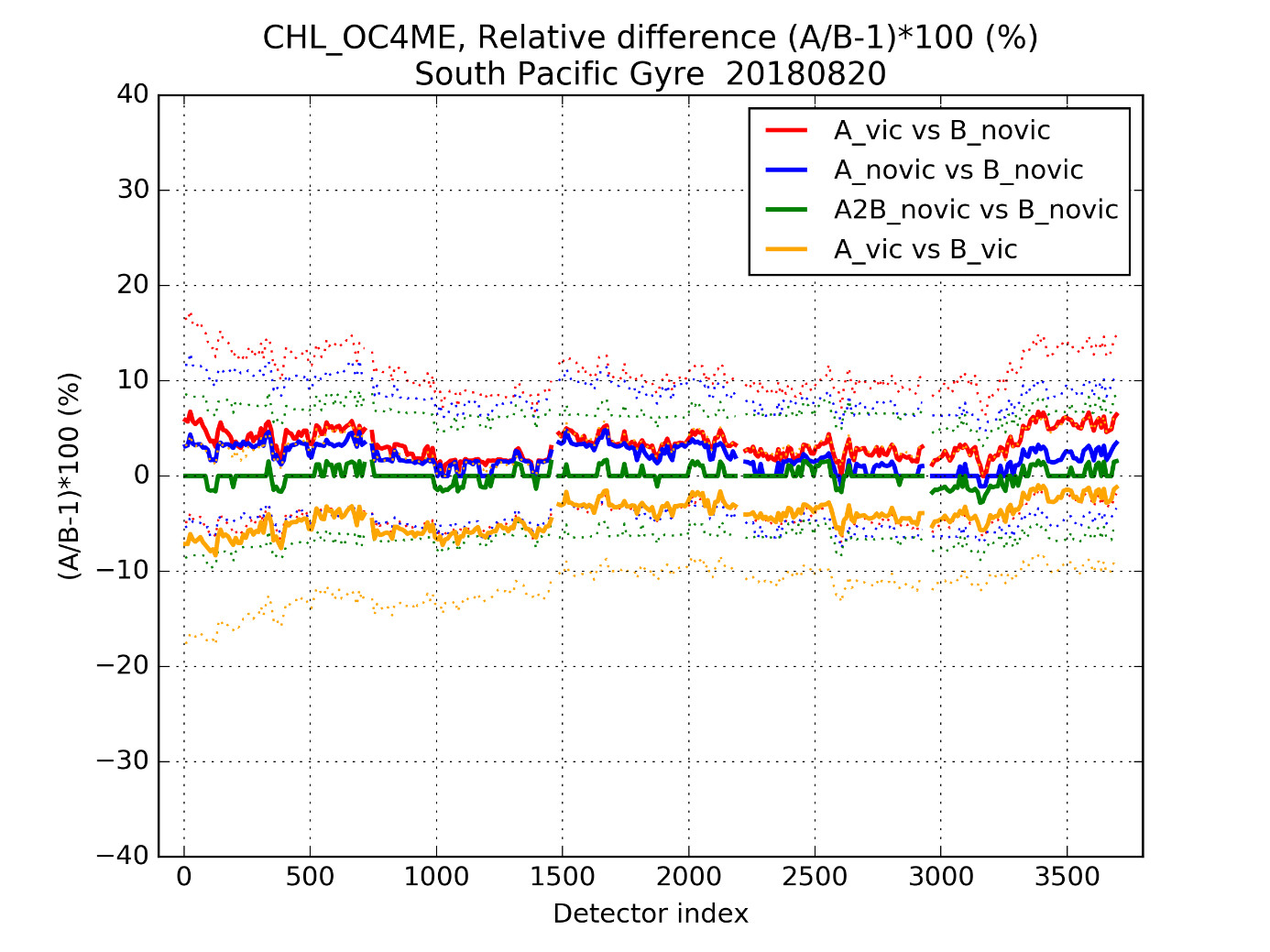
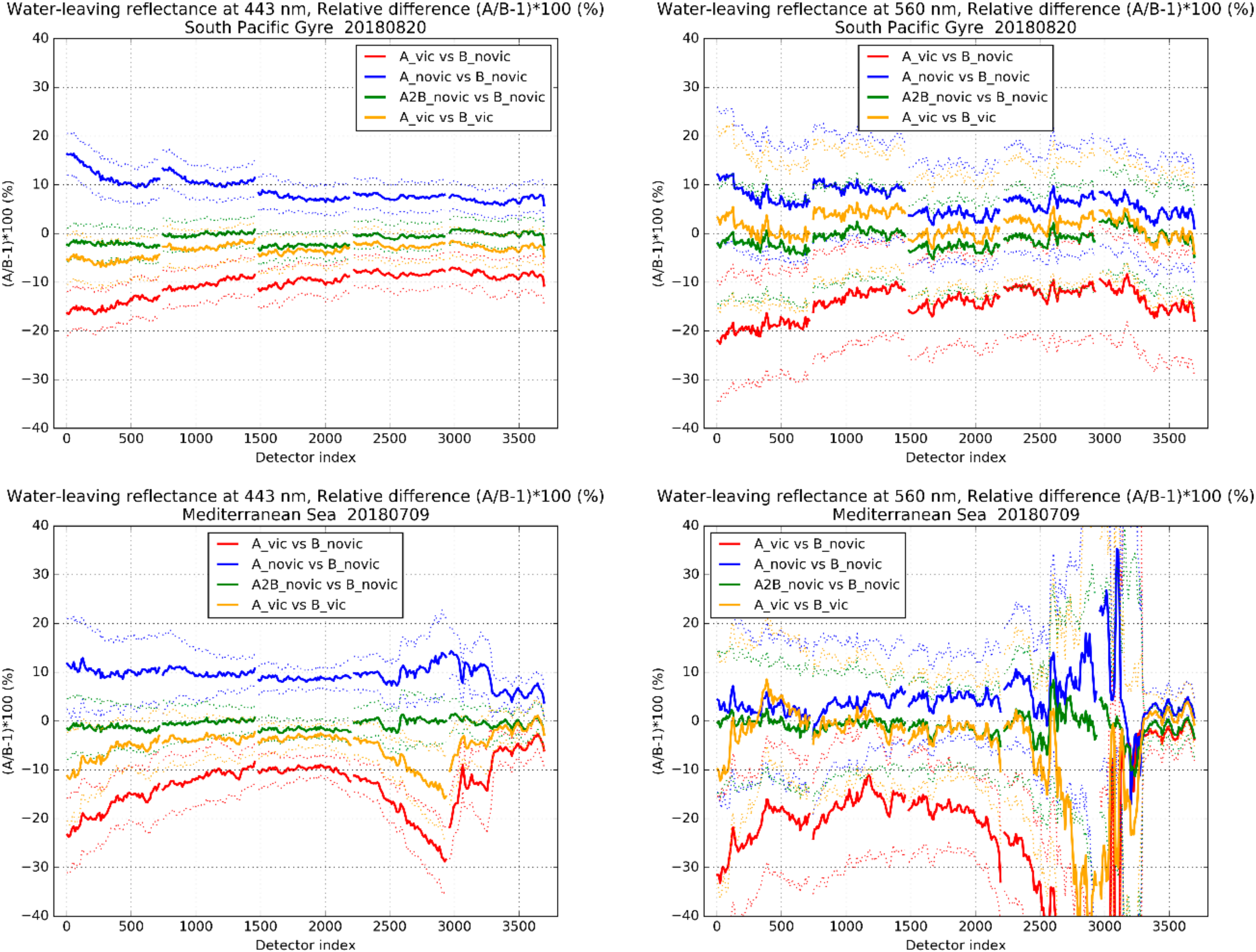
4.2.1. Tandem Data Analysis
- No SVC and no alignment to OLCI-B (“A_novic”)
- SVC and no alignment to OLCI-B (“A_vic”)
- Alignment to OLCI-B and no SVC (“A2B_novic”)
- A_novic and B_novic (blue lines) correspond to the initial response of the two sensors without any post-calibration (i.e., calibration additional to L1 calibration) applied. In the differences we see the impact of the relative higher brightness of OLCI-A compared to OLCI-B and its magnitude at BOA: 2% TOA differences translate into water-leaving reflectance differences up to about 10%. Interestingly, in cameras 1 and 2, differences, possibly accentuated by the high viewing angle, are large enough to propagate intra-camera calibration residuals (so-called “hat shapes” in [2]) which have been suspected to arise from stray light correction residuals.
- A_vic and B_novic (red lines) correspond to the current baseline with OLCI-A being adjusted through SVC. There, the initial over-brightness of OLCI-A is compensated, the effect being caused by a decrease of the OLCI-A radiometry according to SVC. We see here that this setting does not provide efficient alignment, which shows that an SVC of OLCI-B would benefit the comparison.
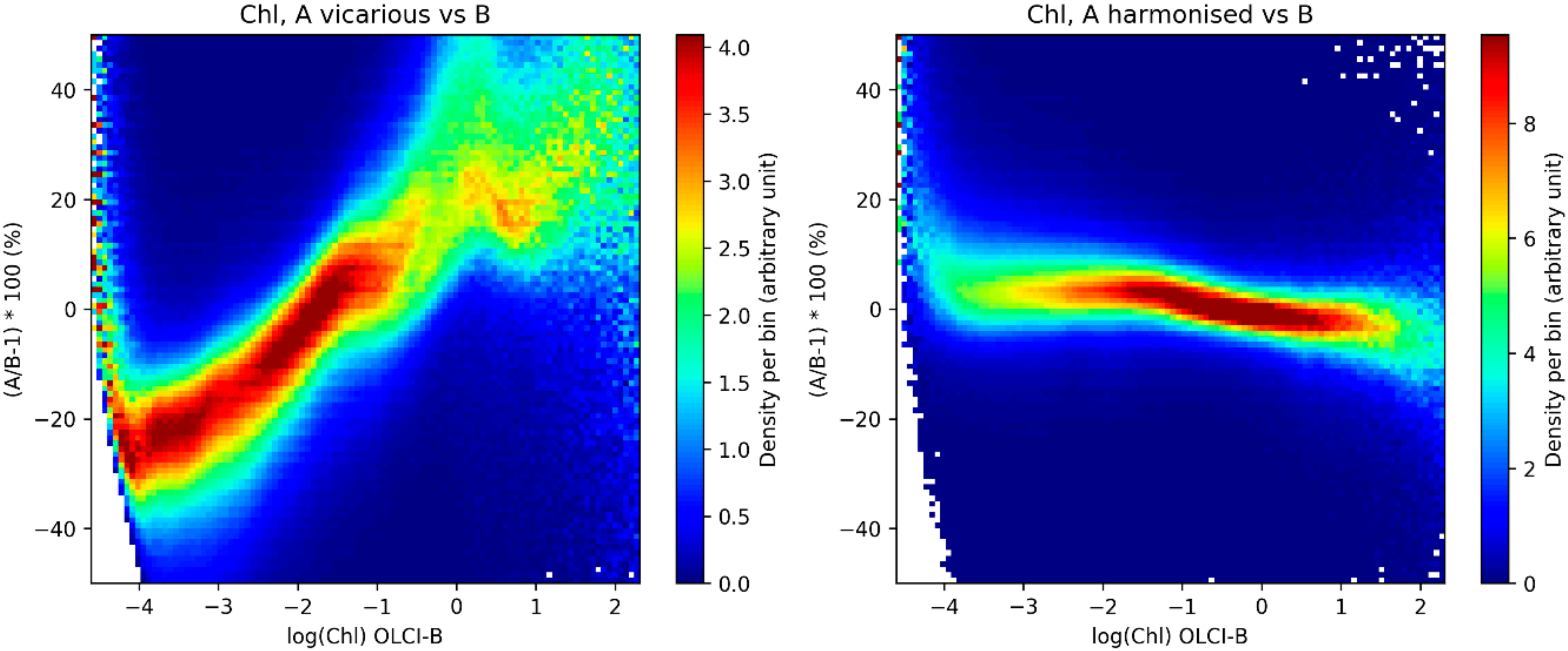
- A_vic and B_vic (yellow lines) indeed show the benefit of adjusting OLCI-B by SVC. However, the residual differences are not always centred around zero, especially for reflectance at 412 and 443 nm where specifications of 5% accuracy are not always met. Furthermore, the spectral consistency does not provide an alignment on the Chl product. Compared to SPG, the MED scenario is affected by sun-glint even though filtering has been performed.
- A2B and B_novic (green lines) now provide the best alignment, for water-leaving reflectance and for Chl, consistently with L1 harmonisation allowing OLCI-A to behave as a radiometric “copy” of OLCI-B. However, comparisons with ground-truth (not yet performed on this basis) would most probably underline the need of performing SVC on this harmonised dataset.
4.2.2. Drift Phase Data Analysis
5. Discussion: The Question of the Reference Sensor and the Potential Benefits of Flat-Fielding for L2 Products
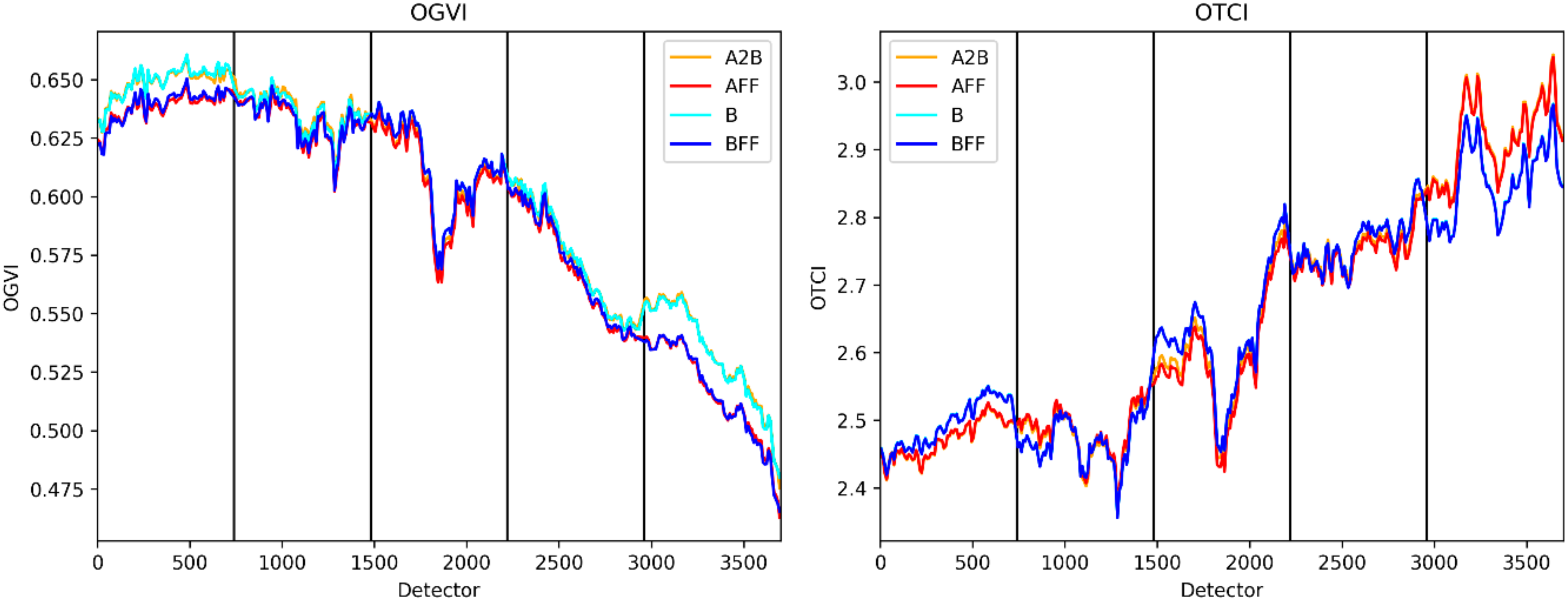
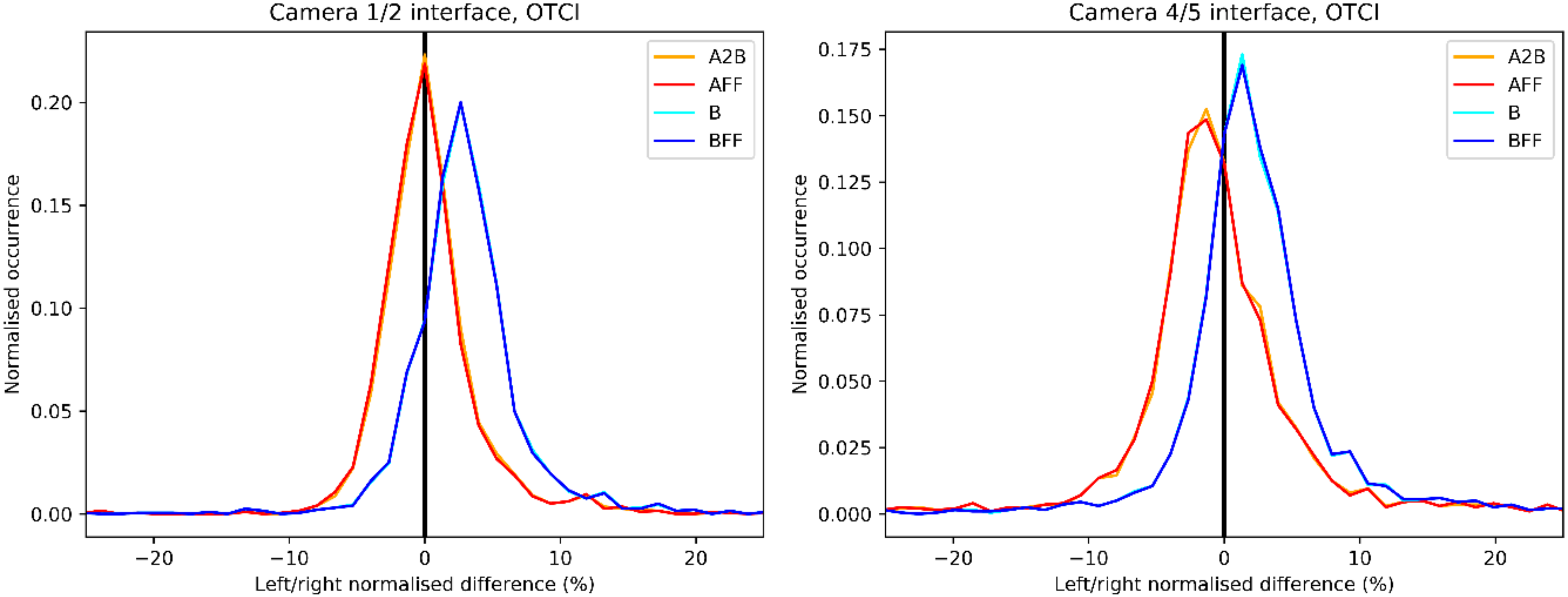
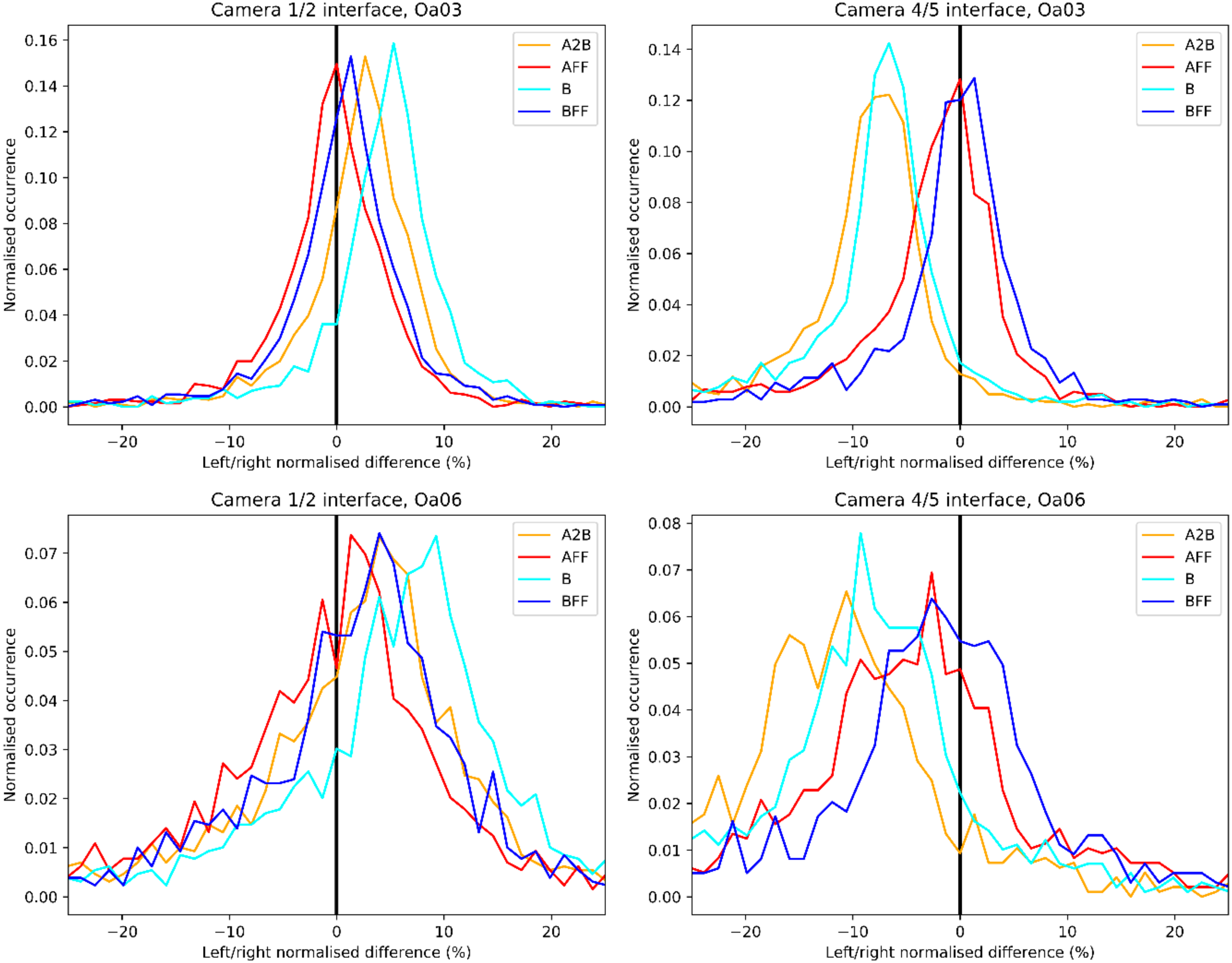
- OLCI-A harmonised to OLCI-B (“A2B”), as from the harmonised dataset
- OLCI-B (“B”), still taken as reference to “A2B”
- OLCI-A flat-fielded and harmonised to OLCI-B (flat-fielded as well) using the linear regression (“AFF”)
- OLCI-B flat-fielded (“BFF”) now taken as reference to “AFF”
5.1. Benefits of Flat-Fielding for Land Products
5.2. Benefits of Flat-Fielding for Water Products
5.3. Conclusion of the Discussion
6. Conclusions and Way Forward
Supplementary Materials
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
Abbreviations
| A_novic | OLCI-A not vicariously adjusted |
| A_vic | OLCI-A vicariously adjusted |
| A2B | OLCI-A harmonised to OLCI-B |
| A2B_novic | OLCI-A harmonised to OLCI-B and not vicariously adjusted (for OC) |
| ACT | Across-Track |
| AFF | OLCI-A flat-fielded and harmonised to OLCI-B (Flat-Fielded as well) |
| ALT | Along-track |
| AMZ | Amazonia scene |
| B_novic | OLCI-B not vicariously adjusted (for OC) |
| B_vic | OLCI-B vicariously adjusted (for OC) |
| BFF | OLCI-B Flat-Fielded |
| BOA | Bottom of atmosphere |
| BOUSSOLE | BOUée pour l’acquiSition d’une Série Optique à Long termE |
| BRDF | Bidirectional reflectance distribution function |
| Chl | Chlorophyll |
| CMEMS | Copernicus Marine Environmental Monitoring Service |
| CSC | Copernicus Space Component |
| ECV | Essential climate variable |
| EEA | European Environment Agency |
| ENVISAT | ENVIronment SATellite |
| ERS | European Remote-Sensing satellite |
| ESA | European Space Agency |
| EUMETSAT | European Organisation for the Exploitation of Meteorological Satellites |
| EUR | Europe scene |
| FAPAR | Fraction of absorbed photosynthetically active aadiation |
| FLEX | Fluorescence explorer |
| FOV | Field-of-view |
| FR | Full resolution |
| GCOS | Global Climate Observation System |
| L1 | Level 1 |
| L2 | Level 2 |
| L3 | Level 3 |
| MED | Mediterranean Sea scene |
| MERIS | MEdium Resolution Imaging Spectrometer |
| MGVI | MERIS global vegetation index |
| MOBY | Marine Optical BuoY |
| MODIS | Moderate resolution imaging spectroradiometer |
| MTCI | MERIS terrestrial chlorophyll index |
| MWR | Microwave radiometer |
| NIR | Near-infrared |
| OC | Ocean colour |
| OGVI | OLCI global vegetation index |
| OLCI | Ocean and Land Colour Instrument |
| OTCI | OLCI terrestrial chlorophyll index |
| PDGS | Payload Data Ground Segment |
| PROBA | Project for On-Board Autonomy |
| RGB | Red-green-blue image |
| RR | Reduced resolution |
| S3-MPC | Sentinel-3 Mission Performance Centre |
| S3TC | Sentinel-3 Tandem for Climate |
| SAR | Synthetic aperture radar |
| Sentinel-2 MSI | Sentinel-2 Multispectral Instrument |
| SLSTR | Sea and land Surface Temperature Radiometer |
| SPG | South Pacific Gyre scene |
| SPOT | Satellite pour l’observation de la Terre |
| SVC | System vicarious calibration |
| SWIR | Short wave infrared |
| TOA | Top of atmosphere |
| VIIRS | Visible Infrared Imaging Radiometer Suite |
| VIS | Visible |
| VNIR | Visible and near-infrared |
References
- Donlon, C.; Berruti, B.; Buongiorno, A.; Ferreira, M.-H.; Féménias, P.; Frerick, J.; Goryl, P.; Klein, U.; Laur, H.; Mavrocordatos, C.; et al. The Global Monitoring for Environment and Security (GMES) Sentinel-3 mission. Remote Sens. Environ. 2012, 120, 37–57, ISSN 0034-4257. [Google Scholar] [CrossRef]
- Lamquin, N.; Clerc, S.; Bourg, L.; Donlon, C. OLCI A/B Tandem Phase Analysis, Part 1: Level 1 Homogenisation and Harmonisation. Remote Sens. 2020, 12, 1804. [Google Scholar] [CrossRef]
- Garnesson, P.; Mangin, A.; Fanton d’Andon, O.; Demaria, J.; Bretagnon, M. The CMEMS GlobColour Chlorophyll-a Product Based on Satellite Observation. Ocean Sci. Discuss. 2019, 1–16. [Google Scholar] [CrossRef]
- Nieke, J.; Borde, F.; Mavrocordatos, C.; Berruti, B.; Delclaud, Y.; Riti, J.-B.; Garnier, T. The Ocean and Land Colour Imager (OLCI) for the Sentinel 3 GMES Mission: Status and first test results. In Proceedings of the SPIE 8528, Earth Observing Missions and Sensors: Development, Implementation, and Characterization II, 85280C, Kyoto, Japan, 28 November 2012. [Google Scholar] [CrossRef]
- EUMETSAT. Sentinel-3 OLCI Marine User Handbook; EUM/OPS-SEN3/MAN/17/907205; EUMETSAT: Darmstadt, Geramny, 2018. [Google Scholar]
- Gobron, N.; Pinty, B.; Verstraete, M.; Govaerts, Y. The MERIS global vegetation index (MGVI): Description and preliminary application. Int. J. Remote Sens. 1999, 20, 1917–1927. [Google Scholar] [CrossRef]
- Dash, J.; Curran, P.J. The MERIS terrestrial chlorophyll index. Int. J. Remote Sens. 2004, 25, 5403–5413. [Google Scholar] [CrossRef]
- The Global Observing System for Climate: Implementation Needs. GCOS-200, GOOS-214. 2016. Available online: https://library.wmo.int/doc_num.php?explnum_id=3417 (accessed on 30 May 2020).
- Rahman, H.; Pinty, B.; Verstraete, M.M. Coupled surface± atmosphere reflectance (CSAR) model. 2. Semiempirical surface model usable with NOAA Advanced Very High Resolution Radiometer data. J. Geophys. Res. 1993, 98, 20791–20801. [Google Scholar] [CrossRef]
- Horler, D.N.H.; Dockray, M.; Barber, J. The Red Edge of Plant Leaf Reflectance. Int. J. Remote Sens. 1983, 4, 273–288. [Google Scholar] [CrossRef]
- Drinkwater, M.R.; Rebhan, H. Sentinel-3 Mission Requirements Document. Ref: EOP-SMO/1151/MD-md. 2007. Available online: http://esamultimedia.esa.int/docs/GMES/GMES_Sentinel3_MRD_V2.0_update.pdf (accessed on 30 May 2020).
- Bézy, J.L.; Delwart, S.; Rast, M. MERIS—A new generation of ocean-colour sensor onboard Envisat. August 2000. ESA bulletin. Eur. Space Agency 2000, 103, 48–56. [Google Scholar]
- Antoine, D.; Morel, A. A multiple scattering algorithm for atmospheric correction of remotely-sensed ocean colour (MERIS instrument): Principle and implementation for atmospheres carrying various aerosols including absorbing ones. Int. J. Remote Sens. 1999, 20, 1875–1916. [Google Scholar] [CrossRef]
- Morel, A.; Gentili, B. Diffuse reflectance of oceanic waters. II Bidirectional aspects. Appl Opt. 1993, 32, 6864–6879. [Google Scholar] [CrossRef] [PubMed]
- Antoine, D. OLCI Level 2 Algorithm Theoretical Basis Document: Ocean Colour Products in Case 1 Waters; Ref S3-L2-SD-03-C10-LOVATBD. 2010. Available online: https://www.eumetsat.int/website/home/Satellites/CurrentSatellites/Sentinel3/OceanColourServices/index.html (accessed on 30 May 2020).
- Morel, A.; Huot, Y.; Gentili, B.; Werdell, P.J.; Hooker, S.B.; Franz, B.A. Examining the consistency of products derived from various ocean color sensors in open ocean (Case 1) waters in the perspective of a multi-sensor approach. Remote Sens. Environ. 2007, 111, 69–88. [Google Scholar] [CrossRef]
- IOCCG. Uncertainties in Ocean Colour Remote Sensing; Mélin, F., Ed.; IOCCG Report Series, No. 18; International Ocean Colour Coordinating Group: Dartmouth, NS, Canada, 2019. [Google Scholar] [CrossRef]
- Hammond, M.L.; Henson, S.A.; Lamquin, N.; Clerc, S.; Donlon, C. Assessing the effect of Tandem Phase Sentinel 3 OLCI sensor uncertainty on the estimation of potential ocean chlorophyll trends. Remote Sens. 2020, 12, 2522. [Google Scholar] [CrossRef]
- Brown, S.W.; Flora, S.J.; Feinholz, M.E.; Yarbrough, M.A.; Houlihan, T.; Peters, D.; Kim, Y.S.; Mueller, J.; Johnson, B.C.; Clark, D.K. The marine optical buoy (MOBY) radiometric calibration and uncertainty budget for ocean colour satellite sensor vicarious calibration. In Proceedings of the SPIE on Optics & Photonics, Sensors, Systems, and Next-Generation Satellites XI, Florence, Italy, 17–20 September 2007. [Google Scholar]
- Antoine, D.; Guevel, P.; Deste, J.F.; Bécu, G.; Louis, F.; Scott, A.J.; Bardey, P. The BOUSSOLE buoy-a new transparent-to-swell taut mooring dedicated to marine optics: Design, tests, and performance at sea. J. Atmos. Ocean. Technol. 2008, 25, 968–989. [Google Scholar] [CrossRef]
- Gordon, H.R. Calibration requirements and methodology for remote sensors viewing the ocean in the visible. Remote Sens. Environ. 1987, 22, 103–126. [Google Scholar] [CrossRef]
- Franz, B.A.; Bailey, S.W.; Werdell, P.J.; McClain, C.R. Sensor-independent approach to the vicarious calibration of satellite ocean color radiometry. Appl. Opt. 2007, 46, 5068–5082. [Google Scholar] [CrossRef] [PubMed]
- Lamquin, N.; Bourg, L.; Lerebourg, C.; Martin-Lauzer, F.-R.; Kwiatkowska, E.; Dransfeld, S. System Vicarious Calibration of Sentinel-3 OLCI. In Proceedings of the Calibration Conference (CALCON) Proceedings, Logan, Utah, 23 August 2017. [Google Scholar]
- Lerebourg, C.; Mazeran, C.; Huot, J.P.; Antoine, D. Vicarious Adjustment of the MERIS Ocean Colour Radiometry; ESA/ESRIN MERIS ATBD-2.24 Issue 1.0; ESA: Frascati, Italy, 2011. [Google Scholar]
- Bourg, L.; Blanot, L.; Alhammoud, B.; Sterck, S.; Preusker, R. Sentinel-3 A and B OLCI instruments Calibration Status. In Proceedings of the Fifth Sentinel-3 Validation Team Meeting, Frascati, Italy, 7–9 May 2019. [Google Scholar]
- Clerc, S.; Donlon, C.; Borde, F.; Lamquin, N.; Hunt, S.E.; Smith, D.; McMillan, M.; Mittaz, J.; Woolliams, E.; Hammond, M.; et al. Benefits and Lessons Learned from the Sentinel-3 Tandem Phase. Remote Sens. 2020, 12, 2668. [Google Scholar] [CrossRef]
- Fischer, J.; Preusker, R.; Lindstrot, R. Sentinel-3 OLCI Gaseous Correction Algorithm Theoretical Baseline Document. Ref SE-l2-SD-03-C03-FUB-ATBD_GaseousCorrection. 2010. Available online: https://sentinel.esa.int/documents/247904/349589/OLCI_L2_ATBD_Gaseous_Correction.pdf (accessed on 30 May 2020).
- Meerdink, S.K.; Hook, S.J.; Roberts, D.A.; Abbott, E.A. The ECOSTRESS spectral library version 1.0. Remote Sens. Environ. 2019, 230, 1–8. [Google Scholar] [CrossRef]
- Baldridge, A.M.; Hook, S.J.; Grove, C.I.; Rivera, G. The ASTER Spectral Library Version 2.0. Remote Sens. Environ. 2009, 113, 711–715. [Google Scholar] [CrossRef]
- Frampton, W.J.; Dash, J.; Watmough, G.; Milton, E.J. Evaluating the capabilities of Sentinel-2 for quantitative estimation of biophysical variables in vegetation. ISPRS J. Photogramm. Remote Sens. 2013, 82, 83–92. [Google Scholar] [CrossRef] [Green Version]
- Drusch, M.; Moreno, J.; Del Bello, U.; Franco, R.; Goulas, Y.; Huth, A.; Kraft, S.; Middleton, E.M.; Miglietta, F.; Moammed, G.; et al. The FLuorescence EXplorer Mission Concept—ESA’s Earth Explorer 8. IEEE Trans. Geosci. Remote Sens. 2017, 55, 1273–1284. [Google Scholar] [CrossRef]
- Dash, J.; Vuolo, F. OLCI Terrestrial Chlorophyll Index (OTCI) Algorithm Theoretical Basis Document. Ref S3-L2-SD-03-C14UoS-ATBD_OTCI. 2010. Available online: https://sentinel.esa.int/documents/247904/349589/OLCI_L2_ATBD_OLCI_Terrestrial_Chlorophyll_Index.pdf (accessed on 30 May 2020).



























{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Product Level and Type | OLCI-A « Baseline » | OLCI-A « Harmonised » | OLCI-B « Baseline » | OLCI-A/OLCI-B « Custom » |
|---|---|---|---|---|
| Temporal sampling * | Full | Reduced | Full | A few scenes |
| L1 | FR ** | FR ** | FR ** | FR ** |
|
L2 Water (w/o SVC ***) |
RR ** (SVC) |
FR ** and RR ** (no SVC) |
FR ** and RR ** (no SVC) |
FR ** (any SVC) |
| L2 Land | FR ** and RR ** | FR ** and RR ** | FR ** | |
| L2 breakpoints | FR ** | |||
| L3 Water | Daily mean | Daily mean | Daily mean | |
| L3 Land | Daily mean | Daily mean | Daily mean |
| Quantity | nRrs 400 | nRrs 412 | nRrs 443 | nRrs 490 | nRrs 510 | nRrs 560 | Chl |
|---|---|---|---|---|---|---|---|
| Mean relative difference (%) | −0.4 | −1.2 | 0.3 | 0.9 | 1.0 | 1.6 | 4.0 |
| Median relative difference (%) | −0.3 | −1.4 | -0.8 | 0.6 | 0.7 | 1.1 | 3.0 |
| Cam 1 | Cam 2 | Cam 3 | Cam 4 | Cam 5 | |
|---|---|---|---|---|---|
| OLCI-A | 0.992 | 0.997 | 1.000 | 0.998 | 0.988 |
| OLCI-B | 0.991 | 0.997 | 1.000 | 0.996 | 0.983 |
© 2020 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Lamquin, N.; Déru, A.; Clerc, S.; Bourg, L.; Donlon, C. OLCI A/B Tandem Phase Analysis, Part 2: Benefits of Sensors Harmonisation for Level 2 Products. Remote Sens. 2020, 12, 2702. https://doi.org/10.3390/rs12172702
Lamquin N, Déru A, Clerc S, Bourg L, Donlon C. OLCI A/B Tandem Phase Analysis, Part 2: Benefits of Sensors Harmonisation for Level 2 Products. Remote Sensing. 2020; 12(17):2702. https://doi.org/10.3390/rs12172702
Chicago/Turabian StyleLamquin, Nicolas, Alexis Déru, Sébastien Clerc, Ludovic Bourg, and Craig Donlon. 2020. "OLCI A/B Tandem Phase Analysis, Part 2: Benefits of Sensors Harmonisation for Level 2 Products" Remote Sensing 12, no. 17: 2702. https://doi.org/10.3390/rs12172702