The Implications of M3C2 Projection Diameter on 3D Semi-Automated Rockfall Extraction from Sequential Terrestrial Laser Scanning Point Clouds


Abstract
:
1. Introduction
1.1. Rockfall Hazard in Mountainous Terrain
1.2. Terrestrial Laser Scanning for Rockfall Monitoring
1.3. Recent Developments for Rockfall Monitoring Using Laser Scanning
1.4. Methods of Change Detection
1.5. Multiscale Model-to-Model Cloud Comparison (M3C2)
1.6. Study Objectives
- An overview of a five-year TLS monitoring campaign for an active rock slope along the Fraser River, in the interior of British Columbia, Canada;
- The full presentation of the semi-automated workflow used in this work for extracting rockfall and computing 3D volume and shape;
- The creation of six different rockfall inventories using different M3C2 projection diameters ranging from two times the average point spacing to ten times the average point spacing;
- An analysis of the impact that the M3C2 projection diameter has on automated rockfall extraction;
- A discussion on the considerations that should be made when selecting appropriate M3C2 parameters for future work;
- Recommendations for improvements on automated rockfall extraction.
1.7. Study Site
2. Materials and Methods
2.1. Data Collection
2.1.1. Terrestrial Laser Scanning
2.1.2. High-Resolution Panoramic Photography
2.1.3. Oblique Helicopter Photogrammetry
2.2. Rockfall Extraction and Database Aggregation
2.2.1. M3C2 Batch Change Detection
2.2.2. Extraction of 3D Loss Objects
2.2.3. Classification of Rockfall and Removal of Clutter and Artifacts
2.2.4. Clustering Individual Rockfalls
2.2.5. Volume Calculations
2.2.6. Shape Calculation
2.2.7. Lithology Classification
2.2.8. Filtering
3. Results
4. Discussion
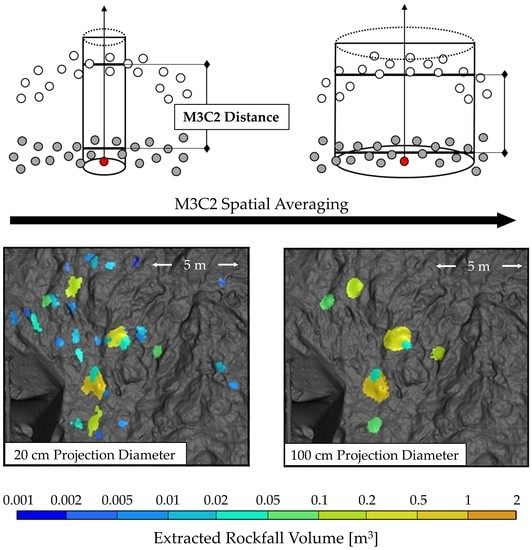
- Smaller projection diameters result in more detailed change objects delineated. More rockfalls can be captured and extracted, at the cost of accepting more random noise in the computed distances.
- A projection diameter which is large in comparison to the footprint of a rockfall reduces the likelihood that the rockfall can be extracted. Spatial averaging causes the changing feature’s outer boundary M3C2 distances to fall beneath the LoD95. This ultimately reduces the likelihood that the rockfall’s extracted points meet the density-based cluster criteria.
- Missed lower magnitude events inhibit our ability to identify and document precursor rockfall activity observed prior to the occurrence of larger magnitude rockfalls.
- An increased projection diameter results in the average shape of rockfalls in sedimentary sequences to become more platy.
- Spatial averaging causing an expansion of a rockfall feature footprint can challenge clustering algorithms in cases where multiple discrete events have occurred in close proximity.
- Point spacing;
- Complexity and roughness of the terrain (generates more noise);
- Quality of data (precision, accuracy, atmospheric conditions, human processing error);
- Importance of preserving rockfall geometry;
- Effectiveness of noise removal by the combined effort of filtering and clustering algorithms;
- The minimum rockfall volume that is of interest for the particular rockfall inventory/study.
5. Conclusions
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
References
- Hungr, O.; Leroueil, S.; Picarelli, L.; Article, R. The Varnes Classification of Landslide Types, an Update. Landslides 2014, 11, 167–194. [Google Scholar] [CrossRef]
- Volkwein, A.; Schellenberg, K.; Labiouse, V.; Agliardi, F.; Berger, F.; Bourrier, F.; Dorren, L.K.A.; Gerber, W. Rockfall Characterisation and Structural Protection—A Review. Nat. Hazards Earth Syst. Sci. 2011, 2617–2651. [Google Scholar] [CrossRef] [Green Version]
- Hungr, O.; Evans, S.G.; Hazzard, J. Magnitude and Frequency of Rock Falls and Rock Slides along the Main Transportation Corridors of Southwestern British Columbia. Can. Geotech. J. 1999, 36, 224–238. [Google Scholar] [CrossRef]
- Government of Canada. Transportation in Canada. Available online: https://www.tc.gc.ca/eng/policy/anre-menu-3041.htm (accessed on 4 June 2020).
- Guzzetti, F.; Reichenbach, P.; Ghigi, S. Rockfall Hazard and Risk Assessment Along a Transportation Corridor in the Nera Valley, Central Italy. Environ. Manag. 2004, 34, 191–208. [Google Scholar] [CrossRef] [PubMed]
- Corominas, J.; Moya, J. A Review of Assessing Landslide Frequency for Hazard Zoning Purposes. Eng. Geol. 2008, 102, 193–213. [Google Scholar] [CrossRef]
- Lemmens, M. Geo-Information—Technologies, Applications and the Environment. In Technologies, Applications and the Environment; Gatrell, J., Jensen, R., Eds.; Springer: Dordrecht, The Netherlands, 2011. [Google Scholar]
- Telling, J.; Lyda, A.; Hartzell, P.; Glennie, C. Review of Earth Science Research Using Terrestrial Laser Scanning. Earth-Science Rev. 2017, 169, 35–68. [Google Scholar] [CrossRef] [Green Version]
- Abellán, A.; Oppikofer, T.; Jaboyedoff, M.; Rosser, N.J.; Lim, M.; Lato, M.J. Terrestrial Laser Scanning of Rock Slope Instabilities. Earth Surf. Process. Landforms 2014, 39, 80–97. [Google Scholar] [CrossRef]
- Rosser, N.; Lim, M.; Petley, D.; Dunning, S.; Allison, R. Patterns of Precursory Rockfall Prior to Slope Failure. J. Geophys. Res. 2007, 112, F04014. [Google Scholar] [CrossRef]
- Tonini, M.; Abellan, A. Rockfall Detection from Terrestrial LiDAR Point Clouds: A Clustering Approach Using R. J. Spat. Inf. Sci. 2014, 2014, 95–110. [Google Scholar] [CrossRef]
- Carrea, D.; Abellan, A.; Derron, M.; Jaboyedoff, M. Automatic Rockfalls Volume Estimation Based on Terrestrial Laser Scanning Data. In Engineering Geology for Society and Territory-Volume 2; Springer International Publishing: Cham, Switzerland, 2015; pp. 425–428. [Google Scholar] [CrossRef]
- Benjamin, J.; Rosser, N.; Brain, M. Rockfall Detection and Volumetric Characterisation Using LiDAR. In Landslides and Engineered Slopes. Experience, Theory and Practice: Proceedings of the 12th International Symposium on Landslides; CRC Press: Naples, Italy, 2016; pp. 389–395. [Google Scholar] [CrossRef]
- Van Veen, M.; Hutchinson, D.J.; Kromer, R.; Lato, M.; Edwards, T. Effects of Sampling Interval on the Frequency-Magnitude Relationship of Rockfalls Detected from Terrestrial Laser Scanning Using Semi-Automated Methods. Landslides 2017, 14, 1579–1592. [Google Scholar] [CrossRef]
- Berger, M.; Tagliasacchi, A.; Seversky, L.M.; Alliez, P.; Levine, J.A.; Sharf, A.; Silva, C.T. State of the Art in Surface Reconstruction from Point Clouds. In Eurographics 2014-State of the Art Reports; Lefebvre, S., Spagnuolo, M., Eds.; The Eurographics Association: Strasbourg, France, 2014; pp. 161–185. [Google Scholar] [CrossRef]
- Bonneau, D.; DiFrancesco, P.-M.; Hutchinson, D.J. Surface Reconstruction for Three-Dimensional Rockfall Volumetric Analysis. ISPRS Int. J. Geo-Inf. 2019, 8, 548. [Google Scholar] [CrossRef] [Green Version]
- Bonneau, D.A.; Hutchinson, D.J.; DiFrancesco, P.-M.; Coombs, M.; Sala, Z. Three-Dimensional Rockfall Shape Back Analysis: Methods and Implications. Nat. Hazards Earth Syst. Sci. 2019, 19, 2745–2765. [Google Scholar] [CrossRef] [Green Version]
- Glover, J. Rock-Shape and Its Role in Rockfall Dynamics. Ph.D. Thesis, Durham University, Durham, UK, 2015. [Google Scholar]
- Sala, Z. Game-Engined Based Rockfall Modelling: Testing and Application of a New Rockfall Simulation Tool. Master’s Thesis, Queen’s University, Kingston, ON, Canada, 2018. [Google Scholar]
- Caviezel, A.; Lu, G.; Demmel, S.E.S.; Ringenbach, A.; Bühler, Y.; Christen, M.; Bartelt, P. RAMMS: ROCKFALL—A Modern 3-Dimensional Simulation Tool Calibrated on Real World Data. In 53rd U.S. Rock Mechanics/Geomechanics Symposium; American Rock Mechanics Association: New York, NY, USA, 2019. [Google Scholar]
- Harrap, R.; Hutchinson, D.J.; Sala, Z.; Ondercin, M.; Difrancesco, P.-M. Our GIS is a Game Engine: Bringing Unity to Spatial Simulation of Rockfalls. Geomcomputation 2019. [Google Scholar] [CrossRef]
- Sala, Z.; Hutchinson, D.J.; Harrap, R. Simulation of Fragmental Rockfalls Detected Using Terrestrial Laser Scans from Rock Slopes in South-Central British Columbia, Canada. Nat. Hazards Earth Syst. Sci. 2019, 19, 2385–2404. [Google Scholar] [CrossRef] [Green Version]
- Olsen, M.J.; Wartman, J.; McAlister, M.; Mahmoudabadi, H.; O’Banion, M.; Dunham, L.; Cunningham, K.; Banion, M.S.O.; Dunham, L.; Cunningham, K. To Fill or Not to Fill: Sensitivity Analysis of the Influence of Resolution and Hole Filling on Point Cloud Surface Modeling and Individual Rockfall Event Detection. Remote Sens. 2015, 7, 12103–12134. [Google Scholar] [CrossRef] [Green Version]
- Williams, J.G.; Rosser, N.J.; Hardy, R.J.; Brain, M.J.; Afana, A.A. Optimising 4-D Surface Change Detection: An Approach for Capturing Rockfall Magnitude-Frequency. Earth Surf. Dyn. 2018, 6, 101–119. [Google Scholar] [CrossRef] [Green Version]
- Benjamin, J. Regional-Scale Controls on Rockfall Occurrence. Ph.D. Thesis, Durham University, Durham, UK, 2018. [Google Scholar]
- Kromer, R.A.; Abellán, A.; Hutchinson, D.J.; Lato, M.; Edwards, T.; Jaboyedoff, M. A 4D Filtering and Calibration Technique for Small-Scale Point Cloud Change Detection with a Terrestrial Laser Scanner. Remote Sens. 2015, 7, 13029–13058. [Google Scholar] [CrossRef] [Green Version]
- Kromer, R.A.; Abellán, A.; Hutchinson, D.J.; Lato, M.; Chanut, M.A.; Dubois, L.; Jaboyedoff, M. Automated Terrestrial Laser Scanning with Near-Real-Time Change Detection-Monitoring of the Séchilienne Landslide. Earth Surf. Dyn. 2017, 5, 293–310. [Google Scholar] [CrossRef] [Green Version]
- Williams, J.G. Insights into Rockfall from Constant 4D Monitoring. Ph.D. Thesis, Durham theses, Durham University, Durham, UK, 2017. [Google Scholar]
- Williams, J.G.; Rosser, N.J.; Hardy, R.J.; Brain, M.J. The Importance of Monitoring Interval for Rockfall Magnitude-Frequency Estimation. J. Geophys. Res. Earth Surf. 2019, 124, 2841–2853. [Google Scholar] [CrossRef] [Green Version]
- Abellán, A.; Jaboyedoff, M.; Oppikofer, T.; Vilaplana, J.M. Detection of Millimetric Deformation Using a Terrestrial Laser Scanner: Experiment and Application to a Rockfall Event. Nat. Hazards Earth Syst. Sci. 2009, 9, 365–372. [Google Scholar] [CrossRef] [Green Version]
- Wheaton, J.M.; Brasington, J.; Darby, S.E.; Sear, D.A. Accounting for Uncertainty in DEMs from Repeat Topographic Surveys: Improved Sediment Budgets. Earth Surf. Process. Landforms 2010, 35, 136–156. [Google Scholar] [CrossRef]
- Barnhart, T.B.; Crosby, B.T. Comparing Two Methods of Surface Change Detection on an Evolving Thermokarst Using High-Temporal-Frequency Terrestrial Laser Scanning, Selawik River, Alaska. Remote Sens. 2013, 5, 2813–2837. [Google Scholar] [CrossRef] [Green Version]
- Girardeau-Montaut, D.; Roux, M.; Marc, R.; Thibault, G. Change Detection on Point Cloud Data Acquired with a Ground Laser Scanner. Int. Arch. Photogramm. Remote Sens. Spat. Inf. Sci. 2005, 36, 30–35. [Google Scholar]
- Lague, D.; Brodu, N.; Leroux, J. Accurate 3D Comparison of Complex Topography with Terrestrial Laser Scanner: Application to the Rangitikei Canyon (N-Z). ISPRS J. Photogramm. Remote Sens. 2013, 82, 10–26. [Google Scholar] [CrossRef] [Green Version]
- Nourbakhshbeidokhti, S.; Kinoshita, A.M.; Chin, A.; Florsheim, J.L. A Workflow to Estimate Topographic and Volumetric Changes and Errors in Channel Sedimentation after Disturbance. Remote Sens. 2019, 11, 586. [Google Scholar] [CrossRef] [Green Version]
- Guerin, A.; Hantz, D.; Rossetti, J.-P.; Jaboyedoff, M. Brief Communication: Estimating Rockfall Frequency in a Mountain Limestone Cliff Using Terrestrial Laser Scanner. Nat. Hazards Earth Syst. Sci. Discuss. 2014, 2, 123–135. [Google Scholar] [CrossRef]
- Kromer, R.A.; Hutchinson, D.J.; Lato, M.J.; Gauthier, D.; Edwards, T. Identifying Rock Slope Failure Precursors Using LiDAR for Transportation Corridor Hazard Management. Eng. Geol. 2015, 195, 93–103. [Google Scholar] [CrossRef]
- D’Amato, J.; Hantz, D.; Guerin, A.; Jaboyedoff, M.; Baillet, L.; Mariscal, A. Influence of Meteorological Factors on Rockfall Occurrence in a Middle Mountain Limestone Cliff. Nat. Hazards Earth Syst. Sci. 2016, 16, 719–735. [Google Scholar] [CrossRef] [Green Version]
- Bonneau, D.A.; Hutchinson, D.J. The Use of Terrestrial Laser Scanning for the Characterization of a Cliff-Talus System in the Thompson River Valley, British Columbia, Canada. Geomorphology 2019, 327, 598–609. [Google Scholar] [CrossRef]
- Zimmer, B.; Liutkus-Pierce, C.; Marshall, S.T.; Hatala, K.G.; Metallo, A.; Rossi, V. Using Differential Structure-from-Motion Photogrammetry to Quantify Erosion at the Engare Sero Footprint Site, Tanzania. Quat. Sci. Rev. 2018, 198, 226–241. [Google Scholar] [CrossRef]
- Lercari, N. Monitoring Earthen Archaeological Heritage Using Multi-Temporal Terrestrial Laser Scanning and Surface Change Detection. J. Cult. Herit. 2019, 39, 152–165. [Google Scholar] [CrossRef] [Green Version]
- Cook, K.L. An Evaluation of the Effectiveness of Low-Cost UAVs and Structure from Motion for Geomorphic Change Detection. Geomorphology 2017, 278, 195–208. [Google Scholar] [CrossRef]
- James, M.R.; Robson, S.; d’Oleire-Oltmanns, S.; Niethammer, U. Optimising UAV Topographic Surveys Processed with Structure-from-Motion: Ground Control Quality, Quantity and Bundle Adjustment. Geomorphology 2017, 280, 51–66. [Google Scholar] [CrossRef] [Green Version]
- Warrick, J.A.; Ritchie, A.C.; Adelman, G.; Adelman, K.; Limber, P.W. New Techniques to Measure Cliff Change from Historical Oblique Aerial Photographs and Structure-from-Motion Photogrammetry. J. Coast. Res. 2017, 33, 39. [Google Scholar] [CrossRef] [Green Version]
- Esposito, G.; Mastrorocco, G.; Salvini, R.; Oliveti, M.; Starita, P. Application of UAV Photogrammetry for the Multi-Temporal Estimation of Surface Extent and Volumetric Excavation in the Sa Pigada Bianca Open-Pit Mine, Sardinia, Italy. Environ. Earth Sci. 2017, 76, 1–16. [Google Scholar] [CrossRef]
- Anders, K.; Winiwarter, L.; Lindenbergh, R.; Williams, J.G.; Vos, S.E.; Höfle, B. 4D Objects-by-Change: Spatiotemporal Segmentation of Geomorphic Surface Change from LiDAR Time Series. ISPRS J. Photogramm. Remote Sens. 2020, 159, 352–363. [Google Scholar] [CrossRef]
- Crawford, A.J.; Mueller, D.; Joyal, G. Surveying Drifting Icebergs and Ice Islands: Deterioration Detection and Mass Estimation with Aerial Photogrammetry and Laser Scanning. Remote Sens. 2018, 10, 575. [Google Scholar] [CrossRef] [Green Version]
- Girardeau-Montaut, D. CloudCompare (Version 2.11 Alpha). 2019. Available online: http://cloudcompare.org (accessed on 4 June 2020).
- MacLaurin, C.I.; Mahoney, J.B.; Haggart, J.W.; Goodin, J.R.; Mustard, P.S. The Jackass Mountain Group of South-Central British Columbia: Depositional Setting and Evolution of an Early Cretaceous Deltaic Complex 1 This Article Is One of a Series of Papers Published in This Special Issue on the Theme of New Insights in Cordilleran. Can. J. Earth Sci. 2011, 48, 930–951. [Google Scholar] [CrossRef]
- Sturzenegger, M.; Keegan, T.; Wen, A.; Willms, D.; Stead, D.; Edwards, T. Engineering Geology for Society and Territory-Volume 6; Lollino, G., Giordan, D., Thuro, K., Carranza-Torres, C., Wu, F., Marinos, P., Delgado, C., Eds.; Springer International Publishing: Cham, Switzerland, 2015. [Google Scholar] [CrossRef] [Green Version]
- Kromer, R.; Lato, M.J.; Hutchinson, D.J.; Gauthier, D.; Edwards, T. Managing Rockfall Risk through Baseline Monitoring of Precursors with a Terrestrial Laser Scanner. Can. Geotech. J. 2017, 54, 953–967. [Google Scholar] [CrossRef]
- Lato, M.J.; Hutchinson, D.J.; Gauthier, D.; Edwards, T.; Ondercin, M. Comparison of Airborne Laser Scanning, Terrestrial Laser Scanning, and Terrestrial Photogrammetry for Mapping Differential Slope Change in Mountainous Terrain. Can. Geotech. J. 2015, 52, 129–140. [Google Scholar] [CrossRef]
- Teledyne Optech. ILRIS Summary Specification Sheet; Teledyne Optech Incorporated: Vaughan, ON, Canada, 2014. [Google Scholar]
- Pesci, A.; Teza, G.; Bonali, E. Terrestrial Laser Scanner Resolution: Numerical Simulations and Experiments on Spatial Sampling Optimization. Remote Sens. 2011, 3, 167–184. [Google Scholar] [CrossRef] [Green Version]
- Jaboyedoff, M.; Oppikofer, T.; Abellán, A.; Derron, M.H.; Loye, A.; Metzger, R.; Pedrazzini, A. Use of LIDAR in Landslide Investigations: A Review. Nat. Hazards 2012, 61, 5–28. [Google Scholar] [CrossRef] [Green Version]
- Riegl Laser Measurement Systems. Riegl VZ-400i Datasheet; RIEGL Laser Measurement Systems GmbH: Horn, Austria, 2019. [Google Scholar]
- Innovmetric. Polyworks. Quebec City. 2016. Available online: https://www.innovmetric.com (accessed on 4 June 2020).
- Besl, P.; McKay, N. A Method for Registration of 3-D Shapes. IEEE Trans. Pattern Anal. Mach. Intell. 1992, 239–256. [Google Scholar] [CrossRef]
- Riegl Laser Measurement Systems. RiSCAN Pro 2.0. Horn, Austria. 2019. Available online: http://www.riegl.com/products/software-packages/ (accessed on 4 June 2020).
- Lato, M.J.; Bevan, G.; Fergusson, M. Gigapixel Imaging and Photogrammetry: Development of a New Long Range Remote Imaging Technique. Remote Sens. 2012, 4, 3006–3021. [Google Scholar] [CrossRef] [Green Version]
- Agisoft. PhotoScan Professional. St. Petersburg, Russia. 2017. Available online: https://www.agisoft.com/ (accessed on 4 June 2020).
- Westoby, M.J.; Brasington, J.; Glasser, N.F.; Hambrey, M.J.; Reynolds, J.M. “Structure-from-Motion” Photogrammetry: A Low-Cost, Effective Tool for Geoscience Applications. Geomorphology 2012, 179, 300–314. [Google Scholar] [CrossRef] [Green Version]
- Smith, M.W.; Carrivick, J.L.; Quincey, D.J. Structure from Motion Photogrammetry in Physical Geography. Prog. Phys. Geogr. Earth Environ. 2016, 40, 247–275. [Google Scholar] [CrossRef]
- Weidner, L.; Walton, G.; Kromer, R. Geomorphology Generalization Considerations and Solutions for Point Cloud Hillslope Classi Fi Ers. Geomorphology 2020, 354, 107039. [Google Scholar] [CrossRef]
- Ester, M.; Kriegel, H.; Sander, J.; Xu, X. A Density-Based Algorithm for Discovering Clusters in Large Spatial Databases with Noise. In Proceedings of the Second International Conference on Knowledge Discovery and Data Mining, Portland, OR, USA, 2–4 August 1996; Simoudis, E., Fayyad, U., Han, J., Eds.; AAAI Press: Menlo Park, CA, USA, 1996; pp. 226–231. [Google Scholar]
- Edelsbrunner, H.; Mücke, E.P. Three-Dimensional Alpha Shapes. ACM Trans. Graph. 1994, 13, 43–72. [Google Scholar] [CrossRef]
- Mathworks. Matlab (Version R2019a). 2019. Available online: https://www.mathworks.com/ (accessed on 4 June 2020).
- Blott, S.J.; Pye, K. Particle Shape: A Review and New Methods of Characterization and Classification. Sedimentology 2008, 55, 31–63. [Google Scholar] [CrossRef]
- Sneed, E.; Folk, R. Pebbles in the Lower Colorado River, Texas a Study in Particle Morphogenesis. J. Geol. 1958, 66, 114–150. [Google Scholar] [CrossRef]
- Abbott, B.; Bruce, I.; Savigny, W.; Keegan, T.; Oboni, F. A Methodology for the Assessment of Rockfall Hazard and Risk along Linear Transportation Corridors. In Engineering Geology: A Global View from the Pacific Rim; A A Balkema Publishers: Rotterdam, The Netherlands, 1998; pp. 1195–1200. [Google Scholar]
- Lato, M.; Diederichs, M.S.; Hutchinson, D.J.; Harrap, R. Optimization of LiDARscanning and Processing for Automated Structural Evaluation of Discontinuities in Rockmasses. Int. J. Rock Mech. Min. Sci. 2009, 46, 194–199. [Google Scholar] [CrossRef]
- Riquelme, A.J.; Abellán, A.; Tomás, R.; Jaboyedoff, M. A New Approach for Semi-Automatic Rock Mass Joints Recognition from 3D Point Clouds. Comput. Geosci. 2014, 68, 38–52. [Google Scholar] [CrossRef] [Green Version]


















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Number of Rockfalls | 20 cm | 30 cm | 40 cm | 50 cm | 75 cm | 100 cm |
|---|---|---|---|---|---|---|
| Conglomerate | 12 | 11 | 11 | 10 | 8 | 5 |
| Sandstone | 923 | 866 | 804 | 689 | 487 | 308 |
| Shale | 897 | 820 | 750 | 639 | 455 | 290 |
| Sandy siltstone | 1547 | 1436 | 1287 | 1124 | 815 | 531 |
| Argillite | 262 | 247 | 230 | 200 | 147 | 95 |
| Total filtered | 14 | 16 | 10 | 11 | 9 | 7 |
| Grand total | 3641 | 3380 | 3082 | 2662 | 1912 | 1229 |
| Rockfall Volume [m3] | 20 cm | 30 cm | 40 cm | 50 cm | 75 cm | 100 cm |
|---|---|---|---|---|---|---|
| Minimum | 1.01 × 10−3 | 1.02 × 10−3 | 1.03 × 10−3 | 1.25 × 10−3 | 1.11 × 10−3 | 1.43 × 10−3 |
| Maximum | 3850 | 3852 | 3856 | 3859 | 3913 | 3862 |
| Median | 1.19 × 10−2 | 1.27 × 10−2 | 1.50 × 10−2 | 1.92 × 10−2 | 3.64 × 10−2 | 7.39 × 10−2 |
| Average | 1.63 | 1.76 | 1.96 | 2.28 | 3.30 | 5.19 |
| Total | 5944 | 6002 | 6113 | 6186 | 6443 | 6582 |
© 2020 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
DiFrancesco, P.-M.; Bonneau, D.; Hutchinson, D.J. The Implications of M3C2 Projection Diameter on 3D Semi-Automated Rockfall Extraction from Sequential Terrestrial Laser Scanning Point Clouds. Remote Sens. 2020, 12, 1885. https://doi.org/10.3390/rs12111885
DiFrancesco P-M, Bonneau D, Hutchinson DJ. The Implications of M3C2 Projection Diameter on 3D Semi-Automated Rockfall Extraction from Sequential Terrestrial Laser Scanning Point Clouds. Remote Sensing. 2020; 12(11):1885. https://doi.org/10.3390/rs12111885
Chicago/Turabian StyleDiFrancesco, Paul-Mark, David Bonneau, and D. Jean Hutchinson. 2020. "The Implications of M3C2 Projection Diameter on 3D Semi-Automated Rockfall Extraction from Sequential Terrestrial Laser Scanning Point Clouds" Remote Sensing 12, no. 11: 1885. https://doi.org/10.3390/rs12111885