ROSACE: A Proposed European Design for the Copernicus Ocean Colour System Vicarious Calibration Infrastructure

 , , , , , , , , , , , , add
Show full author list
, , , , , , , , , , , , add
Show full author list
Abstract
:
1. Introduction
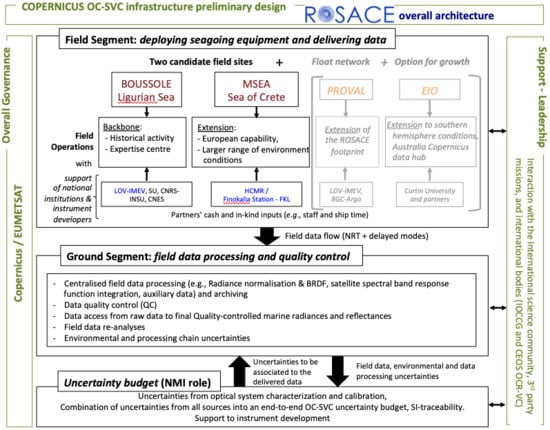
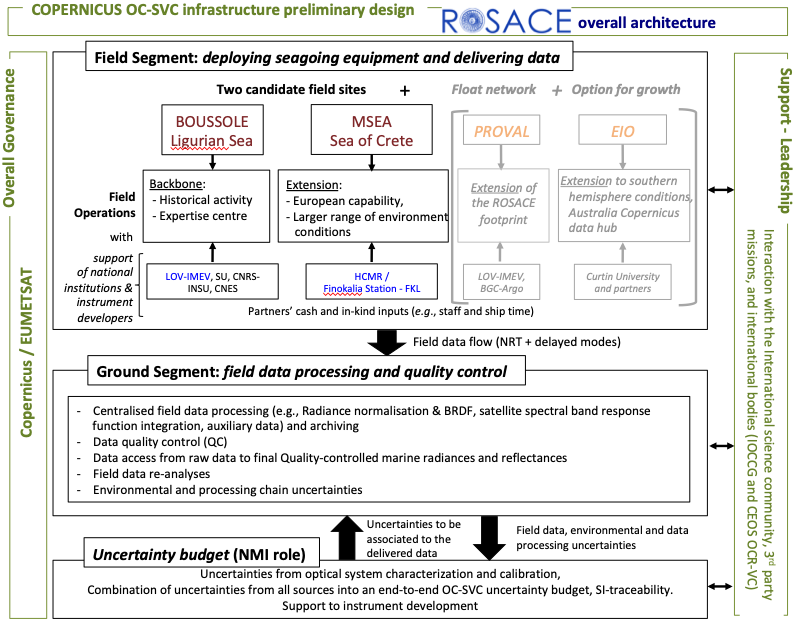
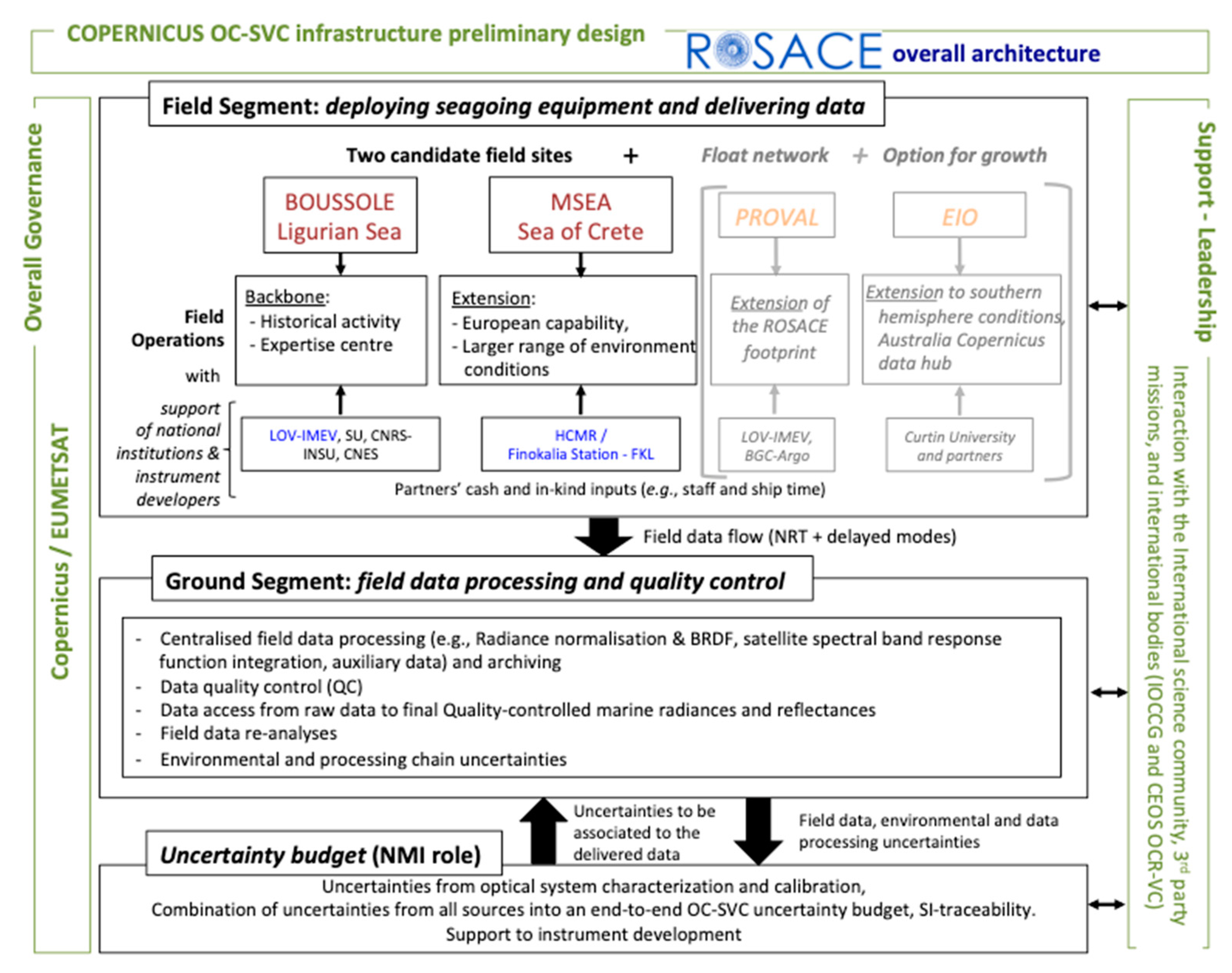
2. High-Level Rationale for the Proposed ROSACE OC-SVC Infrastructure
- Take advantage as much as possible of existing European expertise in OC-SVC that has been developed in the past two decades under European (ESA in particular) and national funding, including field operations, SI-traceability and evaluation of uncertainties, associated data quality assurance and quality control and processing and generation of satellite matchups and OC-SVC gains.
- Reinforce the above and, in addition, build a new European capability in the domain of OC-SVC field radiometry, in order to ensure long-term sovereignty and stability of the Copernicus SVC infrastructure. This includes two sites, collaboration with a national metrology institute (NMI), and new technology developments. The two field sites are in the Ligurian Sea (BOUSSOLE heritage) and the Cretan Sea (MSEA). They were selected by the ESA “Fiducial Reference Measurements For Satellite Ocean Colour” (FRM4SOC [22,23]) study as the two of the best European locations among those currently under evaluation, in part because significant logistical capabilities adapted to maintaining an OC-SVC infrastructure already exist at these sites.
- Rely on strong national support in conjunction with the main Copernicus funding to ensure that the ROSACE OC-SVC infrastructure is backed by long-term sustainable staff, capability and logistical resources.
- Be ready to incorporate additional partnerships in order to improve redundancy inside the OC-SVC infrastructure, to enlarge the database onto which the uncertainty budget is built, to improve, if needed, the methodological baseline used to compute the SVC gains, and to increase the matchup capacity of the OC-SVC infrastructure.
- 5.
- Ensure close communication with international bodies that work on establishing OC-SVC requirements and fostering international collaboration (e.g., the International Ocean Colour Coordinating Group, IOCCG and the Committee on Earth Observation Satellites Ocean Colour Virtual Constellation, CEOS OCR-VC).
- 6.
- Maintain development activities that are vital to allow improvement in data acquisition and processing procedures and ultimately improve the data quality of the OC-SVC infrastructure, and also to better secure national support for this European infrastructure.
3. The Field Segment
3.1. Metrology Rationale
3.2. Practical Considerations, Specific Role of Each Site
- Geophysical properties are similar yet different enough at the two sites, so that they are complementary, not simply redundant (see the sites descriptions in Section 3.3 and Section 3.4).
- Expertise in deploying and maintaining large oceanographic buoys is similar at the two sites, i.e., the Laboratoire d’Océanographie de Villefranche from the Institut de la Mer de Villefranche (LOV-IMEV) and the Hellenic Centre for Marine Research (HCMR). However, a longer and more developed experience with optics, radiometry and OC-SVC exists at LOV-IMEV.
- BOUSSOLE buoys and instrumentation exist at LOV-IMEV, ready to be used (until improved versions become available) in continuation of the present effort and to host the new optical system for testing, and ensure continuity of the time series.
- Improvements in the buoy structure can be tested before new versions are built and operationally deployed at MSEA and BOUSSOLE.
- The new optical system can be deployed in parallel to the one currently used (SeaBird HyperOCR radiometers). This is not to qualify the new radiometer system, which will be of superior radiometric quality to that of the current one, but rather is an opportunity to ensure continuity of the time series between MERIS and OLCI observations.
- Testing of new equipment or further improvement of the optical system, can be carried out on one site before being transitioned to permanent upgrades at both sites.
3.3. The BOUSSOLE Site
3.3.1. Location and General Characteristics
3.3.2. Weather and General Hydrology
3.3.3. Phytoplankton Chlorophyll-a, Water Type and Inherent Optical Properties
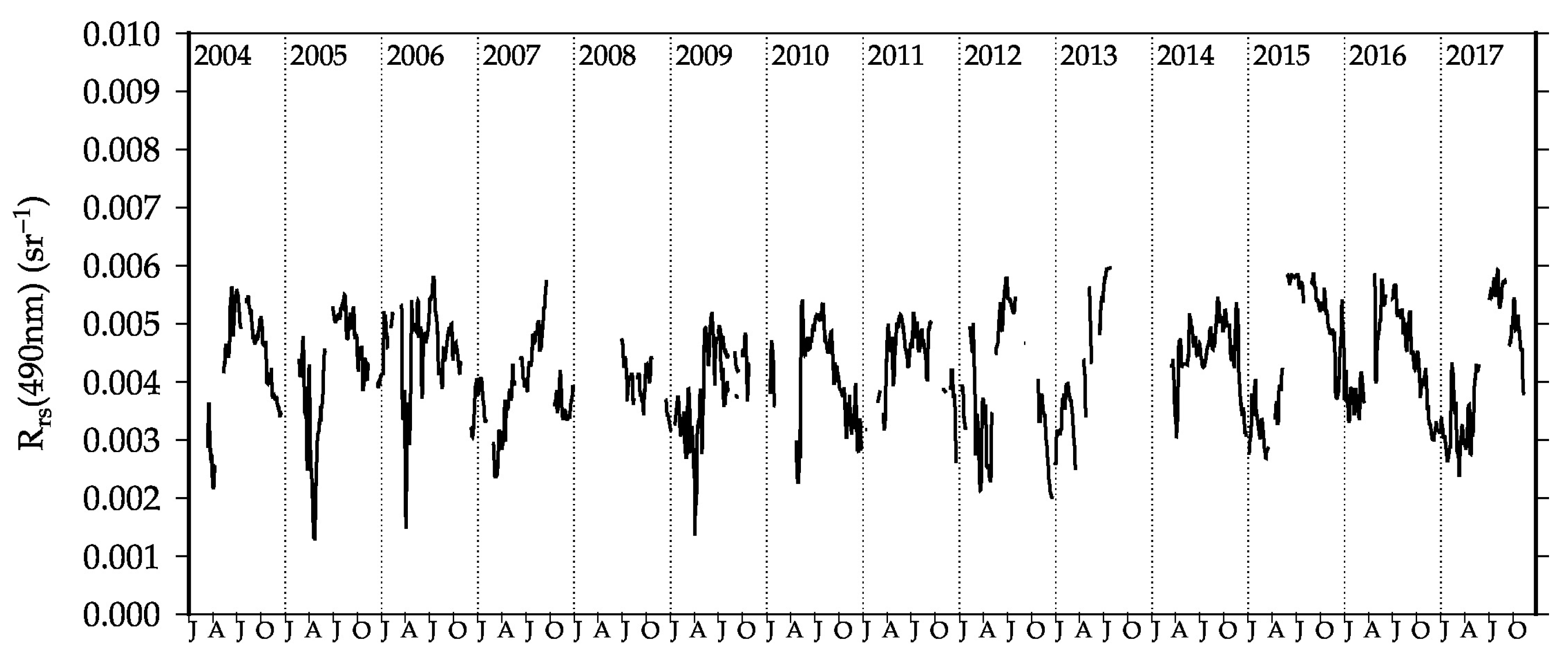
3.3.4. Remote-Sensing Reflectance
3.3.5. Atmospheric Parameters
3.3.6. Spatial Homogeneity
3.3.7. Summary of the BOUSSOLE Site Characteristics Relevant to OC-SVC
- Low currents.
- Moderate wind speed/wave height.
- Case-1 waters throughout the year.
- [TChl-a] concentration < 0.1–0.2 mg m−3 in summer and fall.
- Characterised kilometre-scale spatial variability.
- High occurrence of clear skies.
- Low atmospheric aerosol load throughout the year.
- Well-established oceanographic institute (>130 years) close to the site (LOV-IMEV, Villefranche-sur-Mer, France).
- Well-established expertise in marine optics (>60 years).
- Well-trained permanent staff.
- Ships and other necessary equipment all available.
- Proven capacity to manage the BOUSSOLE platform.
- Proven record (>16 years) of uninterrupted acquisition of OC-SVC-quality observations.
- Field site identified on marine charts within an area identified for scientific work.
- Meteorological buoy managed by the French weather forecast agency 2 nmi from BOUSSOLE.
3.4. The MSEA Site
3.4.1. Location and General Characteristics
3.4.2. Weather and General Hydrology
3.4.3. Phytoplankton Chlorophyll-a, Water Type and Inherent Optical Properties
3.4.4. Remote-Sensing Reflectance
3.4.5. Atmospheric Parameters
3.4.6. Spatial Homogeneity
3.4.7. Summary of the MSEA Site Characteristics Relevant to OCR-SVC
3.5. The Deployment Structure
3.5.1. General Architecture and Design
- Minimizing shading on underwater instruments.
- Maximizing stability (low tilt, no vertical movements), under the specific weather conditions encountered at the deployment site (in terms of currents, tides, wind and wave characteristics).
- Being deployable on a deep-water site.
- Giving easy access to divers for handling and cleaning instruments.
- Keeping above-water radiometers far enough from the sea surface to minimize sea spray.
- Installing in-water radiometers close enough to the sea surface to enable a proper extrapolation of measured quantities to the “0-” level and far enough from the sea surface to minimize possible impacts from storms and occasional yachting activity.
- The concept has been theoretically evaluated, then tested on a reduced-scale model, and then deployed successfully in real conditions.
- The concept has been demonstrated to be successful. Maintenance procedures effectiveness has been proven over the long-term.
- Options for further improvement of the structure’s behaviour at sea (reducing tilt) have been identified (see the next section).
3.5.2. Upgrade of the BOUSSOLE Buoy
- The overall buoyancy, which is primarily determined by the volume of the main buoyancy sphere (about 95% of the total buoyancy).
- The distance between the centre of buoyancy of the entire buoy and the connection point to the mooring cable.
- The platform plus payload mass.
- The distance between the centre of gravity (determined by the distribution of masses) and the connection point of the buoy to the mooring cable.
3.6. Matchup Potential of the Two Sites
3.6.1. Potential for OC-SVC Matchups: Satellite Approach
- The SZA is lower than 70°.
- There is no sun glint or saturation of the image.
- There is no cloud contamination in the image or whitecaps.
- The viewing zenith angle (VZA) is lower than 56°.
- Aerosol optical thickness (AOT) < 0.15 at 865 nm (low enough so that atmospheric correction has a chance to perform well).
- [TChl-a] concentration < 0.2 mg m−3 (meso- to oligo-trophic waters).
3.6.2. Potential for OC-SVC Matchups: Field Data Approach
- No glint risk.
- SZA at the time of the satellite overpass < 70°.
- VZA < 56°.
- Clear-sky index < 0.1 at BOUSSOLE and MSEA, as in [3].
- [TChl-a] < 0.2 mg m−3.
- Buoy tilt < 5°.
- Wind speed < 7.5 m s−1.
4. The Optical System and Calibration Strategy and Equipment
4.1. Technical Requirements for the Field Radiometers
- The radiometers have to measure the underwater nadir radiance, Lu, the above-water downward irradiance, Es, and the underwater downward irradiance, Ed. The latter is not strictly speaking used for OC-SVC, yet is needed to allow the determination of the diffuse attenuation coefficient for downward irradiance, Kd, as a proxy for absorption, itself useful for self-shading assessment.
- Spectral coverage should be sufficient to cover both the in-band and full-band spectral characteristics of the satellite sensor, specifically 380–900 nm for S3/OLCI, S2/MSI and ideally from 340 nm for the future NASA Plankton, Aerosol, Cloud and ocean Ecosystem (PACE) mission. The measurements should be hyperspectral, i.e., sampling the full spectral range at a resolution better than 3 nm, with a sampling interval of about 1 nm. The spectral calibration and its stability must allow maintaining the radiometric accuracy of the retrieved products (typically 0.2 nm for each channel of the field spectrometer).
- Stray light shall be characterised for each radiometer, so that appropriate correction can be applied to measurements.
- Radiometric calibration of the radiometers (in air) must be held to 1%–2% uncertainty in the VIS domain (above 400 nm) and traceable to SI units.
- For underwater radiance radiometers, the half-angle field of view (FOV) should be < 10°, although this requirement can be relaxed in open ocean waters as far as the instrument does not see the deployment platform.
- The immersion factors should be experimentally determined for each radiometer.
- The temperature response of the detectors shall be determined, and the internal temperature of the instrument measured continuously so that temperature effects are known, quantified and can be corrected.
- The polarisation sensitivity of the radiometers must be less than 1% and fully characterised.
- Dark signals shall be measured and corrected.
- The linearity of the detectors must be characterised and corrected to have an uncertainty of less than 0.1%.
- The cosine response of the surface irradiance radiometers shall be characterised, so that appropriate correction can be applied to measurements.
4.2. Predesign of the Optical System
- The optics is made of fused silica (HPFS 7980 or 8655) with minimum 92% internal transmission in the whole spectral range (340–900 nm). The standard MgF2 coating as a broadband antireflection coating will be used.
- The Gershun tube includes four levels of black anodized aluminium baffles, for FOV definition and geometric stray light reduction. The half FOV is set at 7° in water.
- The shutter is mounted in a translation/rotation stage. It is made of black anodized aluminium on both sides.
- To avoid light scattering into pixels from the high intensity of the incandescent calibration source in the NIR domain, a short-pass filter is inserted in the optical path with a cut-off wavelength centred at 900 nm.
- The dichroic beam splitter is a broadband dichroic mirror with wavelength cutting at 500 nm. All beam splitters have little dependence on polarization at 45° with a cone half angle of 7°.
4.3. Predesign of the Radiometers and Data Acquisition and Transmission System
- The light collecting optics.
- Two spectrometers and their drivers.
- A depth sensor.
- Three temperature/relative humidity sensors.
- One-stage Peltier systems to thermally stabilize the spectrometers.
- Radiators in contact with the structure for heat dissipation (above-water instrument only).
- A 2-axis tilt sensor.
- A driver for the motorized shutter.
- An acquisition and communication card.
- A power supply card.
- Standard marine connectors.
4.4. Absolute and Relative Calibration and Characterization: Strategy and Equipment
4.4.1. General Architecture
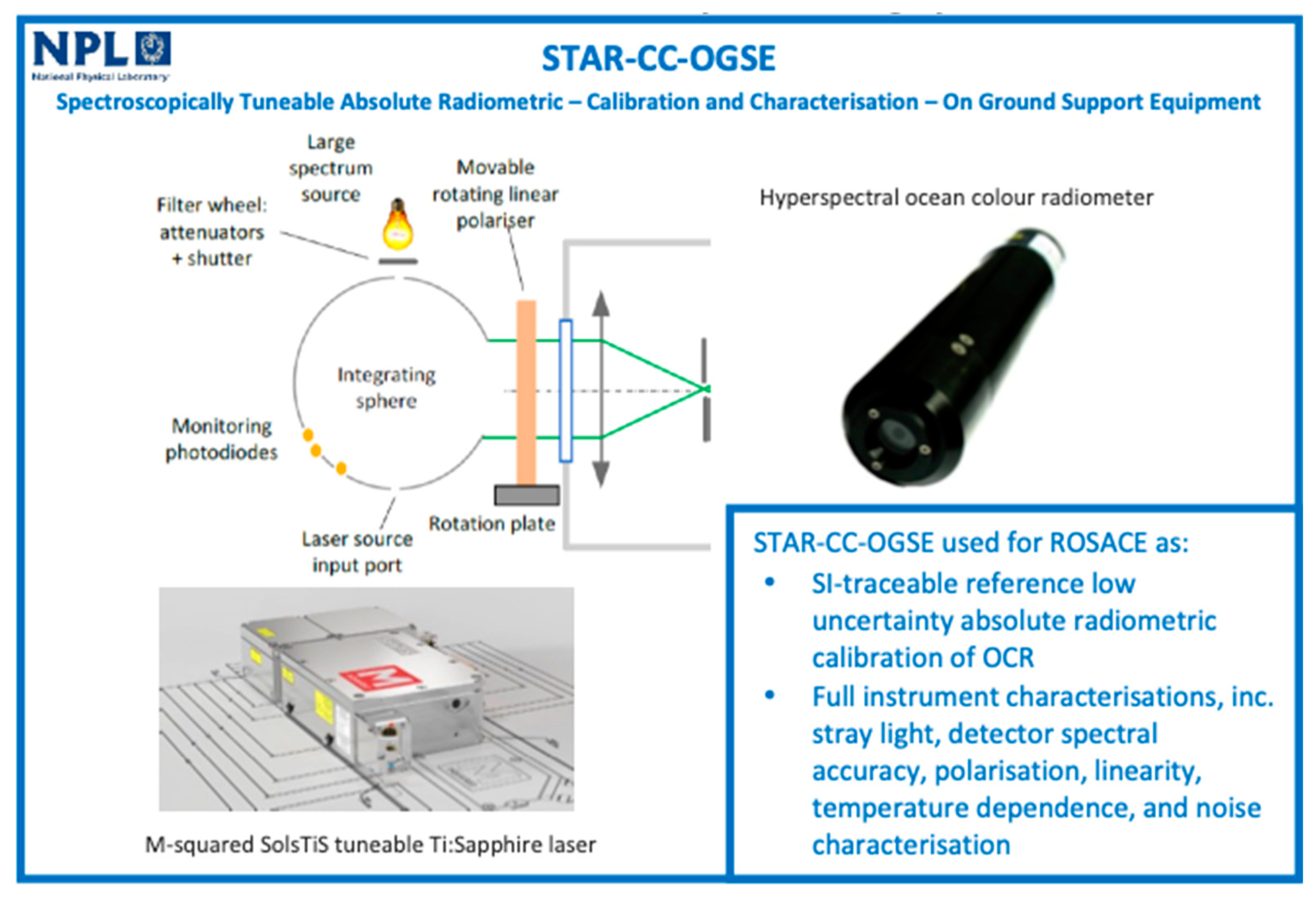
4.4.2. NMI Primary Absolute Radiometric Calibration and Characterisation: The STAR-CC-OGSE System
- A large aperture SI-traceable calibrated integrating sphere source primarily for radiometric calibration and characterisation.
- A collimated beam source, equipped with an interchangeable, position fine-tuneable feature mask for optical performance characterisation. The features of the mask can be readily customised to suit various applications.
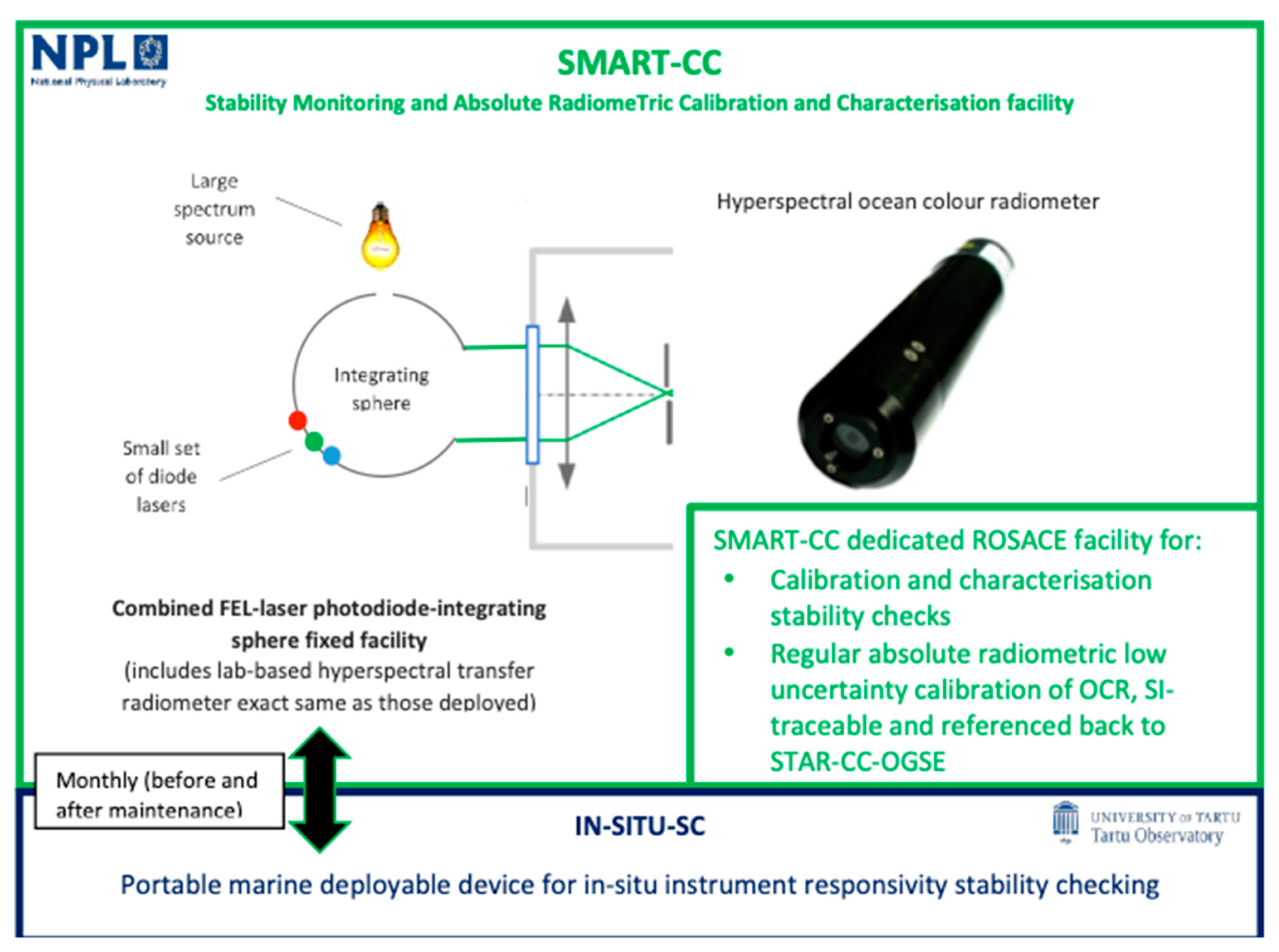
4.4.3. Site-Based Routine Absolute Radiometric Calibration: The SMART-CC System
- Radiometer mounting: custom designed self-centring mounts to ensure the same position to within a few microns between calibrations.
- Light sources: the broadband source will be a quartz-tungsten-halogen (QTH) lamp. This may simply be a QTH bulb positioned at one of the sphere ports and powered with a suitable, stable power supply. For the greatest stability it is best to use a lamp in a housing with a feedback loop provided by an internal, thermoelectrically cooled photodiode. In addition, to minimize the use of the sphere surface for coupling, quasi-monochromatic sources such as temperature controlled single mode lasers, will feed into the sphere via optical fibre.
- Room stray light: to ensure external stray light does not affect the calibration of the radiometers, the SMART-CC system will be enclosed to block the ambient light during measurements.
- Sphere monitoring: silica detectors are well known to be linear over several decades’ incident optical power and stable over long periods of time. Use of a trap detector in the accompanying radiometer will allow identifying any drift in the SMART-CC system in excess of 0.2%.
4.4.4. Routine Relative Calibration in the Field: IN-SITU-SC
4.4.5. Summary of the Calibration Strategy
- STAR-CC-OGSE, allowing very low uncertainty absolute radiometric calibration and full radiometric characterisation using the new NPL tuneable laser system, to be used on brand new radiometers and then as needed (for example if a radiometer had to be repaired).
- SMART-CC: low uncertainty (1%–1.5%) regular calibration stability checks and absolute radiometric recalibrations of radiance sensors via instrument swap-out using the NPL designed non-tuneable laser-integrating sphere-FEL based system. If the results of these regular calibration and stability tests are unsatisfactory, for example showing significant change in radiometer responsivity, then the instruments are sent to NPL for recalibration/recharacterisation using the STAR-CC-OGSE.
- FEL lamps: regular calibration stability checks and absolute radiometric calibration of irradiance sensor using standard 1000 W quartz tungsten halogen lamps. These standards are regularly recalibrated at NPL after maximum 50 h of use.
- IN-SITU-SC: a field deployable relative calibration source to check stability of the optical instrumentation in situ during monthly maintenance cruises.
- In-air reality checks: a custom intercalibration bench will be developed to allow relative comparison between radiometers before and after deployment in realistic conditions. This will be realized by acquiring data with radiometers pointing toward the sun or a common target (calibrated blue fabric) in a natural environment (in air) not perturbed by reflections and shadowing and with a spectrum closer to what the instruments experience when deployed. These verifications extend the strict laboratory conditions in which the calibration is realized in order to detect possible anomalies in the radiometer response.
4.5. Biofouling Mitigation
5. Uncertainty Budget
5.1. Methodology
- The uncertainty associated with the given effect.
- The sensitivity coefficient required to propagate the uncertainties associated with that effect to uncertainty associated with the measurand.
- The correlation structure over spatial, temporal and spectral dimensions for errors from this effect.
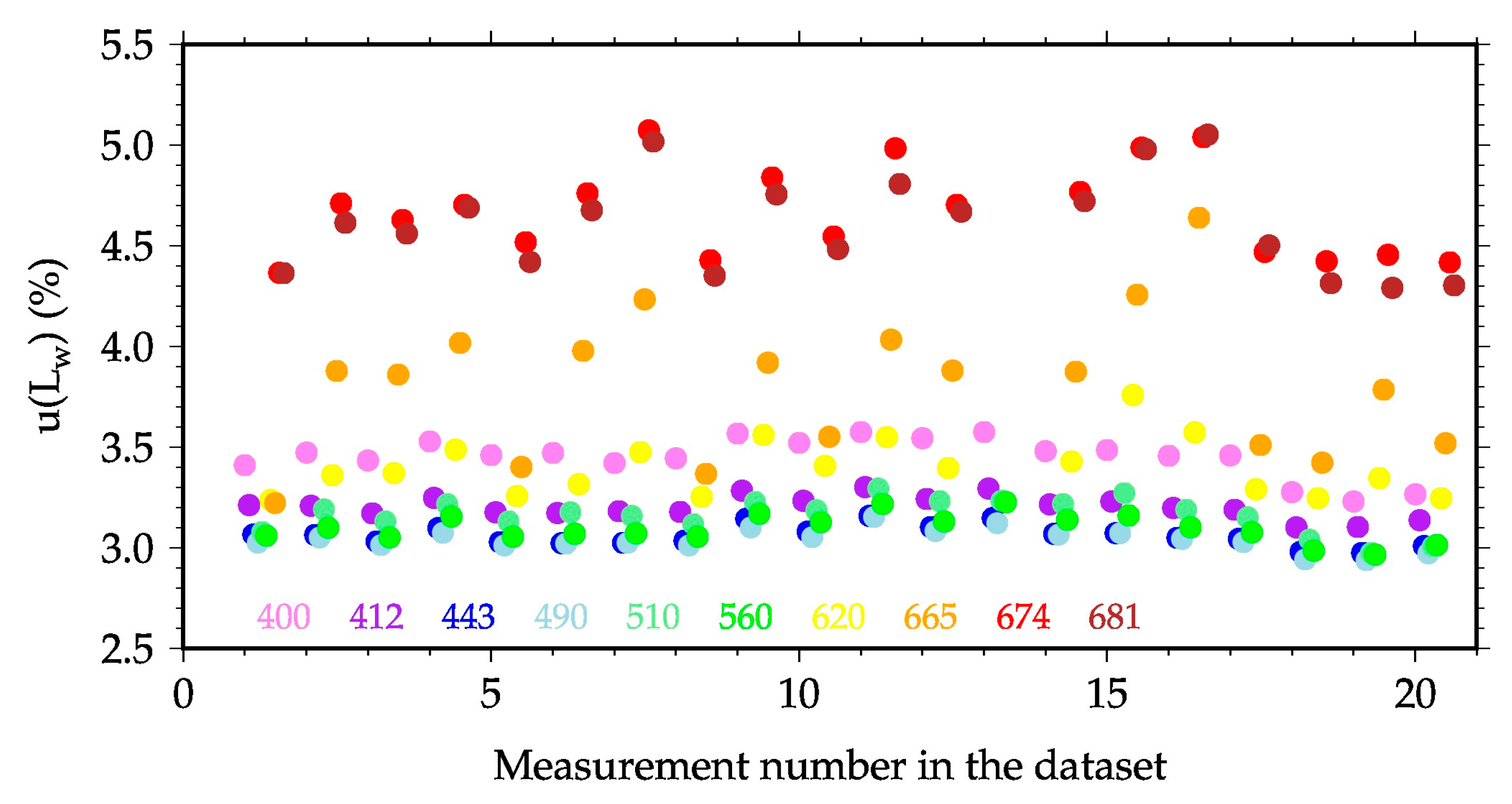
5.2. Preliminary Uncertainty Budget
6. The Ground Segment
6.1. Role and General Architecture
- The NRT processing was performed as soon as the data were received from the buoys, with products generated on the fly along with their quality flag and uncertainty estimates, following automatic and documented procedures (including QC. See Section 6.4 and Section 6.5). An additional functionality will allow the site operator to change the QC flags through a semisupervised quality control interface. This information, i.e., the change of flag and its old and new value, will be incorporated into the NRT product.
- The adjusted mode (AM) products were generated by using data collected during monthly servicing cruises, when the instrumentation onboard the ROSACE buoys were cleaned, checked and maintained. During these operations, in situ sampling and radiometric profiles will be carried out. These data will be used for adjusting the instrument calibration for data collected during the previous month, and therefore to readjust the processing. Existing data products were thus reprocessed with these updated inputs.
- The delayed mode (DM) products will be generated through reanalysis of a longer time series of data, typically every 6 months at each rotation of instrumentation. This processing step allows better assessment of the overall consistency of the data (e.g., by examining seasonality, trends and comparison with climatology). The results of this reanalysis might lead to changes in the products’ annotations.
6.2. Data Products and Levels
- The spectral fully-normalised water-leaving radiance, [Lw]N (W m−2 nm−1 sr−1).
- The remote-sensing reflectance, Rrs (sr−1).
- Optical data products, including the normalized water leaving radiance used for OC-SVC.
- Platform data products, e.g., buoy tilt.
- Metocean data products, e.g., wave conditions and wind speed.
- Calibration and correction data, e.g., calibration gains.
- Configuration management parameters, e.g., processor version.
- Logbooks including operators’ comments on specific situations and the local environmental background.
6.3. Data Processing and Storage
- The configuration (e.g., of calibration or correction, depending on [TChl-a], etc.) may evolve from one rotation of the optical system or buoy to the other and then the corresponding parts of the database will need to be updated (manually) by maintaining the versioning in the database.
- The QC macro flags can be updated by an operator through a semisupervised quality control (SSQC— see Section 6.4.
- The data need to be reprocessed (back in time) each time there is an update in the configuration files.
6.4. Semisupervised Quality Control
- To check the product at each stage of its elaboration (from raw data to the final product).
- To check its consistency with respect to previous acquisitions and/or ancillary information from on-site campaigns or Metocean or satellite data.
- To visualize all related contextual information (e.g., sea state, platform behaviour) and auxiliary products that have been used to derive the consolidated product, its uncertainty and its quality annotation.
- Annotate the product with a specific text comment that will be stored in the equivalent of a logbook.
- Raise a new quality flag on the product. This new flag will be added in parallel to the flag that was given automatically by the processing system (i.e., the initial flag is not replaced). This allows traceability of flagging.
- A hierarchical visualization web tool allowing any operator to navigate from a higher level product down to initial raw data while at the same time having access to all associated uncertainties and contextual information.
- The capability to annotate the data by adding a new QC flag value, and/or providing a comment in a textual form that will be stored in a log book.
- The capability to edit and consult the logbook.
- The capability to communicate with other operators, at other sites, through a simple chat system. This capability is also extended to communication between operators and the ROSACE ground segment manager.
- The capability to extract information in a simple file format (e.g., csv) to allow extra analysis.
6.5. Final QC
7. Infrastructure Operations
7.1. Field Segment
7.2. Ground Segment
7.3. Governance
8. The Profiling Float Network Option
8.1. Increasing the Matchup Capacity of the Infrastructure
8.2. The ProVal Float and its ROSACE Upgrade
- Implementation of the new fit-for-purpose CIMEL radiometer, which will require, in particular, an increased depth rating as compared to the version to be installed on the buoys.
- Development of on-board data processing in order to make NRT transmission possible despite the large amount of data generated by hyperspectral radiometers. A new acquisition board is under development for the next generation of ProVal floats, which will be used for the ROSACE floats. The full data set can be downloaded at float recovery.
- Inclusion of a rechargeable battery. Opening a float to swap batteries is time consuming and may compromise waterproofness of the float, so we will implement a rechargeable battery as is done now on gliders [103].
8.3. Minimum Configuration and Operations
9. Conclusions
- Answers all OC-SVC requirements that were established in [21].
- Includes two sites (BOUSSOLE and MSEA) that are demonstrably suited to providing a large number of OC-SVC-quality matchups every year.
- Minimises risks because it builds on an existing quasi-operational capability (BOUSSOLE).
- Minimises the development time, because of the above point, plus it exploits existing expertise and elements that can still be used in the meantime before a new system becomes fully operational.
- Minimises costs for delivering the requirement of multiple sites.
- Maintains, optimises and expands current European expertise in order to provide a coordinated effort and sovereignty for the Copernicus OCR SVC infrastructure.
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
Appendix A

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Symbol | Description, and Units when Relevant |
|---|---|
| The two measurements depths on the buoy (m) | |
| The upwelling radiance measured in water at a given depth (W m−2 nm−1 sr−1) | |
| , | The dark-corrected signal per instrument, for the two measurement depths (W m−2 nm−1 sr−1) |
| Instrument-specific Quantities | |
| The median light and dark readings (counts) | |
| , | Radiometric calibration coefficient |
| Radiometric stability evaluated post deployment | |
| Spectral calibration actual central wavelength of each pixel and its accuracy | |
| Detector linearity correction | |
| Temperature correction | |
| Spectral stray light correction | |
| Polarisation sensitivity correction | |
| Immersion factor | |
| Shading correction | |
| Derived Parameters | |
| The diffuse attenuation coefficient for upwelling radiance (m−1) | |
| The Hydrolight-based [105] extrapolation correction (see Appendix A in [28]). | |
| The Fresnel reflection coefficient for the water-air interface | |
| The refractive index of seawater | |
| Input to Various Models | |
| Generic term for a function | |
| [TChl-a] | Total chlorophyll-a concentration (mg m−3) |
| Solar Zenith Angle (degrees) | |
| Seawater salinity (psu) | |
| Atmospheric pressure (hPa) | |
| Water Temperature (degrees C) | |
| Wind speed (m s−1) | |
| Viewing angle (degrees) | |
| Actual Instrument Depth Evaluation * | |
| Depth at the pressure sensor (m) | |
| The buoy/instrument tilt derived from 2-axis tilt sensors (degrees) | |
| Distance between the lower arm and the pressure sensor (m) | |
| , | Lower and upper buoy arm length (m) |
| Distance between the arms (m) | |
| Name of Effect | Noise in Light Counts § | |
|---|---|---|
| Affected term in measurement function | ||
| Instruments in the series affected | All | |
| Correlation type and form | Temporal within deployment | Random |
| Temporal between deployments | Random | |
| Spectral (hyperspectral in-situ) | Random | |
| Correlation scale | Temporal within deployment | 0 |
| Temporal between deployments | 0 | |
| Spectral (hyperspectral in-situ) | 0 | |
| Channels/bands | List of channels/bands affected | All |
| Error correlation coefficient matrix | Identity – No correlation | |
| Uncertainty | PDF shape | Gaussian |
| Units | Counts | |
| Magnitude | Less than 0.1% | |
| Sensitivity coefficient | ||
| Name of Effect | Detector Calibration Systematic Error | Detector Calibration Random Error 1, 2 | Detector Calibration Stability Model Error 1, 2 | |
|---|---|---|---|---|
| Affected term in measurement function | , , , | , , , | ||
| Instruments in the series affected | All | All | All | |
| Correlation type and form | Temporal within deployment | Rectangular Absolute | Rectangular Absolute | Rectangular Absolute |
| Temporal between deployments | Rectangular Absolute | Random | Random | |
| Spectral (hyperspectral in-situ) | To be defined | To be defined | To be defined | |
| Correlation scale | Temporal within deployment | −∞,+∞ | −∞,+∞ | −∞,+∞ |
| Temporal between deployments | a,b § | 0 | 0 | |
| Spectral (hyperspectral in-situ) | To be defined | To be defined | To be defined | |
| Channels/bands | List of channels/bands affected | All | All | All |
| Error correlation coefficient matrix | Identity – No correlation | Identity – No correlation | Identity – No correlation | |
| Uncertainty | PDF shape | Gaussian | Gaussian | Gaussian |
| Units | Radiance/Counts | Radiance/Counts | Radiance/Counts | |
| Magnitude | 0.70% | 0.25% | Less than 1% | |
| Sensitivity coefficient | ||||
| Name of Effect | Shading Correction Model Error | Hydrolight Correction Model Error | Refractive Index of Seawater Model Error | Fresnel Reflection Model Error | |
|---|---|---|---|---|---|
| Affected term in measurement function | |||||
| Instruments in the series affected | All | All | All | All | |
| Correlation type and form | Temporal within deployment | Random | Random | Rectangular Absolute | Rectangular Absolute |
| Temporal between deployments | Random | Random | Rectangular Absolute | Rectangular Absolute | |
| Spectral (hyperspectral in-situ) | To be defined | To be defined | To be defined | To be defined | |
| Correlation scale | Temporal within deployment | 0 | 0 | −∞,+∞ | −∞,+∞ |
| Temporal between deployments | 0 | 0 | −∞,+∞ | −∞,+∞ | |
| Spectral (hyperspectral in-situ) | To be defined | To be defined | To be defined | To be defined | |
| Channels/bands | List of channels/bands affected | All | All | All | All |
| Error correlation coefficient matrix | Identity – No correlation | Identity – No correlation | Matrix of 1’s – fully correlated | Matrix of 1’s—fully correlated | |
| Uncertainty | PDF shape | Gaussian | Gaussian | Gaussian | Gaussian |
| Units | % | % | % | % | |
| Magnitude | 2 | 0.5% | 0.9% § | 0.04% negligible | |
| Sensitivity coefficient | |||||
References and Note
- Gordon, H.R. In-orbit calibration strategy for ocean color sensors. Remote Sens. Environ. 1998, 63, 265–278. [Google Scholar] [CrossRef]
- Ohring, G.; Tansock, J.; Emery, W.; Butler, J.; Flynn, L.; Weng, F.; St. Germain, K.; Wielicki, B.; Cao, C.; Goldberg, M.; et al. Achieving satellite instrument calibration for climate change. Eos Trans. AGU 2007, 86, 136. [Google Scholar] [CrossRef]
- Franz, B.A.; Bailey, S.W.; Werdell, P.J.; McClain, C.R. Sensor-independent approach to the vicarious calibration of satellite ocean color radiometry. Appl. Opt. 2007, 46, 5068–5082. [Google Scholar] [CrossRef] [PubMed]
- Bailey, S.W.; Werdell, P.J. A multi-sensor approach for the on-orbit validation of ocean color satellite data products. Remote Sens. Environ. 2006, 102, 12–23. [Google Scholar] [CrossRef]
- McClain, C.R.; Esaias, W.E.; Barnes, W.; Guenther, B.; Endres, D.; Hooker, S.B.; Mitchell, G.; Barnes, R. Calibration and Validation Plan for SeaWiFS. NASA Tech. Memo. 1992, 3, 104566. [Google Scholar]
- McClain, C.R.; Hooker, S.B.; Feldman, G.C.; Bontempi, P. Satellite data for ocean biology, biogeochemistry and climate research. Eos Trans. AGU 2006, 87, 337–343. [Google Scholar] [CrossRef]
- Zibordi, Z.; Mélin, F.; Voss, K.J.; Johnson, B.C.; Franz, B.A.; Kwiatkowska, E.; Huot, J.P.; Wang, M.; Antoine, D. System Vicarious Calibration for Ocean Color Climate Change Applications: Requirements for In Situ Data. Remote Sens. Environ. 2015, 159, 361–369. [Google Scholar] [CrossRef]
- Gordon, H.R. Calibration requirements and methodology for remote sensors viewing the ocean in the visible. Remote Sens. Environ. 1987, 22, 103–126. [Google Scholar] [CrossRef]
- Gordon, H.R. Atmospheric correction of ocean color imagery in the Earth observing system era. J. Geophys. Res. 1997, 102, 17081–17106. [Google Scholar] [CrossRef]
- GCOS, Systematic Observation Requirements For Satellite-Based Data Products For Climate, 2011 update, Supplemental details to the satellite-based component of the “Implementation Plan for the Global Observing System for Climate in Support of the UNFCCC (2010 Update)”, December 2011, GCOS-154, WMO-IOC. Available online: https://library.wmo.int/doc_num.php?explnum_id=3710 (accessed on 11 May 2020).
- Antoine, D.; Morel, A. A multiple scattering algorithm for atmospheric correction of remotely-sensed ocean colour (MERIS instrument): Principle and implementation for atmospheres carrying various aerosols including absorbing ones. Int. J. Remote Sens. 1999, 20, 1875–1916. [Google Scholar] [CrossRef]
- Morel, A.; Maritorena, S. Bio-optical properties of oceanic waters: A reappraisal. J. Geophys. Res. 2001, 106, 7763–7780. [Google Scholar] [CrossRef] [Green Version]
- Clark, D.K.; Gordon, H.R.; Voss, K.J.; Ge, Y.; Broenkow, W.; Trees, C. Validation of atmospheric correction over the oceans. J. Geophys. Res. 1997, 102D, 17209–17217. [Google Scholar] [CrossRef]
- Clark, D.K.; Yarbrough, M.A.; Feinholz, M.; Flora, S.; Broenkow, W.; Kim, Y.S.; Johnson, B.C.; Brown, S.W.; Yuen, M.; Mueller, J.L. MOBY, a radiometric buoy for performance monitoring and vicarious calibration of satellite ocean color sensors: Measurement and data analysis protocols. In NASA Ocean Optics Protocols For Satellite Ocean Color Sensor Validation; Chapter 2; Goddard Space Flight Space Center: Greenbelt, MD, USA, 2003; Volume 11, pp. 138–170. [Google Scholar]
- The BOUSSOLE acronym, which is the French word for «compass», translates as «Buoy for the acquisition of a long-term optical time series».
- Antoine, D.; Chami, M.; Claustre, H.; D’Ortenzio, F.; Morel, A.; Bécu, G.; Gentili, B.; Louis, F.; Ras, J.; Roussier, E.; et al. BOUSSOLE: A joint CNRS-INSU, ESA, CNES and NASA Ocean Color Calibration And Validation Activity. NASA Tech. Memo. 2006, 214147. [Google Scholar]
- Pahlevan, N.; Sarkar, S.; Franz, B.A.; Balasubramanian, S.V.; He, J. Sentinel-2 MultiSpectral Instrument (MSI) data processing for aquatic science applications: Demonstrations and validations. Remote Sens. Environ. 2017, 201, 47–56. [Google Scholar] [CrossRef]
- Pahlevan, N.; Balasubramanian, S.; Sarkar, S.; Franz, B. Toward Long-Term Aquatic Science Products from Heritage Landsat Missions. Remote Sens. 2018, 10, 1337. [Google Scholar] [CrossRef] [Green Version]
- Pahlevan, N.; Chittimalli, S.K.; Balasubramanian, S.V.; Vellucci, V. Sentinel-2/Landsat-8 product consistency and implications for monitoring aquatic systems. Remote Sens. Environ. 2019, 220, 19–29. [Google Scholar] [CrossRef]
- Zibordi, G.; Mélin, F.; Talone, M. System Vicarious Calibration for Copernicus Ocean Colour Missions: Requirements and Recommendations for a European Site; Publications Office of the European Union: Brussels, Belgium, 2017. [Google Scholar] [CrossRef]
- Mazeran, C.; Brockmann, C.; Ruddick, K.; Voss, K.J.; Zagolsky, F. Requirements for Copernicus Ocean Colour Vicarious Calibration Infrastructure; EUMETSAT, 2017; SOLVO/EUM/16/VCA/D8; EUMETSAT EUM/CO/16/4600001772/EJK. Available online: https://www.eumetsat.int/website/home/Data/ScienceActivities/ScienceStudies/CopernicusOceanColourVicariousCalibrationInfrastructure/RequirementsforCopernicusOceanColourVicariousCalibrationInfrastructure/index.html?lang=EN#SD (accessed on 11 May 2020).
- Banks, A.C.; Vendt, R.; Alikas, K.; Bialek, A.; Kuusk, J.; Lerebourg, C.; Ruddick, K.; Tilstone, G.; Viktor Vabson, V.; Donlon, C.; et al. Fiducial Reference Measurements for Satellite Ocean Colour (FRM4SOC). Remote Sens. 2020, 12, 1322. [Google Scholar] [CrossRef] [Green Version]
- FRM4SOC D-240, Proceedings of WKP-1 (PROC-1). Report of the International Workshop. 2017. Available online: https://frm4soc.org/wp-content/uploads/filebase/FRM4SOC-WKP1-D240-Workshop_Report_PROC-1_v1.1_signedESA.pdf (accessed on 13 January 2020).
- Zibordi, G.; Mélin, F. An evaluation of marine regions relevant for ocean color system vicarious calibration. Remote Sens. Environ. 2017, 19, 122–136. [Google Scholar] [CrossRef]
- Leymarie, E.; Penkerc’h, C.; Vellucci, V.; Lerebourg, C.; Antoine, D.; Boss, E.; Lewis, M.; D’Ortenzio, F.; Claustre, H. A new autonomous profiling float for high quality radiometric measurements. Front. Mar. Sci. 2018, 5, 437. [Google Scholar] [CrossRef] [Green Version]
- Zhou, P.; Yang, X.-L.; Wang, X.-G.; Hu, B.; Zhang, L.; Zhang, W.; Si, H.-R.; Zhu, Y.; Li, B.; Huang, C.-L.; et al. A pneumonia outbreak associated with a new coronavirus of probable bat origin. Nature 2020, 579, 270–273. [Google Scholar] [CrossRef] [Green Version]
- Maier, B.F.; Brockmann, D. Effective containment explains sub-exponential growth in confirmed cases of recent COVID-19 outbreak in Mainland China. Science 2020. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Antoine, D.; D’Ortenzio, F.; Hooker, S.B.; Bécu, G.; Gentili, B.; Tailliez, D.; Scott, A.J. Assessment of uncertainty in the ocean reflectance determined by three satellite ocean color sensors (MERIS, SeaWiFS and MODIS-A) at an offshore site in the Mediterranean Sea (BOUSSOLE project). J. Geophys. Res. 2008, 113, C07013. [Google Scholar] [CrossRef]
- Vellucci, V.; Antoine, D.; Banks, A.C.; Bardey, P.; Bretagnon, M.; Bruniquel, V.; Deru, A.; Hembise Fanton d’Andon, O.; Lerebourg, C.; Mangin, A.; et al. ROSACE, Radiometry for Ocean Colour SAtellites Calibration & Community Engagement, Preliminary Design Document (PDD-V4.1) EUMETSAT Contract EUM/CO/184600002162/EJK-Order No. 4500017110. 2019. Available online: https://www.eumetsat.int/website/home/Data/ScienceActivities/ScienceStudies/CopernicusOceanColourVicariousCalibrationInfrastructure/PreliminaryDesignProjectPlanandCostingforCopernicusOceanColourVicariousCalibrationInfrastructure/index.html (accessed on 11 May 2020).
- Mayot, N.; D’Ortenzio, F.; Taillandier, V.; Prieur, L.; Pasqueron de Fommervault, O.; Claustre, H.; Bosse, A.; Testor, P.; Conan, P. Impacts of the deep convection on the phytoplankton blooms in temperate seas: A multiplatform approach over a complete annual cycle (2012-2013 DEWEX experiment). J. Geophys. Res. 2017, 122. [Google Scholar] [CrossRef]
- Morel, A.; Prieur, L. Analysis of variations in ocean color. Limnol. Oceanogr. 1977, 22, 709–722. [Google Scholar] [CrossRef]
- Morel, A.; Bélanger, S. Improved Detection of turbid waters from Ocean Color information. Remote Sens. Environ. 2006, 102, 237–249. [Google Scholar] [CrossRef]
- Platnick, S.; Hubanks, P.; Meyer, K.; King, M.D. MODIS Atmosphere L3 Monthly Product (08_L3). NASA MODIS Adaptive Processing System; Goddard Space Flight Center: Greenbelt, MD, USA, 2015. [CrossRef]
- Golbol, M.; Vellucci, V.; Antoine, D. BOUSSOLE Set of Cruises. 2000. Available online: https://campagnes.flotteoceanographique.fr/series/1/ (accessed on 11 May 2020).
- Petihakis, G.; Perivoliotis, L.; Korres, G.; Ballas, D.; Frangoulis, C.; Pagonis, P.; Ntoumas, M.; Pettas, M.; Chalkiopoulos, A.; Sotiropoulou, M.; et al. An integrated open-coastal biogeochemistry, ecosystem and biodiversity observatory of the eastern Mediterranean–the Cretan Sea component of the POSEIDON system. Ocean Sci. 2018, 14, 1223–1245. [Google Scholar] [CrossRef] [Green Version]
- Henson, S.; Beaulieu, C.; Lampitt, R. Observing climate change trends in ocean biogeochemistry: When and where. Glob. Chang. Biol. 2016, 22, 1561–1571. [Google Scholar] [CrossRef] [Green Version]
- POSEIDON: Monitoring, Forecasting and Information System for the Greek Seas. Available online: http://www.poseidon.hcmr.gr (accessed on 24 March 2020).
- Global Ocean Observing System (GOOS) OceanSITES, A Worldwide System of Deepwater Reference Stations. Available online: http://www.oceansites.org/index.html (accessed on 24 March 2020).
- D’Ortenzio, F.; Ribera d’Alcalà, M. On the trophic regimes of the Mediterranean Sea: A satellite analysis. Biogeoscience 2009, 6, 139–148. [Google Scholar] [CrossRef] [Green Version]
- Menna, M.; Poulain, P.-M.; Zodiatis, G.; Gertman, I. On the surface circulation of the Levantine sub-basin derived from Lagrangian drifters and satellite altimetry data. Deep-Sea Res. I 2012, 65, 46–58. [Google Scholar] [CrossRef]
- Theocharis, A.; Balopoulos, E.; Kioroglou, S.; Kontoyiannis, H.; Iona, A. A synthesis of the circulation and hydrography of the South Aegean Sea and the Straits of the Cretan Arc (March 1994–January 1995). Prog. Oceanogr. 1999, 44, 469–509. [Google Scholar] [CrossRef]
- Korres, G.; Ntoumas, M.; Potiris, M.; Petihakis, G. Assimilating Ferry Box data into the Aegean Sea model. J. Mar. Syst. 2014, 140, 59–72. [Google Scholar] [CrossRef]
- Psarra, S.; Tselepides, A.; Ignatiades, L. Primary productivity in the oligotrophic Cretan Sea (NE Mediterranean): Seasonal and interannual variability. Prog. Oceanogr. 2000, 46, 187–204. [Google Scholar] [CrossRef]
- Ignatiades, L. The productive and optical status of the oligotrophic waters of the Southern Aegean Sea (Cretan Sea), Eastern Mediterranean. J. Plank. Res. 1998, 20, 985–995. [Google Scholar] [CrossRef]
- Chronis, G.; Lykousis, V.; Georgopoulos, D.; Zervakis, V.; Stavrakakis, S.; Poulos, S. Suspended particulate matter and nepheloid layers over the southern margin of the Cretan Sea (N.E. Mediterranean): Seasonal distribution and dynamics. Prog. Oceanogr. 2000, 46, 163–185. [Google Scholar] [CrossRef]
- Berthon, J.F.; Mélin, F.; Zibordi, G. Ocean Colour Remote Sensing of the Optically Complex European Seas. In Remote Sensing of the European Seas; Barale, V., Gade, M., Eds.; Springer: Dordrecht, Germany, 2008. [Google Scholar]
- Jerlov, N.G. Marine Optics, 2nd ed.; Elsevier: New York, NY, USA, 1976. [Google Scholar]
- Karageorgis, A.P.; Drakopoulos, P.G.; Psarra, S.; Pagou, K.; Krasakopoulou, E.; Banks, A.C.; Velaoras, D.; Spyridakis, N.; Papathanassiou, E. Particle characterization and composition in the NE Aegean Sea: Combining optical methods and biogeochemical parameters. Cont. Shelf Res. 2017, 149, 96–111. [Google Scholar] [CrossRef]
- Drakopoulos, P.G.; Banks, A.C.; Kakagiannis, G.; Karageorgis, A.P.; Lagaria, A.; Papadopoulou, A.; Psarra, S.; Spyridakis, N.; Zervakis, V. Estimating chlorophyll concentrations in the optically complex waters of the North Aegean Sea from field and satellite ocean colour measurements. In Proceedings of the SPIE Third International Conference on Remote Sensing and Geoinformation of the Environment (RSCy2015), Paphos, Cyprus, 19 June 2015. [Google Scholar]
- Banks, A.C.; Karageorgis, A.; Drakopoulos, P.G.; Psarra, S.; Zeri, C.; Pitta, E.; Papadopoulou, A.; Spyridakis, N. PERSEUS Marine Optics–Ocean Colour in the Aegean Sea. In Proceedings of the PERSEUS 2nd Scientific Workshop, Marrakesh, Morocco, 4 December 2014. [Google Scholar]
- Karageorgis, A.P.; Drakopoulos, P.G.; Chaikalis, S.; Lagaria, A.; Spyridakis, N.; Psarra, S. The LEVECO project bio-optics experiment in the northwestern Levantine Sea: Preliminary results. In Proceedings of the SPIE 11174, Seventh International Conference on Remote Sensing and Geoinformation of the Environment (RSCy2019), Paphos, Cyprus, 27 June 2019. [Google Scholar] [CrossRef]
- Banks, A.C.; Drakopoulos, P.G.; Chaikalis, S.; Spyridakis, N.; Karageorgis, A.P.; Psarra, S.; Taillandier, V.; D’Ortenzio, F.; Sofianos, S.; Durrieu de Madron, X. An in situ optical dataset for working towards fiducial reference measurements based satellite ocean colour validation in the Eastern Mediterranean. In Proceedings of the SPIE, Eighth International Conference on Remote Sensing and Geoinformation of the Environment (RSCy2020), Paphos, Cyprus, 16–18 March 2020. [Google Scholar]
- NASA Aerosol Robotic Network (AERONET), FORTH_CRETE Station. Available online: https://aeronet.gsfc.nasa.gov/cgi-bin/data_display_aod_v3?site=FORTH_CRETE&nachal=2&level=3&place_code=10 (accessed on 22 March 2020).
- Moulin, C.; Lambert, C.E.; Dayan, U.; Masson, V.; Ramonet, M.; Bousquet, P.; Legrand, M.; Balkanski, Y.J.; Guelle, W.; Marticorena, B.; et al. Satellite climatology of african dust transport in the Mediterranean atmosphere. J. Geophys. Res. 1998, 103, 13137–13144. [Google Scholar] [CrossRef]
- Angstrom, A. On the atmospheric transmission of Sun radiation and on dust in the air. Geogr. Ann. 1929, 11, 156–166. [Google Scholar]
- Schuster, G.L.; Dubovik, O.; Holben, B.N. Angstrom exponent and bimodal aerosol size distributions. J. Geophys. Res. 2006, 111. [Google Scholar] [CrossRef] [Green Version]
- Eck, T.; Holben, B.N.; Reid, J.; Dubovik, O.; Smirnov, A.; O’Neill, N.; Slutsker, I.; Kinne, S. Wavelength dependence of the optical depth of biomass burning, urban, and desert dust aerosols. J. Geophys. Res. 1999, 104, 349. [Google Scholar] [CrossRef]
- Westphal, D.; Toon, O. Simulations of microphysical, radiative, and dynamical processes in a continental-scale forest fire smoke plume. J. Geophys. Res. 1991, 96, 379–400. [Google Scholar] [CrossRef]
- Finokalia Station-University of Crete (Greece). Available online: http://finokalia.chemistry.uoc.gr (accessed on 23 March 2020).
- ACTRIS: The European Research Infrastructure for the observation of Aerosol, Clouds and Trace Gases. Available online: https://www.actris.eu (accessed on 23 March 2020).
- ICOS: The Integrated Carbon Observation System, a European Research Infrastructure. Available online: https://www.icos-cp.eu (accessed on 23 March 2020).
- World Meteorological Organisation Global Atmosphere Watch Programme (GAW). Available online: https://community.wmo.int/activity-areas/gaw (accessed on 23 March 2020).
- EMEP (European Monitoring and Evaluation Programme), the Co-operative Programme for Monitoring and Evaluation of the Long Range Transmission of Air Pollutants in Europe. Available online: https://www.emep.int (accessed on 23 March 2020).
- Kouvarakis, G.; Tsigaridis, K.; Kanakidou, M.; Mihalopoulos, N. Temporal variations of surface background ozone over Crete Island in the South-East Mediterranean. J. Geophys. Res. 2000, 105, 4399–4410. [Google Scholar] [CrossRef]
- Kouvarakis, G.; Vrekoussis, M.; Mihalopoulos, N.; Kourtidis, K.; Rappenglueck, B.; Gerasopoulos, E.; Zerefos, C. Spatial and temporal variability of tropospheric ozone (O3) in the boundary layer above the Aegean Sea (eastern Mediterranean). J. Geophys. Res. 2002, 107, 8137. [Google Scholar] [CrossRef]
- Gerasopoulos, E.; Kouvarakis, G.; Vrekoussis, M.; Kanakidou, M.; Mihalopoulos, N. Ozone variability in the marine boundary layer of the Eastern Mediterranean based on 7-year observations. J. Geophys. Res. 2005, 110, D15309. [Google Scholar] [CrossRef] [Green Version]
- Gerasopoulos, E.; Kouvarakis, G.; Vrekoussis, N.; Donoussis, C.; Mihalopoulos, N.; Kanakidou, M. Photochemical ozone production in the Eastern Mediterranean. Atmos. Environ. 2006, 40, 3057–3069. [Google Scholar] [CrossRef]
- Kalivitis, N.; Gerasopoulos, E.; Vrekoussis, M.; Kouvarakis, G.; Kubilay, N.; Hatzianastassiou, N.; Vardavas, I.; Mihalopoulos, N. Dust transport over the eastern Mediterranean derived from Total Ozone Mapping Spectrometer, Aerosol Robotic Network, and surface measurements. J. Geophys. Res. 2007, 112, D03202. [Google Scholar] [CrossRef] [Green Version]
- Kalivitis, N.; Bougiatioti, A.; Kouvarakis, G.; Mihalopoulos, N. Long term measurements of atmospheric aerosol optical properties in the Eastern Mediterranean. Atmos. Res. 2011, 102, 351–357. [Google Scholar] [CrossRef]
- Pandolfi, M.; Alados-Arboledas, L.; Alastuey, A.; Andrade, M.; Angelov, C.; Artiñano, B.; Backman, J.; Baltensperger, U.; Bonasoni, P.; Bukowiecki, N.; et al. A European aerosol phenomenology–6: Scattering properties of atmospheric aerosol particles from 28 ACTRIS sites. Atmos. Chem. Phys. 2018, 18, 7877–7911. [Google Scholar] [CrossRef] [Green Version]
- Antoine, D.; Nobileau, D. Recent increase of Saharan dust transport over the Mediterranean Sea, as revealed from ocean color satellite (SeaWiFS) observations. J. Geophys. Res. 2006, 111, D12214. [Google Scholar] [CrossRef] [Green Version]
- Gkikas, A.; Hatzianastassiou, N.; Mihalopoulos, N. Aerosol events in the broader Mediterranean basin based on 7-year (2000–2007) MODIS C005 data. Ann. Geophys. 2009, 27, 3509–3522. [Google Scholar] [CrossRef]
- Gkikas, A.; Basart, S.; Hatzianastassiou, N.; Marinou, E.; Amiridis, V.; Kazadzis, S.; Pey, J.; Querol, X.; Jorba, O.; Gassó, S.; et al. Mediterranean intense desert dust outbreaks and their vertical structure based on remote sensing data. Atmos. Chem. Phys. 2016, 16, 8609–8642. [Google Scholar] [CrossRef] [Green Version]
- Nobileau, D.; Antoine, D. Detection of blue-absorbing aerosols using near infrared and visible (ocean color) remote sensing observations. Remote Sens. Environ. 2005, 95, 368–387. [Google Scholar] [CrossRef]
- Im, U.; Kanakidou, M. Impacts of East Mediterranean megacity emissions on air quality. Atmos. Chem. Phys. 2012, 12, 6335–6355. [Google Scholar] [CrossRef] [Green Version]
- Vrekoussis, M.; Liakakou, E.; Mihalopoulos, N.; Kanakidou, M.; Crutzen, P.J.; Lelieveld, J. Formation of HNO3 and NO3 in the anthropogenically influenced eastern Mediterranean marine boundary layer. Geophys. Res. Lett. 2006, 33, L05811. [Google Scholar] [CrossRef]
- Vrekoussis, M.; Mihalopoulos, N.; Gerasopoulos, E.; Kanakidou, M.; Crutzen, P.J.; Lelieveld, J. Two-years of NO3 radical observations in the boundary layer over the Eastern Mediterranean. Atmos. Chem. Phys. 2007, 7, 315–327. [Google Scholar] [CrossRef] [Green Version]
- Kalaroni, S.; Tsiaras, K.; Petihakis, G.; Economou-Amilli, A.; Triantafyllou, G. Modelling the Mediterranean pelagic ecosystem using the POSEIDON ecological model. Part I: Nutrients and chlorophyll-a dynamics. Deep-Sea Res. Part II 2020, 171. [Google Scholar] [CrossRef]
- Antoine, D.; Guevel, P.; Desté, J.-F.; Bécu, G.; Louis, F.; Scott, A.J.; Bardey, P. The «BOUSSOLE» buoy A new transparent-to-swell taut mooring dedicated to marine optics: Design, tests and performance at sea. J. Atmos. Ocean. Technol. 2008, 25, 968–989. [Google Scholar] [CrossRef]
- LeBoulluec, M.; Aoustin, Y.; Bigourdan, B. Expertise du Flotteur Boussole, Rapport IFREMER TMSI/RED 02-028; Issy Les Moulineaux, France. 2002. Available online: http://www.obs-vlfr.fr/Boussole/html/technological/rapports/Ifremer-rapport-complet.pdf (accessed on 11 May 2020).
- Hellan, Ø.; Leira, B.; Barrholm, R.; Erling Heggelund, S.; Lie, H. Expert Evaluation of Boussole Buoy Design; Marintek Rep. 700203.00:01; Marintek Rep.: Trondheim, Norway, 2002. [Google Scholar]
- Morel, A.; Claustre, H.; Antoine, D.; Gentili, B. Natural variability of bio-optical properties in Case 1 waters: Attenuation and reflectance within the visible and near-UV spectral domains, as observed in South Pacific and Mediterranean waters. Biogeosciences 2007, 4, 913–925. [Google Scholar] [CrossRef] [Green Version]
- Bricaud, A.; Bosc, E.; Antoine, D. Algal biomass and sea surface temperature in the Mediterranean basin: Intercomparison of data from various satellite sensors, and implications for primary production estimates. Remote Sens. Environ. 2002, 81, 163–178. [Google Scholar] [CrossRef]
- Santoleri, R.; Volpe, G.; Marullo, S.; Nardelli, B.B. Open Waters Optical Remote Sensing of the Mediterranean Sea. In Remote Sensing of the European Seas; Springer: Berlin/Heidelberg, Germany, 2008; pp. 103–116. [Google Scholar]
- Gregg, W.W.; Carder, K.L. A simple spectral solar irradiance model for cloudless maritime atmospheres. Limnol. Oceanogr. 1990, 35, 1657–1675. [Google Scholar] [CrossRef]
- ‘FRM4SOC D-70: Technical Report TR-2, A Review of Commonly Used Fiducial Reference Measurement (FRM) Ocean Colour Radiometers (OCR) used for Satellite Validation’. 2018. Available online: https://frm4soc.org/wp-content/uploads/filebase/FRM4SOC-TR2_TO_signedESA.pdf (accessed on 14 January 2020).
- Woolliams, E.R.; Fox, N.P.; Cox, M.G.; Harris, P.M.; Harrison, N.J. The CCPR K1-a key comparison of spectral irradiance from 250 nm to 2500 nm: Measurements, analysis and results. Metrologia 2006, 43, S98–S104. [Google Scholar] [CrossRef]
- Martin, J.E.; Fox, N.P.; Key, P.J. A Cryogenic Radiometer for Absolute Radiometric Measurements. Metrologia 1985, 21, 147. [Google Scholar] [CrossRef]
- Manov, D.V.; Chang, G.C.; Dickey, T.D. Methods for reducing biofouling of moored optical sensors. J. Atmos. Ocean. Technol. 2004, 21, 958–968. [Google Scholar] [CrossRef] [Green Version]
- Whelan, A.; Regan, F. Antifouling strategies for marine and riverine sensors. J. Environ. Monit. 2006, 8, 880–886. [Google Scholar] [CrossRef] [PubMed]
- Bishop, J.; McKay, H.; Parrott, D.; Allan, J. Review of International Research Literature Regarding the Effectiveness of Auditory Bird Scaring Techniques and Potential Alternatives; Food and Rural Affairs: London, UK, 2003.
- JCGM100. Evaluation of Measurement Data-Guide to the Expression of Uncertainty in Measurement, Guidance Document; BIPM: Saint-Cloud, France, 2008. [Google Scholar]
- Białek, A.; Vellucci, V.; Gentili, B.; Antoine, D.; Gorroño, J.; Fox, N.; Underwood, C. Monte Carlo–based quantification of uncertainties in determining ocean remote sensing reflectance from underwater fixed-depth radiometry measurements. J. Atmos. Ocean. Technol. 2020, 37, 177–196. [Google Scholar] [CrossRef]
- Fidelity and Uncertainty in Climate Data Records from Earth Observations (FIDUCEO). Available online: https://www.fiduceo.eu (accessed on 11 May 2020).
- Mittaz, J.; Merchant, C.J.; Woolliams, E.R. Applying principles of metrology to historical Earth observations from satellites. Metrologia 2019, 56, 032002. [Google Scholar] [CrossRef]
- Białek, A.; Douglas, S.; Kuusk, J.; Ansko, I.; Vabson, V.; Vendt, R.; Casal, T. Example of Monte Carlo Method Uncertainty Evaluation for Above-Water Ocean Colour Radiometry. Remote Sens. 2020, 12, 780. [Google Scholar] [CrossRef] [Green Version]
- Obolensky, G.; Cancouet, R.; Mangin, A.; Poteau, A.; Schmechtig, C.; Thierry, V. Argo Dataset Production: Real-time Data-management and Delayed-mode Qualified Dataset for O2, Chlorophyll-a, Backscattering and NO3; AtlantOS Deliverable: Kiel, Germany, 2019. [Google Scholar]
- Roemmich, D.; Johnson, G.C.; Riser, S.; Davis, R.; Gilson, J.; Owens, W.B.; Garzoli, S.L.; Schmid, C.; Ignaszewski, M. The Argo Program: Observing the global ocean with profiling floats. Oceanography 2009, 22, 34–43. [Google Scholar] [CrossRef] [Green Version]
- Johnson, K.S.; Claustre, H. Bringing Biogeochemistry into the Argo Age. Eos Trans. AGU 2016, 97. [Google Scholar] [CrossRef]
- Gerbi, G.; Boss, E.; Werdell, J.; Proctor, C.W.; Haentjens, N.; Lewis, M.R.; Brown, K.; Sorrentino, D.; Zaneveld, J.R.V.; Barnard, A.H.; et al. Validation of Ocean Color Remote.Sensing Reflectance Using Autonomous Floats. J. Atmos. Ocean. Technol. 2016, 33, 2331–2352. [Google Scholar] [CrossRef]
- Wojtasiewicz, B.; Hardman-Mountford, N.J.; Antoine, D.; Dufois, F.; Slawinski, D.; Trull, T.W. Use of bio-optical profiling float data in validation of ocean colour satellite products in a remote ocean region. Remote Sens. Environ. 2018, 209, 275–290. [Google Scholar] [CrossRef]
- Barnard, A.H.; Boss, E.; Van Dommelen, R.; Plache, B. A new paradigm for ocean color satellite calibration and validation: Accurate measurements of hyperspectral water leaving radiance from autonomous profiling floats (HYPERNAV). In Proceedings of the Ocean Optics Conference 2018, Dubrovnik, Croatia, 7–12 October 2018. [Google Scholar]
- Pla, P.; Tricarico, R. Towards a low cost observing system based on low logistic SeaExplorer glider. IEEE Underw. Technol. 2015, 1–3. [Google Scholar] [CrossRef]
- EUMETSAT, Sentinel-3 Product Notice–OLCI Level-2 Ocean Colour, EUM/OPS-SEN3/TEN/19/1068317, S3.PN-OLCI-L2M.001. March 2019. Available online: https://sentinels.copernicus.eu/web/sentinel/technical-guides/sentinel-3-olci/data-quality-reports (accessed on 13 April 2020).
- Mobley, D.D. Light and Water: Radiative Transfer in Natural Waters; Elsevier: Amsterdam, The Netherlands, 1994. [Google Scholar]




























| N Overpass | SZA | Glint | Cloud | AOT | [TChl-a] | All Criteria | |||
|---|---|---|---|---|---|---|---|---|---|
| GLO | Med | GLO | Med | ||||||
| BOUSSOLE | |||||||||
| N matchup | 149 | 134 | 123 | 80 | 59 | 45 | 74 | 12 | 20 |
| % reduction | 10 | 17 | 46 | 60 | 70 | 50 | 92 | 87 | |
| MSEA | |||||||||
| N matchup | 144 | 144 | 103 | 95 | 57 | 88 | 95 | 32 | 32 |
| % reduction | 0 | 28 | 34 | 60 | 39 | 34 | 78 | 78 | |
| MOBY | |||||||||
| N matchup | 111 | 111 | 81 | 66 | 58 | 74 | 31 | ||
| % reduction | 0 | 27 | 40 | 48 | 33 | 72 | |||
| Elimination Criteria | |||||||||
|---|---|---|---|---|---|---|---|---|---|
| Collocation | Satellite Measurements | Field Measurements | All | ||||||
| Glint | SZA | Clear-sky | [TChl-a] | Buoy Tilt | Wind Speed | 83% rate | 100% rate | ||
| BOUSSOLE | |||||||||
| N matchups | 175 | 133 | 120 | 55 | 88 | 89 | 96 | 29 | 36 |
| % reduction | 24 | 10 | 58 | 34 | 34 | 28 | 78 | 73 | |
| MSEA | |||||||||
| N matchups | 168 | 115 | 115 | 52 | 109 | 98 | 84 | 42 | 52 |
| % reduction | 30 | 0 | 54 | 6 | 14 | 28 | 63 | 55 | |
| Characteristics | Preliminary Specifications |
|---|---|
| Field of view | Radiance half angle: 7° (9° in air) Irradiance: cosine response in fused silica diffuser |
| Detectors | 2048 × 1 CMOS/2048 × 20 Back-thinned CCD |
| Entrance slit | 10 × 750 µm |
| Pixel size | 14 × 200 µm/14 × 14(×64) µm |
| Bandwidth range | 340–1100 nm |
| Spectral sampling | 0.3 nm/pixel |
| Spectral accuracy | 0.2 nm |
| Spectral resolution | 1 nm |
| Stray light | <0.03% @ ± 40 nm from peak |
| Temperature shift | <0.02 nm/°C |
| Acquisition module | 16 bit ADC |
| Integration time | >10 ms |
| Frame rate | Typical 6 Hz- Programmable (remote, depends on spectrometer driver and processing) |
| Power requirements | <5 W without cooling (to be confirmed with real measurement) |
| Housing | Black anodized aluminium |
| Size | 300 mm long (not including connector) 100 mm diameter |
| Weight | <2 kg |
| Operating temperature | −10 to +50 °C |
| SNR | Uncertainty (%) | |||
|---|---|---|---|---|
| 2 s | Ltyp | Lmax | Ltyp | Lmax |
| 683 | 511 | 1797 | 0.211 | 0.057 |
| 665 | 503 | 1772 | 0.214 | 0.058 |
| 560 | 2327 | 7564 | 0.044 | 0.013 |
| 510 | 2216 | 7214 | 0.046 | 0.014 |
| 490 | 2170 | 7069 | 0.047 | 0.014 |
| 443 | 2059 | 6717 | 0.050 | 0.015 |
| 412 | 1982 | 6474 | 0.052 | 0.016 |
| Radiometric source aperture size | Max. 200 mm diameter |
| Monochromatic spectral range | 260–2700 nm |
| Broadband spectral range | 250–2700 nm (equivalent to 3000 K blackbody). |
| Monochromatic typical radiance (radiometric sphere) | Over full spectral range 0.05 W m−2 sr−1 (laser bandwidth)−1 to 5 W m−2 sr−1 (laser bandwidth)−1 Corresponds to input laser power of 10 mW to 1 W |
| Broadband typical radiance | Variable in steps (ten times 10%) spectrally invariant. Max. > 3000 W m−2 sr−1 μm−1 |
| Radiometric accuracy | <0.5% (in air/vacuum) |
| Radiance spatial uniformity | Typically <0.15% PV (application dependent) |
| Radiance temporal stability | <0.1% duration of a measurement |
| Monochromatic source line width | <0.2 pm |
| Monochromatic source tuning step size | <1–5 pm |
| Monochromatic source wavelength calibration | <0.2 pm (PV) |
| Calibrated TVAC-compatible radiance monitor | <0.5% (k = 1) [TBC] |
| Collimator focal length and F/# | 1000 mm and F/5 (max collimated beam size 200 mm diameter) |
| Table Descriptor | How This is Codified | |
|---|---|---|
| Name of effect | A unique name for each source of uncertainty in a term of the measurement function | |
| Affected term in measurement function | Name and standard symbol of affected term | |
| Instruments in the series affected | Identifier of the specific instrument/deployment where this effect matters | |
| Correlation type and form | Temporal within deployment | Forms of correlation described in detail in [96] |
| Temporal between deployments | ||
| Spectral (hyperspectral in-situ) | ||
| Correlation scale | Temporal within deployment | In units of spectral pixels, measurements or deployments in time—what is the scale of the correlation shape? |
| Temporal between deployments | ||
| Spectral (hyperspectral in-situ) | ||
| Channel/band | List of channels affected | OLCI channel names in standard form |
| Error correlation coefficient matrix | OLCI cross-channel correlation matrix | |
| Uncertainty | PDF shape | Functional form of estimated error distribution for the term |
| units | Units in which PDF shape is expressed | |
| magnitude | Value(s) or parameterisation estimating the PDF width | |
| Sensitivity coefficient | Value, equation or parameterisation of sensitivity of measurand to term | |
| OLCI Band (nm) and band (no.) | 400 (1) | 412.5 (2) | 442.5 (3) | 490 (4) | 510 (5) | 560 (6) | 620 (7) | 665 (8) | 673.75 (9) | 681.25 (10) |
| Current BOUSSOLE radiometers | 3.5 | 3.2 | 3.1 | 3.1 | 3.3 | 3.2 | 3.8 | 4.3 | 4.9 | 4.9 |
| Anticipated new ROSACE radiometers | 2.8 | 2.4 | 2.3 | 2.3 | 2.6 | 2.5 | 3.1 | 3.8 | 4.6 | 4.6 |
| PHASE | Q1 | Q2 | Q3 |
|---|---|---|---|
| NRT | u% < 3 | 3 ≤ u% ≤ 5 | u% > 5 |
| DM | u% < 3 | 3 ≤ u% ≤ 5 | u% > 5 |
| AM | u% < 3 | 3 ≤ u% ≤ 5 | u% > 5 |
| Mission ID | Deployment Start Date | Area | Number of Profiles | Matchups Ratio |
|---|---|---|---|---|
| Lovapm006f | 09/06/2017 | BOUSSOLE | 81 | 29% |
| Lovapm006h | 11/06/2018 | Ionian Sea | 101 | 18% |
| Lovapm006i | 26/09/2019 | MSEA | 35 | 23% |
© 2020 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Antoine, D.; Vellucci, V.; Banks, A.C.; Bardey, P.; Bretagnon, M.; Bruniquel, V.; Deru, A.; Hembise Fanton d’Andon, O.; Lerebourg, C.; Mangin, A.; et al. ROSACE: A Proposed European Design for the Copernicus Ocean Colour System Vicarious Calibration Infrastructure. Remote Sens. 2020, 12, 1535. https://doi.org/10.3390/rs12101535
Antoine D, Vellucci V, Banks AC, Bardey P, Bretagnon M, Bruniquel V, Deru A, Hembise Fanton d’Andon O, Lerebourg C, Mangin A, et al. ROSACE: A Proposed European Design for the Copernicus Ocean Colour System Vicarious Calibration Infrastructure. Remote Sensing. 2020; 12(10):1535. https://doi.org/10.3390/rs12101535
Chicago/Turabian StyleAntoine, David, Vincenzo Vellucci, Andrew C. Banks, Philippe Bardey, Marine Bretagnon, Véronique Bruniquel, Alexis Deru, Odile Hembise Fanton d’Andon, Christophe Lerebourg, Antoine Mangin, and et al. 2020. "ROSACE: A Proposed European Design for the Copernicus Ocean Colour System Vicarious Calibration Infrastructure" Remote Sensing 12, no. 10: 1535. https://doi.org/10.3390/rs12101535