Active Learning for Recognition of Shipwreck Target in Side-Scan Sonar Image


Abstract
:1. Introduction
2. Feature Extraction and Selection Methods
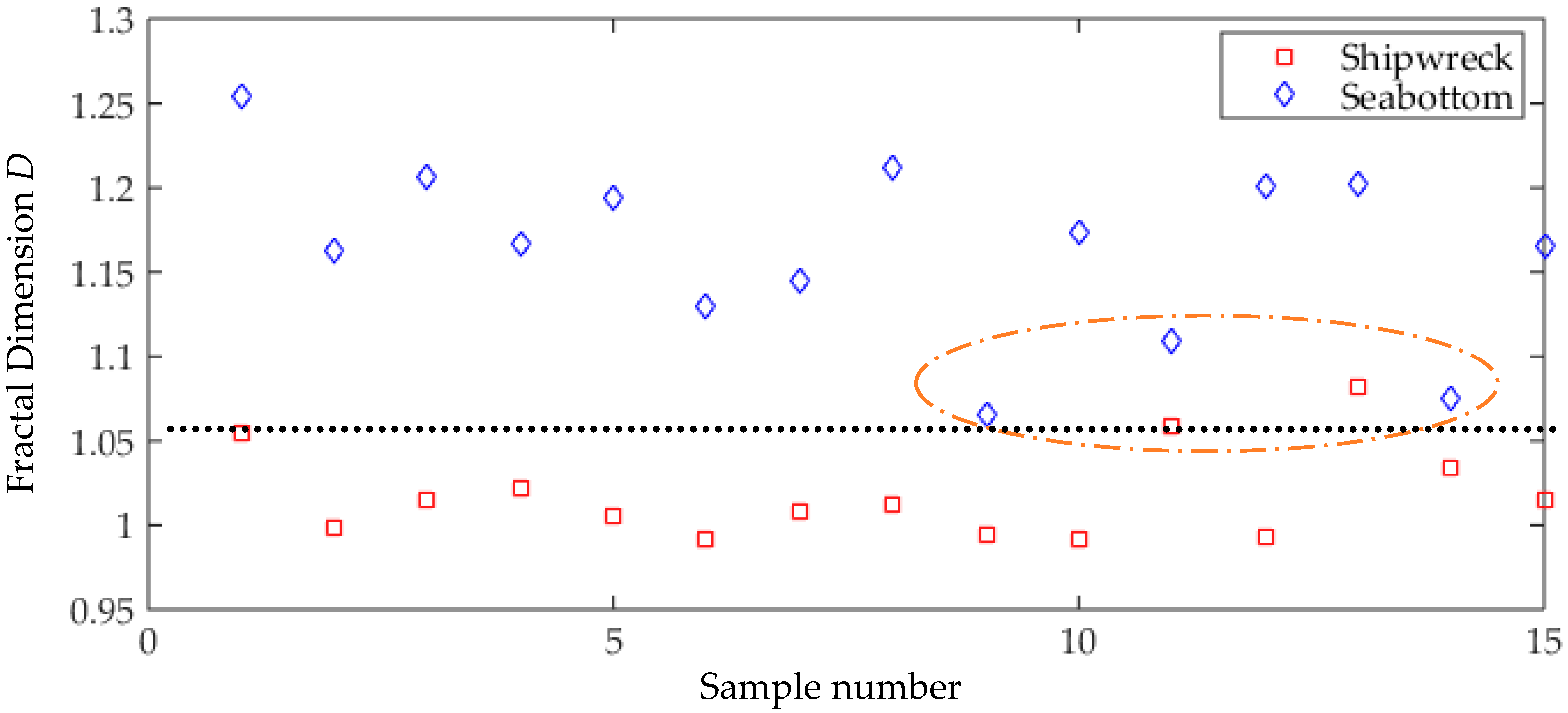
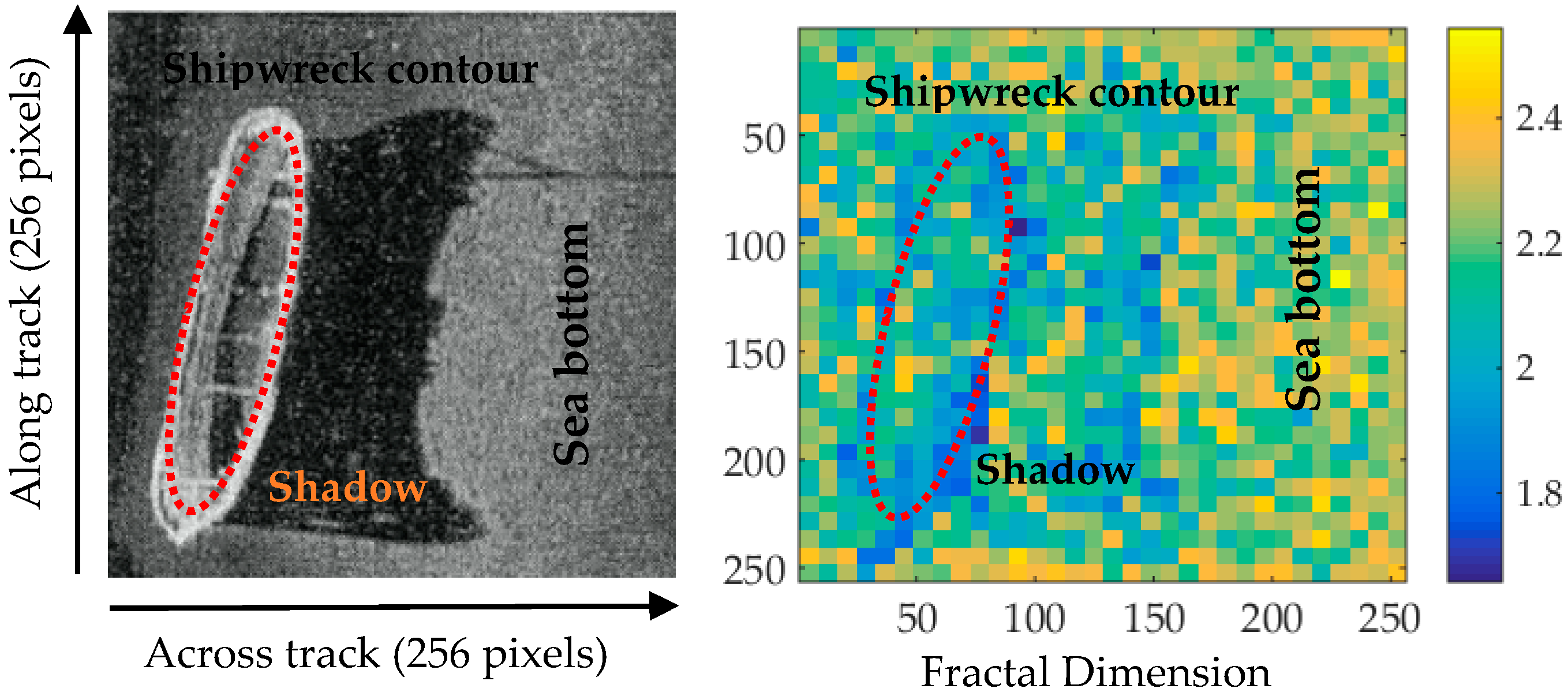
2.1. Fractal Geometry
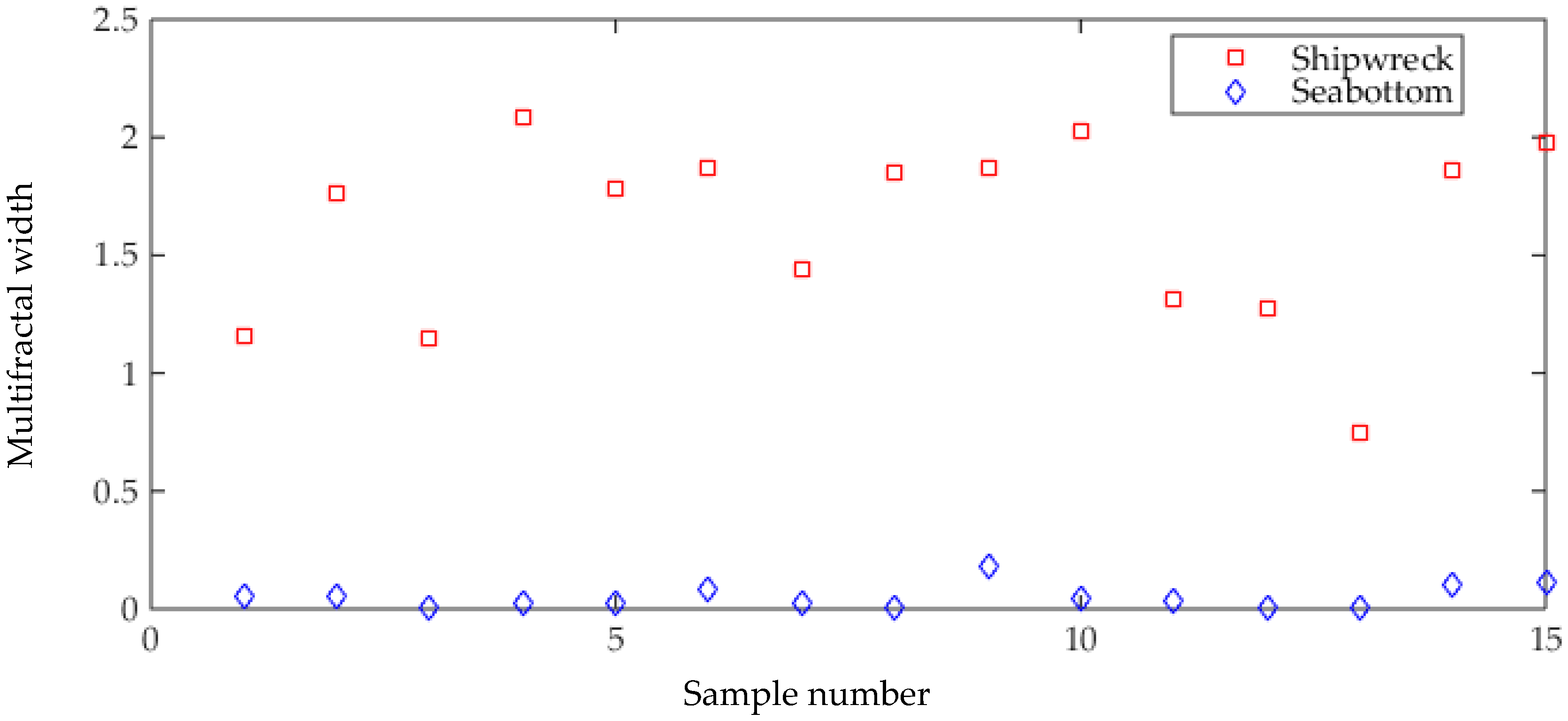
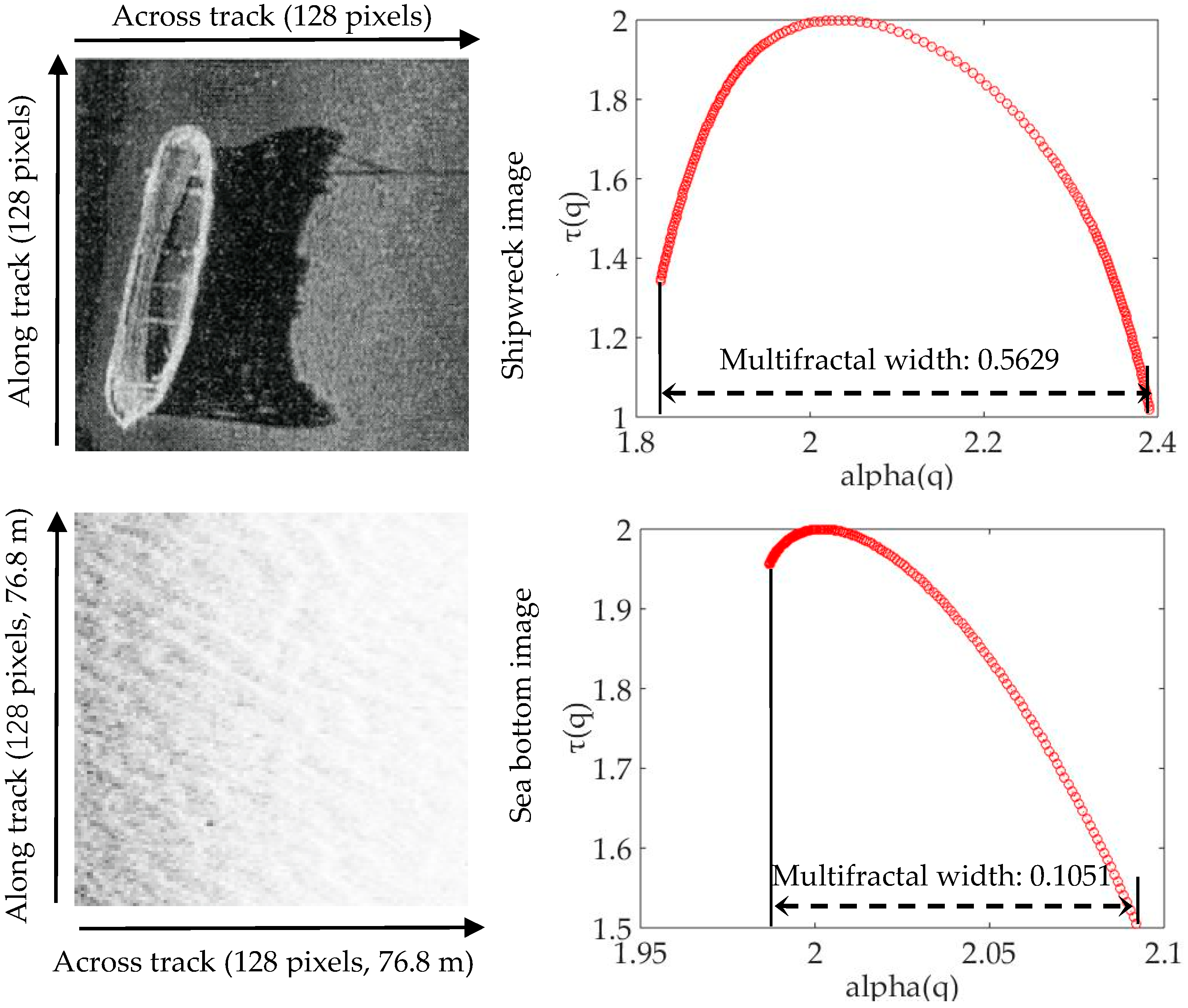
2.2. Multifractal Features
2.3. Feature Selection Methods
3. Recognition Models
3.1. Recognition Models
| Algorithm 1 The flowchart of the AdaBoost. |
| 1. Input: a set of training samples with labels y, (x1, y1), (x2, y2), …, (xm, ym), x is the feature set, m is the sample number; a component learn algorithm; the number of cycles T. |
| 2. Initialize: the weights of training samples: , for j = 1, 2, …, m. |
3. Do for t = 1, 2, …, T.
|
| 4. Output: . |
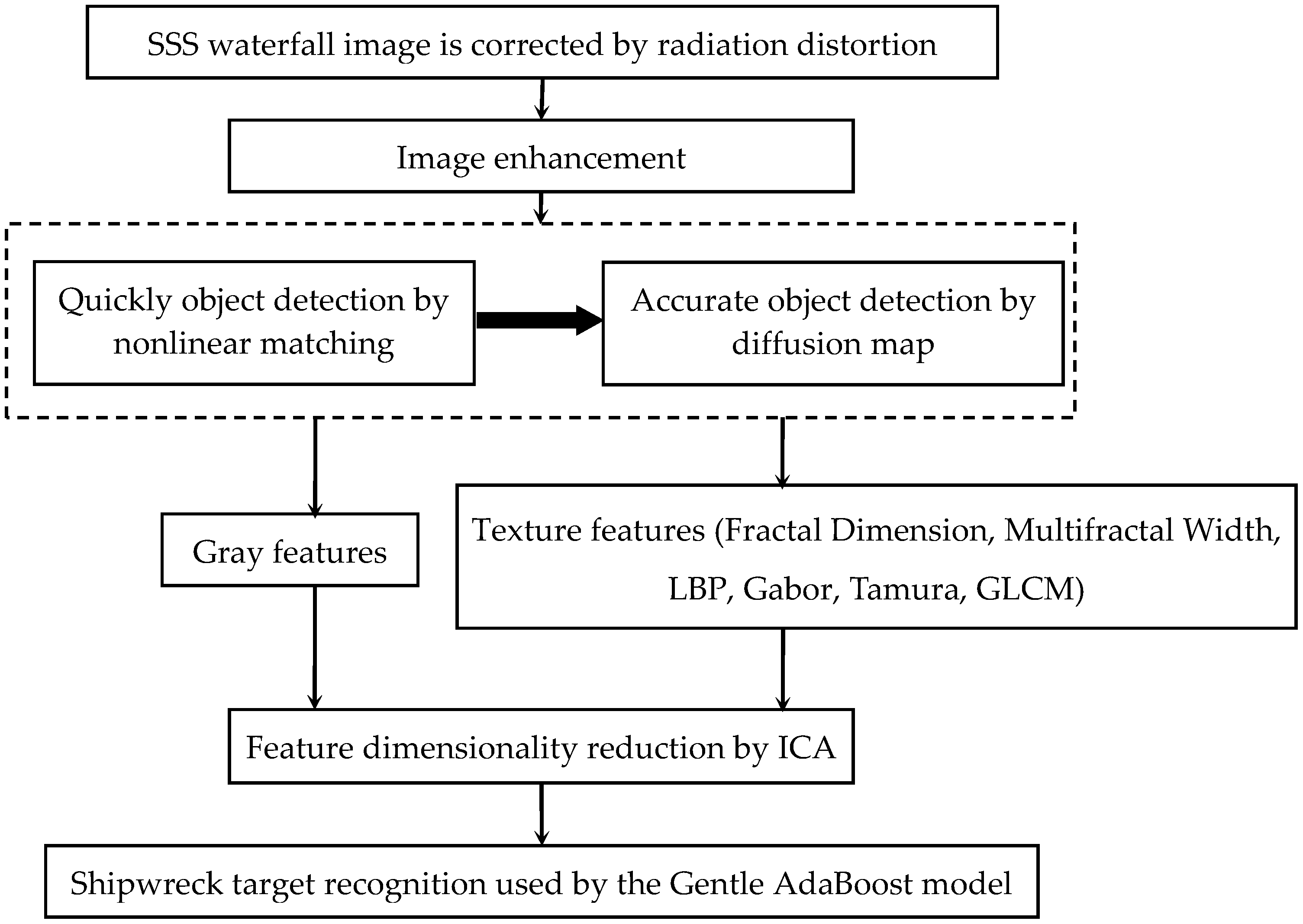
3.2. Flow Chart of the Shipwreck Target Recognition in SSS Waterfall Images
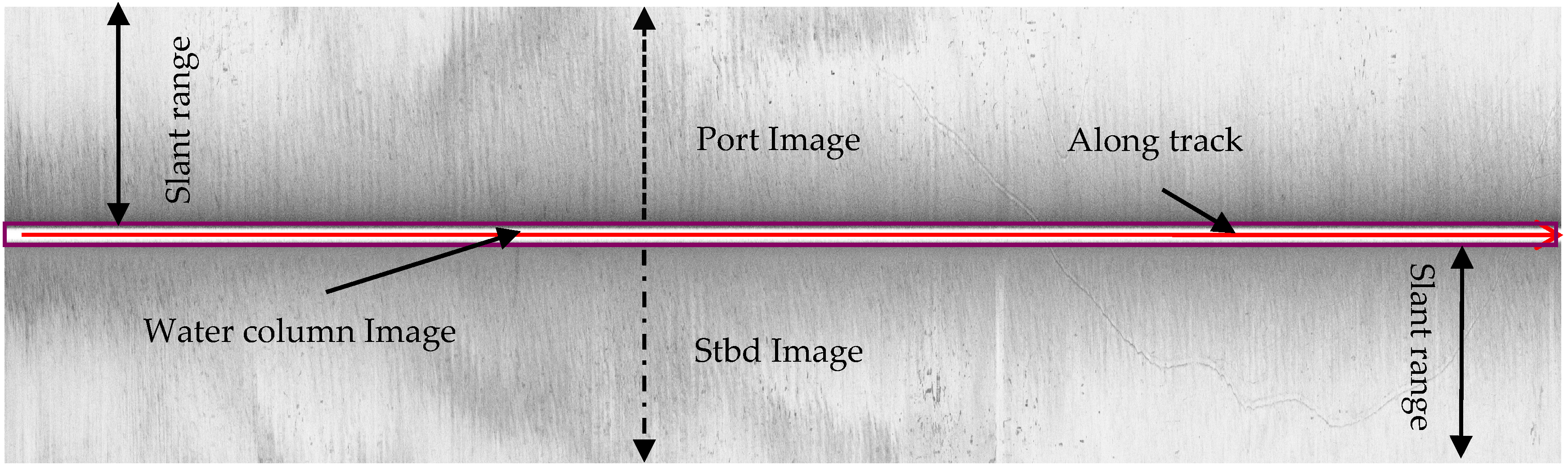
3.2.1. SSS Image Pre-Processing
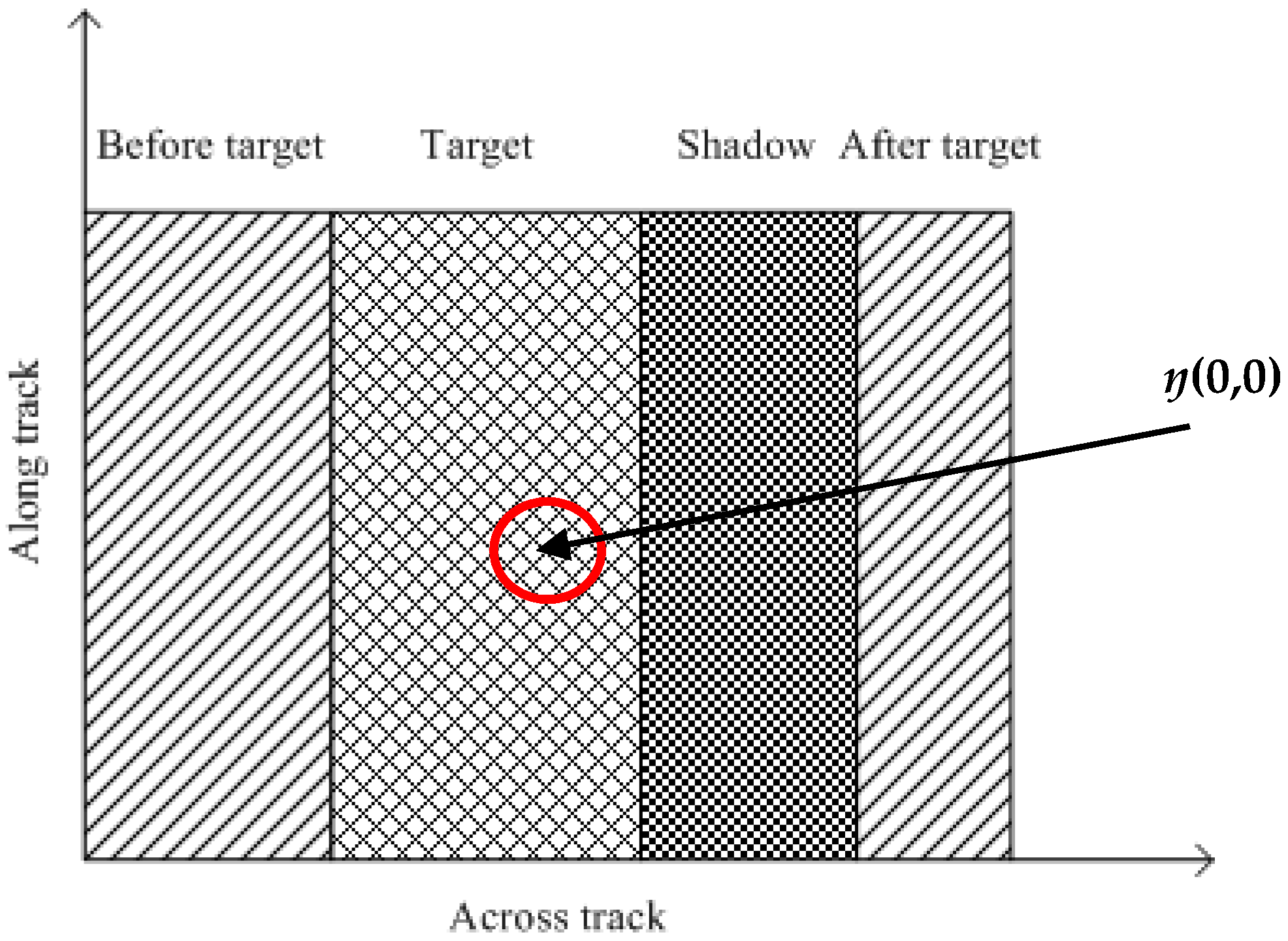
3.2.2. A Nonlinear Matching Model for Target Detection
3.2.3. Diffusion Map
4. Results
- (1)
- Correct recognition rate: the ratio of all correctly recognized samples to the total test samples, represented by tp:
- (2)
- False positive rate: The ratio of the negative samples recognized as positive samples to the total negative samples, represented by fp:
- (3)
- Missing detection rate: The ratio of the positive samples mistakenly recognized as negative samples to the total positive samples, represented by tn:
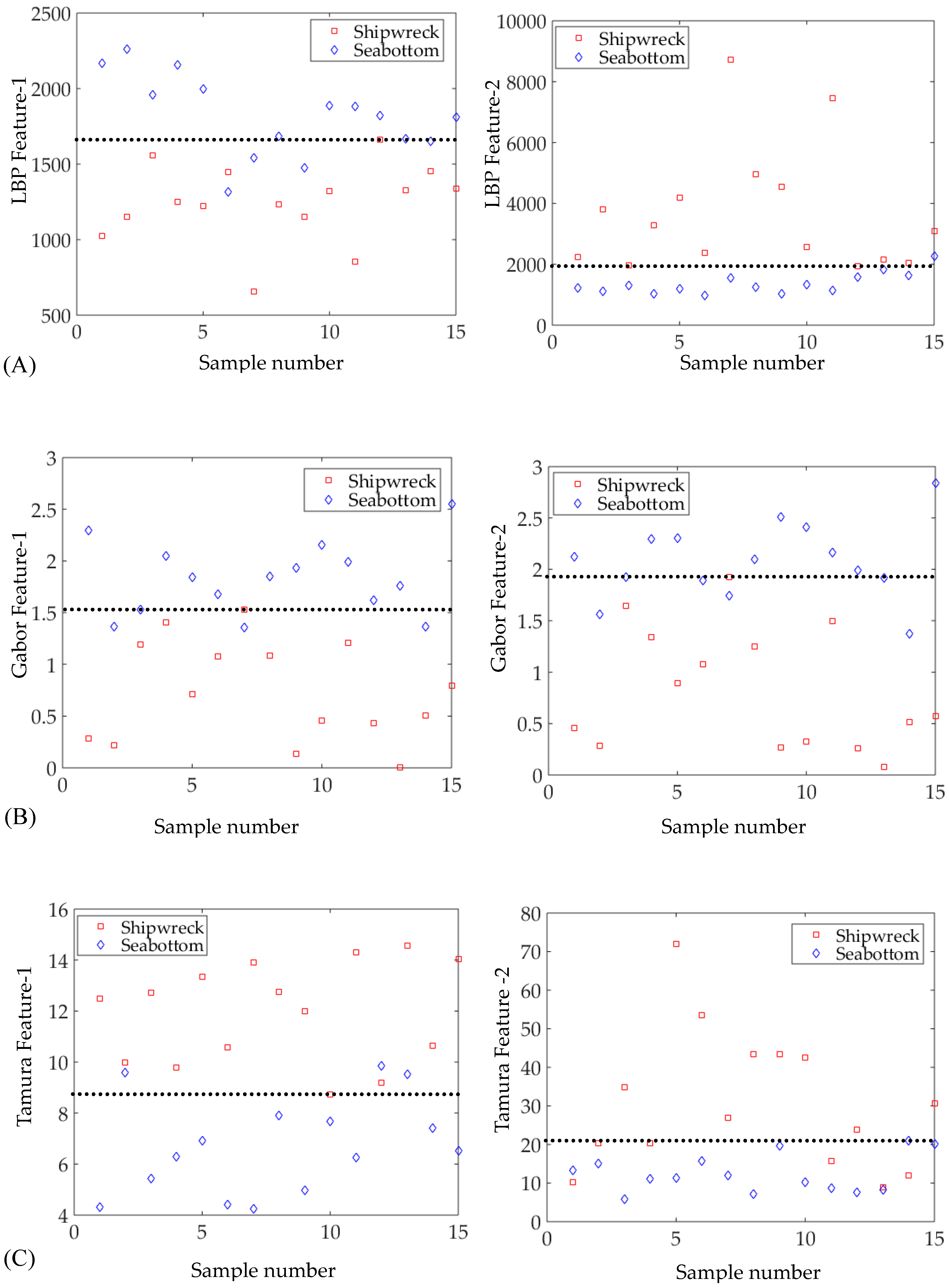
4.1. Analysis of Typical Features for Shipwreck Targets
4.2. The Optimal Recognition Model Construction Algorithm
4.3. Shipwreck Target Recognition Model Construction
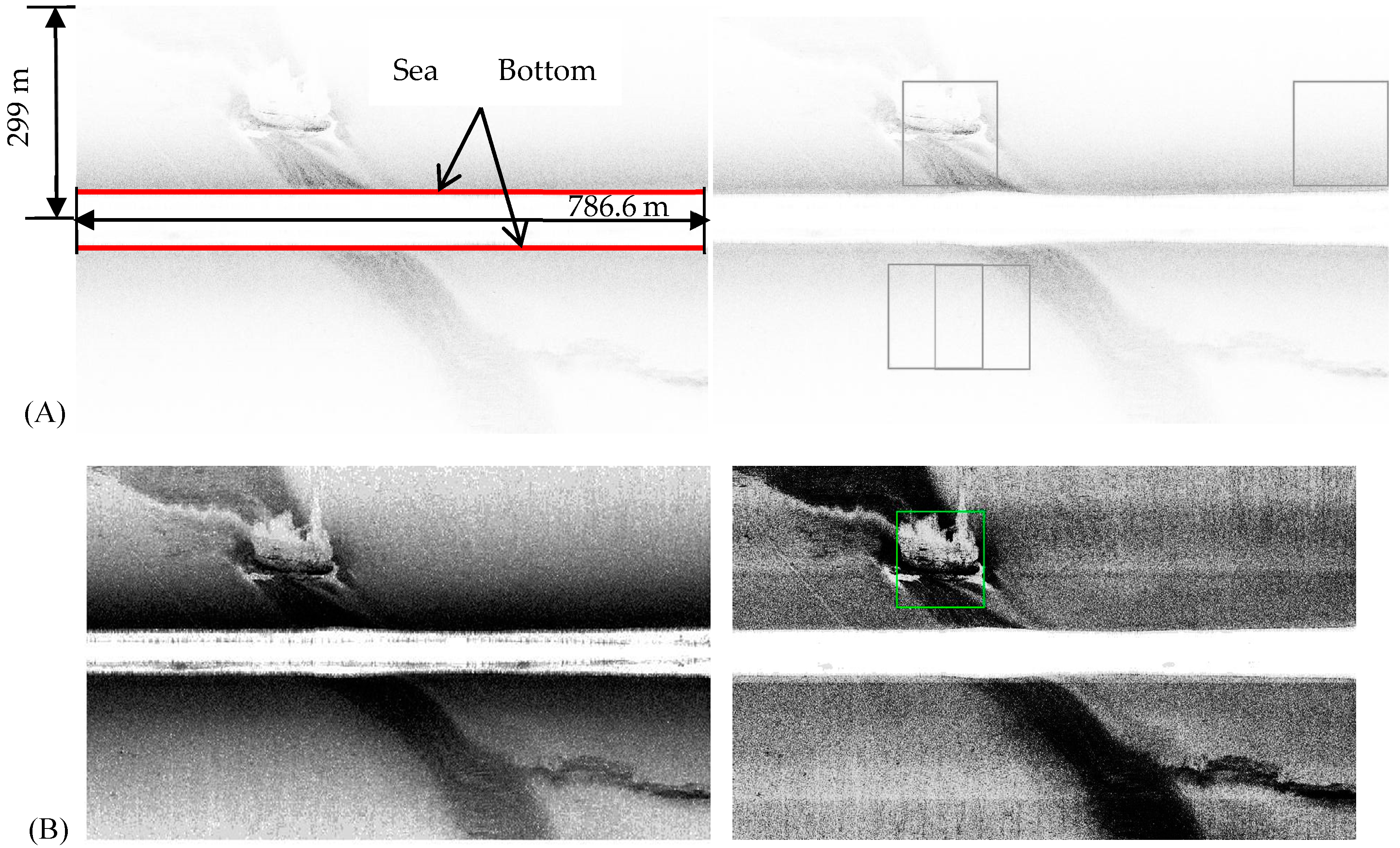
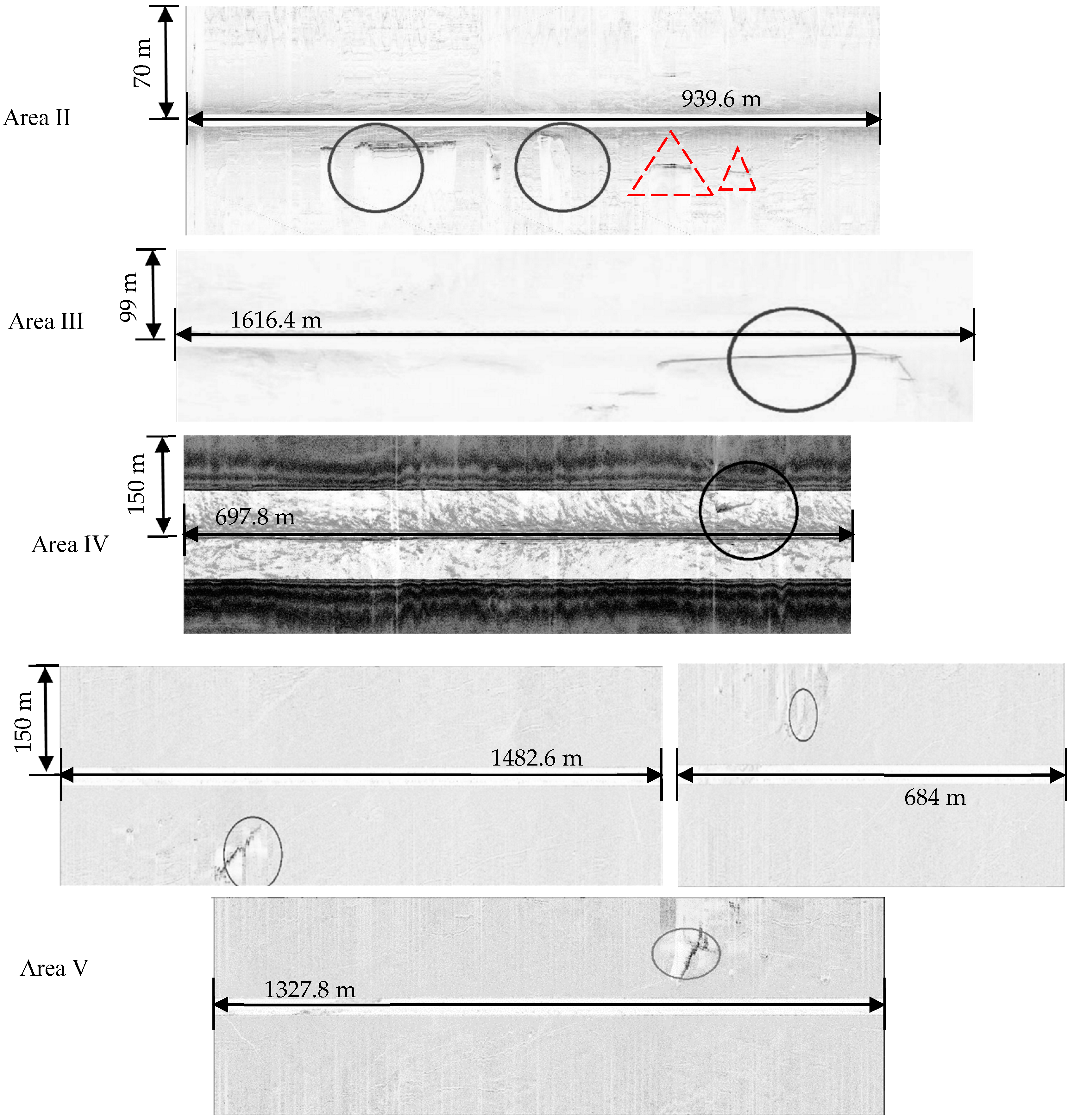
4.4. Shipwreck Target Recognition in Actual Measured SSS Waterfall Images
5. Discussion
5.1. The Effect of Nonlinear Matching Model used for Quick Object Detection
5.2. The Features and Shipwreck Recognition Model (AdaBoost) Used in the Current Process
6. Conclusions
Author Contributions
Funding
Conflicts of Interest
References
- Healy, C.A.; Schultz, J.J.; Parker, K.; Lowers, B. Detecting Submerged Bodies: Controlled Research Using Side-Scan Sonar to Detect Submerged Proxy Cadaver. J. Forensic Sci. 2015, 60, 743–752. [Google Scholar] [CrossRef] [PubMed]
- Kumagai, H.; Tsukioka, S.; Yamamoto, H.; Tsuji, T.; Shitashima, K.; Asada, M.; Yamamoto, F.; Kinoshita, M. Hydrothermal plumes imaged by high-resolution side-scan sonar on a cruising AUV, Urashima. Geochem. Geophys. Geosyst. 2010, 11, 1–8. [Google Scholar] [CrossRef]
- Davy, C.M.; Fenton, M.B. Technical note: Side-scan sonar enables rapid detection of aquatic reptiles in turbid lotic systems. Eur. J. Wildl. Res. 2013, 59, 123–127. [Google Scholar] [CrossRef]
- Bryant, R. Side Scan Sonar for Hydrography-An Evaluation by the Canadian Hydrographic Service. Int. Hydrogr. Rev. 2015, 52, 243–249. [Google Scholar]
- Flowers, H.J.; Hightower, J.E. A novel approach to surveying sturgeon using side-scan sonar and occupancy modeling. Mar. Coast. Fish. 2013, 5, 211–223. [Google Scholar] [CrossRef]
- Nakamura, K.; Toki, T.; Mochizuki, N.; Asada, M.; Ishibashi, J.I.; Nogi, Y.; Yoshikawa, S.; Miyazaki, J.I.; Okino, K. Discovery of a new hydrothermal vent based on an underwater, high-resolution geophysical survey. Deep Sea Res. Part I: Oceanogr. Res. Pap. 2013, 74, 1–10. [Google Scholar] [CrossRef]
- Ramirez, T.M. Triton-Sidescan Processing Guide—Software Version 7.6; Triton Imaging Inc.: Capitola, CA, USA, 2014; pp. 6–7. [Google Scholar]
- Dobeck, G.J.; Hyland, J.C. Automated detection and classification of sea mines in sonar imagery. In Detection and Remediation Technologies for Mines and Minelike Targets II; International Society for Optics and Photonics: Bellingham, WA, USA, 1997; pp. 90–110. [Google Scholar]
- Dobeck, G.J. Algorithm fusion for the detection and classification of sea mines in the very shallow water region using side-scan sonar imagery. In Detection and Remediation Technologies for Mines and Minelike Targets V; International Society for Optics and Photonics: Bellingham, WA, USA, 2000; pp. 348–361. [Google Scholar]
- Reed, S.; Petillot, Y.; Bell, J. An automatic approach to the detection and extraction of mine features in sidescan sonar. IEEE J. Ocean. Eng. 2003, 28, 90–105. [Google Scholar] [CrossRef] [Green Version]
- Langner, F.; Knauer, C.; Jans, W.; Ebert, A. Side Scan Sonar Image Resolution and Automatic Object Detection, Classification and Identification. In Proceedings of the OCEANS 2009—Europe Conference, Bremen, Germany, 11–14 May 2009. [Google Scholar]
- Isaacs, J.C. Sonar automatic target recognition for underwater UXO remediation. In Proceedings of the 2015 IEEE Conference on Computer Vision and Pattern Recognition Workshops (CVPRW), Boston, MA, USA, 7–12 June 2015; pp. 134–140. [Google Scholar]
- Guo, H.; Tian, T. A Recognizing Method Based on Fuzzy Clustering on the Sonar Image of a Small Target on the Sea Bed. J. Chin. Comput. Syst. 2002, 23, 139–141. [Google Scholar]
- Wang, B. Research on Sonar Image Processing and Target Recognition. Master’s Thesis, Northwest Normal University, Lanzhou, China, 2005. [Google Scholar]
- Yang, F.; Du, Z.; Wu, Z. Object Recognizing on Sonar Image Based on Histogram and Geometric Feature. Mar. Sci. Bull. 2006, 25, 64–69. [Google Scholar]
- Ma, M. Study on Under Water Target Recognition Technique. Master’s Thesis, Harbin Engineering University, Harbin, China, 2007. [Google Scholar]
- Tang, C. Research on Multi-resolution Analysis and Recognition of Underwater Targets Acoustic Image. Ph.D. Thesis, Harbin Engineering University, Harbin, China, 2009. [Google Scholar]
- Nayak, S.R.; Mishra, J.; Palai, G. A modified approach to estimate fractal dimension of gray scale images. Optik 2018, 161, 136–145. [Google Scholar] [CrossRef]
- Nelson, S.R.; Tuovila, S.M. Fractal Features Used with Nearest Neighbor Clustering for Identifying Clutter in Sonar Images. U.S. Patent US 6,052,485, 18 April 2000. [Google Scholar]
- Tin, H.W.; Leu, S.W.; Wen, C.C.; Chang, S.H. An efficient side scan sonar image denoising method based on a new roughness entropy fractal dimension. In Proceedings of the 2013 IEEE International Underwater Technology Symposium (UT), Tokyo, Japan, 5–8 March 2013; pp. 1–5. [Google Scholar]
- Islam, A.; Reza, S.M.; Iftekharuddin, K.M. Multifractal texture estimation for detection and segmentation of brain tumors. IEEE Trans. Biomed. Eng. 2013, 60, 3204–3215. [Google Scholar] [CrossRef] [PubMed]
- Lopes, R.; Betrouni, N. Fractal and multifractal analysis: A review. Med. Image Anal. 2009, 13, 634–649. [Google Scholar] [CrossRef] [PubMed]
- Hasan, M.K.; Sakib, N.; Field, J.; Love, R.R.; Ahamed, S.I. Bild (big image in less dimension): A novel technique for image feature selection to apply partial least square algorithm. In Proceedings of the 2017 IEEE Great Lakes Biomedical Conference (GLBC), Milwaukee, WI, USA, 6–7 April 2017; pp. 1–10. [Google Scholar]
- Chizi, B.; Maimon, O. Dimension Reduction and Feature Selection. J. Appl. Entomol. 2016, 140, 444–452. [Google Scholar]
- Fakiris, E.; Papatheodorou, G.; Geraga, M.; Ferentinos, G. An Automatic Target Detection Algorithm for Swath Sonar Backscatter Imagery, Using Image Texture and Independent Component Analysis. Remote Sens. 2016, 8, 373. [Google Scholar] [CrossRef]
- Guo, G.; Wang, H.; Bell, D.; Bi, Y.; Greer, K. KNN Model-Based Approach in Classification. In Otm Confederated International Conferences on the Move to Meaningful Internet Systems; Springer: Berlin/Heidelberg, Germany, 2003; pp. 986–996. [Google Scholar]
- Cutler, D.R.; Edwards, T.C., Jr.; Beard, K.H.; Cutler, A.; Hess, K.T.; Gibson, J.; Lawler, J.J. Random Forests for Classification in Ecology. Ecology 2007, 88, 2783–2792. [Google Scholar] [CrossRef] [PubMed]
- Matic-Cuka, B.; Kezunovic, M. Islanding Detection for Inverter-Based Distributed Generation Using Support Vector Machine Method. IEEE Trans. Smart Grid 2017, 5, 2676–2686. [Google Scholar] [CrossRef]
- Bi, J.; Chen, J.; Yang, S.; Li, C.; Wang, J.; Zhang, B. A Face Detection Method Based on LAB and Adaboost. In Proceedings of the 2016 International Conference on Virtual Reality and Visualization (ICVRV), Hangzhou, China, 24–26 September 2017; pp. 175–178. [Google Scholar]
- Wang, X.; Zhao, J.; Zhu, B.; Jiang, T.; Qin, T. A Side Scan Sonar Image Target Detection Algorithm Based on a Neutrosophic Set and Diffusion Maps. Remote Sens. 2018, 10, 295. [Google Scholar] [CrossRef]
- Zhao, J.; Yan, J.; Zhang, H.; Meng, J. A New Radiometric Correction Method for Side-Scan Sonar Images in Consideration of Seabed Sediment Variation. Remote Sens. 2017, 9, 575. [Google Scholar] [CrossRef]
- Mishne, G.; Cohen, I. Multiscale anomaly detection using diffusion maps and saliency score. In Proceedings of the IEEE International Conference in Acoustics, Speech and Signal Processing (ICASSP), Florence, Italy, 4–9 May 2014; pp. 2823–2827. [Google Scholar]
- Zhao, J.; Wang, X.; Zhang, H.; Hu, J.; Jian, X. Side scan sonar image segmentation based on neutrosophic set and quantum-behaved particle swarm optimization algorithm. Mar. Geophys. Res. 2016, 37, 229–241. [Google Scholar] [CrossRef]
- Singh, G.; Chhabra, I. Effective and Fast Face Recognition System Using Complementary OC-LBP and HOG Feature Descriptors with SVM Classifier. J. Inf. Technol. Res. 2018, 11, 91–110. [Google Scholar] [CrossRef]
- Uijlings, J.R.; Van De Sande, K.E.; Gevers, T.; Smeulders, A.W. Selective Search for Object Recognition. Int. J. Comput. Vis. 2013, 104, 154–171. [Google Scholar] [CrossRef] [Green Version]
- Zhao, Z.B.; Zhang, L.; Qi, Y.C.; Shi, Y.Y. A Generation Method of Insulator Region Proposals Based on Edge Boxes. Optoelectron. Lett. 2017, 13, 466–470. [Google Scholar] [CrossRef]
- Chen, F.C.; Jahanshahi, M.R. NB-CNN: Deep Learning-Based Crack Detection Using Convolutional Neural Network and Naïve Bayes Data Fusion. IEEE Trans. Ind. Electron. 2018, 65, 4392–4400. [Google Scholar] [CrossRef]











{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| kNN |
|---|
| 1. Calculate the distance between the current point and the point in the known category data set; 2. Sorting these points according to Lp distance, if p = 2, this is Euclidean distance; 3. Select the smallest k points from the current point; 4. Determine the frequency of occurrence of the previous k points; 5. Return to the category with the highest frequency of occurrences at the previous k points as the forecast classification result. |
| True | False | |
|---|---|---|
| Positive | True Positve (TP) | False Positive (FP) |
| Negative | True Negative (TN) | False Negative (FN) |
| Feature − D | Correct Recognition Rate (%) | False Positive Rate (%) | Missed Detection Rate (%) |
|---|---|---|---|
| Gentle AdaBoost | 92.31 | 6.25 | 6.67 |
| kNN | 92.31 | 6.25 | 6.67 |
| SVM | 63.89 | 6.25 | 0 |
| RF | 92.31 | 6.25 | 6.67 |
| Feature − Multifractal Width | Correct Recognition Rate (%) | False Positive Rate (%) | Missed Detection Rate (%) |
|---|---|---|---|
| Gentle AdaBoost | 94.87 | 3.13 | 6.67 |
| kNN | 94.87 | 3.13 | 4.29 |
| SVM | 97.44 | 0 | 4.29 |
| RF | 94.87 | 3.13 | 4.29 |
| Feature − Mean Gray Level | Correct Recognition Rate (%) | False Positive Rate (%) | Missed Detection Rate (%) |
|---|---|---|---|
| Gentle AdaBoost | 31.25 | 91.18 | 14.29 |
| kNN | 25 | 79.41 | 64.29 |
| SVM | 35.42 | 76.47 | 35.71 |
| RF | 25 | 79.41 | 64.29 |
| Feature − CGRAY | Correct Recognition Rate (%) | False Positive Rate (%) | Missed Detection Rate (%) |
|---|---|---|---|
| Gentle AdaBoost | 58.33 | 50.00 | 21.43 |
| kNN | 25 | 79.41 | 64.29 |
| SVM | 29.17 | 100 | 0 |
| RF | 64.58 | 47.06 | 7.14 |
| Features − GLCM + CGRAY | Correct Recognition Rate (%) | False Positive Rate (%) | Missed Detection Rate (%) |
|---|---|---|---|
| Gentle AdaBoost | 92.3077 | 3.13 | 28.57 |
| kNN | 92.3077 | 9.38 | 0 |
| SVM | 94.8718 | 3.13 | 14.29 |
| RF | 92.3077 | 3.13 | 28.57 |
| Features − GLCM + CGRAY + Multifractal Width | Correct Recognition Rate (%) | False Positive Rate (%) | Missed Detection Rate (%) |
|---|---|---|---|
| Gentle AdaBoost | 94.8718 | 0 | 6.7 |
| kNN | 92.3077 | 9.38 | 0 |
| SVM | 94.4539 | 0 | 14.29 |
| RF | 94.8718 | 0 | 28.57 |
| Correct Recognition Rate (%) | False Positive Rate (%) | Missed Detection Rate (%) | |
|---|---|---|---|
| Comprehensive Feature | 92.31 | 3.13 | 28.57 |
| PCA Feature extraction | 82.05 | 0 | 100 |
| ICA Feature extraction | 97.44 | 3.13 | 0 |
| Instruments’ Type | Slant Range (m) | Experiment Areas | Resolution (m) | |
|---|---|---|---|---|
| I | Benthos SIS 1624 | 299 | East China Sea | 0.6 |
| II | EdgeTech 4200 | 70 | Shenzhen Bay | 0.6 |
| III | Benthos SIS 1624 | 99 | South of Bohai | 0.6 |
| IV | EdgeTech 4200 | 150 | North of Bohai | 0.6 |
| V | EdgeTech 4200 | 150 | West of Bohai | 0.6 |
© 2019 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Zhu, B.; Wang, X.; Chu, Z.; Yang, Y.; Shi, J. Active Learning for Recognition of Shipwreck Target in Side-Scan Sonar Image. Remote Sens. 2019, 11, 243. https://doi.org/10.3390/rs11030243
Zhu B, Wang X, Chu Z, Yang Y, Shi J. Active Learning for Recognition of Shipwreck Target in Side-Scan Sonar Image. Remote Sensing. 2019; 11(3):243. https://doi.org/10.3390/rs11030243
Chicago/Turabian StyleZhu, Bangyan, Xiao Wang, Zhengwei Chu, Yi Yang, and Juan Shi. 2019. "Active Learning for Recognition of Shipwreck Target in Side-Scan Sonar Image" Remote Sensing 11, no. 3: 243. https://doi.org/10.3390/rs11030243