A New Algorithm for MLS-Based DBH Mensuration and Its Preliminary Validation in an Urban Boreal Forest: Aiming at One Cornerstone of Allometry-Based Forest Biometrics


Abstract
:
1. Introduction
2. Materials and Methods
2.1. Study Area
2.2. Data Preparation
2.2.1. Data Collection
2.2.2. Data Processing
2.3. Methods
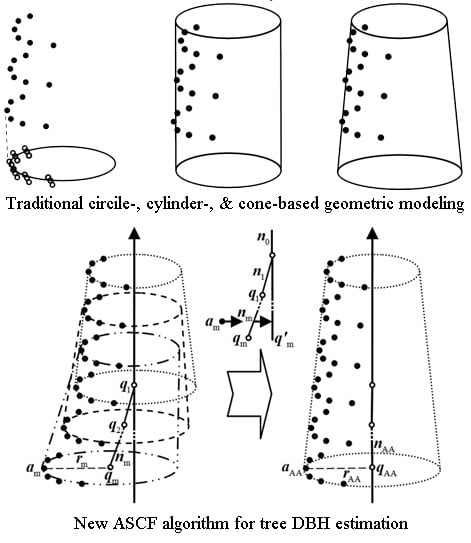
2.3.1. Theoretical Analysis of Traditional Algorithms
2.3.2. Analysis of MLS Sampling Characteristics
2.3.3. Algorithm Development
2.4. Performance Assessment
3. Results
3.1. Circle-Based DBH Estimation
3.2. Cylinder-Based DBH Estimation
3.3. Cone-Based DBH Estimation
3.4. ASCF-Based DBH Estimation
4. Discussion
4.1. Performance Analysis
4.2. Potential Improvements
4.3. Practical Implications
5. Conclusions
Author Contributions
Acknowledgments
Conflicts of Interest
References
- Prodan, M. Forest Biometrics; Pergamon Press: Oxford, UK, 1968; p. 447. [Google Scholar]
- Temesgen, H.; Goerndt, M.E.; Johnson, G.P.; Adams, D.M.; Monserud, R.A. Forest measurement and biometrics in forest management: Status and future needs of the Pacific Northwest USA. J. For. 2007, 105, 233–238. [Google Scholar]
- Avery, T.E.; Burkhart, H.E. Forest Measurements, 5th ed.; Waveland Press: Long Grove, IL, USA, 2015; p. 456. [Google Scholar]
- Tobin, B.; Black, K.; Osborne, B.; Reidy, B.; Bolger, T.; Nieuwenhuis, M. Assessment of allometric algorithms for estimating leaf biomass, leaf area index and litter fall in different-aged Sitka spruce forests. Forestry 2006, 76, 453–465. [Google Scholar] [CrossRef]
- Kukrety, S.; Wilson, D.C.; D’Amato, A.W.; Becker, D.R. Assessing sustainable forest biomass potential and bioenergy implications for the northern Lake States region, USA. Biomass Bioenergy 2015, 81, 167–176. [Google Scholar] [CrossRef]
- Houghton, R.A.; Hall, F.; Goetz, S.J. Importance of biomass in the global carbon cycle. J. Geophys. Res. 2009, 114, G00E03. [Google Scholar] [CrossRef]
- Jain, A.K.; Tao, Z.; Yang, X.; Gillespie, C. Estimation of global biomass burning emissions for reactive greenhouse gases (CO, NMHCs, and NOx) and CO2. J. Geophys. Res. 2006, 111, D06304. [Google Scholar] [CrossRef]
- Picard, N.; Saint-André, L.; Henry, M. Manual for Building Tree Volume and Biomass Allometric Equations: From Field Measurement to Prediction; Food and Agricultural Organization of the United Nations, Rome, and Centre de Coopération Internationale en Recherche Agronomique pour le Développement: Montpellier, France, 2012; p. 215. [Google Scholar]
- Basuki, T.; van Laake, P.; Skidmore, A.; Hussion, Y. Allometric equations for estimating the above-ground biomass in tropical lowland Dipterocarp forests. For. Ecol. Manag. 2009, 257, 1684–1694. [Google Scholar] [CrossRef]
- Kumagai, T.; Nagasawa, H.; Mabuchi, T.; Ohsaki, S.; Kybota, K.; Kogi, K.; Utsumi, Y.; Koga, S.; Otsuki, K. Sources of error in estimating stand transpiration using allometric relationships between stem diameter and sapwood area for Cryptomeria japonica and Chamaecypairs obtusa. For. Ecol. Manag. 2005, 206, 191–195. [Google Scholar] [CrossRef]
- Ter-Mikaelian, M.T.; Korzukhin, M.D. Biomass equations for sixty-five North American tree species. For. Ecol. Manag. 1997, 97, 1–24. [Google Scholar] [CrossRef]
- Arias, D.; Calvo-Alvarado, J.; Richter, D.D.B.; Dohrenbusch, A. Productivity, aboveground biomass, nutrient uptake and carbon content in fast-growing tree plantations of native and introduced species in the Southern Region of Costa Rica. Biomass Bioenergy 2011, 35, 1779–1788. [Google Scholar] [CrossRef]
- Borah, M.; Das, D.; Kalita, J.; Boruah, H.P.D.; Phukan, B.; Neog, B. Tree species composition, biomass and carbon stocks in two tropical forest of Assam. Biomass Bioenergy 2015, 78, 25–35. [Google Scholar] [CrossRef]
- Beets, P.; Kimberley, M.; Oliver, G.; Pearce, S.; Graham, D.; Brandon, A. Allometric equations for estimating carbon stocks in natural forest in New Zealand. Forests 2012, 3, 818–839. [Google Scholar] [CrossRef]
- Bouchard, S.; Landry, M.; Gagnon, Y. Methodology for the large scale assessment of the technical power potential of forest biomass: Application to the province of New Brunswick, Canada. Biomass Bioenergy 2013, 54, 1–17. [Google Scholar] [CrossRef]
- Cai, S.; Kang, X.; Zhang, L. Nondestructive estimates of above-ground biomass using terrestrial laser scanning. Ann. For. Res. 2013, 56, 105–122. [Google Scholar]
- Kuyah, S.; Sileshi, G.W.; Njoloma, J.; Mng’omba, S.; Neufeldt, H. Estimating aboveground tree biomass in three different miombo woodlands and associated land use systems in Malawi. Biomass Bioenergy 2014, 66, 214–222. [Google Scholar] [CrossRef]
- Lefsky, M.A.; Harding, D.; Cohen, W.; Parker, G.; Shugart, H. Surface Lidar remote sensing of basal area and biomass in deciduous forests of Eastern Maryland, USA. Remote Sens. Environ. 1999, 67, 83–98. [Google Scholar] [CrossRef]
- De Jong, S.M.; Pebesma, E.J.; Lacaze, B. Above-ground biomass assessment of Mediterranean forests using airborne imaging spectrometry: The DAIS Peyne experiment. Int. J. Remote Sens. 2003, 24, 1505–1520. [Google Scholar] [CrossRef]
- Asner, G.; Palace, M.; Keller, M.; Pereira, R.; Silva, J.; Zweede, J. Estimating canopy structure in an Amazon forest from laser range finder and IKONOS satellite observations. Biotropica 2002, 34, 483–492. [Google Scholar] [CrossRef]
- Moran, L.A.; Williams, R.A. Comparison of three dendrometers in measuring diameter at breast height. North. J. Appl. For. 2002, 19, 28–33. [Google Scholar]
- Chisholm, R.A.; Cui, J.; Lum, S.K.Y.; Chen, B.M. UAV LiDAR for below-canopy forest surveys. J. Unmanned Veh. Syst. 2013, 1, 61–68. [Google Scholar] [CrossRef]
- Liang, X.; Jaakkola, A.; Wang, Y.; Hyyppä, J.; Honkavaara, E.; Liu, J.; Kaartinen, H. The use of a hand-held camera for individual tree 3D mapping in forest sample plots. Remote Sens. 2014, 6, 6587–6603. [Google Scholar] [CrossRef]
- Maas, H.G.; Bienert, A.; Scheller, S.; Keane, E. Automatic forest inventory parameter determination from terrestrial laser scanner data. Int. J. Remote Sens. 2008, 29, 1579–1593. [Google Scholar] [CrossRef]
- Brolly, G.; Kiraly, G. Algorithms for stem mapping by means of terrestrial laser scanning. Acta Silv. Lign. Hung. 2009, 5, 119–130. [Google Scholar]
- Tansey, K.; Selmes, N.; Anstee, A.; Tate, N.J.; Denniss, A. Estimating tree and stand variables in a Corsican pine woodland from terrestrial laser scanner data. Int. J. Remote Sens. 2009, 30, 5195–5209. [Google Scholar] [CrossRef]
- Antonarakis, A.S. Evaluating forest biometrics obtained from ground lidar in complex riparian forests. Remote Sens. Lett. 2011, 2, 61–70. [Google Scholar] [CrossRef]
- Huang, H.; Li, Z.; Gong, P.; Cheng, X.; Clinton, N.; Cao, C. Automated methods for measuring dbh and tree heights with a commercial scanning Lidar. Photogramm. Eng. Remote Sens. 2011, 77, 219–227. [Google Scholar] [CrossRef]
- Moskal, M.; Zheng, G. Retrieving forest inventory variables with terrestrial laser scanning (TLS) in urban heterogeneous forest. Remote Sens. 2012, 4, 1–20. [Google Scholar] [CrossRef]
- Liang, X.; Kankare, V.; Yu, X.; Hyyppä, J.; Holopainen, M. Automatic stem curve measurement using terrestrial laser scanning. IEEE Trans. Geosci. Remote Sens. 2014, 52, 1739–1748. [Google Scholar] [CrossRef]
- Kankare, V.; Holopainen, M.; Vastaranta, M.; Puttonen, E.; Yu, X.; Hyyppä, J.; Vaaja, M.; Hyyppä, H.; Alho, P. Individual tree biomass estimation using terrestrial laser scanning. ISPRS J. Photogramm. Remote Sens. 2013, 75, 64–75. [Google Scholar] [CrossRef]
- Calders, K.; Newnham, G.; Burt, A.; Murphy, S.; Raumonen, P.; Herold, M.; Culvenor, D.; Avitabile, A.; Disney, M.; Armston, J.; et al. Nondestructive estimates of above-ground biomass using terrestrial laser scanning. Methods Ecol. Evol. 2014, 6, 198–208. [Google Scholar] [CrossRef]
- Maan, G.S.; Singh, C.K.; Singh, M.K.; Nagarajan, B. Tree species biomass and carbon stock measurement using ground based-LiDAR. Geocarto Int. 2015, 30, 293–310. [Google Scholar] [CrossRef]
- Hackenberg, J.; Wassenberg, M.; Spiecker, H.; Sun, D. Non destructive method for biomass prediction combining TLS derived tree volume and wood density. Forests 2015, 6, 1274–1300. [Google Scholar] [CrossRef]
- Hauglin, M.; Gobakken, T.; Astrup, R.; Ene, L.; Nesset, E. Estimating single-tree crown biomass of Norway spruce by airborne laser scanning: A comparison of methods with and without the use of terrestrial laser scanning to obtain the ground reference data. Forests 2014, 5, 384–403. [Google Scholar] [CrossRef]
- Strahler, A.H.; Jupp, D.L.B.; Woodcock, C.E.; Schaaf, C.B.; Yao, T.; Zhao, F.; Yang, X.; Lovell, J.; Culvenor, D.; Newnham, G.; et al. Retrieval of forest structural parameters using a ground-based lidar instrument (echidna). Can. J. Remote Sens. 2008, 34, 426–440. [Google Scholar] [CrossRef]
- Lin, Y.; Jaakkola, A.; Hyyppä, J.; Kaartinen, H. From TLS to VLS: Biomass estimation at individual tree level. Remote Sens. 2010, 2, 1864–1879. [Google Scholar] [CrossRef]
- Rutzinger, M.; Pratihast, A.K.; Elberink, S.O.; Vosselman, G. Detection and modeling of 3D trees from mobile laser scanning data. Int. Arch. Photogramm. Remote Sens. Spat. Inf. Sci. 2010, 38, 520–525. [Google Scholar]
- Kukko, A.; Kartinen, H.; Hyyppä, J.; Chen, Y. Multiplatform mobile laser scanning: Usability and performance. Sensors 2012, 12, 11712–11733. [Google Scholar] [CrossRef]
- Kaasalainen, S.; Kaartinen, H.; Kukko, A.; Anttila, K.; Krooks, A. Brief communication: Application of mobile laser scanning in snow cover profiling. Cryosphere Discuss. 2010, 5, 135–138. [Google Scholar] [CrossRef] [Green Version]
- Liang, X.; Hyyppä, J.; Kukko, A.; Kaartinen, H.; Jaakkola, A.; Yu, X. The use of a mobile laser scanning system for mapping large forest plots. IEEE Geosci. Remote Sens. Lett. 2014, 11, 1504–1508. [Google Scholar] [CrossRef]
- Lin, Y.; Hyyppä, J.; Kukko, A.; Jaakkola, A.; Kaartinen, H. Tree height growth measurement with single-scan airborne, static terrestrial and mobile laser scanning. Sensors 2012, 12, 12798–12813. [Google Scholar] [CrossRef] [PubMed]
- Holopainen, M.; Kankare, V.; Vastaranta, M.; Liang, X.; Lin, Y.; Vaaja, M.; Yu, X.; Hyyppä, J.; Hyyppä, H.; Kaartinen, H.; et al. Tree mapping using airborne, terrestrial and mobile laser scanning—A case study in a heterogeneous urban forest. Urban For. Urban Green. 2013, 12, 546–553. [Google Scholar] [CrossRef]
- Heinrichs, D.K.; Tardif, J.C.; Bergeron, Y. Xylem production in six tree species growing on an island in the boreal forest region of western Quebec, Canada. Can. J. Bot. 2007, 85, 518–525. [Google Scholar] [CrossRef]
- Lin, Y.; Hyyppä, J.; Jaakkola, A.; Yu, X. Three-level frame and RD-schematic algorithm for automatic recognition of individual trees from MLS point clouds. Int. J. Remote Sens. 2012, 33, 1701–1716. [Google Scholar] [CrossRef]
- Gander, W.; Golub, G.H.; Strebel, R. Least squares fitting of circles and ellipses. Bull. Belg. Math. Soc. 1996, 3, 63–84. [Google Scholar] [CrossRef]
- Lehtomäki, M.; Jaakkola, A.; Hyyppä, J.; Kukko, A.; Kaartinen, H. Detection of vertical pole-like objects in a road environment using vehicle-based laser scanning data. Remote Sens. 2010, 2, 641–664. [Google Scholar] [CrossRef]
- Condés, S.; Sterba, H. Derivation of compatible crown width equations for some important tree species of Spain. For. Ecol. Manag. 2005, 217, 203–218. [Google Scholar] [CrossRef]
- Lin, Y.; Hyyppä, J.; Kukko, A. Stop-and-go mode: Sensor manipulation as essential as sensor development in terrestrial laser scanning. Sensors 2013, 13, 8140–8154. [Google Scholar] [CrossRef] [PubMed]
- Lin, Y.; Herold, M. Tree species classification based on explicit tree structure feature parameters derived from mobile terrestrial laser scanning data. Agric. For. Meteorol. 2016, 216, 105–114. [Google Scholar] [CrossRef]
- Sabatia, C.; Burkhart, H. Predicting site index of plantation loblolly pine from biophysical variables. For. Ecol. Manag. 2014, 326, 142–156. [Google Scholar] [CrossRef]
- Thomas, S. Photosynthetic capacity peaks at intermediate size in temperate deciduous trees. Tree Physiol. 2010, 30, 555–573. [Google Scholar] [CrossRef] [PubMed]
- Meinzer, F.; Goldstein, G.; Andrade, J. Regulation of water flux through tropical forest canopy trees: Do universal rules apply? Tree Physiol. 2001, 21, 19–26. [Google Scholar] [CrossRef] [PubMed]
- Peltoniemi, M.; Mäkipää, R. Quantifying distance-independent tree competition for predicting Norway spruce mortality in unmanaged forests. For. Ecol. Manag. 2011, 261, 30–42. [Google Scholar] [CrossRef]
- Rheinhardt, R.; Brinson, M.; Meyer, G.; Miller, K. Integrating forest biomass and distance from channel to develop an indicator of riparian condition. Ecol. Indic. 2012, 23, 46–55. [Google Scholar] [CrossRef]
- Dondina, O.; Orioli, V.; Massimino, D.; Pinoli, G.; Bani, L. A method to evaluate the combined effect of tree species composition and woodland structure on indicator birds. Ecol. Indic. 2015, 55, 44–51. [Google Scholar] [CrossRef]










{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Reference DBH (mm) | PDV (Points/m) | ||
|---|---|---|---|
| MO | min | 109.00 | 111.34 |
| max | 630.00 | 7212.40 | |
| mean | 370.51 | 793.04 | |
| MT-1 | min | 198.00 | 174.89 |
| max | 446.00 | 1188.10 | |
| mean | 333.83 | 520.78 | |
| MT-2 | min | 198.00 | 92.35 |
| max | 446.00 | 1526.20 | |
| mean | 333.83 | 543.13 |
| Geometric Primitive | Estimation Error (mm) | Researcher(s) and Reference |
|---|---|---|
| circle | 14.8–47.0 | Maas et al. [24] |
| circle and cylinder | 34.0–42.0 and 70.0 | Brolly and Kiraly [25] |
| circle and cylinder | 19.0 and 37.0 | Tansey et al. [26] |
| circle | 34.0–37.4 | Huang et al. [28] |
| cylinder | 3.0–4.0 | Antonarakis [27] |
| cylinder | 91.7 | Moskal and Zheng [29] |
| cylinder | 7.60–8.70 | Liang et al. [30] |
© 2018 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Lin, Y.; Jiang, M. A New Algorithm for MLS-Based DBH Mensuration and Its Preliminary Validation in an Urban Boreal Forest: Aiming at One Cornerstone of Allometry-Based Forest Biometrics. Remote Sens. 2018, 10, 749. https://doi.org/10.3390/rs10050749
Lin Y, Jiang M. A New Algorithm for MLS-Based DBH Mensuration and Its Preliminary Validation in an Urban Boreal Forest: Aiming at One Cornerstone of Allometry-Based Forest Biometrics. Remote Sensing. 2018; 10(5):749. https://doi.org/10.3390/rs10050749
Chicago/Turabian StyleLin, Yi, and Miao Jiang. 2018. "A New Algorithm for MLS-Based DBH Mensuration and Its Preliminary Validation in an Urban Boreal Forest: Aiming at One Cornerstone of Allometry-Based Forest Biometrics" Remote Sensing 10, no. 5: 749. https://doi.org/10.3390/rs10050749