1. Introduction
In recent decades, object-based image analysis has become a new paradigm in remote sensing [
1,
2,
3]. Furthermore, in recent years, object-based classification for Polarimetric Synthetic Aperture Radar (PolSAR) images has become more and more popular [
4,
5,
6,
7,
8,
9,
10,
11,
12]. Image segmentation is an important pre-processing step in image interpretation and analysis, and object detection, recognition, and tracking [
13]. However, the state-of-the-art segmentation algorithms, such as the Fractal Net Evolution Approach (FNEA) [
14], mean shift [
13], spectral clustering [
15], Simple Linear Iterative Clustering (SLIC) [
16], and Statistical Region Merging (SRM) [
17], are mostly designed for optical images. It is therefore necessary to develop segmentation algorithms specifically for PolSAR data. To date, various PolSAR image segmentation algorithms have been proposed. These algorithms can be classified into three categories according to the segmentation results, as follows:
(1)
Conventional Segmentation Methods. The basic principle of these methods is merging the adjacent and homogeneous pixels into the same region, and dividing the heterogeneous pixels into different regions. The size and shape of the obtained regions vary with the image scenes. Dong et al., [
4] proposed using a Gaussian Markov Random Field (GMRF) model for PolSAR image segmentation and classification. For simplicity, this method uses a Gaussian distribution instead of a Gamma distribution, and it only uses the intensity information. Wu et al., [
5] proposed to use a Wishart Markov Random Field (WMRF) model and a Maximum
A Posteriori (MAP) criterion for PolSAR image segmentation. Compared with the GMRF model, the WMRF model is more in line with the characteristics of PolSAR data. Lombardo et al., [
18] derived a split-merge criterion based on a generalized maximum-likelihood approach, and then applied it to multi-frequency PolSAR image segmentation. Ayed et al., [
19] proposed to use maximum-likelihood approximation and efficient multiphase level-sets for PolSAR image segmentation. Yin and Yang [
20] proposed a modified level-set approach for multi-band PolSAR image segmentation. Zou et al., [
21] proposed to use a level-set method based on a heterogeneous cluster model for high-resolution PolSAR image segmentation. Yu et al., [
22] introduced the Iterative Region Growing with Semantics (IRGS) algorithm into PolSAR image segmentation and classification by incorporating a polarimetric feature model that is based on the Wishart distribution and modifying several key steps. Lang et al., [
23] proposed a Generalized SRM (GSRM) algorithm by modifying the original SRM model according to the characteristics of PolSAR images.
(2)
Superpixel Segmentation Methods. These methods segment an image into many small homogeneous regions with similar sizes. The main difference between the conventional segmentation approach and superpixel segmentation is that the latter approach limits the size of the segmented regions (and sometimes may also limit the shape and the edge smoothness). Ersahin et al., [
7] introduced the Spectral Graph Partitioning (SGP) algorithm into the PolSAR image processing field for segmentation and classification. Liu et al., [
8] first used the polarimetric information to detect edges, and then used the Normalized Cuts (Ncut) [
15] algorithm for PolSAR image superpixel segmentation. Spectral clustering methods have good noise immunity, and they can obtain segmented regions with similar sizes, compact shapes, and smooth edges, but they cannot preserve the point and linear objects. Hoekman et al., [
6] proposed using the region-growing algorithm for PolSAR image segmentation. This method first initializes some seed points, where each seed point stands for a region. It then divides the adjacent pixels whose distances from the central seed points are less than a certain threshold into the regions for which the central seed points stand. Similar to this method, the SLIC algorithm was introduced into PolSAR image segmentation by Qin et al., [
24], where a revised Wishart distance was adopted as the similarity measures. For heterogeneous urban areas, Xiang et al., [
25] introduced the Spherically Invariant Random Vectors (SIRV) model. The polarimetric homogeneity measurement that was proposed by Lang et al. [
26] was also used to automatically determine the tradeoff factor. Wang et al. further combined the Wishart distance and the SIRV distance [
27]. The integrated distance was calculated in a Directional Span-Driven Adaptive (DSDA) region and the superpixels are generated while using the entropy rate method.
(3)
Hierarchical Segmentation Methods. These methods, which are also known as
multi-scale segmentation methods, produce multi-level segmentation results in top-down or bottom-up order. The top level is the whole image, and the bottom level is a single pixel. All the levels of the segmentation results form a hierarchical structure. Beaulieu et al., [
28] proposed a hierarchical stepwise optimal algorithm that is based on the region-merging method for PolSAR image segmentation, where the segmentation criterion was derived from a complex Wishart distribution for homogeneous images and from a K-distribution for texture images. Since the texture model is not unique, Bombrun et al., [
29] introduced the SIRV model, which can describe a class of stochastic processes for PolSAR image hierarchical segmentation. To save the segmented results at different levels, Alonso-González et al., [
30] proposed the use of Binary Partition Trees (BPT) for PolSAR image multi-scale representation. The two main steps that are involved in BPT analysis are tree construction and tree pruning. Recently, Chen et al., [
31] proposed a multi-scale segmentation algorithm for high resolution PolSAR image by introducing superpixel segmentation and the
G0 distribution statistical heterogeneity into the FNEA algorithm.
This paper focuses on superpixel segmentation. When compared with the conventional segmentation approach, superpixel segmentation can produce small-scale regions with a similar size even in large homogeneous areas, preserving the statistical characteristics of the image. Therefore, superpixel segmentation is more suitable for the object-based classification algorithms that are based on statistics such as the Wishart classifier.
Mean shift segmentation is a commonly used segmentation algorithm. Because the segmentation result of the mean shift algorithm is often piecemeal, it is usually regarded as a superpixel segmentation algorithm. However, the conventional mean shift algorithm is designed only for optical images and cannot be directly used with PolSAR images. Recently, Lang et al., [
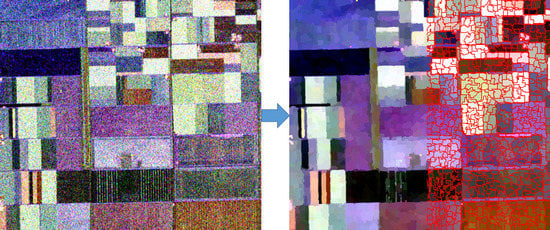
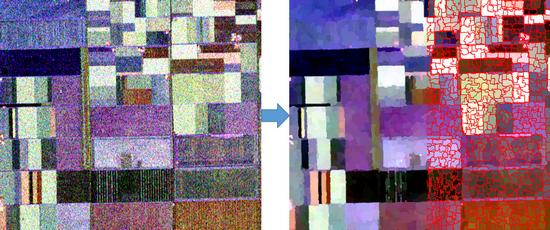
32] extended the conventional mean shift algorithm according to the characteristics of PolSAR images. The proposed Generalized Mean Shift (GMS) algorithm can be directly used for Synthetic Aperture Radar (SAR) and PolSAR image filtering, avoiding unnecessary information loss. In this paper, the GMS algorithm is further extended for the superpixel segmentation of PolSAR images.
The main contributions of this paper are as follows: (1) We propose a new merging predicate to be used for superpixel segmentation based on the basic GMS formula, and we further propose the GMS algorithm based on the new merging predicate. (2) To improve the accuracy of the segmentation, we introduce a pre-sorting strategy into the GMS segmentation algorithm after comparing the pre-sorting strategy and the row-column strategy used in the conventional mean shift segmentation algorithm. (3) To suppress the influence of speckle noise and preserve strong point targets, we introduce a post-processing step into the GMS segmentation algorithm.
The rest of this paper is organized as follows. Firstly, in
Section 2, we briefly review the materials and methods that are used in this study. A new merging predicate defined in the joint spatial-range domain is derived based on the GMS algorithm. A pre-sorting strategy and a post-processing step are introduced into the GMS segmentation algorithm.
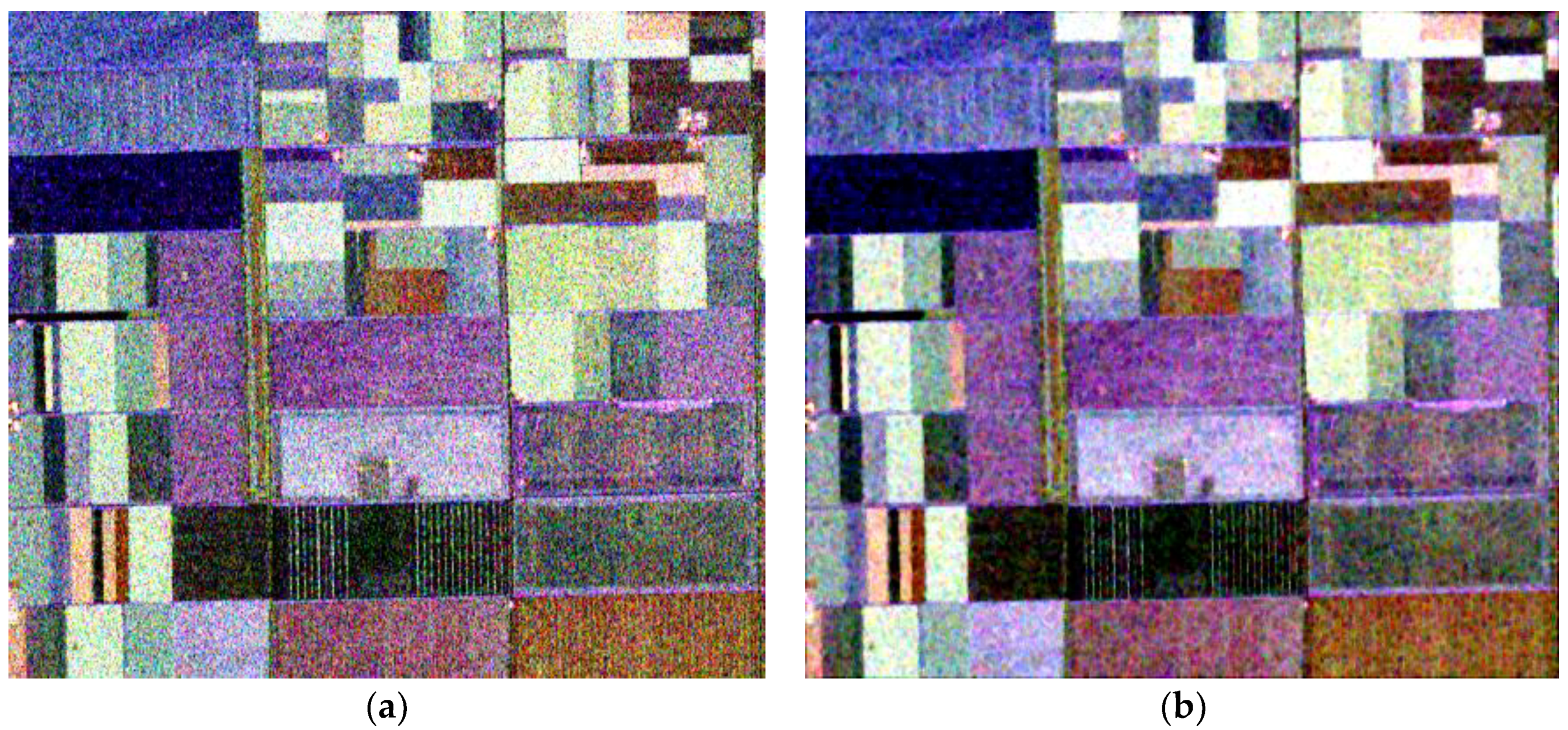
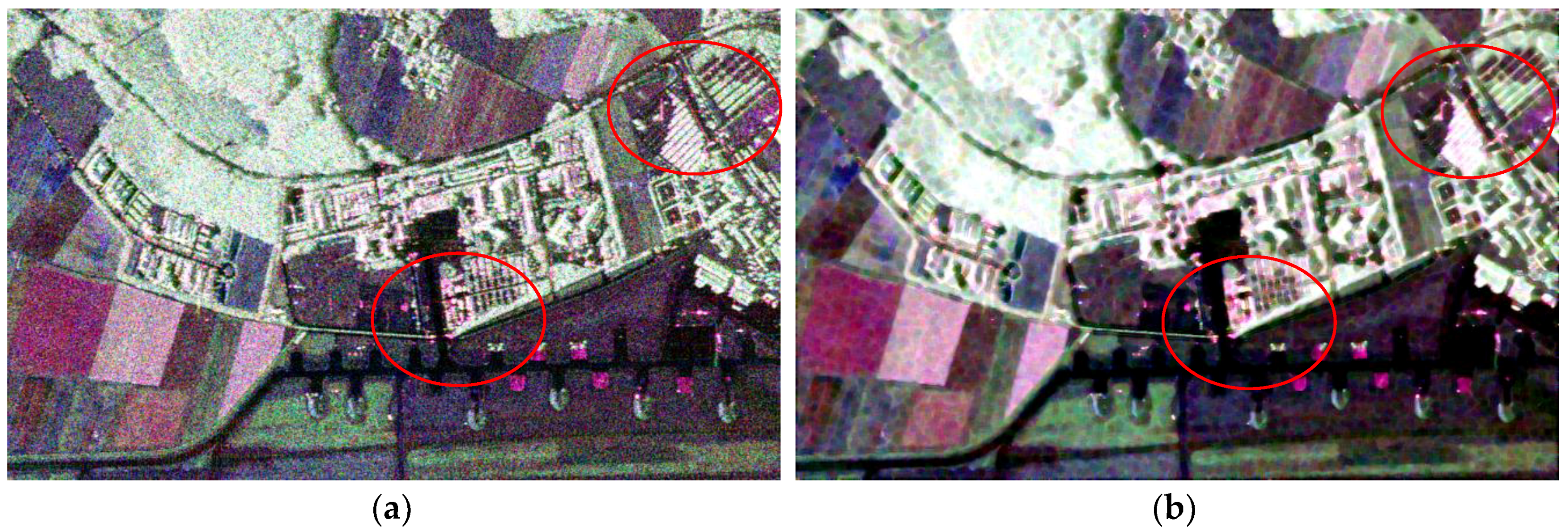
Section 3 describes the experimental results that were obtained with AirSAR and ESAR L-band PolSAR data and evaluates the effectiveness of the proposed algorithm. The parameter settings, stability, quality, and efficiency of the GMS segmentation algorithm are discussed in
Section 4. Finally, in
Section 5, we conclude the paper and summarize the next steps in this work.













{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}