
Influence of Snowy and Icy Weather on Vehicle Sideslip and Rollover: A Simulation Approach
Abstract
:1. Introduction
2. Literature Review
3. Methodology
3.1. Mechanical Analysis of Vehicle Lateral Instability
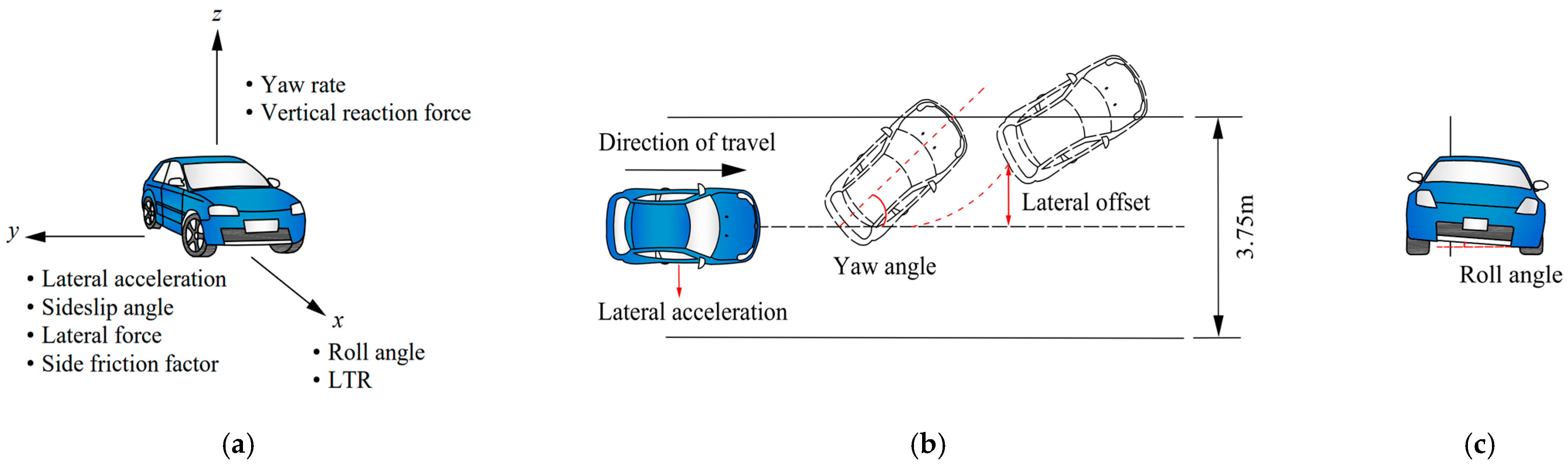
3.2. Evaluation Indicators
3.3. Simulation Modelling
3.3.1. Model Parameters Setting
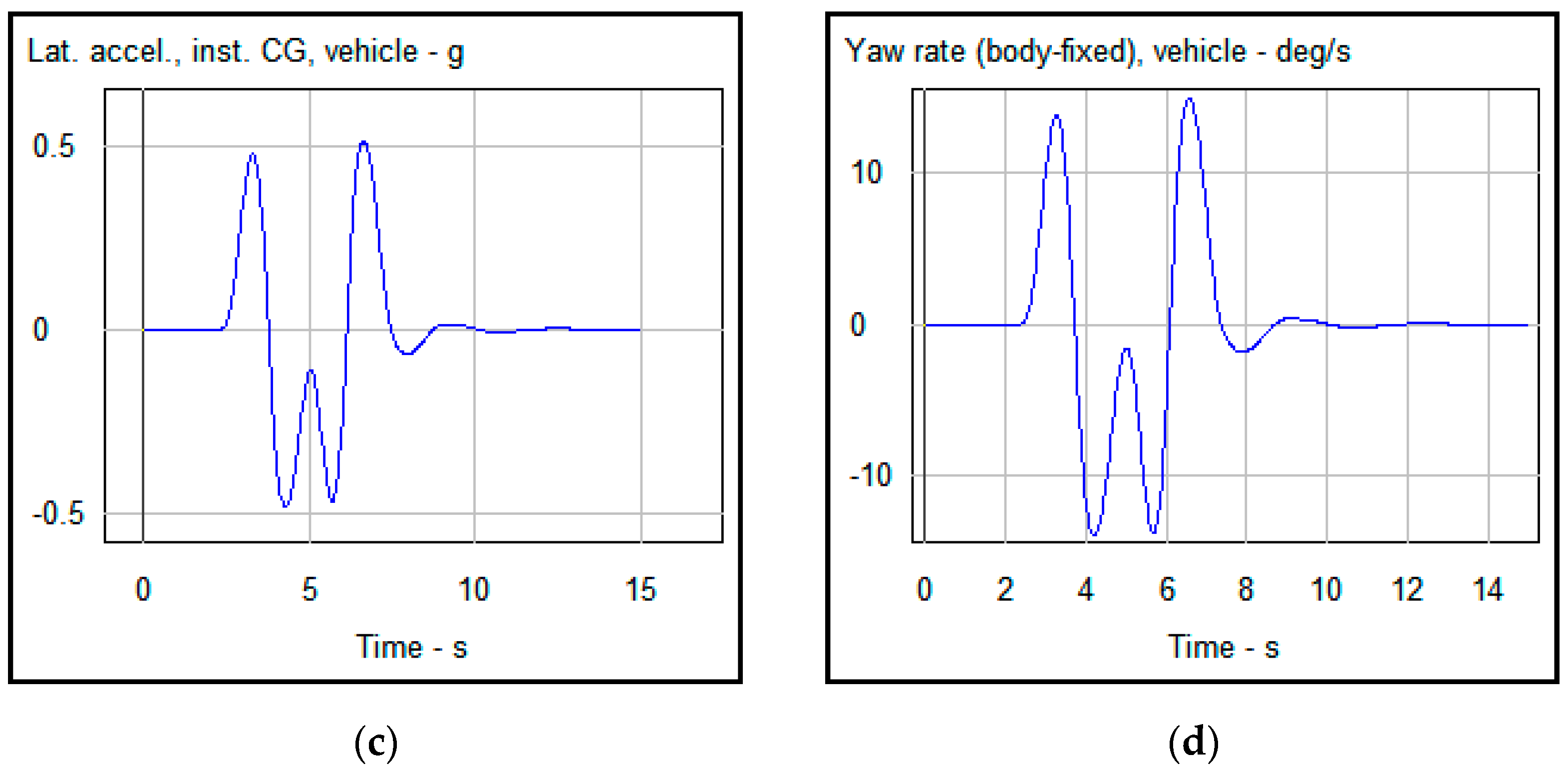
3.3.2. Double Lane Change Test
3.3.3. Simulation Strategies
4. Results
4.1. Influence of Speed on Vehicle Lateral Stability
4.2. Influence of Curve Radius on Vehicle Lateral Stability
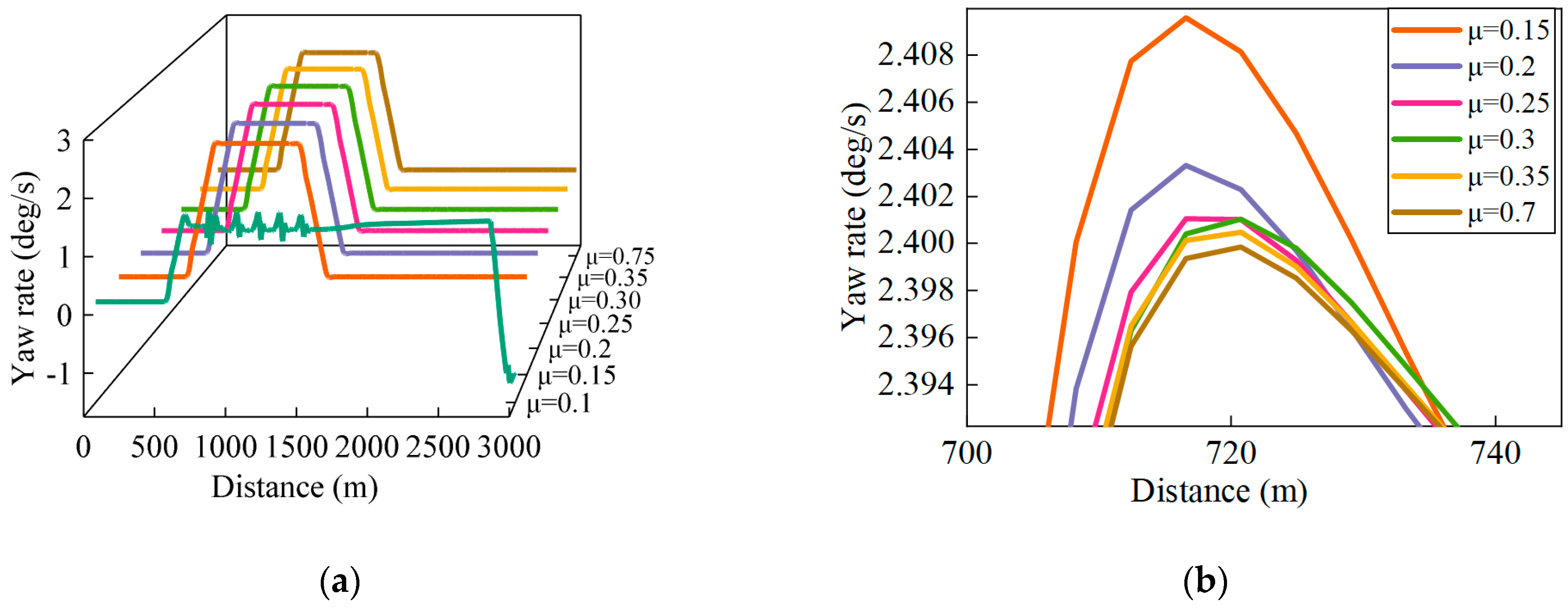
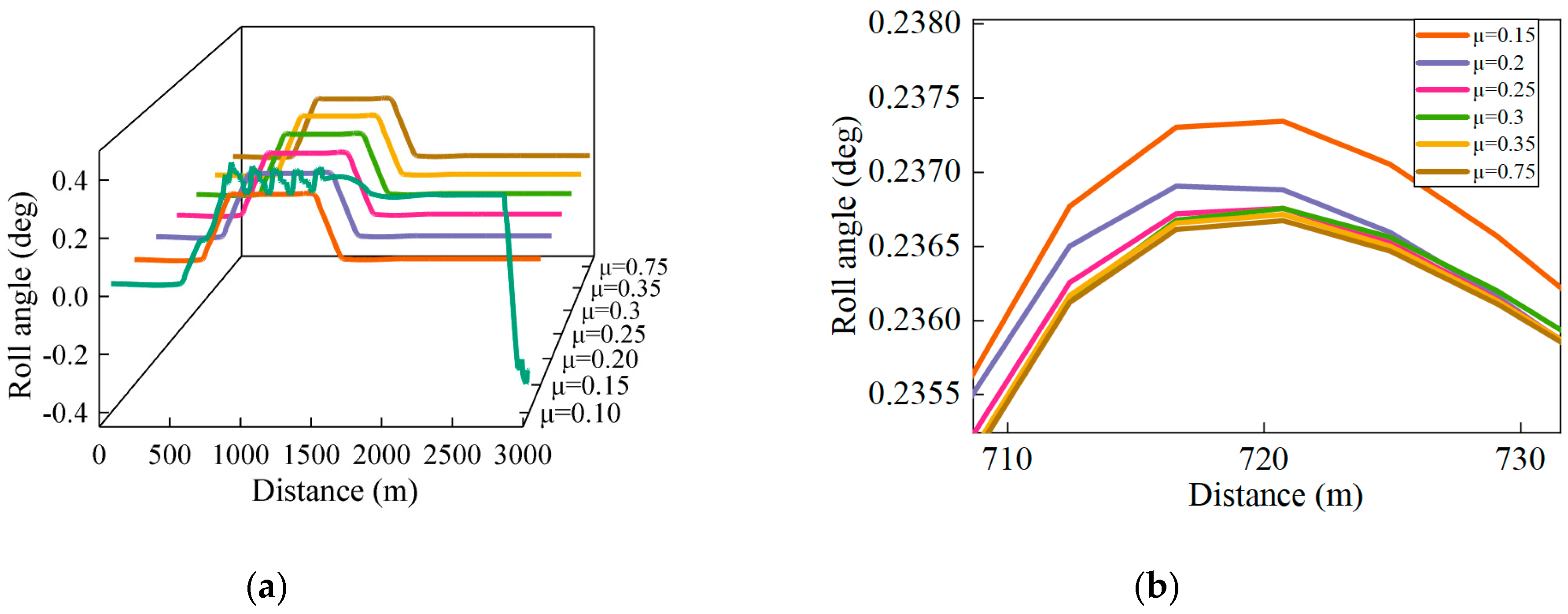
4.3. Influence of Road Adhesion Coefficient on Vehicle Lateral Stability
5. Discussion
5.1. Sensitivity Analysis of Lateral Instability Factors
5.2. Prevention of Lateral Instability Crashes
6. Conclusions
- (1)
- The lateral offset, representing the cumulative risk, and the roll angle, lateral acceleration, and yaw rate in the X-, Y-, and Z-axis directions of the vehicle’s three-dimensional kinematic coordinate system were selected as the indicators to represent the lateral instability of the vehicle in motion. The study also determined the thresholds for these indicators to identify occurrences of lateral instability. According to the study, speed and curve radius have a substantial influence on each evaluation indicator. However, snowy and icy roads have a relatively lower influence on vehicle driving. The higher their unfavorable values, the faster the evaluation indicators reach the dangerous state of lateral instability. As a result, the driver has less time to react and adjust their maneuvers, increasing the risk of a vehicle sideslip and rollover.
- (2)
- Curved roads are susceptible to sideslips and rollovers, especially at the entrance to the curve, where lateral instability is most likely to occur. Furthermore, lower curve radii increase the risk of lateral instability crashes. On straight roads, however, speed and snowy or icy conditions have minimal influence on the vehicle’s lateral stability. As such, vehicles may still drive on snowy roads safely at speeds up to 80 km/h. Sideslip incidents occur on icy and compacted-snow roads, while rollover incidents are more likely on slushy and loose-snow roads. Multiple factors contribute to vehicle lateral instability incidents in snowy and icy weather, with a smaller curve radius and greater speed posing the greatest risk. In particular, the curve radius has the largest influence on sideslip, whereas speed has the biggest influence on rollover.
- (3)
- In adverse circumstances, establishing a reasonable speed limit is an important approach to enhancing road traffic safety. To prevent lateral instability, a calculation model for the dynamic speed threshold of vehicles is developed, taking into account the road adhesion coefficient and curve radius. This model is applicable to a variety of snowy and icy weather conditions.The road traffic management department might determine the appropriate speed limit value by considering the curve radius of various road sections and the change in snowy and icy road conditions. Through dynamic variable information signs, accurate road information is provided for drivers. Combined with intelligent and connected technology, the driver’s behavior is modified.
- (4)
- This study deeply analyzes the influencing factors and mechanisms of driving safety in snowy and icy weather. It provides potential theoretical insights and practical measures for the road traffic management departments with the goal of improving overall traffic safety in extreme snowy and icy weather conditions. However, there are some limitations. On the one hand, only the influence factors on driving safety are discussed. In the follow-up study, we can explore the interactions between different influencing factors and go further into the rules to take more targeted measures. Furthermore, we plan to test the driving safety of low-grade roads in snowy and icy weather conditions, particularly those with poor alignment characteristics such as a small radius and a steep slope in mountainous and rural areas. At the same time, we will also consider testing the worst-case scenario of a snowstorm, which will make the research results more applicable. In addition, it is necessary to further improve the sensitivity analysis method of influencing factors so that it can solve more complicated risky driving environments, which can then be applied to more driving conditions, and provide more accurate prevention and control schemes.
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
Appendix A

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameters | Value |
|---|---|
| Sprung mass | 1165 (kg) |
| Height of center of mass | 520 (mm) |
| Front overhang | 1110 (mm) |
| Rear overhang | 1756 (mm) |
| Roll inertia | 671.3 (kg/m2) |
| Pitch inertia | 1972.8 (kg/m2) |
| Yaw inertia | 2315.3 (kg/m2) |
| Front tire | 180/65 R15 |
| Rear tire | 180/65 R15 |
| Front wheelbase | 1550 (mm) |
| Rear wheelbase | 1550 (mm) |
| ABS | √ |
| Front wheel torque | 500 (N * m/Mpa) |
| Rear wheel braking torque | 250 (N * m/Mpa) |
| Number | Coordinate | Elevation | |
|---|---|---|---|
| X | Y | ||
| K6+000 | 3,138,271.952 | 419,012.987 | 70.794 |
| K6+020 | 3,138,252.846 | 419,018.720 | 70.594 |
| K6+032 | 3,138,240.070 | 419,019.825 | 70.415 |
| K6+040 | 3,138,232.908 | 419,019.866 | 70.247 |
| K6+060 | 3,138,212.908 | 419,019.888 | 69.659 |
| K6+062 | 3,138,210.070 | 419,019.870 | 69.464 |
| K6+080 | 3,138,192.910 | 419,019.605 | 68.603 |
| K6+120 | 3,138,152.945 | 419,017.971 | 66.672 |
| K6+130 | 3,138,142.822 | 419,017.395 | 66.275 |
| K6+140 | 3,138,132.979 | 419,016.804 | 65.882 |
| K6+155 | 3,138,117.893 | 419,015.545 | 65.463 |
| K6+160 | 3,138,113.066 | 419,014.977 | 65.367 |
| K6+180 | 3,138,093.349 | 419,011.656 | 64.733 |
| K6+200 | 3,138,073.961 | 419,006.770 | 64.146 |
| K6+220 | 3,138,055.025 | 419,000.351 | 63.621 |
| K6+221 | 3,138,053.702 | 418,999.838 | 63.518 |
| K6+240 | 3,138,036.395 | 418,993.075 | 62.972 |
| K6+258 | 3,138,018.907 | 418,986.241 | 62.421 |
| K6+260 | 3,138,017.767 | 418,985.796 | 62.348 |
| K6+280 | 3,137,999.058 | 418,978.726 | 61.798 |
| K6+299 | 3,137,980.501 | 418,972.131 | 61.220 |
| K6+300 | 3,137,980.212 | 418,972.032 | 61.135 |
| K6+320 | 3,137,961.302 | 418,965.521 | 60.624 |
| K6+340 | 3,137,942.392 | 418,959.009 | 60.038 |
| K6+360 | 3,137,923.481 | 418,952.498 | 59.426 |
| K6+375 | 3,137,908.435 | 418,947.317 | 58.865 |
| K6+380 | 3,137,904.573 | 418,945.981 | 58.653 |
| K6+400 | 3,137,885.223 | 418,940.981 | 57.882 |
| K6+460 | 3,137,825.628 | 418,941.805 | 55.342 |
| K6+464 | 3,137,820.861 | 418,942.922 | 54.901 |
| K6+480 | 3,137,806.089 | 418,946.051 | 54.206 |
| K6+500 | 3,137,786.243 | 418,948.463 | 53.233 |
| K6+503 | 3,137,783.082 | 418,948.663 | 53.140 |
| K6+520 | 3,137,766.296 | 418,949.908 | 52.365 |
| K6+540 | 3,137,746.431 | 418,952.211 | 51.445 |
| K6+560 | 3,137,726.689 | 418,955.404 | 50.524 |
| K6+580 | 3,137,707.111 | 418,959.481 | 49.604 |
| K6+600 | 3,137,687.736 | 418,964.433 | 48.683 |
| K6+620 | 3,137,668.602 | 418,970.251 | 47.762 |
| K6+640 | 3,137,649.750 | 418,976.922 | 47.221 |
| K6+644 | 3,137,645.453 | 418,978.578 | 46.630 |
References
- Alrejjal, A.; Farid, A.; Ksaibati, K. A correlated random parameters approach to investigate large truck rollover crashes on mountainous interstates. Accid. Anal. Prev. 2021, 159, 106233. [Google Scholar] [CrossRef]
- National Center for Statistics and Analysis. 2020: A Compilation of Motor Vehicle Crash Data (Report No. DOT HS 813 375). National Highway Traffic Safety Administration. Available online: https://www.safetylit.org/citations/index.php?fuseaction=citations.viewdetails&citationIds%5B%5D=citreport_525_12 (accessed on 15 November 2022).
- Mergia, W.Y.; Eustace, D.; Chimba, D.; Qumsiyeh, M. Exploring factors contributing to injury severity at freeway merging and diverging locations in Ohio. Accid. Anal. Prev. 2013, 55, 202–210. [Google Scholar] [CrossRef]
- Black, A.W.; Mote, T.L. Effects of winter precipitation on automobile collisions, injuries, and fatalities in the United States. J. Transp. Geo. 2015, 48, 165–175. [Google Scholar] [CrossRef]
- Yu, H.; Yuan, R.; Li, Z.; Zhang, G.; Ma, D.T. Identifying heterogeneous factors for driver injury severity variations in snow-related rural single-vehicle crashes. Accid. Anal. Prev. 2020, 144, 105587. [Google Scholar] [CrossRef]
- FHWA Road Weather Management, Snow and Ice. Available online: https://ops.fhwa.dot.gov/weather/weather_events/snow_ice.htm (accessed on 23 December 2021).
- Brázdil, R.; Chromá, K.; Zahradníček, P. Weather and traffic accidents in the Czech Republic, 1979–2020. Theor. Appl. Climatol. 2022, 149, 153–167. [Google Scholar] [CrossRef]
- Becker, N.; Rust, H.W.; Ulbrich, U. Weather impacts on various types of road crashes: A quantitative analysis using generalized additive models. Eur. Transp. Res. Rev. 2022, 14, 37. [Google Scholar] [CrossRef]
- Malin, F.; Norros, I.; Innamaa, S. Accident risk of road and weather conditions on different road types. Accid. Anal. Prev. 2019, 122, 181–188. [Google Scholar] [CrossRef]
- City of Edmonton. “Motor Vehicle Collisions”. Available online: https://www.edmonton.ca/transportation/traffic_safety/motor-vehicle-collisions.aspx (accessed on 17 December 2022).
- Kim, D.; Jung, S.; Yoon, S. Risk Prediction for Winter Road Accidents on Expressways. Appl. Sci. 2021, 11, 9534. [Google Scholar] [CrossRef]
- Snow Cover. Available online: https://ru.wikipedia.org/wiki/ (accessed on 25 March 2023).
- FHWA Road Weather Management—Winter Maintenance Virtual Clearinghouse: Technical Briefs. Available online: https://ops.fhwa.dot.gov/weather/resources/publications/tech_briefs/tech_briefs.htm (accessed on 13 March 2022).
- Salt Smart Transportation Association of Canada. Available online: https://www.yumpu.com/en/document/view/11245246/salt-smart-transportation-association-of-canada (accessed on 25 March 2023).
- Pang, J.; Krathaus, A.; Benedyk, I.; Ahmed, S.S.; Anastasopoulos, P.C. A temporal instability analysis of environmental factors affecting accident occurrences during snow events: The random parameters hazard-based duration model with means and variances heterogeneity. Anal. Methods Accid. Res. 2022, 34, 100215. [Google Scholar] [CrossRef]
- Shaheed, M.S.; Gkritza, K.; Carriquiry, A.L.; Hallmark, S.L. Analysis of Occupant Injury Severity in Winter Weather Crashes: A Fully Bayesian Multivariate Approach. Anal. Methods Accid. Res. 2016, 11, 33–47. [Google Scholar] [CrossRef]
- Maze, T.H.; Agarwal, M.; Burchett, G. Whether Weather Matters to Traffic Demand, Traffic Safety, and Traffic Operations and Flow. Transp. Res. Rec. 2006, 1948, 170–176. [Google Scholar] [CrossRef]
- Wang, Y.; Liang, L.; Evans, L. Fatal crashes involving large numbers of vehicles and weather. J. Safety Res. 2017, 63, 1–7. [Google Scholar] [CrossRef]
- Abohassan, A.; El-Basyouny, K.; Kwon, T.J. Exploring the associations between winter maintenance operations, weather variables, surface condition, and road safety: A path analysis approach. Accid. Anal. Prev. 2021, 163, 106448. [Google Scholar] [CrossRef]
- Hallmark, B.; Dong, J. Developing Roadway Safety Models for Winter Weather Conditions Using a Feature Selection Algorithm. J. Adv. Transp. 2020, 2020, 8824943. [Google Scholar] [CrossRef]
- Zhu, Y.; Li, H.; Wang, K.; Bao, Y.; Zeng, P. A Simulation Study for Lateral Stability Control of Vehicles on Icy Asphalt Pavement. J. Adv. Transp. 2022, 6, 7361881. [Google Scholar] [CrossRef]
- Shin, J.; Lee, I. Reliability analysis and reliability-based design optimization of roadway horizontal curves using a first-order reliability method. Eng. Optim. 2015, 47, 622–641. [Google Scholar] [CrossRef]
- Tian, L.; Li, Y.; Li, J.; Lv, W. A simulation based large bus side slip and rollover threshold study in slope-curve section under adverse weathers. PLoS ONE 2021, 16, e0256354. [Google Scholar] [CrossRef]
- Juga, I.; Nurmi, P.; Hippi, M. Statistical modelling of wintertime road surface friction. Met. Apps. 2013, 20, 318–329. [Google Scholar] [CrossRef]
- Peters, S.C.; Iagnemma, K. Stability measurement of high-speed vehicles. Veh. Syst. Dyn. 2009, 47, 701–720. [Google Scholar] [CrossRef]
- Yan, M.; Xu, J.; Han, S.; Xin, T.; Wang, O.; Yi, Z.; Liu, Z. Permitted speed decision of single-unit trucks with emergency braking maneuver on horizontal curves under rainy weather. PLoS ONE 2021, 16, e0261975. [Google Scholar] [CrossRef]
- Alrejjal, A.; Ksaibati, K. Impact of combined alignments and different weather conditions on vehicle rollovers. KSCE J. Civ. Eng. 2022, 26, 893–906. [Google Scholar] [CrossRef]
- Alrejjal, A.; Ksaibati, K. Impact of combined alignments and adverse weather conditions on vehicle skidding. J. Traffic. Transp. Eng. 2023, 10, 116–131. [Google Scholar] [CrossRef]
- Xu, J.; Lv, W.; Gao, C.; Bi, Y.; Mu, M.; E, G. Why Do Drivers’ Collision Avoidance Maneuvers Tend to Cause SUVs to Sideslip or Rollover on Horizontal Curve and Grade Combinations?—An Analysis of the Causes Based on a Modified Multibody Dynamics Model. Int. J. Environ. Res. Public Health 2022, 19, 15877. [Google Scholar] [CrossRef]
- Aram, A. Effective safety factors on horizontal curves of two-lane highways. J. Appl. Sci. 2010, 10, 2814–2822. [Google Scholar] [CrossRef]
- Abdi Kordani, A.; Tavassoli, B.; Sabbaghian, M.H. Analyzing the Influence of Coinciding Horizontal Curves and Vertical Sag Curves on Side Friction Factor and Lateral Acceleration Using Simulation Modeling; International Symposium on Highway Geometric Design (ISHGD): Vancouver, BC, Canada, 2015. [Google Scholar]
- Wang, X.; Wang, T.; Tarko, A.P.; Tremont, P. The influence of combined alignments on lateral acceleration on mountainous freeways: A driving simulator study. Accid. Anal. Prev. 2015, 76, 110–117. [Google Scholar] [CrossRef]
- Alrejjal, A.; Ksaibati, K. Impact of mountainous interstate alignments and truck configurations on rollover propensity. J. Safety Res. 2022, 80, 160–174. [Google Scholar] [CrossRef]
- Yin, Y.; Wen, H.; Sun, L.; Hou, W. The Influence of Road Geometry on Vehicle Rollover and Skidding. Int. J. Environ. Res. Public Health 2020, 17, 1648. [Google Scholar] [CrossRef]
- Qu, G.; He, Y.; Sun, X.; Tian, J. Modeling of Lateral Stability of Tractor-Semitrailer on Combined Alignments of Freeway. Discrete Dyn. Nat. Soc. 2018, 2018, 8438921. [Google Scholar] [CrossRef]
- Jin, Z.; Li, J.; Huang, Y.; Khajepour, A. Study on Rollover Index and Stability for a Triaxle Bus. Chin. J. Mech. Eng. 2019, 32, 64. [Google Scholar] [CrossRef]
- Larish, C.; Piyabongkarn, D.; Tsourapas, V.; Rajamani, R. A new predictive lateral load transfer ratio for rollover prevention systems. IEEE Trans. Veh. Technol. 2013, 62, 2928–2936. [Google Scholar] [CrossRef]
- Mauriello, F.; Montella, A.; Pernetti, M.; Galante, F. An Exploratory Analysis of Curve Trajectories on Two-Lane Rural Highways. Sustainability 2018, 10, 4248. [Google Scholar] [CrossRef]
- Xu, J.; Luo, X.; Shao, Y. Vehicle trajectory at curved sections of two-lane mountain roads: A field study under natural driving conditions. Eur. Transp. Res. Rev. 2018, 10, 12. [Google Scholar] [CrossRef]
- Han, I.; Rho, K. Characteristic analysis of vehicle rollover accidents: Rollover scenarios and prediction/warning. Int. J. Automot. Technol. 2017, 18, 451–461. [Google Scholar] [CrossRef]
- Bae, J.; Kim, T.; Lee, W.; Shim, I. Curriculum Learning for Vehicle Lateral Stability Estimations. IEEE Acc. 2021, 9, 89249–89262. [Google Scholar] [CrossRef]
- Guo, L.; Zhao, Y.; Li, L.; Ge, P.; Huang, X. Antisideslip and Antirollover Safety Speed Controller Design for Vehicle on Curved Road. Math. Probl. Eng. 2014, 2014, 253176. [Google Scholar]
- Yildiz, A.; Özel, M.A. A Comparative Study of Energy Consumption and Recovery of Autonomous Fuel-Cell Hydrogen–Electric Vehicles Using Different Powertrains Based on Regenerative Braking and Electronic Stability Control System. Appl. Sci. 2021, 11, 2515. [Google Scholar] [CrossRef]
- Abdi Kordani, A.; Javadi, S.; Fallah, A. The Effect of Shoulder on Safety of Highways in Horizontal Curves: With Focus on Roll Angle. KSCE J. Civ. Eng. 2018, 22, 3153–3161. [Google Scholar] [CrossRef]
- Behnood, A.; Al-Bdairi, N. Determinant of injury severities in large truck crashes: A weekly instability analysis. Saf. Sci. 2020, 131, 104911. [Google Scholar] [CrossRef]
- Deutermann, W. Characteristics of Fatal Rollover Crashes; National Center for Statistics and Analysis: Washington, DC, USA, 2002. [Google Scholar]
- Cheng, G.; Cheng, R.; Xu, L. Research on speed limit of highway horizontal curve based on roadside accident discrimination. J. Transp. Syst. Eng. Inf. Technol. 2020, 20, 223–227. [Google Scholar]
- Xin, T.; Xu, J.; Gao, C.; Sun, Z. Research on the speed thresholds of trucks in a sharp turn based on dynamic rollover risk levels. PLoS ONE 2021, 16, e0256301. [Google Scholar] [CrossRef]
- Gallen, R.; Hautière, N.; Cord, A.; Glaser, S. Supporting Drivers in Keeping Safe Speed in Adverse Weather Conditions by Mitigating the Risk Level. IEEE Trans. Intell. Transp. Syst. 2013, 14, 1558–1571. [Google Scholar] [CrossRef]
- Wang, B.; Hallmark, S.L.; Savolainen, P.T.; Dong, J. Examining vehicle operating speeds on rural two-lane curves using naturalistic driving data. Accid. Anal. Prev. 2018, 118, 236–243. [Google Scholar] [CrossRef] [PubMed]
- Zhang, M.; Hua, G.; Zhang, C.; Ogle, J. Research on the Horizontal Curve’s Radius under Coupling Effects of Uneven Adhesion Coefficient and Crosswind. J. Traffic. Transp. Eng. 2015, 2, 346–352. [Google Scholar] [CrossRef]
- Hansen, R.; Chang, K. Horizontal and Vertical Curvature and its Effects on Driver Passing Choice. Transp. Res. Rec. 2019, 2673, 734–742. [Google Scholar] [CrossRef]
- Wang, H.; Zhou, J.; Hu, C.; Chen, W. Vehicle Lateral Stability Control Based on Stability Category Recognition with Improved Brain Emotional Learning Network. IEEE Trans. Veh. Technol. 2022, 71, 5930–5943. [Google Scholar] [CrossRef]
- Sentouh, C.; Glaser, S.; Mammar, S. Advanced vehicle–infrastructure–driver speed profile for road departure accident prevention. Veh. Syst. Dyn. 2006, 44, 612–623. [Google Scholar] [CrossRef]
- You, K.; Sun, L.; Gu, W. Reliability-based risk analysis of roadway horizontal curves. J. Transp. Eng. 2012, 138, 1071–1081. [Google Scholar] [CrossRef]
- Dhahir, B.; Hassan, Y. Probabilistic, safety-explicit design of horizontal curves on two-lane rural highways based on reliability analysis of naturalistic driving data. Accid. Anal. Prev. 2019, 123, 200–210. [Google Scholar] [CrossRef]
- Zolali, M.; Mirbaha, B.; Layegh, M.; Behnood, H.R. A Behavioral Model of Drivers’ Mean Speed Influenced by Weather Conditions, Road Geometry, and Driver Characteristics Using a Driving Simulator Study. Adv. Civ. Eng. 2021, 3, 5542905. [Google Scholar] [CrossRef]
- Sivaramakrishnan, P.; Madhava Prakash, A.K.; Sekulić, D.M.; Jacobson, B.; Selvi, C.; Johannesen, S.M. Methods to introduce floating bridge motion and wind excitation on a model for the investigation of heavy vehicle dynamics. Appl. Math. Modell. 2022, 117, 118–141. [Google Scholar] [CrossRef]
- Jang, M.; Hwang, S.; Kim, J.; Nam, J. Overturning and rollover characteristics of a tractor through dynamic simulations: Effect of slope angle and obstacles on a hard surface. Biosyst. Eng. 2022, 219, 11–24. [Google Scholar] [CrossRef]
- Abdollahzadeh Nasiri, A.S.; Rahmani, O.; Abdi Kordani, A.; Karballaeezadeh, N.; Mosavi, A. Evaluation of Safety in Horizontal Curves of Roads Using a Multi-Body Dynamic Simulation Process. Int. J. Environ. Res. Public Health 2020, 17, 5975. [Google Scholar] [CrossRef]
- Sharf Aldeen, A.; Abdi Kordani, A.; Hosseinian, S.M.; Mehdi Nazar, M. Evaluation of the Application of Maximum Radius in Horizontal Curves Using Vehicle Dynamic Simulation. Adv. Civ. Eng. 2022, 18, 5237541. [Google Scholar] [CrossRef]
- Wang, L.; Li, S.; Hui, B. Simulation Analysis of the Distance between Tunnels at the Bridge-Tunnel Junction of Mountainous Expressway on Driving Safety Under Crosswinds. IEEE Acc. 2021, 9, 28514–28524. [Google Scholar] [CrossRef]
- Chu, D.; Li, Z.; Wang, J.; Wu, C.; Hu, Z. Rollover speed prediction on curves for heavy vehicles using mobile smartphone. Measurement 2018, 130, 404–411. [Google Scholar] [CrossRef]
- Ataei, M.; Khajepour, A.; Jeon, S. Model predictive rollover prevention for steer-by-wire vehicles with a new rollover index. Int. J. Control 2018, 93, 140–155. [Google Scholar] [CrossRef]
- Cheng, S.; Li, L.; Yan, B.; Liu, C.; Wang, X.; Fang, J. Simultaneous estimation of tire side-slip angle and lateral tire force for vehicle lateral stability control. Mech. Syst. Signal Process. 2019, 132, 168–182. [Google Scholar] [CrossRef]
- Prieto González, L.; Sanz Sánchez, S.; Garcia-Guzman, J.L.; Boada, M.J.L.; Boada, B. Simultaneous Estimation of Vehicle Roll and Sideslip Angles through a Deep Learning Approach. Sensors 2020, 20, 3679. [Google Scholar] [CrossRef]
- Yin, Y.; Wen, H.; Sun, L.; Hou, W. Study on the Influence of Road Geometry on Vehicle Lateral Instability. J. Adv. Transp. 2020, 6, 7943739. [Google Scholar] [CrossRef]
- Li, P.; Lam, J.; Lu, R.; Li, H. Variable-Parameter-Dependent Saturated Robust Control for Vehicle Lateral Stability. IEEE Trans. Control Syst. Technol. 2022, 30, 1711–1722. [Google Scholar] [CrossRef]
- Ikhsan, N.; Saifizul, A.; Ramli, R. The effect of vehicle and road conditions on rollover of commercial heavy vehicles during cornering: A simulation approach. Sustainability 2021, 13, 6337. [Google Scholar] [CrossRef]
- Xu, J.; Li, H.; Zhang, X.; Ma, F.; Sun, Z. The influence of freeway curve characteristics on drivers’ speed perception accuracy. PLoS ONE 2022, 17, e0267250. [Google Scholar] [CrossRef]
- QC/T480-1999; Criterion Thresholds and Evaluation of Controllability and Stability for Automobiles. State Machinery Industry Bureau: Beijing, China, 1999.
- ISO 3888-2:2011; Passenger Cars—Test Track for a Severe Lane-Change Maneuver. ISO: Geneva, Switzerland, 2011.
- EU Regulation 661/2009; Concerning Type-Approval Requirements for the General Safety of Motor Vehicles, Their Trailers and Systems, Components and Separate Technical Units Intended Therefor. European Parliament: Strasbourg, France; The Council of the European Union: Brussels, Belgium, 2009.
- Fan, L.; Lu, L.; Deng, W.; Lu, J.J. Role of vehicle trajectory and lateral acceleration in designing horizontal curve radius of off-ramp: A driving simulator based study. Adv. Transp. Stud. 2015, 36, 119–132. [Google Scholar]
- ISO 3888-2:2011. Available online: https://www.iso.org/standard/57253.html (accessed on 16 April 2023).
- EU Regulation No. 661/2009. Available online: https://eur-lex.europa.eu/legal-content/EN/TXT/PDF/?uri=CELEX:32009R0661 (accessed on 16 April 2023).
- ISO 4138:2004; Passenger Cars-Steady-State Circular Driving Behaviour-Open-Loop Test Methods. ISO: Geneva, Switzerland, 2004.
- Marino, R.; Scalzi, S.; Netto, M. Nested PID steering control for lane keeping in autonomous vehicles. Control Eng. Process. 2011, 19, 1459–1467. [Google Scholar] [CrossRef]
- Rafatnia, S.; Mirzaei, M. Estimation of reliable vehicle dynamic model using IMU/GNSS data fusion for stability controller design. Mech. Syst. Signal Process. 2022, 168, 108593. [Google Scholar] [CrossRef]
- Wang, Z.; Wang, J. Ultra-local model predictive control: A model-free approach and its application on automated vehicle trajectory tracking. Control Eng. Process. 2020, 101, 104482. [Google Scholar] [CrossRef]
- Ghandour, R.; Victorino, A.; Doumiati, M.; Charara, A. Tire/road friction coefficient estimation applied to road safety. In Proceedings of the 18th Mediterranean Conference on Control and Automation, MED’10, Marrakech, Morocco, 23–25 June 2010; pp. 1485–1490. [Google Scholar]
- Molan, A.M.; Kordani, A.A. Multi-Body Simulation Modeling of Vehicle Skidding and Roll over for Horizontal Curves on Longitudinal Grades. In Proceedings of the TRB 2014 Annual Meeting, Washington, DC, USA, 12–16 January 2014. [Google Scholar]
- Alrejjal, A.; Ksaibati, K. Impact of crosswinds and truck weight on rollover propensity when negotiating combined curves. Int. J. Transp. Sci. Technol. 2022, 12, 86–102. [Google Scholar] [CrossRef]
- Hou, G.; Chen, S.; Chen, F. Framework of simulation-based vehicle safety performance assessment of highway system under hazardous driving conditions. Transp. Res. Part C Emerg. Technol. 2019, 105, 23–36. [Google Scholar] [CrossRef]
- Yue, L.; Wang, H. An Optimization Design Method of Combination of Steep Slope and Sharp Curve Sections for Mountain Highways. Math. Probl. Eng. 2019, 4, 2416342. [Google Scholar] [CrossRef]
- Hassan, Y.; Easa, S.M.; Abd El Halim, A.O. State-of-the-art of three-dimensional highway geometric design. Can. J. Civ. Eng. 1998, 25, 500–511. [Google Scholar] [CrossRef]
- Lusetti, B.; Nouvelière, L.; Glaser, S.; Mammar, S. Experimental strategy for a system based curve warning system for a safe governed speed of a vehicle. In Proceedings of the 2008 IEEE Intelligent Vehicles Symposium, Eindhoven, The Netherlands, 4–6 June 2008; pp. 660–665. [Google Scholar]
- Lee, Y.H.; Deng, W. Speed Control Method for Vehicle Approaching and Traveling on a Curve. U.S. Patent 0740,096,3B2, 15 July 2008. [Google Scholar]
- Harms, I.M.; Brookhuis, K.A. Dynamic traffic management on a familiar road: Failing to detect changes in variable speed limits. Transp. Res. Part F Traffic Psychol. Behav. 2016, 38, 37–46. [Google Scholar] [CrossRef]
- Wen, H.Y.; Xue, G. Exploring the relationships between single-vehicle traffic accident and driver’s route familiarity on the mountainous highways. Cogn. Technol. Work. 2019, 21, 815–824. [Google Scholar] [CrossRef]
- Elvik, R. To what extent can theory account for the findings of road safety evaluation studies? Accid. Anal. Prev. 2004, 36, 841–849. [Google Scholar] [CrossRef] [PubMed]
- Sun, Q.; Xia, J.; He, J.; Foster, J.; Falkmer, T.; Lee, H. Towards unpacking older drivers’ visual-motor coordination: A gaze-based integrated driving assessment. Accid. Anal. Prev. 2018, 113, 85–96. [Google Scholar] [CrossRef]
- Hjelkrem, O.A.; Ryeng, E.O. Chosen risk level during car-following in adverse weather conditions. Accid. Anal. Prev. 2016, 95, 227–235. [Google Scholar] [CrossRef]
- Kim, K.; Guan, H.; Wang, B.; Guo, R.; Liang, F. Active Steering Control Strategy for Articulated Vehicles. Front. Inf. Technol. Electron. Eng. 2016, 17, 576–586. [Google Scholar] [CrossRef]


















| Sideslip | Rollover | Note | |
|---|---|---|---|
| Schematic |  | , : Reaction force of road on tires F: Centrifugal force G: Vehicle gravity R: Curve radius : Superelevation : Speed (m/s) : Speed (km/h) : Gravitational acceleration (9.8 m/) : Lateral force parallel to the road : Vertical force perpendicular to the road : Lateral friction coefficient, : Road adhesion coefficient : Vehicle center height : Wheelbase | |
| Mechanical analysis | (1) (2) (3) The lateral inclination α of the road surface is generally small, ,, so that: (4) For a car not to sideslip, the lateral force should be less than or equal to the lateral frictional resistance between the tire and the road, i.e.,: (5) Finally, we get: (6) | For the vehicle not to roll over, the overturning moment should be less than or equal to the stabilizing moment, i.e.,: (7) Since is much smaller than , then: (8) Finally, we get: (9) | |
| References | Lateral Acceleration | Yaw Angle | Roll Angle | Sideslip Angle | LTR | Lateral Force | Lateral Offset | Vertical Reaction Force | Side Friction Factor |
|---|---|---|---|---|---|---|---|---|---|
| Shin and Lee, 2015 [22] | √ | √ | √ | √ | √ | √ | |||
| Kordan et al., 2018 [44] | √ | √ | √ | ||||||
| Chu et al., 2018 [63] | √ | √ | √ | √ | √ | √ | |||
| Qu et al., 2018 [35] | √ | √ | √ | ||||||
| Dhahir and Hassan, 2018 [56] | √ | √ | √ | ||||||
| Ataei et al. 2018 [64] | √ | √ | √ | √ | |||||
| Mauriello et al. 2018 [38] | √ | ||||||||
| Cheng et al., 2019 [65] | √ | √ | √ | √ | |||||
| Jin et al., 2019 [36] | √ | √ | √ | √ | √ | ||||
| Nasiri, 2020 [60] | √ | √ | |||||||
| González et al., 2020 [66] | √ | √ | |||||||
| Yin et al., 2020 [67] | √ | √ | √ | √ | |||||
| Li et al., 2022 [68] | √ | √ | |||||||
| Wang et al., 2021 [62] | √ | √ | |||||||
| Tian et al., 2021 [23] | √ | √ | |||||||
| Xin et al., 2021 [48] | √ | √ | |||||||
| Ikhsan et al. 2021 [69] | √ | √ | √ | ||||||
| Wang et al. 2022 [53] | √ | √ | √ | √ | √ | ||||
| Xu et al., 2022 [70] | √ | √ | √ | √ | |||||
| Zhu et al., 2022 [21] | √ | √ | √ | √ | √ |
| Number | Speed (km/h) | Curve Radius (m) | Road Adhesion Coefficient | Simulation Strategy |
|---|---|---|---|---|
| 1 | 30 | 400 | 0.10 | Speed acting independently |
| 2 | 40 | |||
| 3 | 50 | |||
| 4 | 60 | |||
| 5 | 70 | |||
| 6 | 80 | |||
| 7 | 80 | 400 | 0.10 | Curve radius acting independently |
| 8 | 500 | |||
| 9 | 600 | |||
| 10 | 700 | |||
| 11 | 800 | |||
| 12 | 900 | |||
| 13 | 1000 | |||
| 14 | 80 | 400 | 0.10 | Road adhesion coefficient acting independently |
| 15 | 0.15 | |||
| 16 | 0.20 | |||
| 17 | 0.25 | |||
| 18 | 0.30 | |||
| 19 | 0.35 | |||
| 20 | 0.75 (contrast) |
| Snowy and Icy Road Type | Critical State | ||||||||||
|---|---|---|---|---|---|---|---|---|---|---|---|
| Icy road | Road adhesion coefficient | 0.10 | 0.11 | 0.12 | 0.13 | 0.14 | 0.15 | ||||
| Critical speed (km/h) | 54.6 | 55.3 | 55.7 | 56.3 | 56.6 | 57.3 | |||||
| Critical state | Sideslip | Sideslip | Sideslip | Sideslip | Sideslip | Sideslip | |||||
| Compacted snow road | Road adhesion coefficient | 0.16 | 0.17 | 0.18 | 0.19 | 0.20 | |||||
| Critical speed (km/h) | 58.2 | 58.6 | 58.8 | 59.2 | 59.8 | ||||||
| Critical state | Sideslip | Sideslip | Sideslip | Sideslip | Sideslip | ||||||
| Snow slushy road | Road adhesion coefficient | 0.21 | 0.22 | 0.23 | 0.24 | 0.25 | |||||
| Critical speed (km/h) | 60.2 | 60.5 | 61.0 | 61.2 | 61.4 | ||||||
| Critical state | Rollover | Rollover | Rollover | Rollover | Rollover | ||||||
| Loose snow road | Road adhesion coefficient | 0.26 | 0.27 | 0.28 | 0.29 | 0.30 | 0.31 | 0.32 | 0.33 | 0.34 | 0.35 |
| Critical speed (km/h) | 62.0 | 62.6 | 62.9 | 63.1 | 63.7 | 63.9 | 64.1 | 64.6 | 64.6 | 65.0 | |
| Critical state | Rollover | Rollover | Rollover | Rollover | Rollover | Rollover | Rollover | Rollover | Rollover | Rollover | |
| Curve Radius (m) | Speed Threshold (km/h) | |||
|---|---|---|---|---|
| Icy Road (0.10~0.15) | Compacted Snow Road (0.10~0.20) | Snow Slushy Road (0.15~0.25) | Loose Snow Road (0.25~0.35) | |
| 100 | 19.8 | 20.3 | 22.5 | 24.3 |
| 200 | 31.2 | 32.2 | 38.4 | 40.6 |
| 300 | 43.8 | 45.6 | 50.7 | 57.7 |
| 400 | 50.4 | 52.3 | 57.3 | 61.4 |
| 500 | 55.5 | 56.9 | 65.8 | 68.4 |
| 600 | 62.3 | 63.8 | 71.3 | 75.4 |
| 700 | 66.9 | 68.5 | 76.0 | 79.3 |
| 800 | 73.4 | 75.4 | 81.1 | 85.2 |
| 900 | 75.3 | 80.6 | 87.5 | 90.1 |
| 1000 | 78.2 | 85.3 | 92.5 | 96.8 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Wang, Q.; Zhao, Y.; Li, L.; Kong, L.; Si, W. Influence of Snowy and Icy Weather on Vehicle Sideslip and Rollover: A Simulation Approach. Sustainability 2024, 16, 888. https://doi.org/10.3390/su16020888
Wang Q, Zhao Y, Li L, Kong L, Si W. Influence of Snowy and Icy Weather on Vehicle Sideslip and Rollover: A Simulation Approach. Sustainability. 2024; 16(2):888. https://doi.org/10.3390/su16020888
Chicago/Turabian StyleWang, Qingzhou, Yaxuan Zhao, Lujia Li, Liying Kong, and Wenjing Si. 2024. "Influence of Snowy and Icy Weather on Vehicle Sideslip and Rollover: A Simulation Approach" Sustainability 16, no. 2: 888. https://doi.org/10.3390/su16020888