
Distributed Generation and Load Modeling in Microgrids


Abstract
:1. Introduction
2. Solar DG Models
2.1. Sandia Array Performance Model (SAPM)
2.2. Luft Model
2.3. Improvement on the Luft Model
2.4. Hadj Arab et al. Model
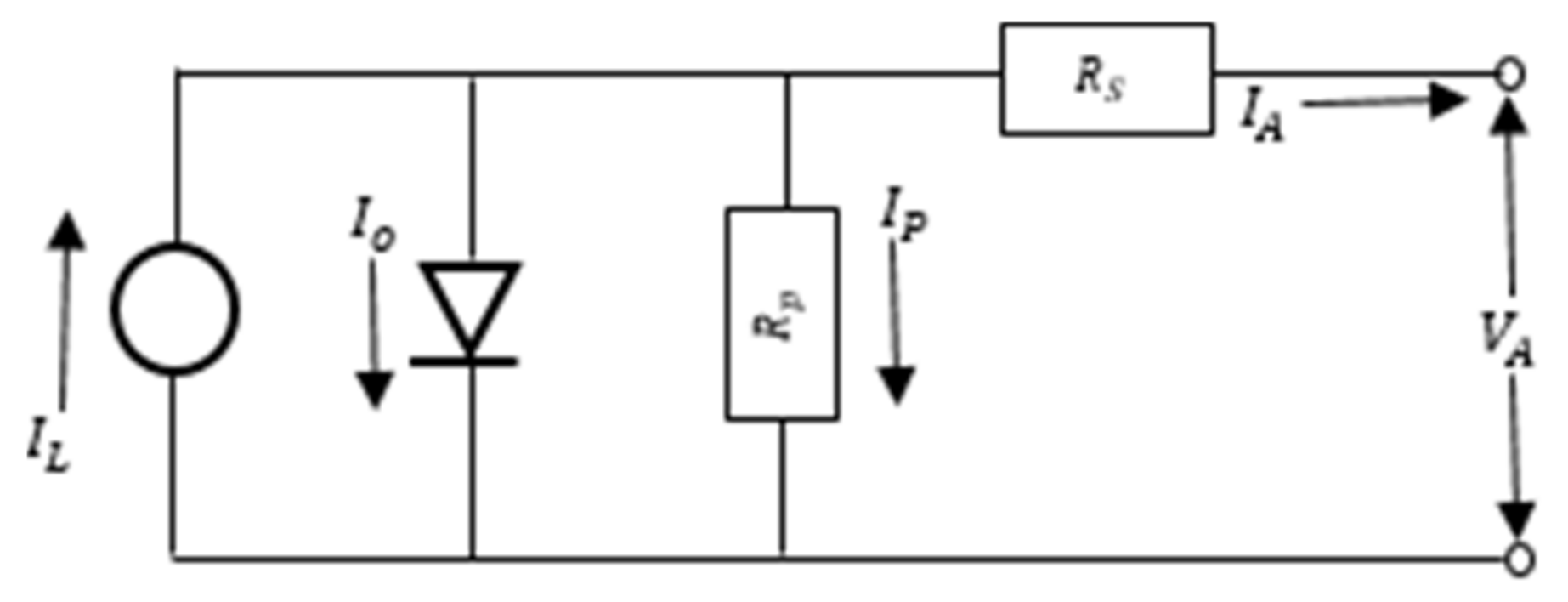
2.5. Improved 5-Parameter Model
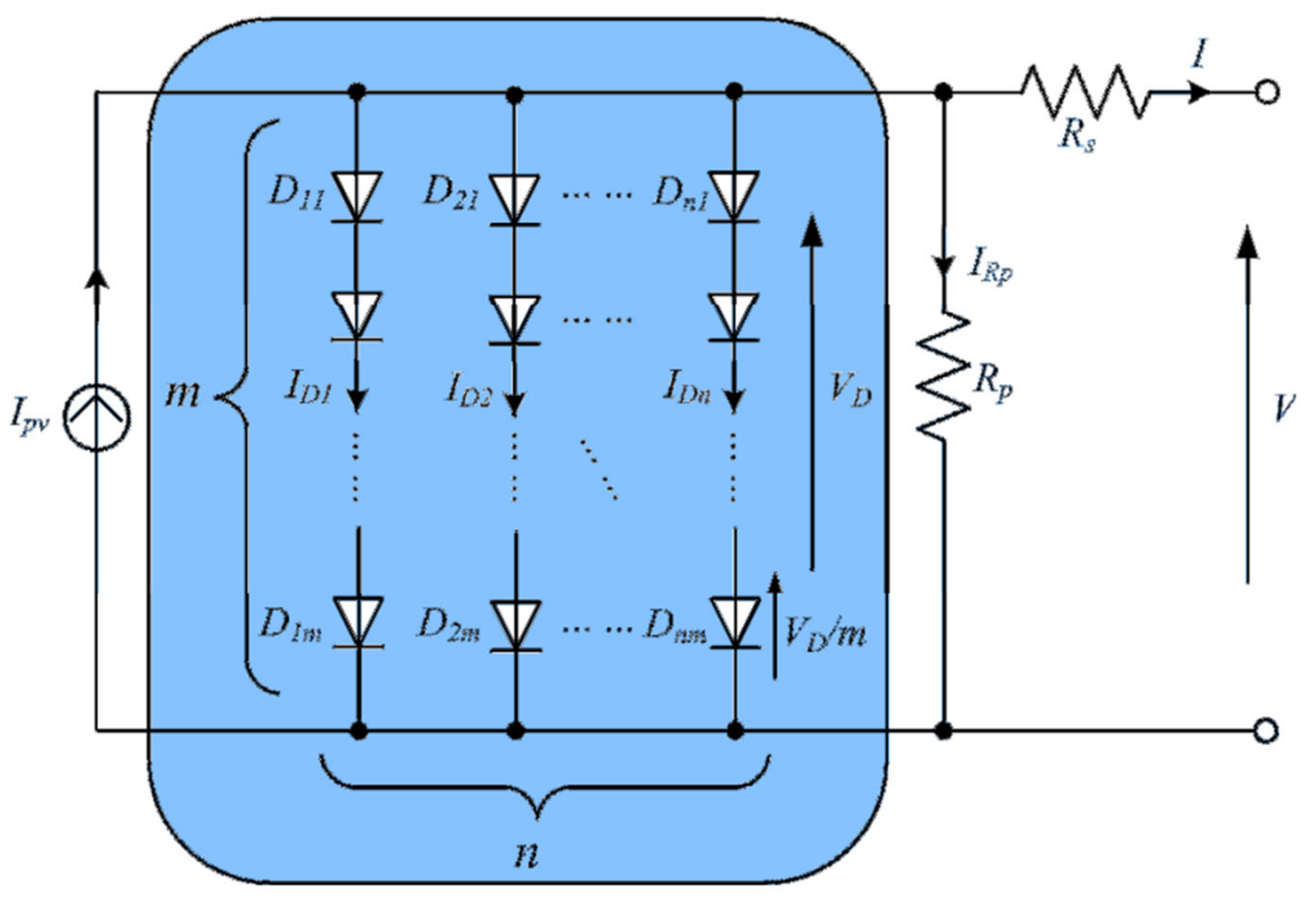
2.6. 7-Parameter Model and Multidimensional Model
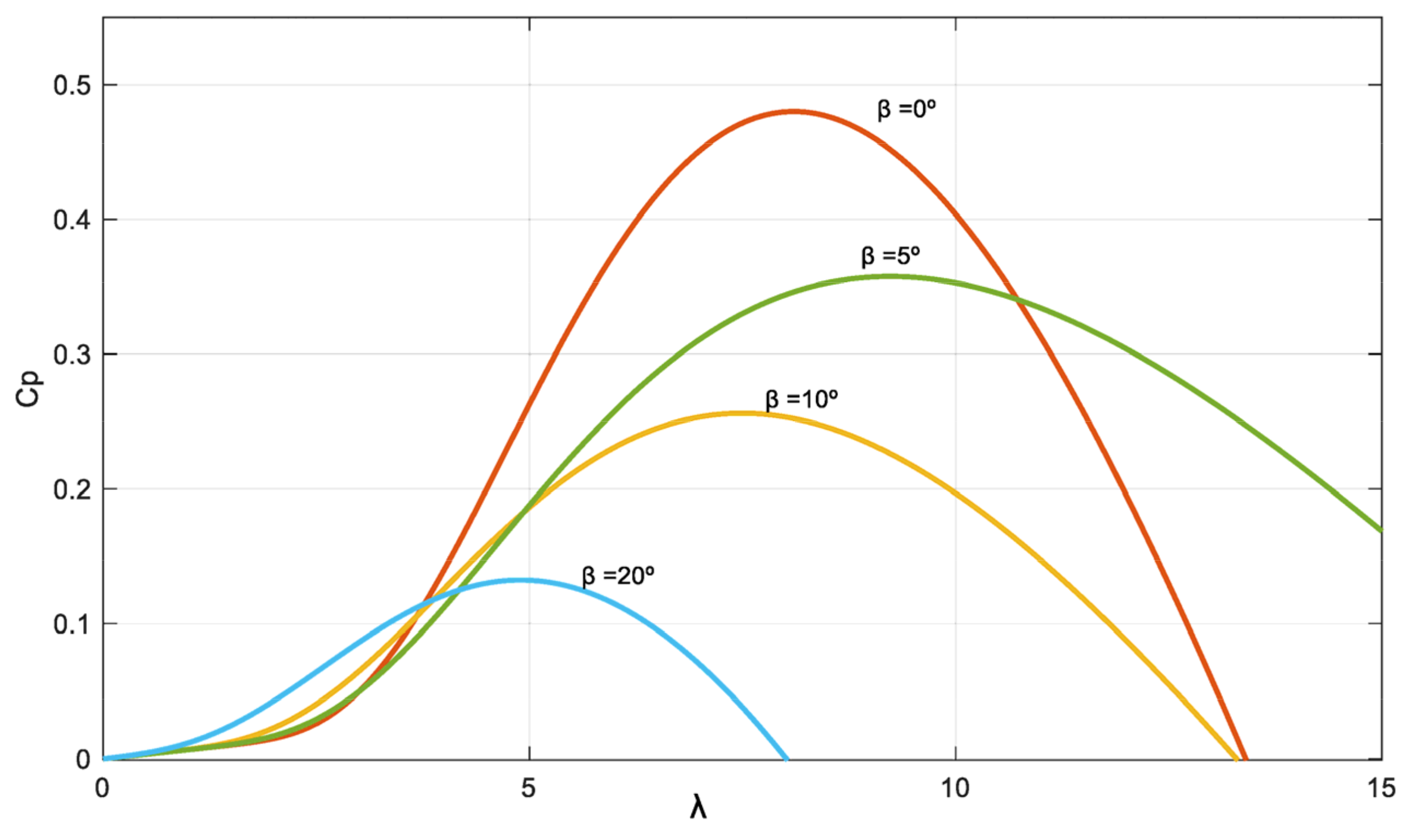
3. Wind DG Model
4. Battery Energy Storage System Models
4.1. Third-Order Battery Model
4.2. Simple Battery Model
5. Microgrid Load Modeling
6. Simulating Power Output of DG Models
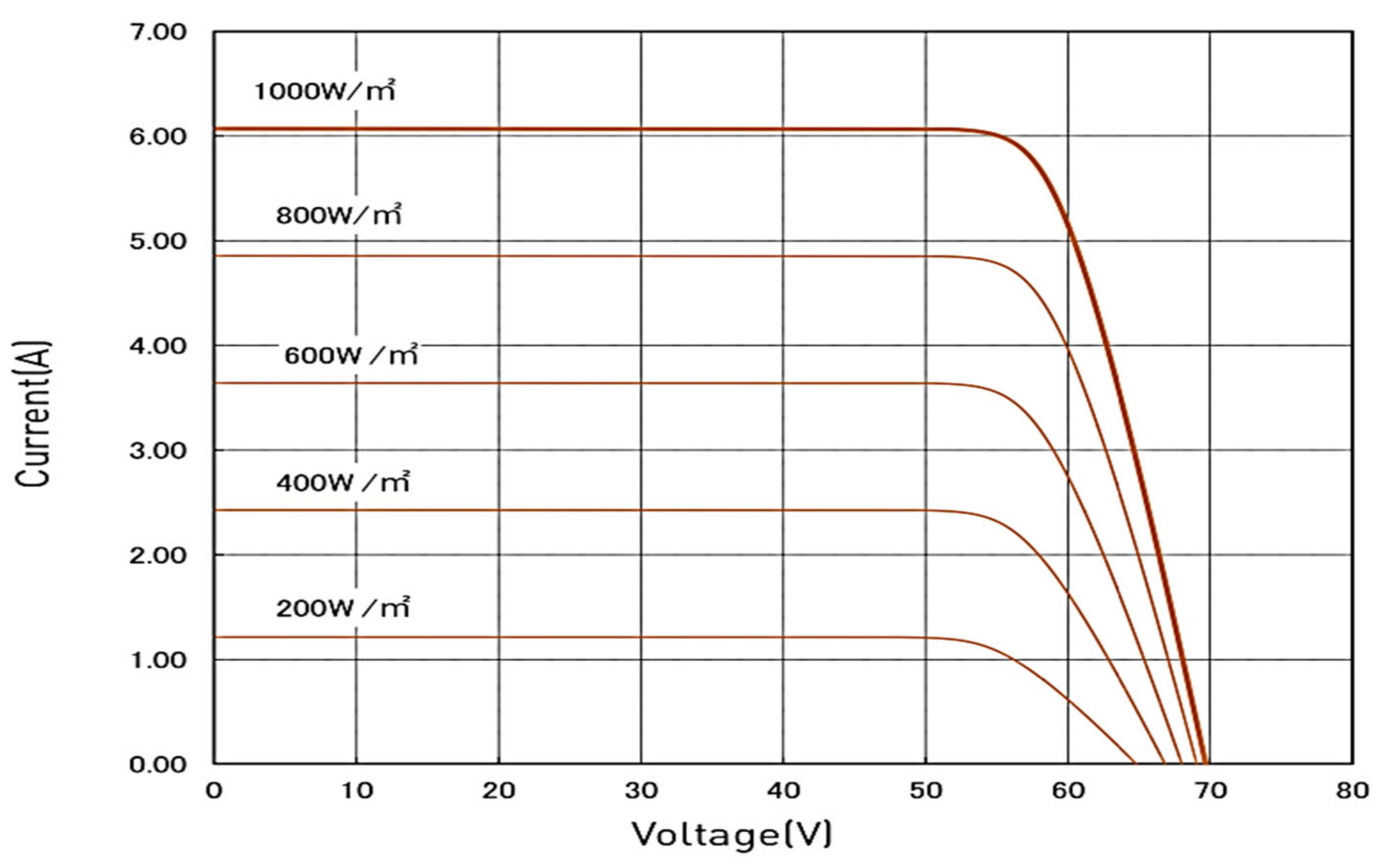
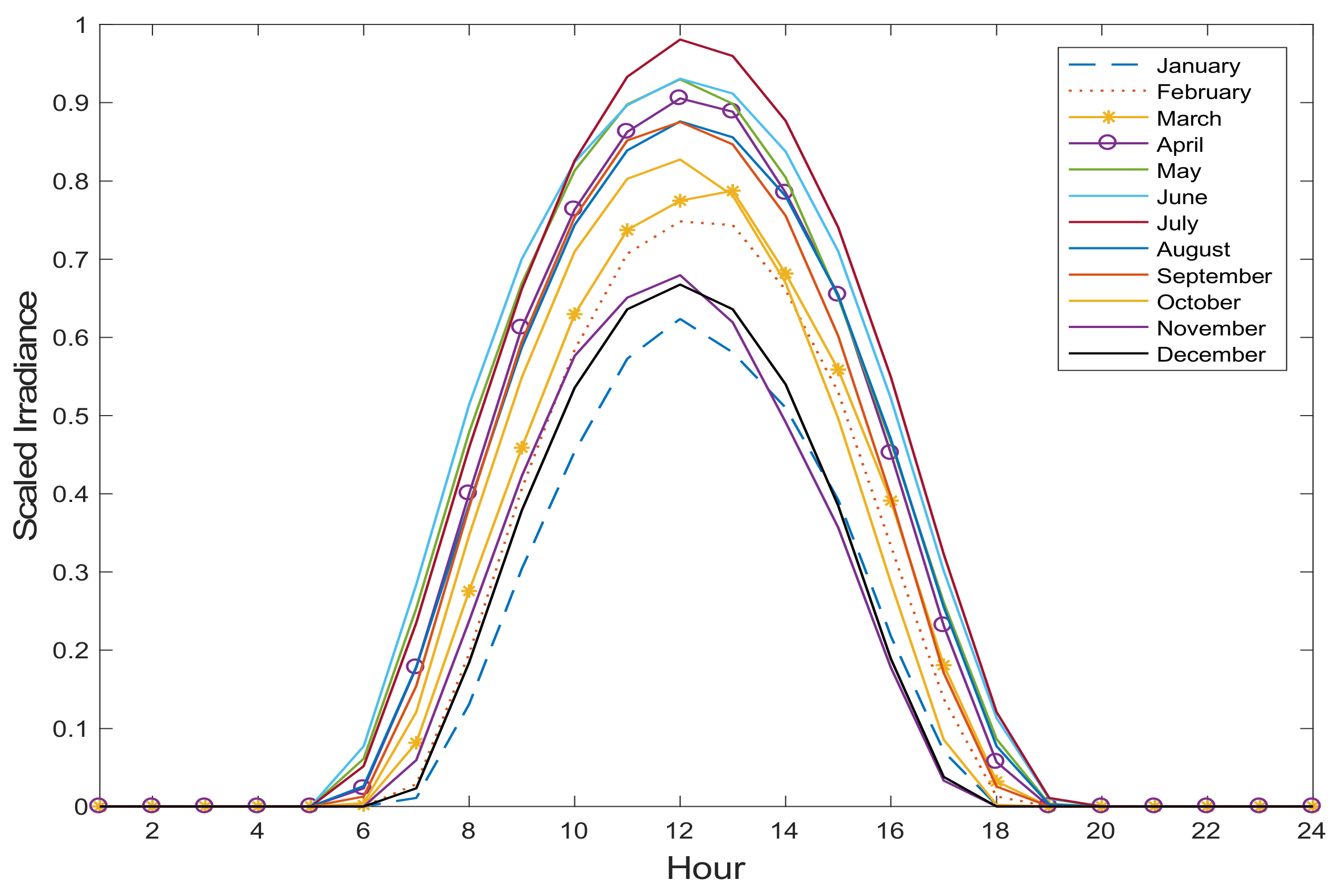
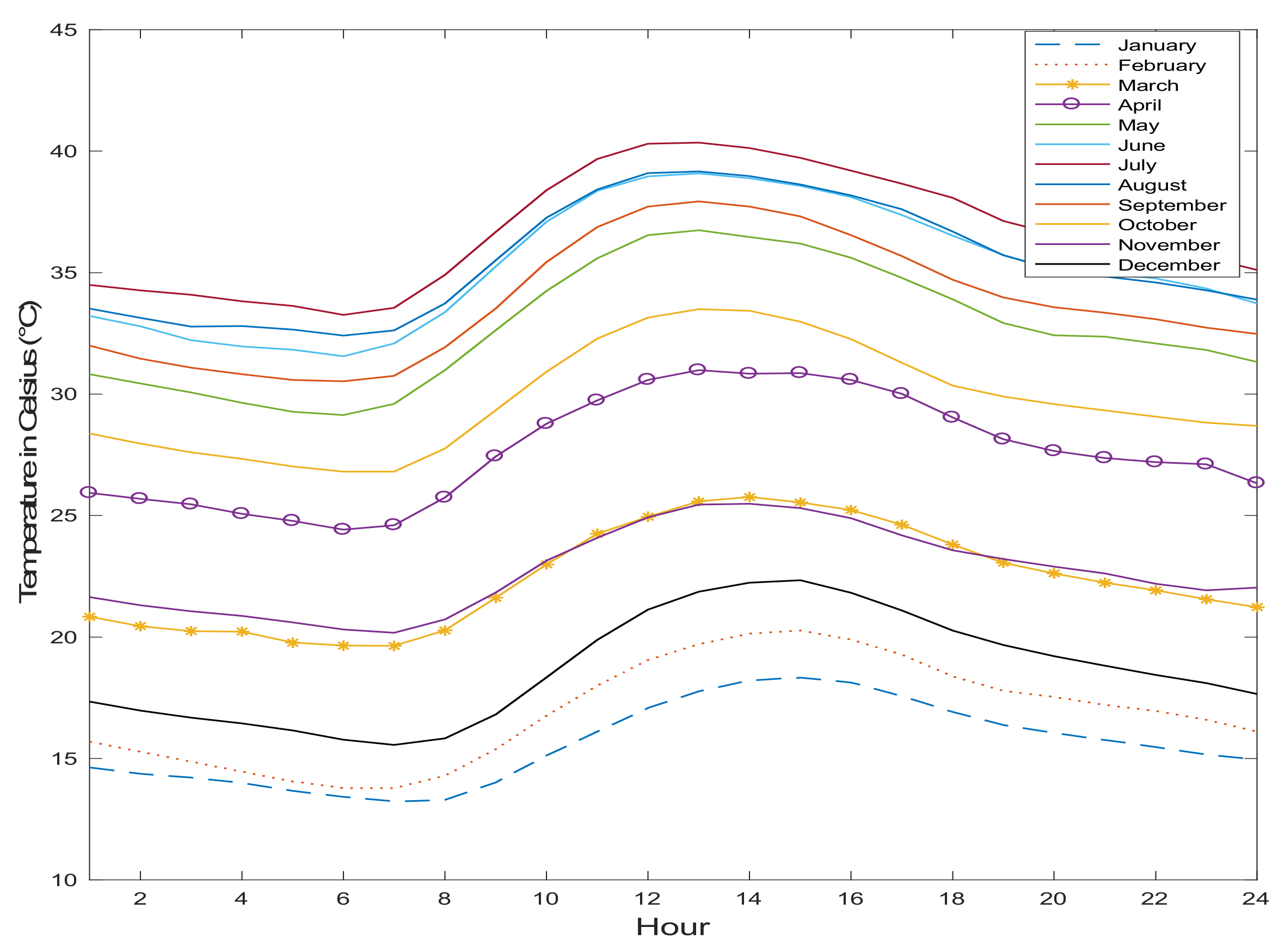
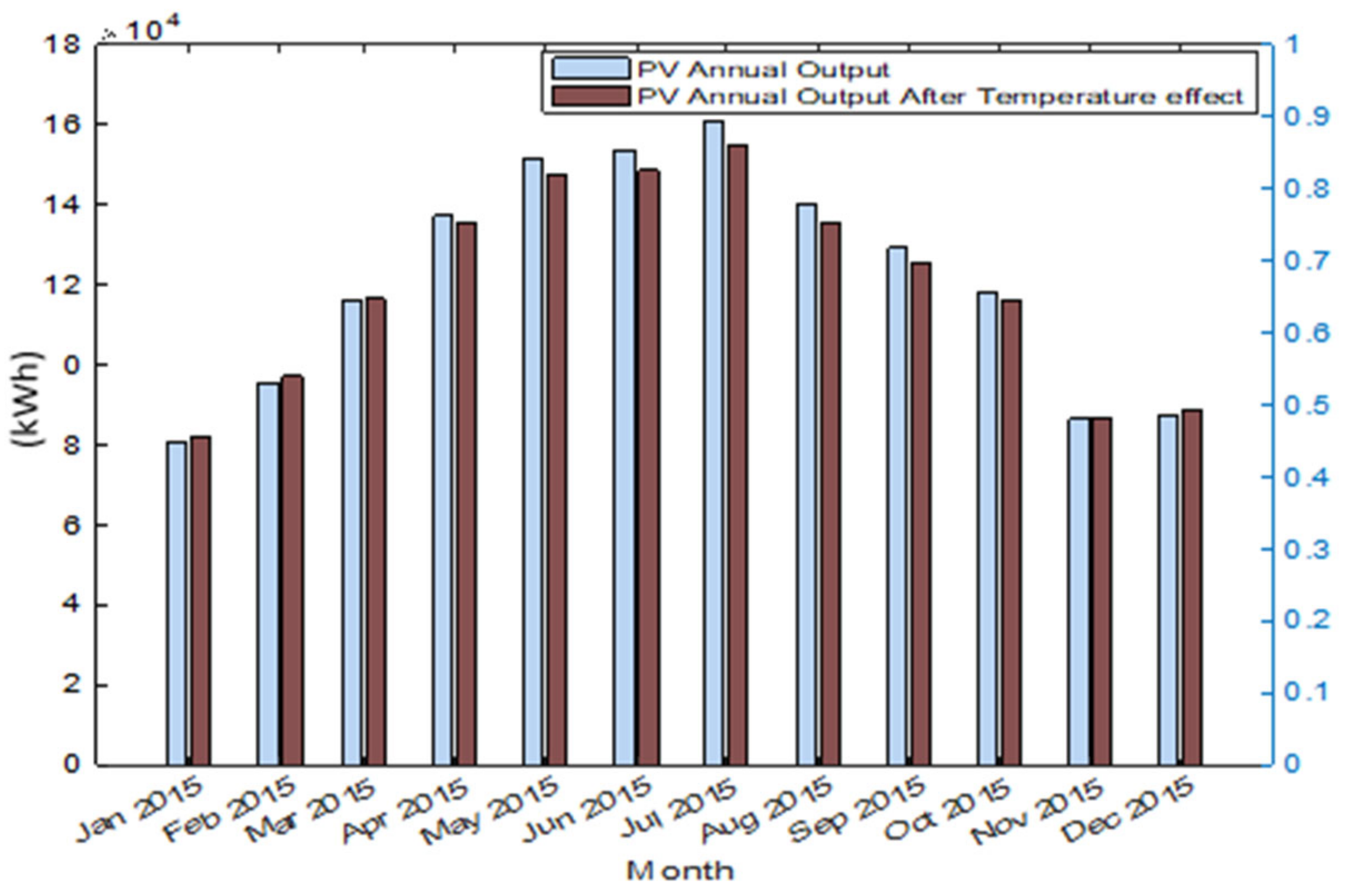
6.1. Solar PV Power Output
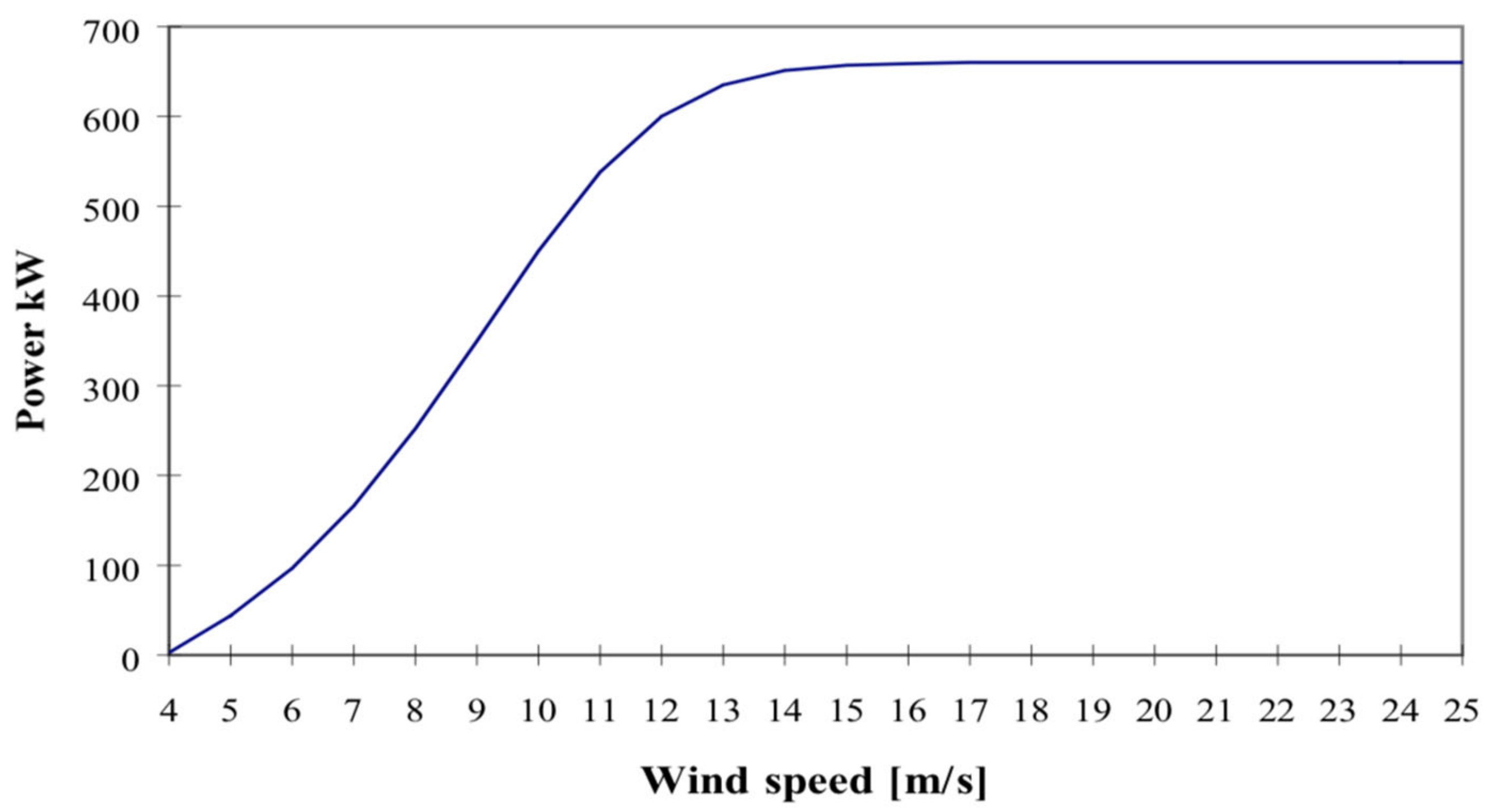
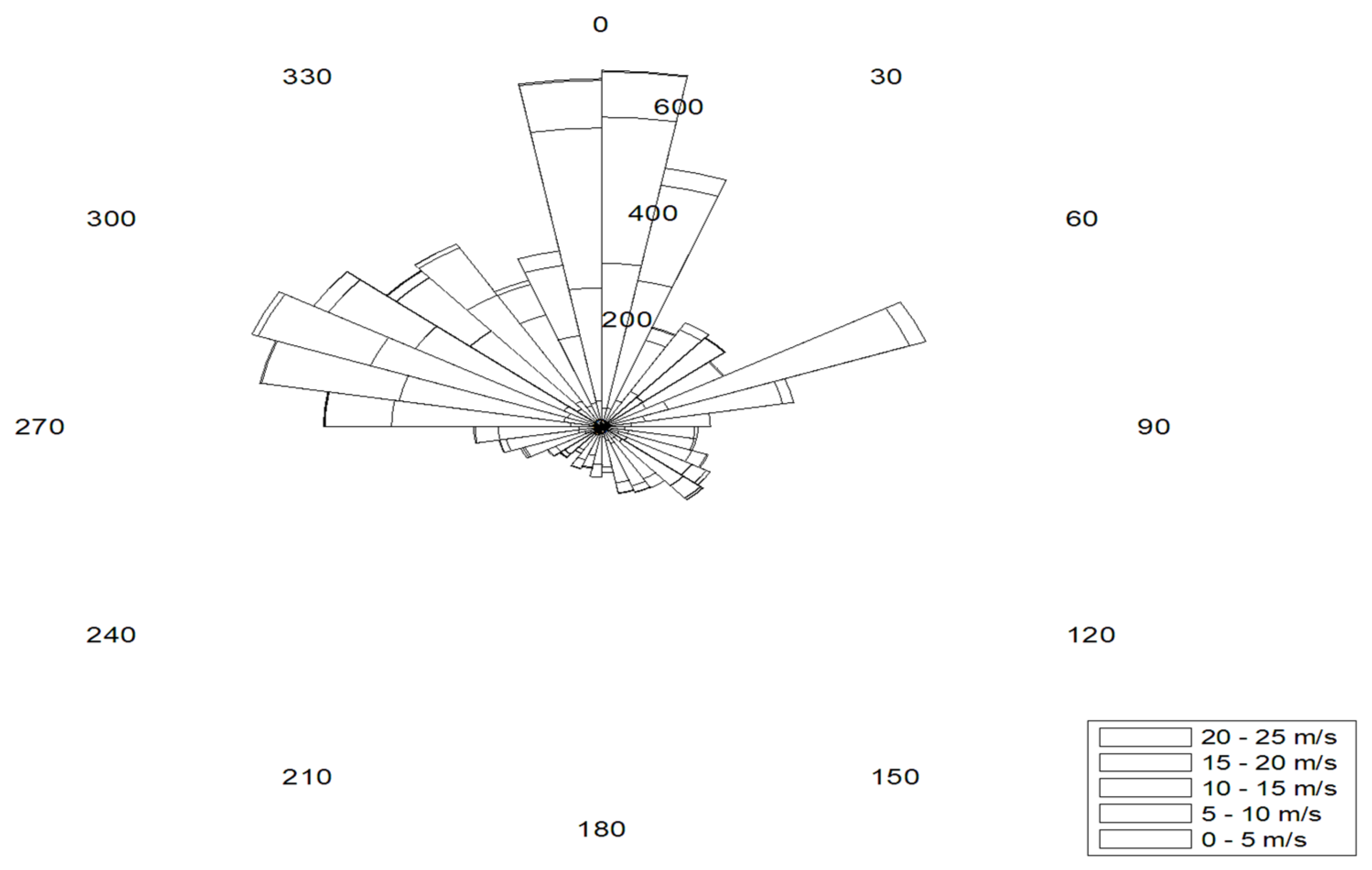
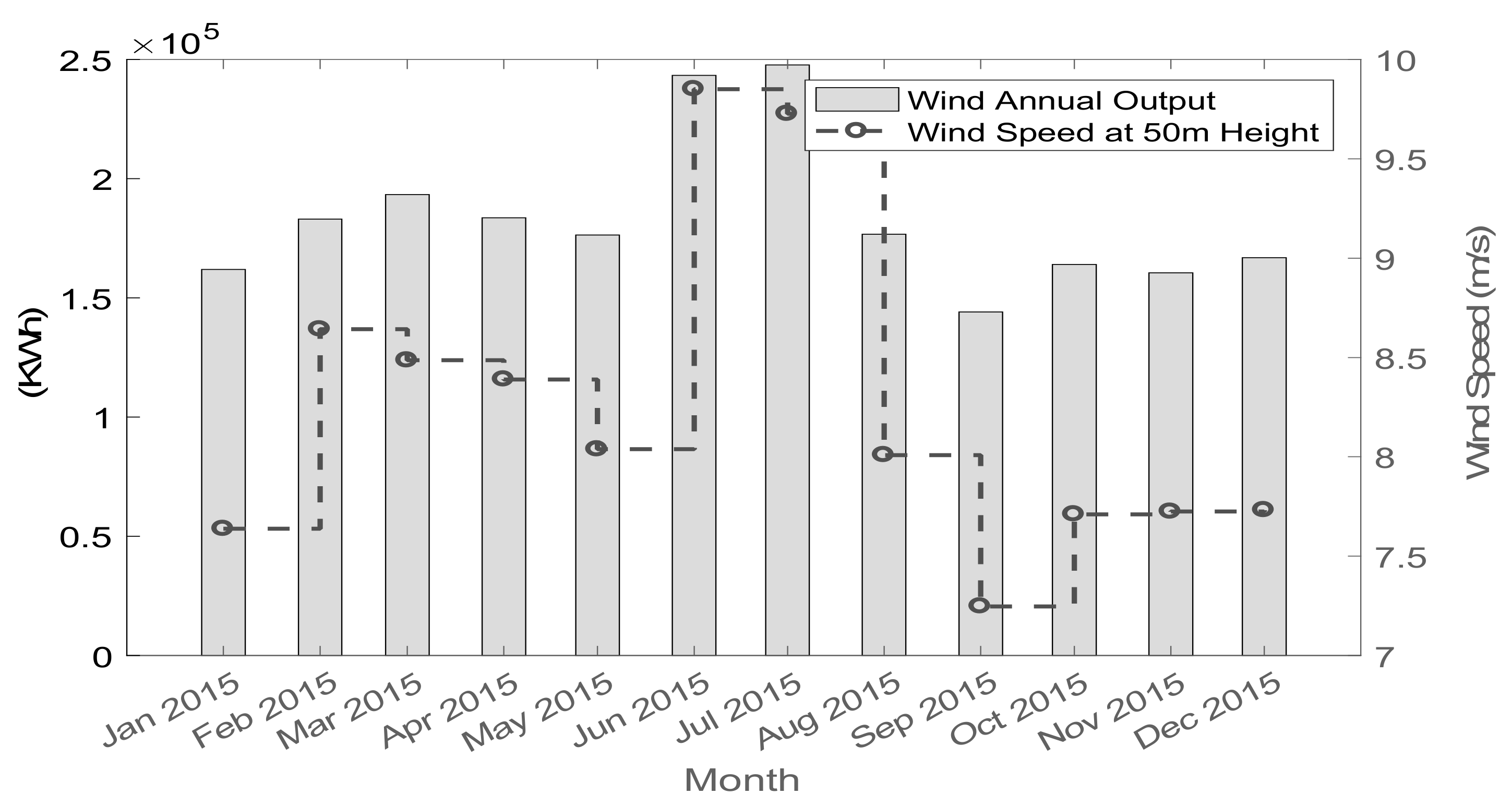
6.2. Wind DG Power Output
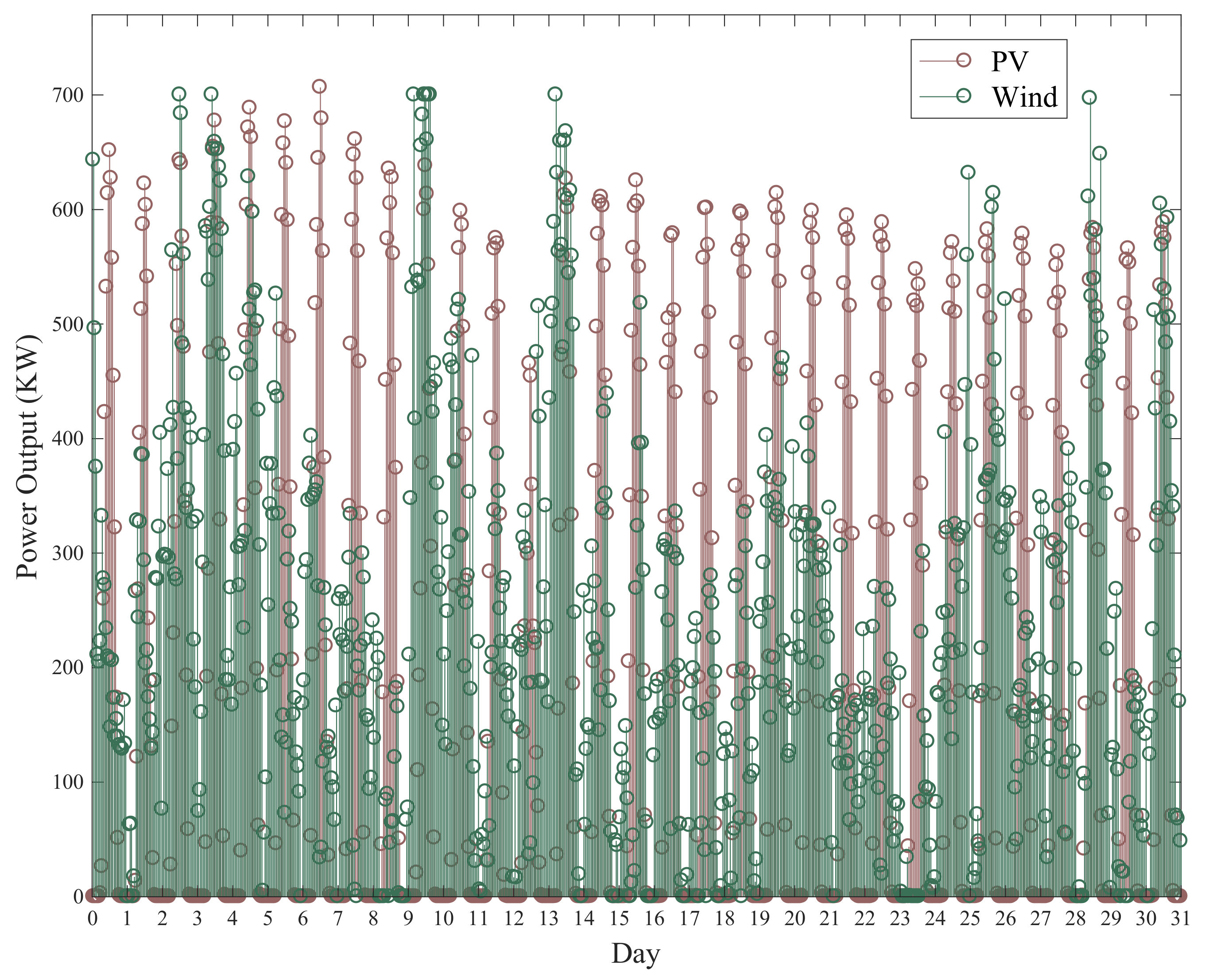
6.3. Combined Wind Turbine and Solar PV Power Output
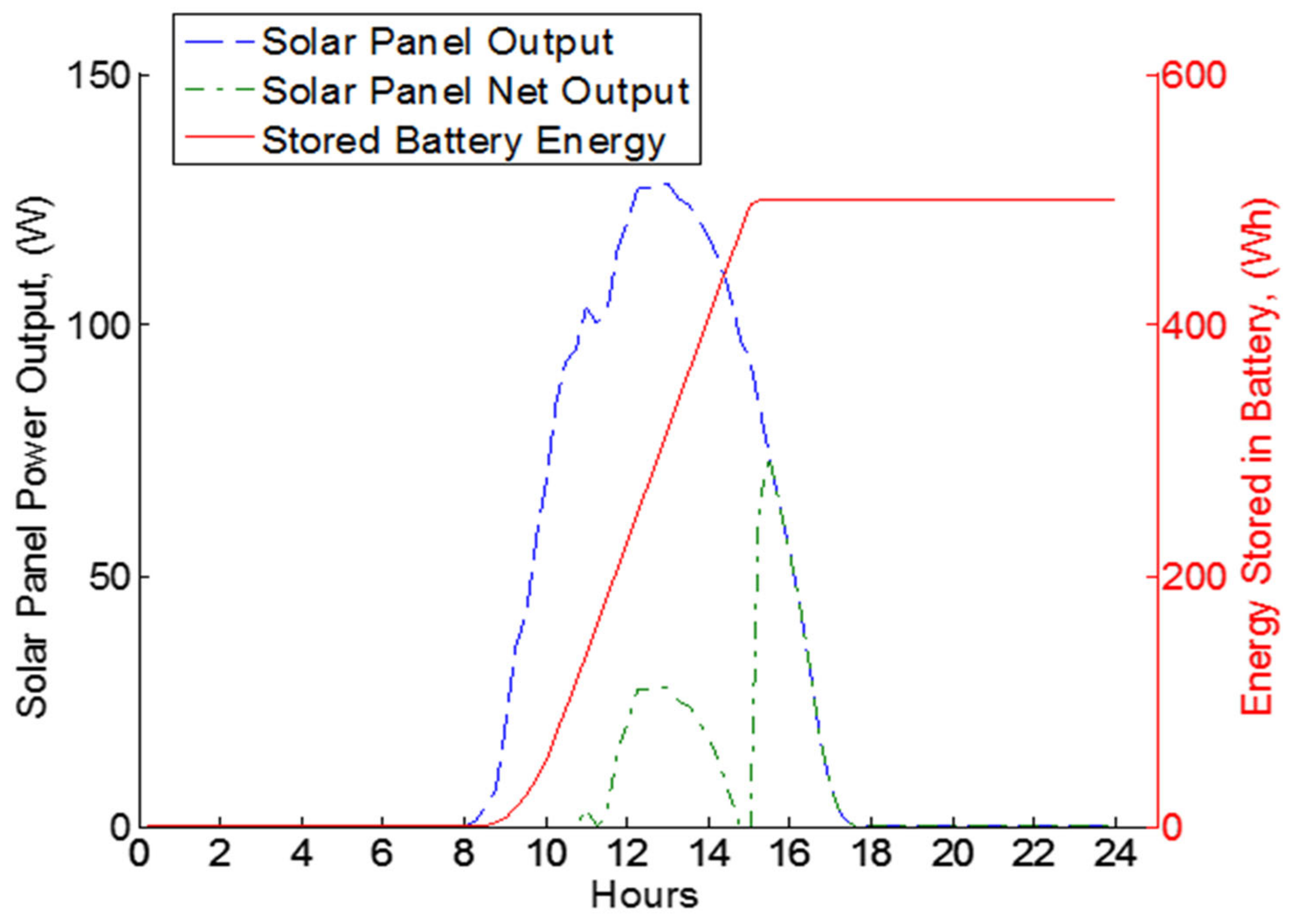
6.4. Combined Solar PV Power and Energy Storage Output
7. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Garg, V.; Sharma, S. Overview on Microgrid System. In Proceedings of the 2018 Fifth International Conference on Parallel, Distributed and Grid Computing (PDGC), Solan, India, 20–22 December 2018. [Google Scholar] [CrossRef]
- Barker, G.; Norton, P. Predicting Long-Term Performance of Photovoltaic Arrays Using Short-Term Test Data and an Annual Simulation Tool; NREL: Golden, CO, USA, 2003. [Google Scholar]
- De Soto, W.; Klein, S.; Beckman, W. Improvement and validation of a model for photovoltaic array performance. Sol. Energy 2006, 80, 78–88. [Google Scholar] [CrossRef]
- King, D.; Boyson, W.; Kratochvil, J. Photovoltaic Array Performance Model; Sandia Report No. SAND2004-3535; Sandia National Laboratory: Albuquerque, NM, USA, 2004. [Google Scholar]
- Arab, A.H.; Chenlo, F.; Benghanem, M. Loss-of-load probability of photovoltaic water pumping systems. Sol. Energy 2004, 76, 713–723. [Google Scholar] [CrossRef]
- Tian, H.; Mancilla-David, F.; Ellis, K.; Muljidi, E.; Jekins, P. A Detailed Performance Model for Photopholtaic Systems; NREL: Golden, CO, USA, 2012. [Google Scholar]
- Pandey, P.; Sandhu, K. Multi Diode Modelling of PV Cell. In Proceedings of the IEEE 6th India International Conference on Power Electronics (IICPE), Kurukshetra, India, 8–10 December 2014; pp. 1–4. [Google Scholar]
- Suthar, M.; Singh, G.; Saini, R. Comparison of Mathematical Models of Photo-Voltaic (PV) Module and Effect of Various Parameters on its Performance. In Proceedings of the International Conference on Energy Efficient Technologies for Sustainability (ICEETS), Nagercoil, India, 10–12 April 2013; pp. 1354–1359. [Google Scholar]
- Soon, J.J.; Low, K.-S. Optimizing Photovoltaic Model for Different Cell Technologies Using a Generalized Multidimension Diode Model. IEEE Trans. Ind. Electron. 2015, 62, 6371–6380. [Google Scholar] [CrossRef]
- Zhang, Q.; Liu, H.; Dai, C. Fireworks Explosion Optimization Algorithm for Parameter Identification of PV Model. In Proceedings of the EEE 8th International Power Electronics and Motion Control Conference (IPEMC-ECCE Asia), Hefei, China, 22–26 May 2016. [Google Scholar]
- Gong, L.; Zhao, W. An Improved PSO Algorithm for High Accurate Parameter Identification of PV Model. In Proceedings of the IEEE International Conference on Environment and Electrical Engineering and 2017 IEEE Industrial and Commercial Power Systems Europe (EEEIC / I&CPS Europe), Milan, Italy, 6–9 June 2017. [Google Scholar]
- Dali, A.; Bouharchouche, A.; Diaf, S. Parameter Identification of Photovoltaic Cell/Module Using Genetic Algorithm (GA) and Particle Swarm Optimization (PSO). In Proceedings of the 3rd International Conference on Control, Engineering & Information Technology (CEIT), Tlemcen, Algeria, 25–27 May 2015. [Google Scholar]
- Xu, Y.; Gao, Z.; Zhu, X. Parameter Identification of Simplified Engineering Model for PV Array Based on Shuffled Frog Leaping Algorithm. In Proceedings of the 20th International Conference on Electrical Machines and Systems (ICEMS), Sydney, Australia, 11–14 August 2017. [Google Scholar]
- Wasynczuk, O.; Man, D.; Sullivan, J. Dynamic behaviour of a class of wind turbine generators during random wind fluctations. IEEE Trans. Power Appar. Syst. 1981, PAS-100, 2837–2845. [Google Scholar] [CrossRef]
- Anderson, P.; Bose, A. Stability Simulation of Wind Turbine Systems. IEEE Trans. Power Appar. Syst. 1983, PAS-102, 3791–3795. [Google Scholar] [CrossRef]
- Kusiak, A. Renewables: Share Data on Wind Energy. Nature 2016, 529, 19–21. [Google Scholar] [CrossRef] [Green Version]
- Muyeen, S.; Tamura, J.; Murata, T. Stability Augmentation of a Grid-Connected Wind Farm; Springer-Verlag: London, UK, 2009. [Google Scholar]
- Slootweg, J. Wind Power: Modeling and Impact on Power System Dynamics. Ph.D. Thesis, Technische Universiteit Delft, Delft, The Netherlands, 2003. [Google Scholar]
- Manyonge, A.; Ochieng, R.; Onyango, F.; Shichikha, J. Mathematical modeling of wind turbine in a wind energy conversion system: Power coefficient analysis. Appl. Math. Sci. 2012, 6, 4527–4536. [Google Scholar]
- Ioan, B.; Horia, B.; Susana, O. Determination of The Power Generated by A Wind Turbine in Constant Wind and Variable Wind. In Proceedings of the 9th International Symposium on Advanced Topics in Electrical Engineering (ATEE), Bucharest, Romania, 7–9 May 2015. [Google Scholar]
- Alotaibi, M.; Almutairi, A.; Salama, M. Effect of Wind Turbine Parameters on Optimal DG Placement in Power Distribution Systems. In Proceedings of the 2016 IEEE Electrical Power and Energy Conference (EPEC), Ottawa, ON, Canada, 12–14 October 2016. [Google Scholar]
- Ramawat, D.; Prajapat, G.; Swarnkar, N. Reactive Power Loadability Based Optimal Placement of Wind and Solar DG in Distribution Network. In Proceedings of the IEEE 7th Power India International Conference (PIICON), Bikaner, India, 25–27 November 2016. [Google Scholar]
- Halicka, K.; Lombardi, P.; Styczynski, Z. Future-Oriented Analysis of Battery Technologies. In Proceedings of the IEEE International Conference on Industrial Technology (ICIT), Seville, Spain, 17–19 March 2015; pp. 1019–1024. [Google Scholar]
- Hussein, A.; Batarseh, I. An Overview of Generic Battery Models. In Proceedings of the IEEE Power and Energy Society General Meeting, Detroit, MI, USA, 24–28 July 2011; pp. 1–6. [Google Scholar]
- Kai, S.; Qifang, S. Overview of the Types of Battery Models. In Proceedings of the 30th Chinese Control Conference (CCC), Yantai, China, 22–24 July 2011; pp. 3644–3648. [Google Scholar]
- Sparacino, A.; Reed, G.; Kerestes, R.; Grainger, B.; Smith, Z. Survey of Battery Energy Storage Systems and Modeling Techniques. In Proceedings of the IEEE Power and Energy Society General Meeting, San Diego, CA, USA, 22–26 July 2012; pp. 1–8. [Google Scholar]
- Ceraolo, M. New dynamical models of lead-acid batteries. IEEE Trans. Power Syst. 2000, 15, 1184–1190. [Google Scholar] [CrossRef] [Green Version]
- Medora, N.; Kusko, A. An Enhanced Dynamic Battery Model of Lead-Acid Batteries Using Manufacturers Data. In Proceedings of the 28th Annual International Telecommunications Energy Conference, Providence, RI, USA, 10–14 September 2006; pp. 1–8. [Google Scholar]
- Duffie, J.; Beckman, W. Solar Engineering of Thermal Processes; Wiley: Hoboken, NJ, USA, 2013. [Google Scholar]
- Ishaque, K.; Salam, Z.; Taheri, H. Simple, fast and accurate two-diode model for photovoltaic modules. Sol. Energy Mater. Sol. Cells 2011, 95, 586–594. [Google Scholar] [CrossRef]
- Soon, J.; Low, K.; Goh, S. Multi-Dimension Diode Photovoltaic (PV) Model for Different PV Cell Technologies. In Proceedings of the 2014 IEEE 23rd International Symposium on Industrial Electronics (ISIE), Istanbul, Turkey, 1–4 June 2014. [Google Scholar]
- Singh, M.; Santoso, S. Dynamic Models for Wind Turbines and Wind Power Plants; NREL: Golden, CO, USA, 2011. [Google Scholar]
- Abu-Sharkh, S.; Doerffel, D. Rapid test and non-linear model characterisation of solid-state lithium-ion batteries. J. Power Sources 2004, 130, 266–274. [Google Scholar] [CrossRef]
- Martínez-Márquez, C.I.; Twizere-Bakunda, J.D.; Lundback-Mompó, D.; Orts-Grau, S.; Gimeno-Sales, F.J.; Seguí-Chilet, S. Small Wind Turbine Emulator Based on Lambda-Cp Curves Obtained under Real Operating Conditions. Energies 2019, 12, 2456. [Google Scholar] [CrossRef] [Green Version]
- Schweighofer, B.; Raab, K.; Brasseur, G. Modeling of high power automotive batteries by the use of an automated test system. IEEE Trans. Instrum. Meas. 2003, 52, 1087–1091. [Google Scholar] [CrossRef]
- Chen, S.X.; Gooi, H.B.; Wang, M.Q. Sizing of Energy Storage for Microgrids. IEEE Trans. Smart Grid 2012, 3, 142–151. [Google Scholar] [CrossRef]
- Price, W.W.; Casper, S.G.; Nwankpa, C.O.; Bradish, R.W.; Chiang, H.D.; Concordia, C.; Staron, J.V.; Taylor, C.W.; Vaahedi, E.; Wu, G. Bibliography on load models for power flow and dynamic performance simulation. IEEE Trans. Power Syst. 1995, 10, 523–538. [Google Scholar]
- Maitra, A.; Gaikwad, A.; Zhang, A.; Ingram, M.; Mercado, D.; Woitt, W. Using System Disturbance Measurement Data to Develop Improved Load Models. In Proceedings of the IEEE PES Power Systems Conference and Exposition, Atlanta, GA, USA, 29 October–1 November 2006. [Google Scholar]
- Korunovic, L.; Sterpu, S.; Djokic, S.; Yamashita, K.; Villanueva, S.; Milanovic, J.V. Processing of Load Parameters Based on Existing Load Models. In Proceedings of the 3rd IEEE PES Innovative Smart Grid Technologies (ISGT), Berlin, Germany, 14–17 October 2012. [Google Scholar]
- Kundur, P. Power System Stability and Control; McGraw Hill: New York, NY, USA, 1994. [Google Scholar]
- Price, W.; Wirgau, K.; Murdoch, A.; Mitsche, J.; Vaahedi, E.; El-Kady, M. Load modeling for power flow and transient stability computer studies. IEEE Trans. Power Syst. 1988, 3, 180–187. [Google Scholar] [CrossRef]
- Concordia, C.; Ihara, S. Load representation in power systems stability studies. IEEE Trans. 1982, PAS-101, 969–977. [Google Scholar]
- Price, W.; Chiang, H.; Clark, H.; Concordia, C.; Lee, D.; Hsu, J.; Ihara, S.; King, C.; Lin, C.; Mansour, Y.; et al. Load representation for dynamic performance analysis (of Power Systems). IEEE Trans. Power Syst. 1993, 8, 472–482. [Google Scholar]
- Bostanci, M.; Koplowitz, J.; Taylor, C. Identification of power system load dynamics using artificial neural networks. IEEE Trans. Power Syst. 1997, 12, 1468–1473. [Google Scholar] [CrossRef]
- Arif, A.; Wang, Z.; Mather, B.; Bashulado, H.; Zhao, D. Load modeling a review. IEEE Trans. Smart Grid 2017, 9, 11. [Google Scholar] [CrossRef]
- Lim, J.; Ozdemir, A.; Singh, C. Component-based load modeling including capacitor banks. In Proceedings of the Power Engineering Society Summer Meeting, Vancouver, BC, Canada, 15–19 July 2001. [Google Scholar]
- Wong, K.; Haque, M.; Davies, M. Component-Based Dynamic Load Modeling of a Paper Mill. In Proceedings of the 22nd Australasian Universities Power Engineering Conference (AUPEC), Bali, Indonesia, 26–29 September 2012; pp. 1–6. [Google Scholar]
- Dzafic, I.; Glavic, M.; Tesnjak, S. A component-based power system model-driven architecture. IEEE Trans. Power Syst. 2004, 19, 2109–2110. [Google Scholar] [CrossRef]
- Kosterev, D.; Mekilin, A.; Undrill, J.; Lesieutre, B.; Price, W.; Chassin, D.; Bravo, R.; Yang, S. Load Modeling in Power System Studies: WECC Progress Update. In Proceedings of the 2008 IEEE Power and Energy Society General Meeting—Conversion and Delivery of Electrical Energy in the 21st Century 2008, Pittsburgh, PA, USA, 20–24 July 2008. [Google Scholar]
- Gaikwad, A.; Markham, P.; Pourbeik, P. Implementation of The WECC Composite Load Model for Utilities Using the Component-Based Modeling Approach. In Proceedings of the IEEE/PES Transmission and Distribution Conference, Dallas, TX, USA, 3–5 May 2016. [Google Scholar]
- Zhu, L.; Li, X.; Ouyang, H.; Wang, Y.; Liu, W.; Shao, K. Research on Component-Based Approach Load Modeling Based on Energy Management System and Load Control System. In Proceedings of the EEE PES Innovative Smart Grid Technologies, Tianjin, China, 21–24 May 2012. [Google Scholar]
- EPRI. Advanced Load Modeling; Electrical Power Research Institute (EPRI): Palo Alto, CA, USA, 2002. [Google Scholar]
- Porsinger, T.; Janik, P.; Leonowicz, Z.; Gono, R. Component Modeling for Microgrids. In Proceedings of the IEEE 16th International Conference on Environment and Electrical Engineering (EEEIC), Florence, Italy, 7–10 June 2016. [Google Scholar]
- Papadopolus, T.; Tzanidakis, E.; Papadopoulos, P.; Crolla, P.; Papagiannis, G.; Burt, G. Aggregate load modeling in microgrids using online measurements. In Proceedings of the MedPower, Athens, Greece, 2–5 November 2014. [Google Scholar]
- Choi, B.; Chiang, H.; Li, Y.; Li, H.; Chen, Y.; Huang, D.; Lauby, M. Measurement-based dynamic load models: Derivation, comparison, and validation. IEEE Trans. Power Syst. 2006, 21, 1276–1283. [Google Scholar] [CrossRef]
- Hou, J.; Xu, Z.; Dong, Z. Measurement-Based Load Modeling at Distribution Level with Complete Model Structure. In Proceedings of the IEEE Power and Energy Society General Meeting, San Diego, CA, USA, 22–26 July 2012. [Google Scholar]
- Stojanović, D.P.; Korunović, L.M.; Milanović, J. Dynamic load modelling based on measurements in medium voltage distribution network. Electr. Power Syst. Res. 2008, 78, 228–238. [Google Scholar] [CrossRef]
- Kontis, E.O.; Papadopoulos, T.A.; Chrysochos, A.I.; Papagiannis, G.K. Measurement-Based Dynamic Load Modeling Using the Vector Fitting Technique. IEEE Trans. Power Syst. 2018, 33, 338–351. [Google Scholar] [CrossRef]
- Tasdighi, M.; Ghasemi, H.; Rahimi-Kian, A. Residential Microgrid Scheduling Based on Smart Meters Data and Temperature Dependent Thermal Load Modeling. IEEE Trans. Smart Grid 2014, 5, 349–357. [Google Scholar] [CrossRef]
- Li, H.; Yao, C.; Wang, J.; Zhu, L.; Yang, S. Events Identification Based Load Modeling for Residential Microgrid. In Proceedings of the 2015 IEEE Energy Conversion Congress and Exposition (ECCE), Montreal, QC, Canada, 20–24 September 2015. [Google Scholar]
- Milanovic, J.V.; Zali, S.M. Validation of Equivalent Dynamic Model of Active Distribution Network Cell. IEEE Trans. Power Syst. 2013, 28, 2101–2110. [Google Scholar] [CrossRef]
- Chakrabarti, V.; Srivastava, S. Classification and Modelling of Loads in Power Systems Using Svm and Optimization Approach. In Proceedings of the 2015 IEEE Power Energy Society General Meeting, Denver, CO, USA, 26–30 July 2015. [Google Scholar]
- Panasonic Photovoltaic Module HIT. 2015. Available online: https://ftp.panasonic.com/solar/specsheet/n325330-spec-sheet.pdf (accessed on 5 March 2023).
- University of Oregon Solar Radiation Monitoring Laboratory. Available online: http://solardat.uoregon.edu/SelectMonthlyAverage.html (accessed on 25 January 2023).
- Vestas Wind Systems A/S. Vestas V47-660 kW with OptiTip and OptiSlip. 2000. Available online: https://sti2d.ecolelamache.org/ressources/EE/premiere/TP/serie%202/Vestas_V47.pdf (accessed on 5 March 2023).













{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Specification Parameters | Data Value |
|---|---|
| Cells per module | 96 |
| Module watts (STC) | 330 W |
| Area Swept | 3904 m2 |
| Max power voltage | 58 V |
| Max power current | 5.7 A |
| 69.7 V, 6.07 A | |
| Module efficiency | 19.7% |
| Temperature coefficient | −0.2580% for every 1 °C |
| Specification Parameters | Data Value |
|---|---|
| Rated Power | 660 KW |
| Hub height | 50 m |
| Generator type | Induction |
| Survival wind speed | 59.5 m/s |
| Rated Wind Speed | 15 m/s |
| Cut-in Wind Speed | 4.0 m/s |
| Cut-out Wind Speed | 25.0 m/s |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
AlMuhaini, M.; Yahaya, A.; AlAhmed, A. Distributed Generation and Load Modeling in Microgrids. Sustainability 2023, 15, 4831. https://doi.org/10.3390/su15064831
AlMuhaini M, Yahaya A, AlAhmed A. Distributed Generation and Load Modeling in Microgrids. Sustainability. 2023; 15(6):4831. https://doi.org/10.3390/su15064831
Chicago/Turabian StyleAlMuhaini, Mohammad, Abass Yahaya, and Ahmed AlAhmed. 2023. "Distributed Generation and Load Modeling in Microgrids" Sustainability 15, no. 6: 4831. https://doi.org/10.3390/su15064831