Improving the GNSS-R Specular Reflection Point Positioning Accuracy Using the Gravity Field Normal Projection Reflection Reference Surface Combination Correction Method

Abstract
:
1. Introduction
2. Materials and Methods
2.1. Data
2.1.1. TechDemoSat-1 Space GPS Receiver Remote Sensing Instrument Data
- Applying the coordinate transformation to scale the WGS-84 ellipsoid to a sphere of unit radius in polar and equatorial axes independently. The positions of the transmitter and the receiver are scaled to the new coordinate system by the same transformation.
- Then the specular reflection point position is calculated using the standard sphere as the reflection reference surface.
- The inverse of the coordinate transform is applied to scale back to the original ellipsoid.
2.1.2. Earth Gravitational Model 2008
2.2. Methodologies
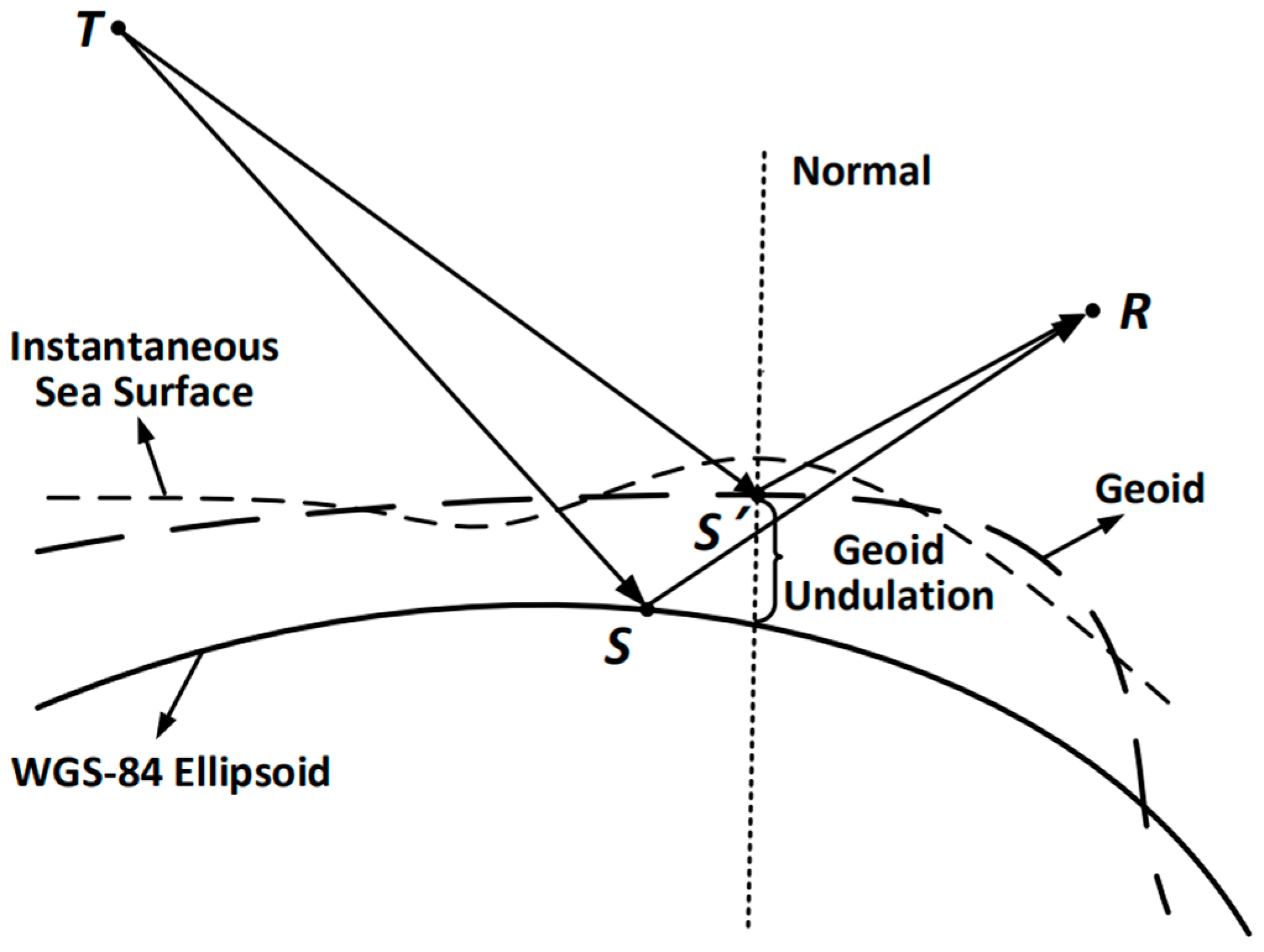
2.2.1. The Gravity Field Reflection Reference Surface Correction Method (GFRRSCM)
YS = (NS + HS)cos(BS)sin(LS) = NScos(BS)sin(LS) + σy
ZS = (NS (1 − e2) + HS)sin(BS) = NS(1 − e2) sin(BS) + σz,
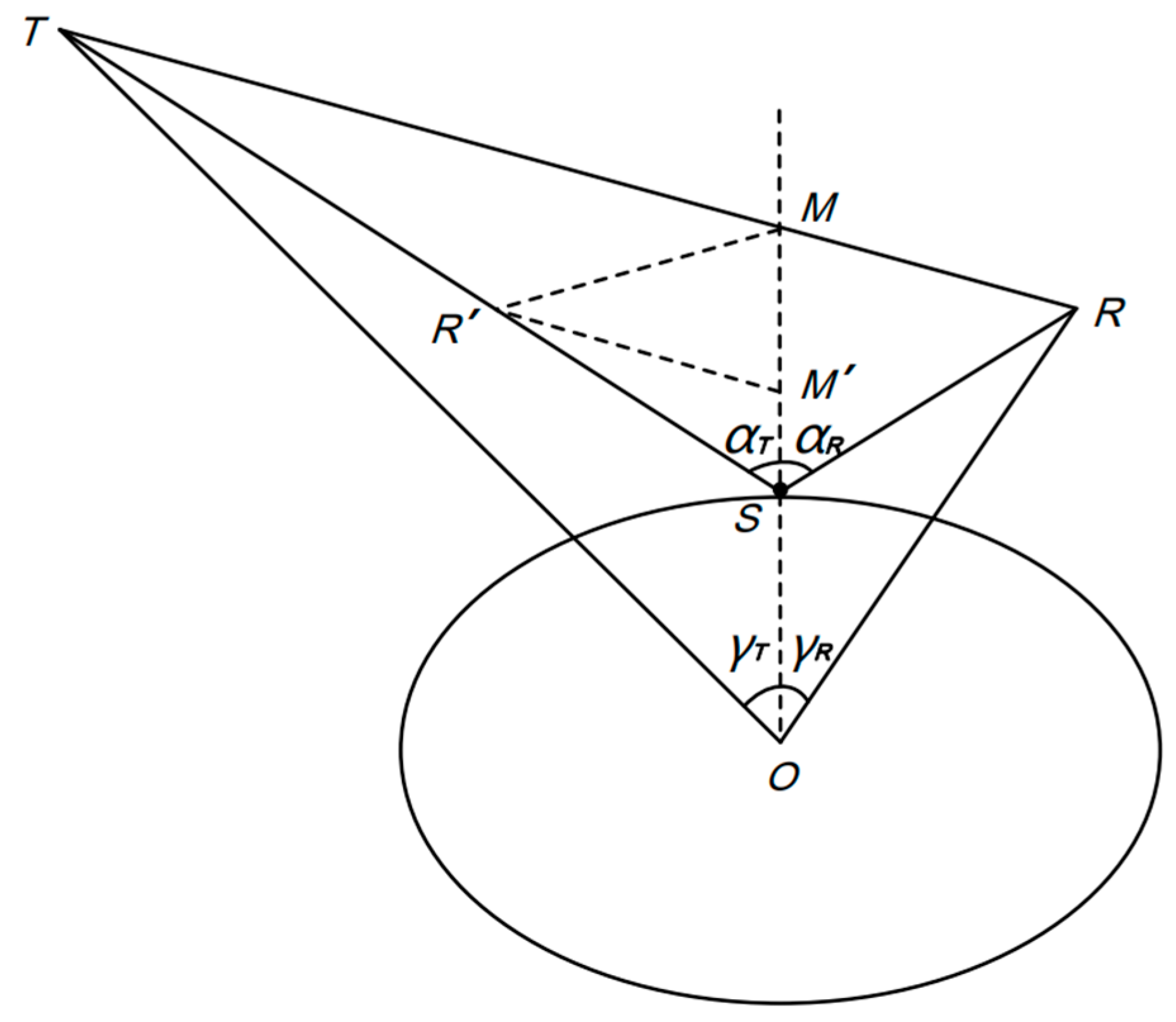
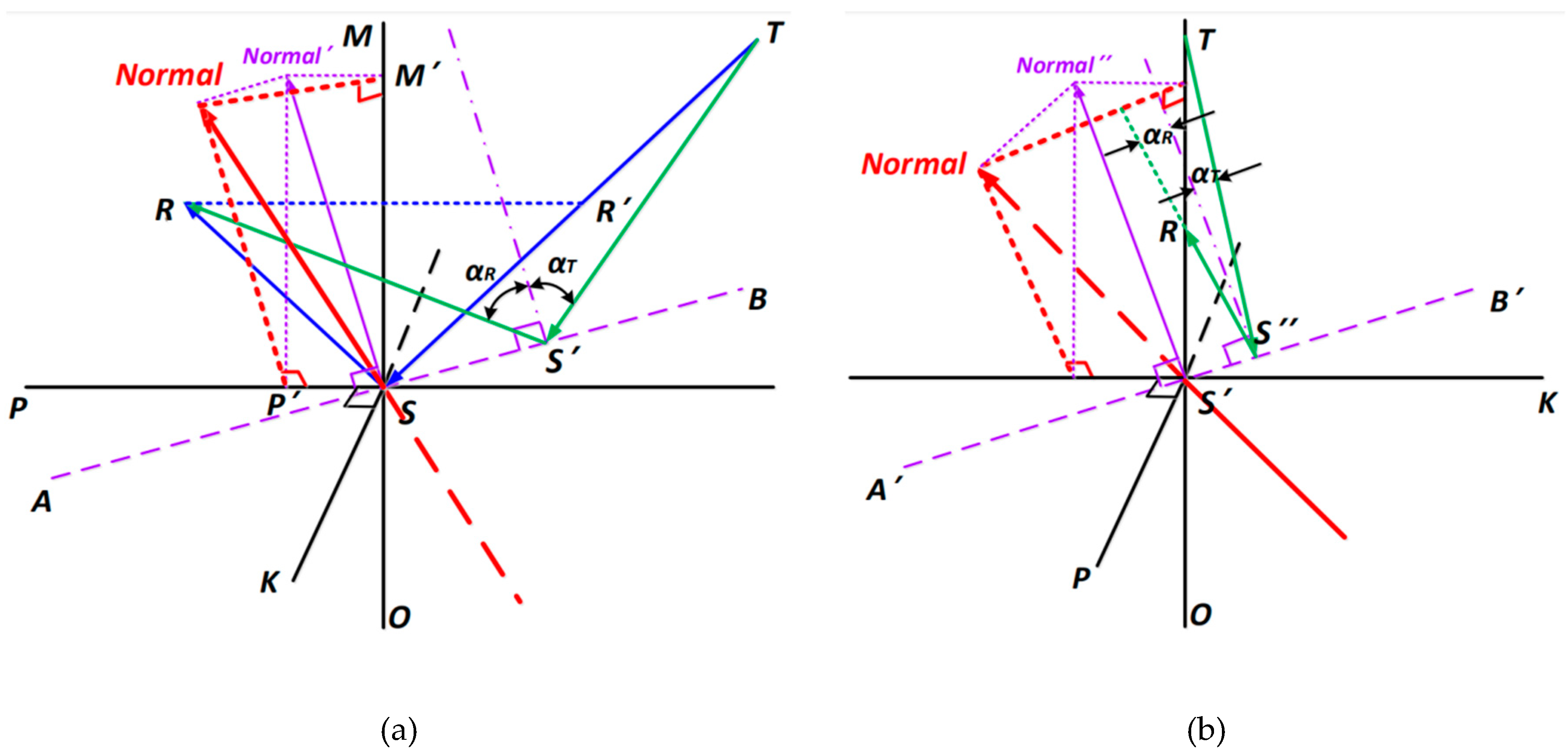
2.2.2. The Normal Projection Reflection Reference Surface Correction Method
3. Results
3.1. The Normal Projection Reflection Reference Surface Correction Method
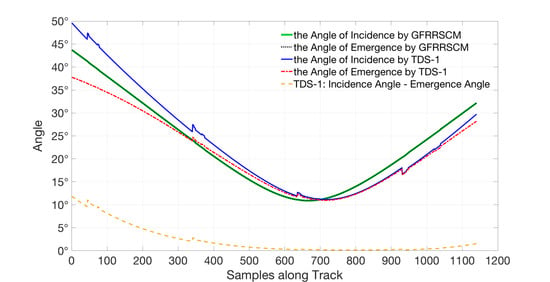
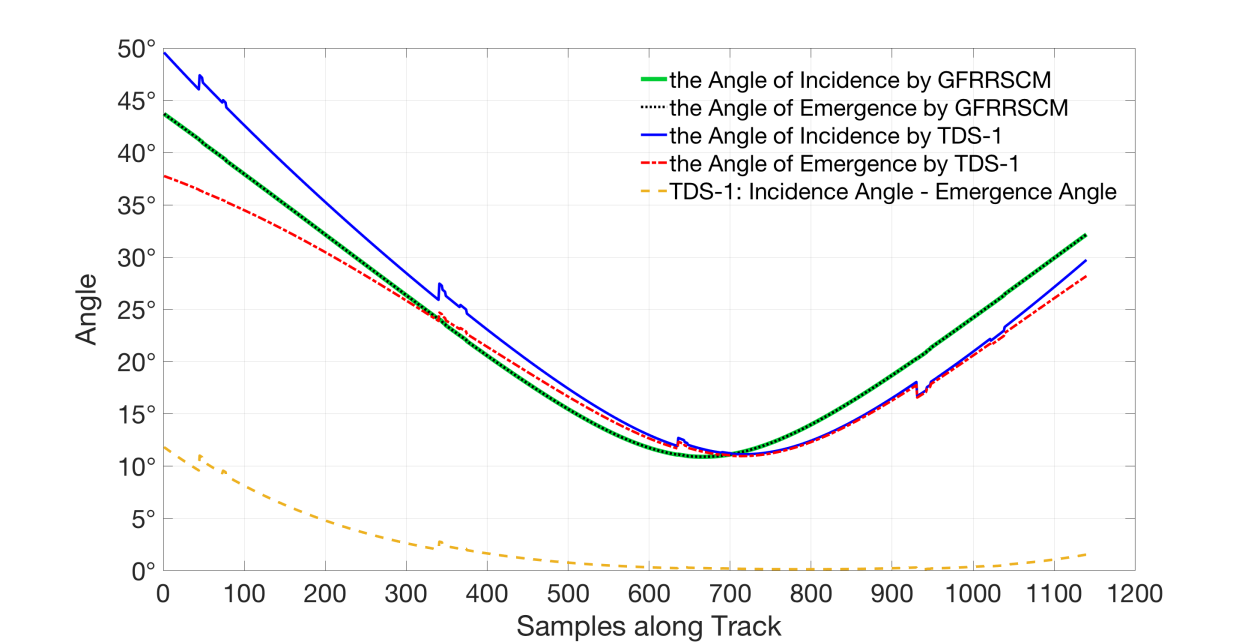
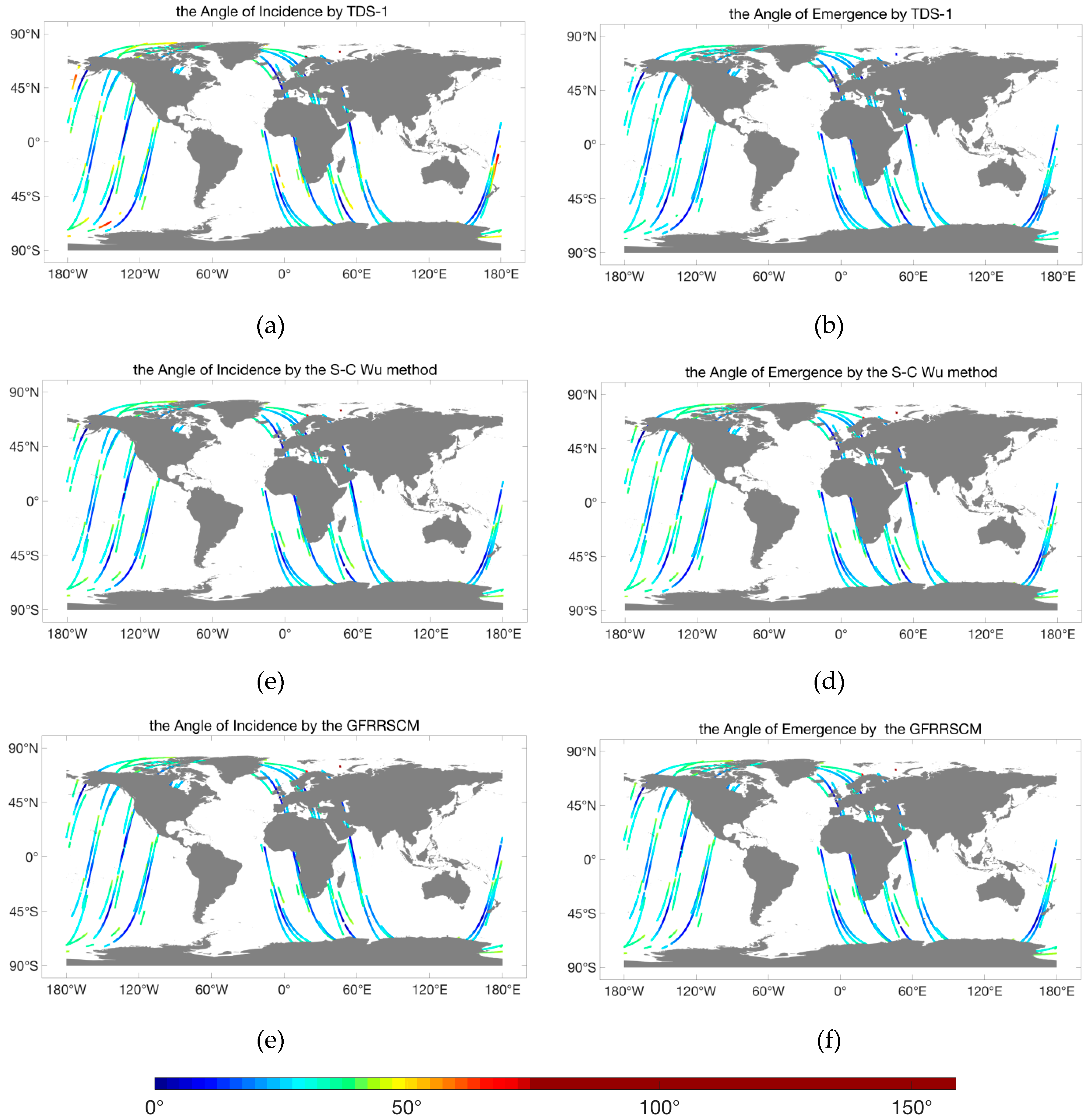
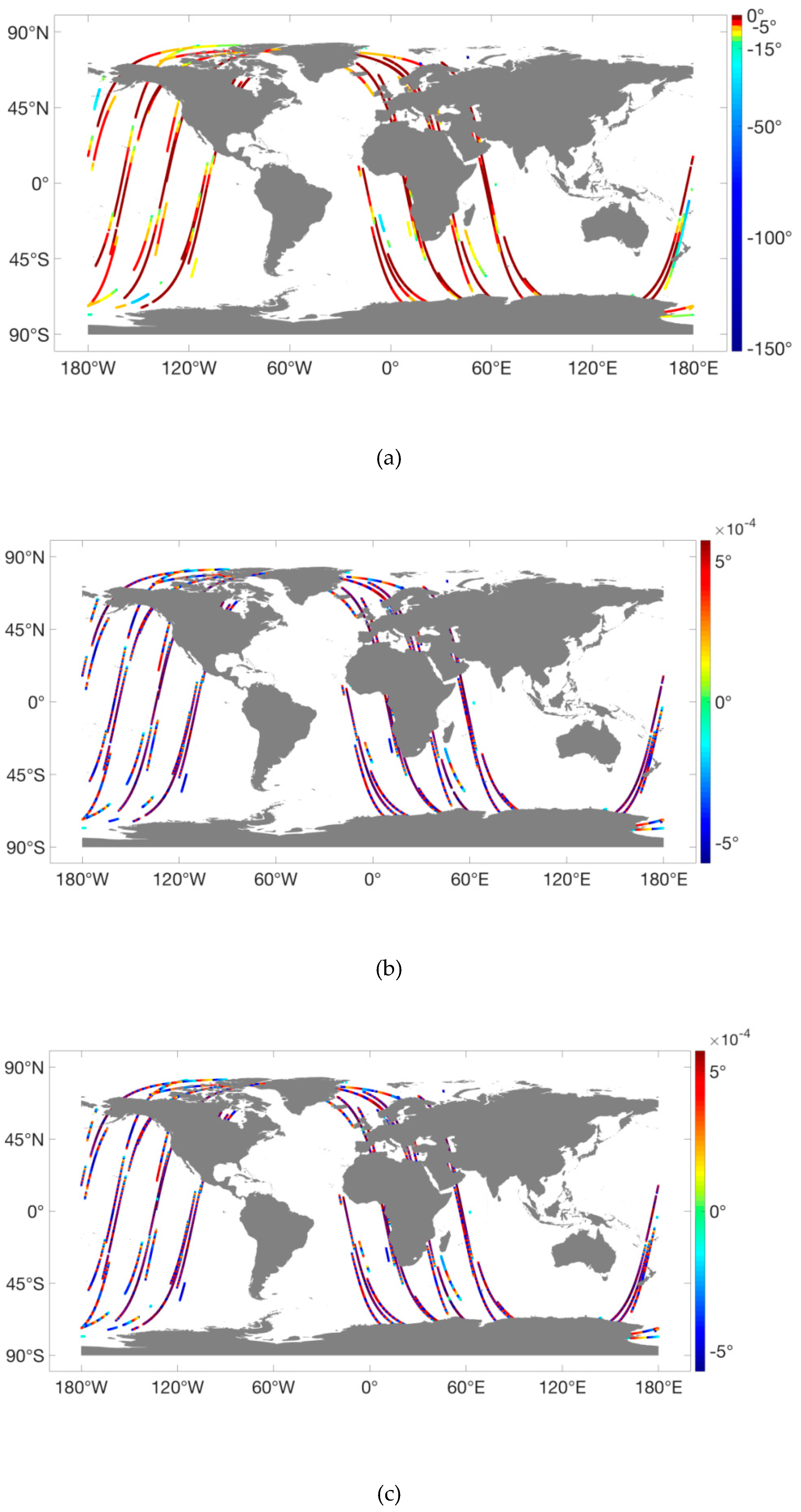
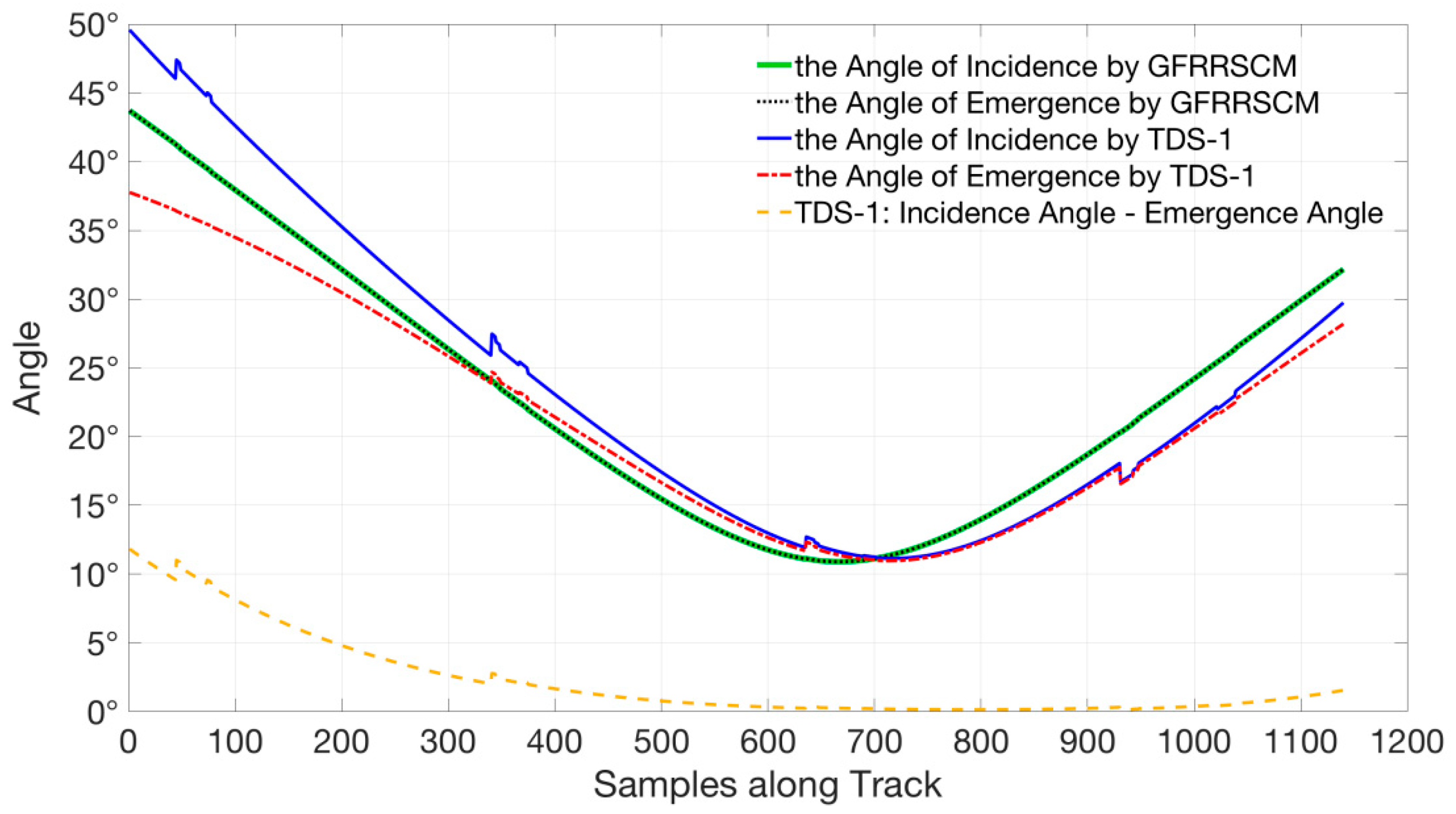
3.1.1. The Angle of Incidence and Emergence
3.1.2. The Specular Reflection Point Positioning Accuracy
3.2. The Normal Projection Reflection Reference Surface Correction Method
4. Discussion
5. Conclusions
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
References
- Yang, D.; Zhang, Q. GNSS Reflected Signal Processing: Fundamentals and Applications; Publishing House of Electronics Industry: Beijing, China, 2012. [Google Scholar]
- Martin-Neira, M. A Passive Reflectometry and Interferometry System (PARIS): Application to ocean altimetry. ESA J. 1993, 17, 331–355. [Google Scholar]
- Auber, J.C.; Bilbaut, A.; Rigal, J.M. Characterization of Multipath on Land and Sea at GPS Frequencies. In Proceedings of the 7th International Technical Meeting of the Satellite Division of the Institute of Navigation (ION GPS 1994), Salt Lake City, UT, USA, 20–23 September 1994; pp. 1155–1171. [Google Scholar]
- Katzberg, S.J.; Garrison, J.L. Utilizing GPS to Determine Ionospheric Delay over the Ocean; NASA Technical Memorandum; NASA Langley Technical Report Server: Hampton, VA, USA, 1996; p. 4750.
- Garrison, J.L.; Katzberg, S.J.; Hill, M.L. Effect of sea roughness on bistatically scattered range coded signal from the global positioning system. J. Geophys. Res. Lett. 1998, 25, 2257–2260. [Google Scholar] [CrossRef]
- Lowe, S.T.; Hajj, G.L. Detection of an ocean-Reflected GPS signal. In Proceedings of the GPS Surface Reflection Workshop at Goddard Space Flight Center, Pasadena, CA, USA, 20–21 July 1998. [Google Scholar]
- Zavorotny, V.U.; Voronovich, A.G. Scattering of GPS signals from the ocean with wind remote sensing application. J. IEEE Trans. Geosci. Remote Sens. 2000, 38, 951–964. [Google Scholar] [CrossRef]
- Martin-Neira, M.; Caparrini, M.; Font-Rossello, J.; Lannelongue, S.; Vallmitjana, C.S. The PARIS concept: An experimental demonstration of sea surface altimetry using GPS reflected signals. J. IEEE Trans. Geosci. Remote Sens. 2001, 39, 142–150. [Google Scholar] [CrossRef]
- Martin-Neria, M.; Colmenarejo, P.; Runi, G.; Serra, C. Ocean altimetry using the carrier phase of GNSS reflected signals. Cersat J. 2000, 11, 22. [Google Scholar]
- Rivas, M.; Martin-Neira, M. Coherent GPS Reflections from the Sea Surface. J. IEEE Geosci. Remote Sens. Lett. 2006, 3, 28–31. [Google Scholar]
- Lowe, S.T.; Zuffada, C.; Chao, Y.; Kroger, P.; Young, L.E.; LaBrecque, J.L. 5-cm precision aircraft ocean altimetry using GPS reflections. J. IEEE Geophys. Res. Lett. 2002, 29, 1375. [Google Scholar] [CrossRef]
- Ruffini, G.; Soulat, F.; Caparrini, M.; Germain, O.; Martín-Neira, M. The Eddy experiment: Accurate GNSS-R ocean altimetry from low altitude aircraft. J. Geophys. Res. Lett. 2004, 31. [Google Scholar] [CrossRef]
- Hajj, G.A.; Zuffada, C. Theoretical Description of a Bistatic System for Ocean Altimetry Using the GPS Signals. J. Ratio Sci. 2003, 38, 10. [Google Scholar] [CrossRef]
- Lowe, S.T.; LaBrecque, J.L.; Zuffada, C.; Romans, L.J.; Young, L.E.; Hajj, G.A. First spaceborne observation of an Earthreflected GPS signal. J. Radio Sci. 2002, 37, 1–28. [Google Scholar]
- Beyerle, G.; Hocke, K. Observation and Simulation of Direct and Reflected GPS Signals in Radio Occultation Experiment. J. Geophys. Res. Lett. 2001, 28, 1895–1898. [Google Scholar] [CrossRef]
- Beyerle, G.; Hocke, K.; Wickert, J.; Schmidt, T.; Marquardt, C.; Reigber, C. GPS Radio Occultations with CHAMP: A Radio Holographic Analysis of GPS Signal Propagation in the Troposphere and Surface Reflections. J. Geophys. Res. 2002, 107, 27. [Google Scholar] [CrossRef]
- Gleason, S.; Hodgart, S.; Sun, Y.; Gommenginger, C.; Mackin, S.; Adjrad, M.; Unwin, M. Detection and processing of bistatically reflected GPS signals from low Earth orbit for the purpose of ocean remote sensing. J. IEEE Trans. Geosci. Remote Sens. 2005, 43, 1229–1241. [Google Scholar] [CrossRef]
- Foti, G.; Gommenginger, C.; Jales, P.; Unwin, M.; Shaw, A.; Robertson, C.; Rosello, J. Spaceborne GNSS reflectometry for ocean winds: First results from the UK TechDemoSat-1 mission. J. Geophys. Res. Lett. 2015, 42, 5435–5441. [Google Scholar] [CrossRef] [Green Version]
- Clarizia, M.P.; Ruf, C.; Cipollini, P.; Zuffada, C. First spaceborne observation of sea surface height using GPS–Reflectometry. J. Geophys. Res. Lett. 2016, 43, 767–774. [Google Scholar] [CrossRef]
- Ruf, C.; Gleason, S.; Jelenak, Z.; Katzberg, S.; Ridley, A.; Rose, R.; Scherrer, J.; Zavorotny, V. The NASA EV-2 cyclone global navigation satellite system (CYGNSS) mission. In Proceedings of the IEEE Aerospace Conference, Big Sky, MT, USA, 2–9 March 2013; pp. 1–7. [Google Scholar]
- Ruf, C.; Lyons, A.; Unwin, M.; Dickinson, J.; Rose, R.; Rose, D.; Vincent, M. CYGNSS: Enabling the future of hurricane prediction [remote sensing satellites]. J. IEEE Geosci. Remote Sens. Mag. 2013, 1, 52–67. [Google Scholar] [CrossRef]
- Yan, L.; Cui, C.; Wu, H. A gravity matching algorithm based on TERCOM. J. Geomat. Inf. Sci. Wuhan Univ. 2009, 34, 261–264. [Google Scholar]
- Tong, Y.; Bian, S.; Jiang, D. A new intergrated gravity matching algorithm based on approximated local gravity map. J. Geophys. 2012, 55, 2917–2925. [Google Scholar]
- Dixon, T.; Rodriguez, E.; Martin, J.; Tralli, D. Section 2.1: High Resolution Continental Topographic Data: Scientific Applications and a Possible Approach. In Proceedings of the Consultative Meeting on Imaging Altimeter Requirements and Techniques, Mullard Space Science Lab, Dorking, UK, 30 May–1 June 1990. [Google Scholar]
- Alenia. Final Report for the Constellation of Pulse Limited Nadir Looking Radar Altimeters; IAB/FR/ALS/001, ESTEC Contract 9370/91; ESTEC: Noordwijk, The Netherlands, 1992. [Google Scholar]
- Zheng, W.; Xu, H.; Zhong, M.; Yuan, M.; Zhou, X.; Peng, B. Efficient and rapid estimation of the accuracy of future GRACE Follow-On Earth’s gravitational field using the analytic method. J. Geophys. 2010, 53, 796–806. [Google Scholar] [CrossRef]
- Helm, A. Ground-Based GPS Altimetry with the L1 OpenGPS Receiver Using Carrier Phase-Delay Observations of Reflected GPS Signals. Ph.D. Thesis, Postdam Deutsches GFZ, Potsdam, Germany, 2008. [Google Scholar]
- Wu, S.-C.; Meechan, T.; Young, L. The potential Use of GPS Signals as Ocean Altimetry Observation. In Proceedings of the National Technical Meeting, Santa Monica, CA, USA, 14–16 January 1997. [Google Scholar]
- Kostelecky, J.; Klokocnik, J.; Wagner, C.A. Geometry and acuracy of reflecting points in bistatic satelite altimetry. J. Geod. 2005, 79, 421–430. [Google Scholar] [CrossRef]
- Rius, A.; Cardellach, E.; Martin-Neira, M. Altimetric Analysis of the Sea-Surface GPS-Reflected Signals. IEEE Trans. Geosci. Remote Sens. 2010, 48, 2119–2127. [Google Scholar] [CrossRef]
- Skolnik, M. Radar Handbook; McGraw-Hill, Inc.: New York, NY, USA, 1990. [Google Scholar]
- Gao, F.; Xu, T.; Wang, N.; Jiang, C.; Du, Y.; Nie, W.; Xu, G. Spatiotemporal Evaluation of GNSS-R Based on Future Fully Operational Global Multi-GNSS and Eight-LEO Constellations. Remote Sens. 2018, 10, 67. [Google Scholar] [CrossRef]
- Zhang, B.; Wang, F.; Yang, D. The algorithm for the determination of the GNSS-R specular point based on the dichotomy of the line segment. J. GNSS World China 2013, 38, 11–16. [Google Scholar]
- Wagner, C.; Klokocnok, J. The value of ocean reflections of GPS signals to enhance satelite altimetry: Data distribution and error analysis. J. Geod. 2003, 77, 128–138. [Google Scholar] [CrossRef]
- Gleason, S.; Gebre-Egziabher, D. GNSS Applications and Methods; Artech House: Norwood, MA, USA, 2009; pp. 53–71. [Google Scholar]
- Jales, P.; Unwin, M. MERRByS Product Manual—GNSS Reflectometry on TDS-1 with the SGR-ReSI; Surrey Satellite Technology LTD: Guildford, UK, 2017. [Google Scholar]
- Pavlis, N.K.; Saleh, J. Error propagation with geographic specificity for very high degree geopotential models. In Gravity, Geoid and Space Missions; Jekeli, C., Bastos, L., Fernandes, J., Eds.; Springer: Berlin, Germany, 2005; Volume 129. [Google Scholar]
- Pavlis, N.K.; Holmes, S.A.; Kenyon, S.C.; Factor, J.K. The development and evaluation of the Earth Gravitational Model 2008 (EGM2008). J. Geophys. Res. Solid Earth 2012, 117. [Google Scholar] [CrossRef] [Green Version]







{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| TDS-1 | S-C Wu Method | GFRRSCM | |||||||
|---|---|---|---|---|---|---|---|---|---|
| Angle | incidence | emergence | difference | incidence | emergence | difference | incidence | emergence | difference |
| Mean (°) | 2.822 × 101 | 2.469 × 101 | −3.515 × 100 | 2.653 × 101 | 2.653 × 101 | −5.932 × 10-7 | 2.653 × 101 | 2.653 × 101 | −5.932 × 10-7 |
| Standard Deviation (°) | 5.618 × 100 | 4.005 × 100 | 1.834 × 100 | 4.781557 × 100 | 4.781573 × 100 | 3.978 × 10-4 | 4.781557 × 100 | 4.781573 × 100 | 3.978 × 10-4 |
| Spatial Distance (m) | X (m) | Y (m) | Z (m) | B (°) | L (°) | ||
|---|---|---|---|---|---|---|---|
| the S-C Wu method vs TDS-1 | mean | 4.147 × 104 | 1.761 × 104 | 1.736 × 104 | 2.764 × 104 | 3.488 × 10-1 | 4.839 × 10-1 |
| Standard deviation | 2.027 × 104 | 9.304 × 103 | 9.388 × 103 | 1.372 × 104 | 1.745 × 10-1 | 1.635 × 100 | |
| the GFRRSCMvs the S-CWu method | mean | 2.515 × 101 | 1.085 × 101 | 1.170 × 101 | 1.459 × 101 | 2.817 × 10-4 | 1.733 × 10-4 |
| Standard deviation | 7.821 × 100 | 4.352 × 100 | 4.695 × 100 | 6.267 × 100 | 2.078 × 10-3 | 7.448 × 10-4 |
| Spatial Distance (m) | X (m) | Y (m) | Z (m) | |||||||||
|---|---|---|---|---|---|---|---|---|---|---|---|---|
| Min | Max | Mean | Min | Max | Mean | Min | Max | Mean | Min | Max | Mean | |
| the NPRRSCMto the GFRRSCM | 5.173 × 10-5 | 5.610 × 101 | 1.305 × 101 | 7.291 × 10-6 | 4.344 × 101 | 6.843 × 100 | 1.506 × 10-5 | 4.802 × 101 | 6.794 × 100 | 3.133 × 10-5 | 4.035 × 101 | 5.832 × 100 |
| the GF-NPRRSCCM to the S-C Wu | 3.958 × 10-2 | 1.045 × 102 | 2.866 × 101 | 3.051 × 10-5 | 8.175 × 101 | 1.373 × 101 | 2.884 × 10-6 | 7.657 × 101 | 1.322 × 101 | 3.583 × 10-5 | 8.452 × 101 | 1.608 × 101 |
© 2018 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Wu, F.; Zheng, W.; Li, Z.; Liu, Z. Improving the GNSS-R Specular Reflection Point Positioning Accuracy Using the Gravity Field Normal Projection Reflection Reference Surface Combination Correction Method. Remote Sens. 2019, 11, 33. https://doi.org/10.3390/rs11010033
Wu F, Zheng W, Li Z, Liu Z. Improving the GNSS-R Specular Reflection Point Positioning Accuracy Using the Gravity Field Normal Projection Reflection Reference Surface Combination Correction Method. Remote Sensing. 2019; 11(1):33. https://doi.org/10.3390/rs11010033
Chicago/Turabian StyleWu, Fan, Wei Zheng, Zhaowei Li, and Zongqiang Liu. 2019. "Improving the GNSS-R Specular Reflection Point Positioning Accuracy Using the Gravity Field Normal Projection Reflection Reference Surface Combination Correction Method" Remote Sensing 11, no. 1: 33. https://doi.org/10.3390/rs11010033