2.2. CS Algorithm Using Random Fourier Series
Since the received signal
is confined to the interval
, we can extend
in a Fourier series as:
where:
Substituting Equation (
1) into Equation (
3), we get:
where
denotes the continuous time Fourier transformation of
.
For a set
of
K indices for which
, such an integer subset exists for a UWB (ultra-wideband) radar transmitted pulse due to its very large relative bandwidth. Equation (
4) can be rewritten as:
denotes the
Vandermonde matrix given by
, where
is the vector of the unknown time delays. In addition, let
and
. The formulation of the relationship between the signal’s Fourier series coefficients (
y) and its unknown parameters (amplitudes and time delays) is obtained [
24] as follows:
Given vector
y, the total-variation (TV) norm is the continuous Fourier series version that is used to estimate the amplitudes and time delays [
19,
26], which can be interpreted as finding the shortest linear combination of elements taken from a continuous and infinite dictionary. The TV norm minimization problem in Equation (
6) is expressed as:
where
is the noise level, and
can be recovered with a precision inversely proportional to
[
26].
This is a convex optimization problem that can be solved efficiently by many different algorithms. In this paper, in order to make the selected
widely adaptable, we fixed it with the data noise level by the following formula:
where
is the length of vector
y.
To acquire the Fourier series coefficients, we employed the Xampling scheme (described in the papers [
19,
25,
27]), which enables the extraction of the necessary samples of Fourier series coefficients at a sub-Nyquist rate. Consecutive Fourier series coefficients can be easily obtained but, here, we used a nonconsecutive set of Fourier series coefficients that we randomly selected in a distributed manner from wide frequency aperture, which greatly increases the resolution of the underlying signal [
28]. In other words, any Fourier series is important, or any Fourier series is not important. Tang et al. [
28] proposed an atomic norm minimization approach, similar to the total-variation (TV) norm minimization, to recover the missing Fourier series coefficients. Assume that a subset of entries
are selected at random and form the set
of consecutive Fourier coefficients, as prescribed in the paper [
28]; then, a natural algorithm for estimating the missing samples from a sparse sum of complex exponentials is the atomic norm minimization problem:
where
is the atomic norm of Aassociated with conv(A) (the convex hull of A), defined by:
Equation (
9) is equivalent to the following semi-definite program (SDF):
where
denotes the Toeplitz matrix, whose first column is equal to
u;
and
c are Fourier series coefficients. By solving Equation (
11), the whole set
of consecutive Fourier series coefficients can be estimated. Then, the amplitudes and time delays can be estimated by the TV norm [
19].
2.3. Numerical Analysis
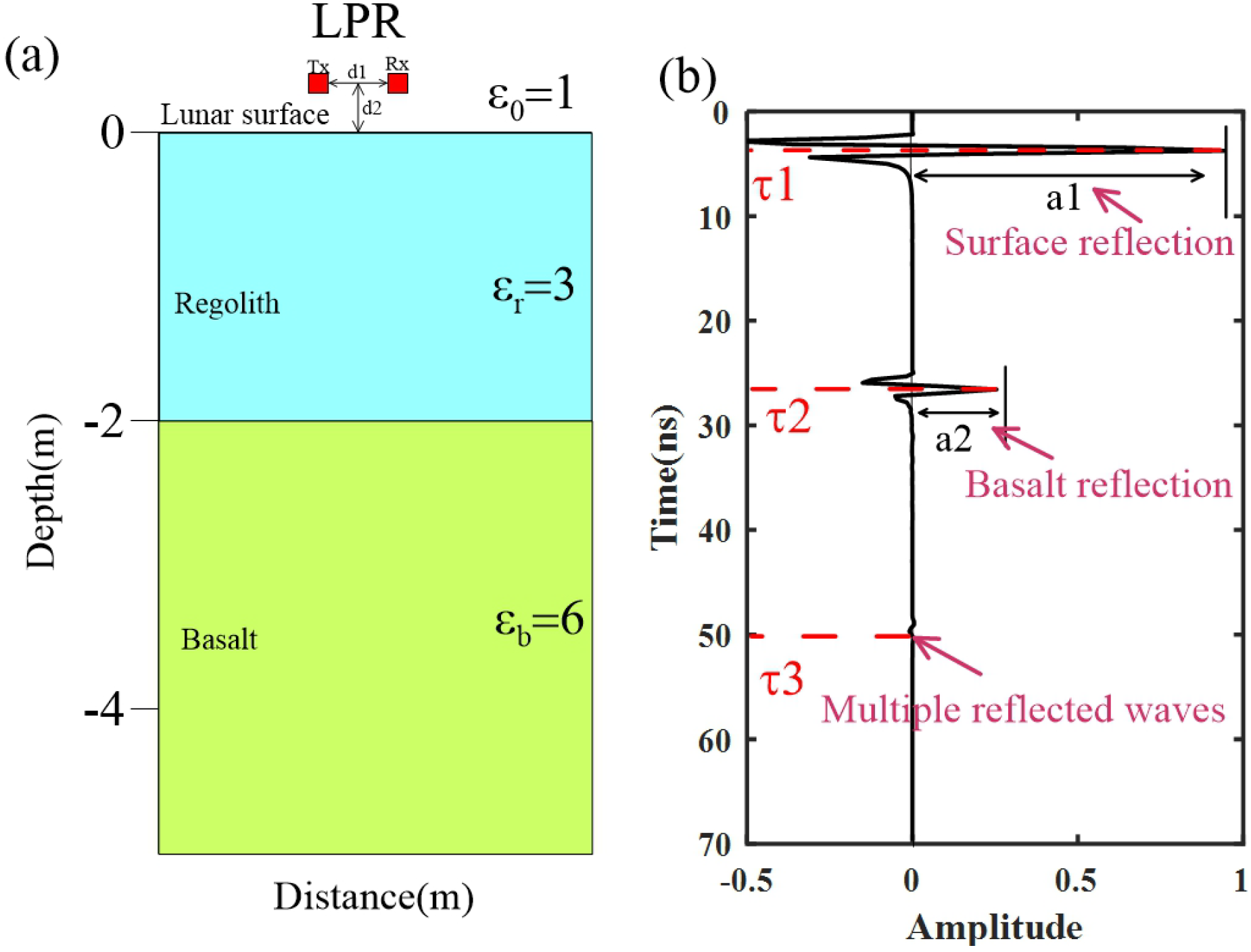
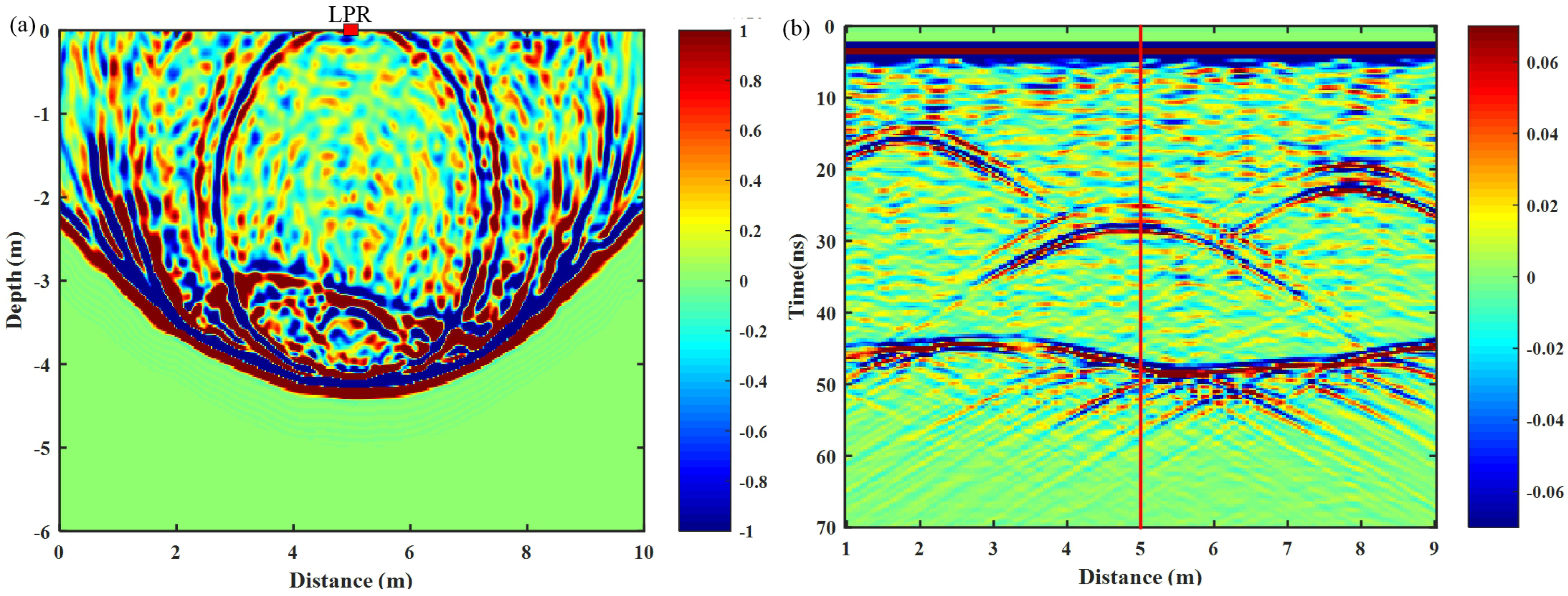
In this subsection, we present the performance analysis of the estimated parameters of the LPR data using the CS algorithm. In order to get
, one calculates the LPR response of a 1D simple lunar regolith model (
Figure 1a) using the finite-difference time-domain (FDTD) algorithm [
29]. The simulation parameter settings are consistent with CE-3 Channel 2 [
30] (
Table 1). The time step of the LPR is 0.3125 ns. Therefore, we need to sparse the simulation LPR data from 0.03125–0.3125 ns. The simulated amplitudes (
) and time delays (
) are listed in
Table 2.
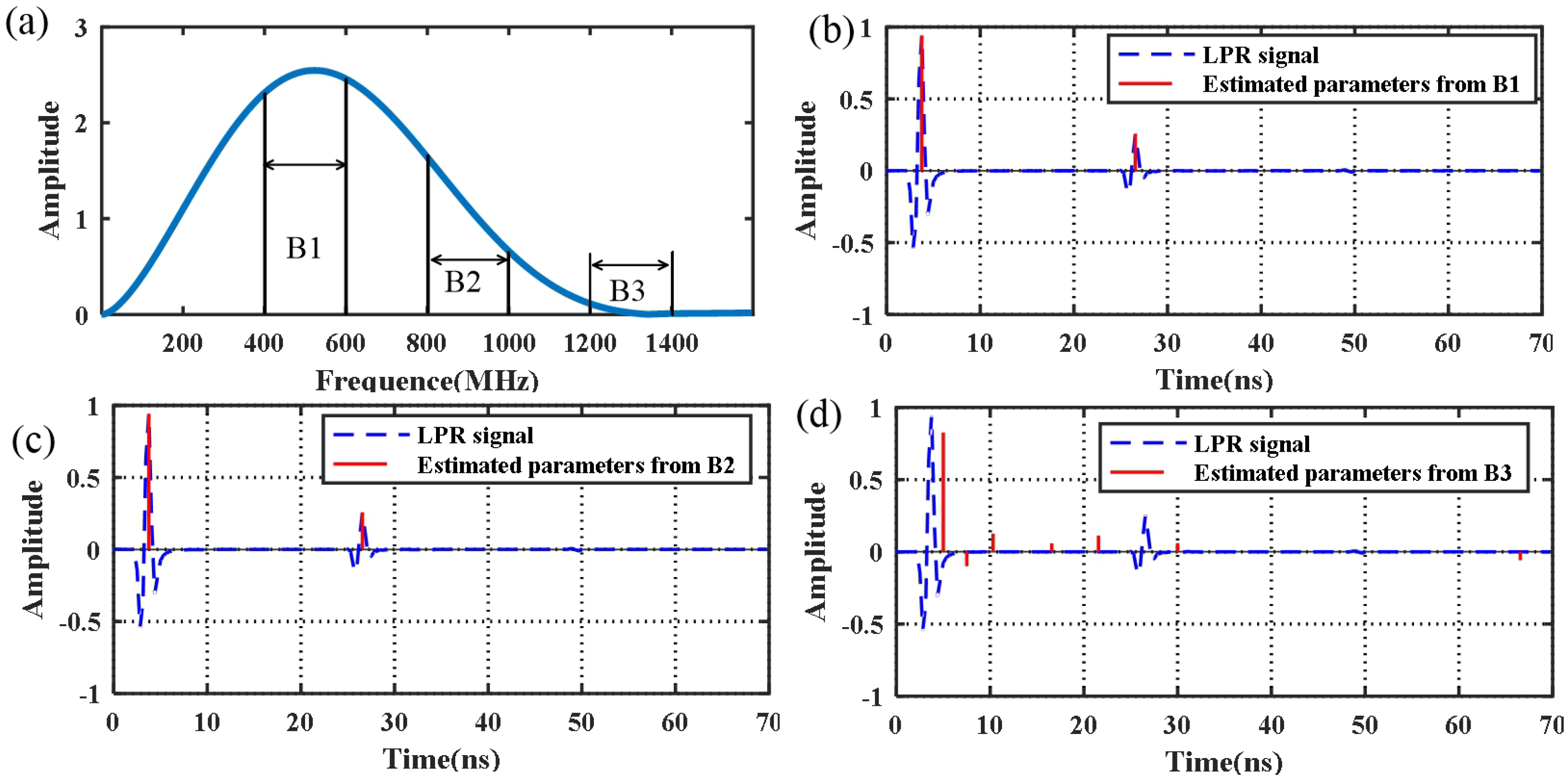
Figure 2a is the continuous time Fourier transformation (
) of a 500-MHz Ricker. Obviously, LPR is a kind of ultra-wideband radar (UWB) [
4] and has a large bandwidth (>1 GHz). In [
19], Xia et al. stated that one can reconstruct radar signals in a larger subset of entries
. In this study, we limited the bandwidth to improve the operational efficiency and increase the signal resolution from the noise.
For the first numerical experiment, we chose three subsets (Bandwidth 1 (B1), B2, B3;
Figure 2a) of
and randomly selected 30 random Fourier series. The B1 bandwidth is from 400–600 MHz with
; the B2 bandwidth is from 800–1000 MHz with
; and the B3 bandwidth is from 1200–1400 MHz with
.
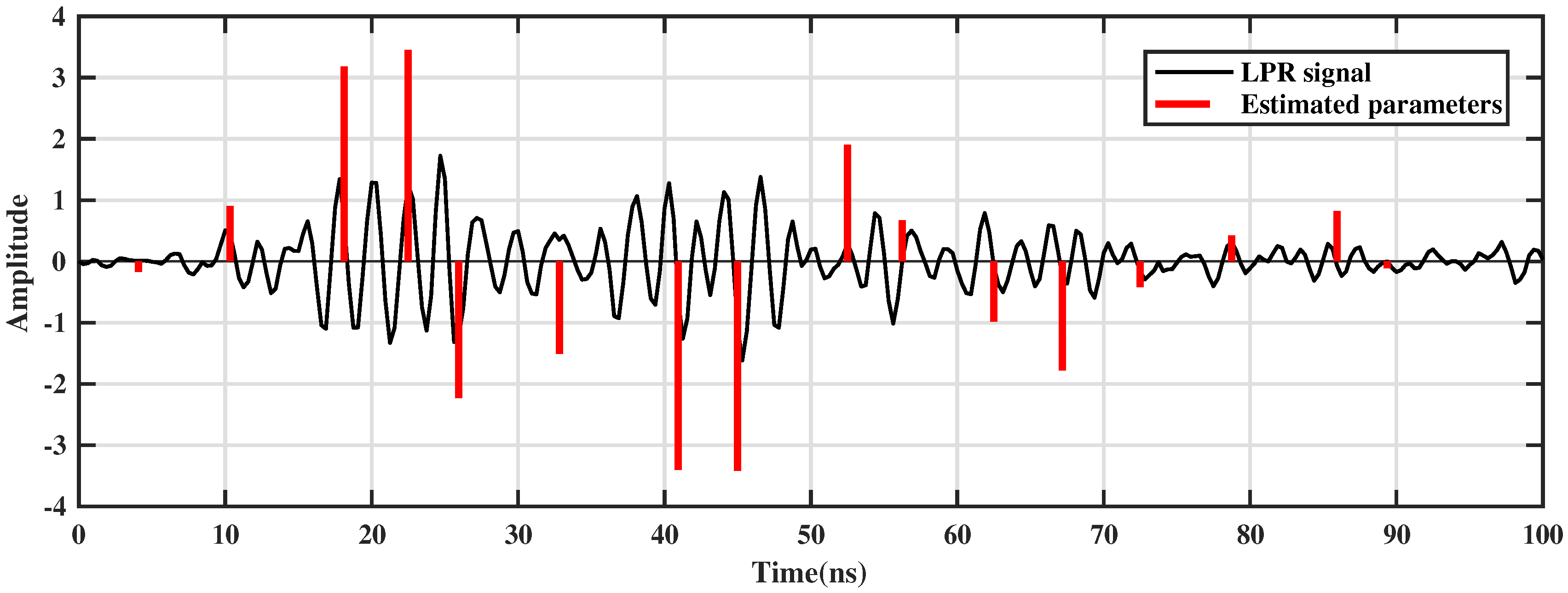
As this CS algorithm involves the random choice of parameters (Fourier coefficients), even if we set the same frequency band and number of Fourier coefficients, the estimated amplitudes and time delays will be different in each calculation (
Figure 3). Therefore, in order to evaluate the performance of the CS algorithm accurately, for the final value in the numerical experiment, we used the average value obtained by executing the algorithm 60 times, selected by checking the convergence of its results. The standard deviation information is given to describe the stability of the algorithm. In
Figure 3, the average value (AVG) is 0.2553 and the standard deviation (
) is 0.0025. Obviously, this CS algorithm is stable. To account for the possibility of processing data collected over a larger spatial scale, we recorded the time cost of the numerical experiments. The parameters of the computer used to execute the numerical experiment are listed in
Table 3.
Figure 2 shows the results of parameter estimation in different bandwidth subsets. The estimated amplitudes
and time delays
are listed in
Table 4. The relative error between the estimated value and the simulated value (
Table 2) is defined as err_rel (%).
According to the results, both B1 and B2 can estimate amplitudes and time delays very well, and the amplitudes calculated by B1 have more accurate results. However, in B3, as mentioned in the theorysection, since the smaller value of the Fourier series coefficients and a part of approximate to zero, the CS algorithm cannot accurately estimate the parameters. Considering that the center frequency of (500 MHz) is included in B1 ([400–600] MHz), we recognize that the CS algorithm can obtain an accurate estimation of the signal parameters from the LPR data using a random Fourier series subset within a limited bandwidth around the center frequency. To gain a better understanding of the performance and reliability of the algorithm and to identify the best settings (the number of Fourier series coefficients and the bandwidth extension), we conducted a second and third numerical experiment with a focus on controlling the variables.
In the second numerical experiment, the number of Fourier series was fixed to 30, and the frequency bandwidths were set at 30% (B4[425–575] MHz), 50% (B5[375–625] MHz), and 60% (B6[350–650] MHz) of the central frequency, with centering on the central frequency (500 MHz). The results are listed in
Table 5. From those results, the accuracy and reliability of the CS algorithm are satisfactory for the three frequency bands. When the frequency range is extended from B1–B5 MHz, there is a rather significant change of the algorithm performance: the error becomes higher and similar to the error obtained in B2. In order to achieve a better estimated accuracy over a larger bandwidth, the number of Fourier coefficients needs to be increased. In other words, the number of Fourier series needs to meet a certain density in the frequency band. However, the increase of Fourier series density reduces the randomness of the algorithm. In our CS algorithm, a random Fourier series can increase the resolution of the underlying signal in actual LPR data. We also noticed that, although a larger bandwidth can provide increased randomness in Fourier series selection, time costs and estimation errors increase: when the bandwidth increases from 150 to 300 MHz, the time cost increases by 2.5 times.
In the third numerical experiment, the frequency range was fixed to B1[400–600] MHz, and the number of Fourier series was set at 10 or 60. The results are listed in
Table 6. In this numerical experiment, we cannot accurately estimate the amplitude and time delay using a random Fourier series subset with 10 coefficients. The CS algorithm requires a sufficient number of Fourier series coefficients to ensure reliability. By doubling the number of Fourier coefficients (from 30 to 60), a higher stability of the algorithm can be achieved (in terms of smaller standard deviation) at a limited additional computational cost (only 20% longer execution time). Although we decided to work with 30 coefficients in this paper, in some future scenarios, it may be useful to use more coefficients. However, an increase in the number of Fourier series, such as the 60 Fourier series in
Table 6, means an increase in time cost and a decrease in randomness.
Therefore, considering the estimation error, randomness, and time cost, a random Fourier series subset with 30 coefficients chosen within 400–600 MHz is one of the best settings for 500-MHz LPR data processing. The CS algorithm can be executed on a personal computer. Single trace data can be processed in a few minutes. However, if, in some cases, we need to increase the frequency range and the number of Fourier series, the increase in time cost is inevitable. In addition, the time cost limitations of this CS algorithm are also possible when dealing with larger scale problems.
In order to assess the anti-interference ability and robustness of the CS algorithm, we designed the fourth and fifth numerical experiments with noise.
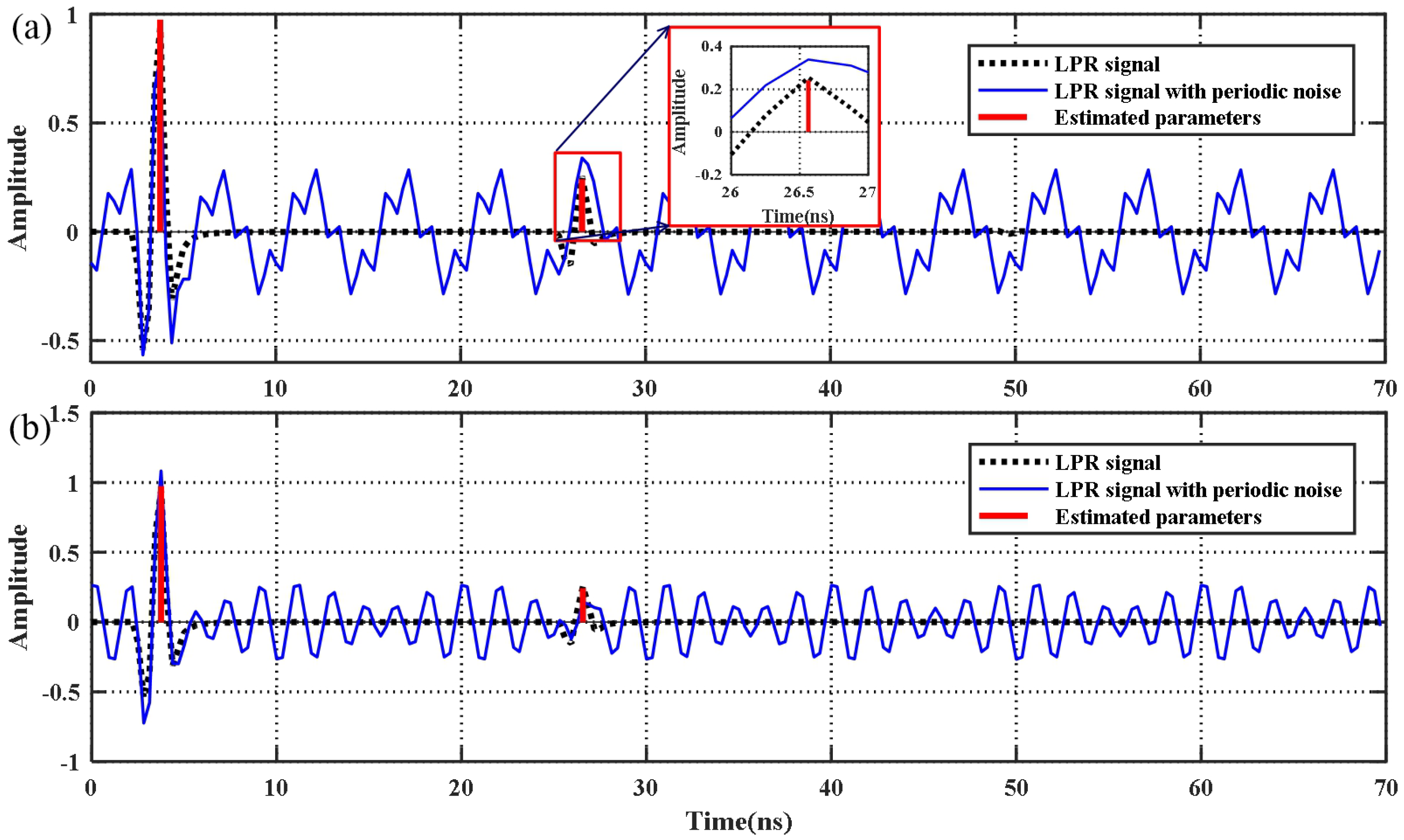
In the fourth numerical experiment, we added two sine interferences to
using Equation (
12) (
Figure 4).
where (
,
) is the frequency of the sine interference and was set at (200 MHz, 800 MHz) and (450 MHz, 550 MHz). The parameter values were estimated by the CS algorithm using 30 random Fourier series in B1(400–600 MHz). The results are listed in
Table 7. The accuracy of the CS algorithm is satisfactory. Since the Fourier series in our CS algorithm is discontinuous and random, although 450 and 550 MHz are included in the frequency range (400∼600 MHz), we can still accurately estimate the amplitude and time delays.
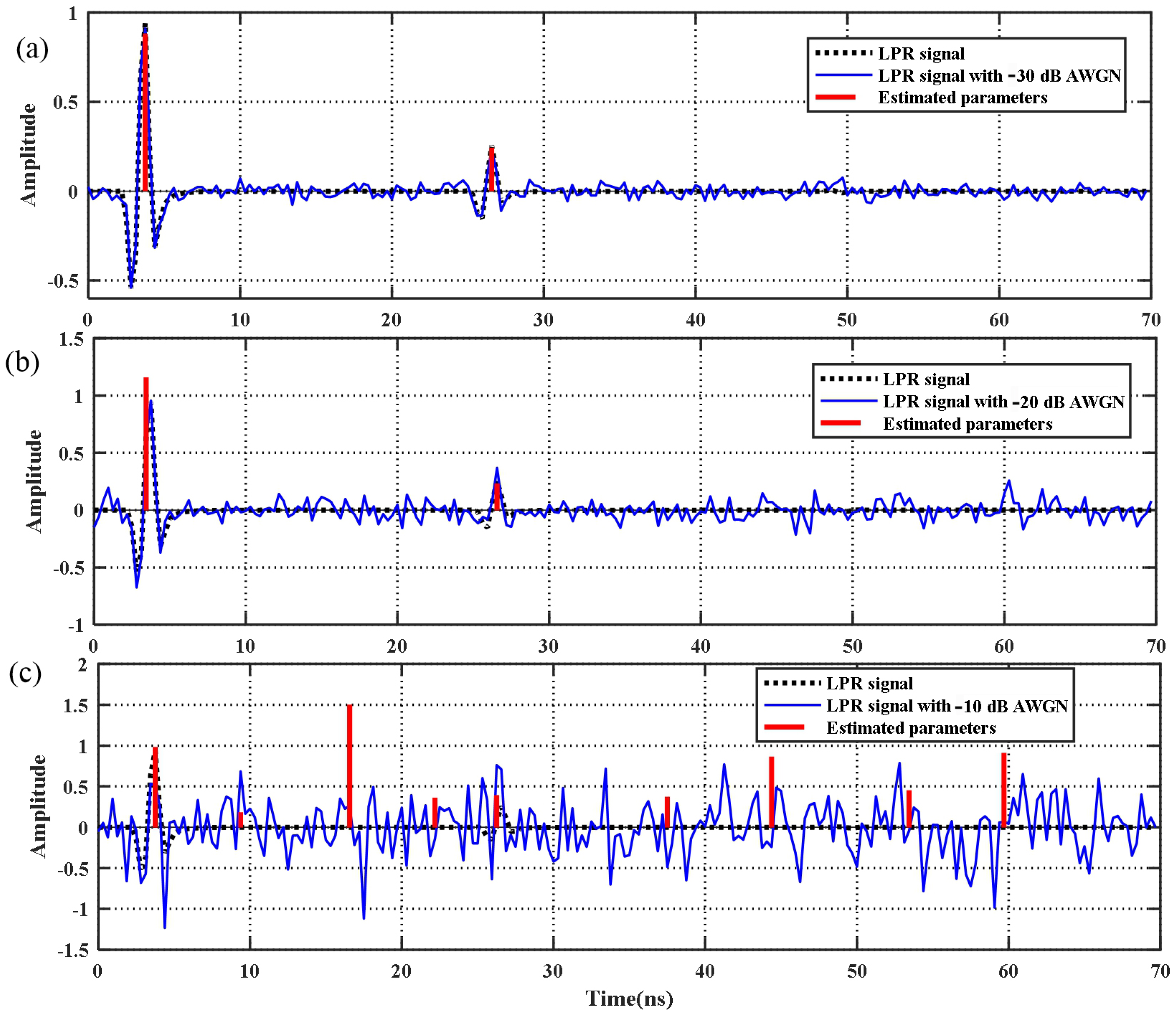
In the fifth numerical experiment, we added −30, −20, and −10 dB of additive white Gaussian noise (AWGN) to
(
Figure 5). The noise level is defined by the following formula:
where
is the noise signal power and
is the original signal power.
The parameter values were determined by the CS algorithm using 30 random Fourier series in B1(400–600 MHz). The results are listed in
Table 8.
Obviously, the signal parameters can be accurately estimated from signals with noise in general (
Figure 5a,b). Due to the wide frequency range of the AWGN, when the noise level is 10 dB (
Figure 5c), the CS algorithm cannot distinguish between the reflection signal and the false waveform generated by the AWGN. This requires researchers to apply their judgment in practical applications.
These numerical experiments indicate that the CS algorithm used with a random Fourier series can estimate a target’s signal parameters from noisy LPR data. This CS algorithm can reconstruct the amplitudes and time delays with high efficiency and high precision under an appropriate bandwidth and Fourier series.

















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}