

Evaluation of Real-Time Perception of Deformation State of Host Rocks in Coal Mine Roadways in Dusty Environment
 ,
,
Abstract
:1. Introduction
2. Principle of Roadway Deformation Measurement
3. ROI Segmentation and Center Point Coordinate Calculation of Roadway Monitoring Target Image
3.1. Binocular Image Preprocessing
3.2. ROI Segmentation Method Based on K-Medoids Algorithm
- A Gaussian filter was used to smooth the binocular image to reduce the impact of noise on image segmentation;
- The improved K-medoids algorithm was used to extract ROI from left and right images, and the image was divided into target and background images;
- We detected the connected region of the segmented image to remove the connected domain and noise points with the small area;
- We restored the original pixel of the target image.
3.3. Target Image Edge Detection and Center-Point Coordinate Calculation
4. Binocular Stereo Vision Measurement Algorithm
4.1. Three-Dimensional Coordinate Calculation Principle of the Roadway Monitoring Target
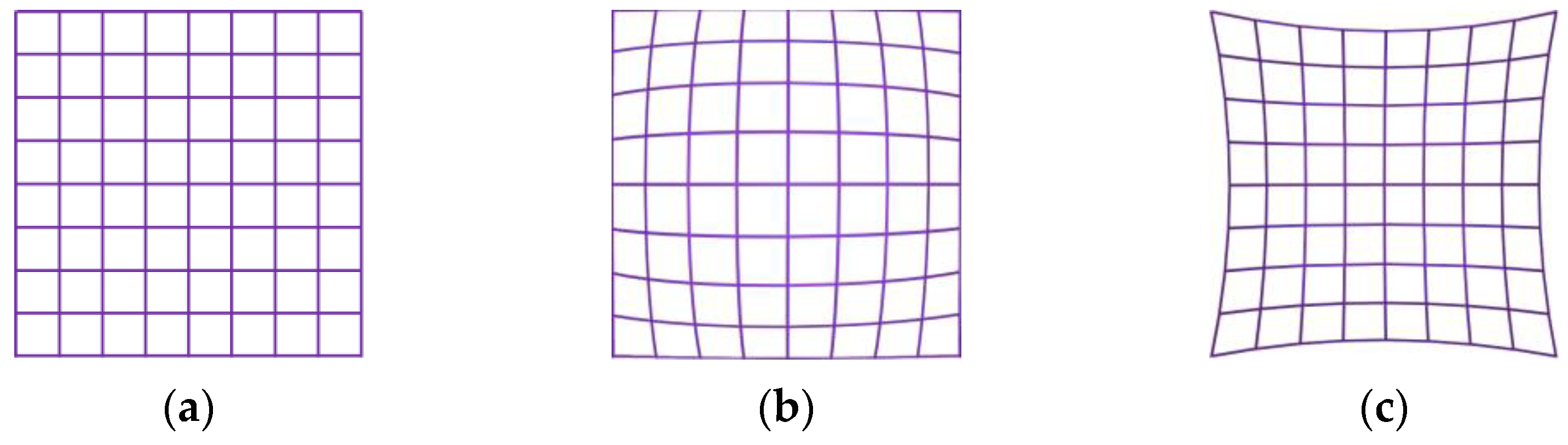
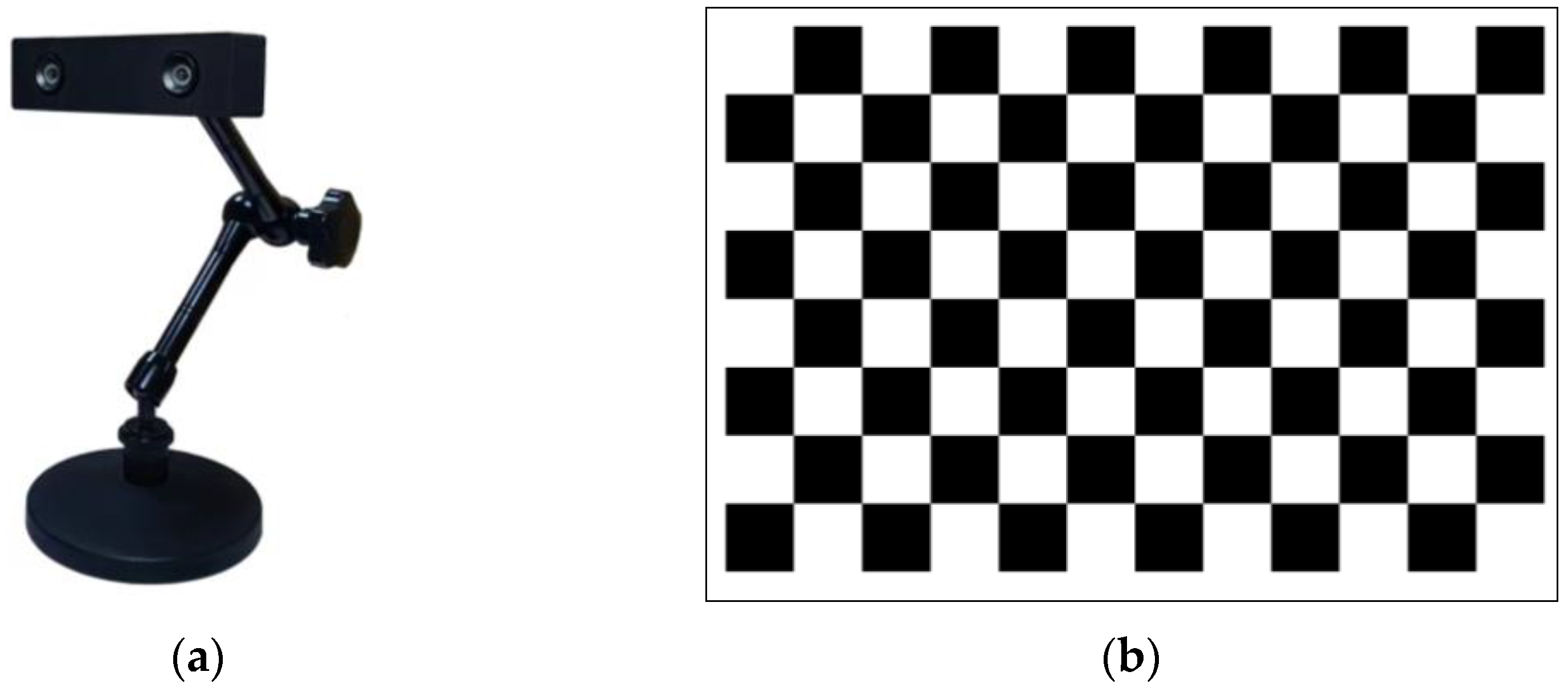
4.2. Camera Calibration Principle
4.3. Binocular Stereo Rectification
4.4. Stereo Matching
4.4.1. SIFT Algorithm
- Scale space extremum detection;
- Feature point localization;
- Determine the direction of each feature point;
- Feature point descriptor generation.
4.4.2. SGBM Algorithm
5. Experimental Results and Analysis
5.1. Binocular Camera Calibration Experiment
5.2. ROI Segmentation and Location Results
5.3. SIFT Feature Point Extraction and Matching Results Analysis
5.4. Measurement Results and Analysis of Roadway Deformation
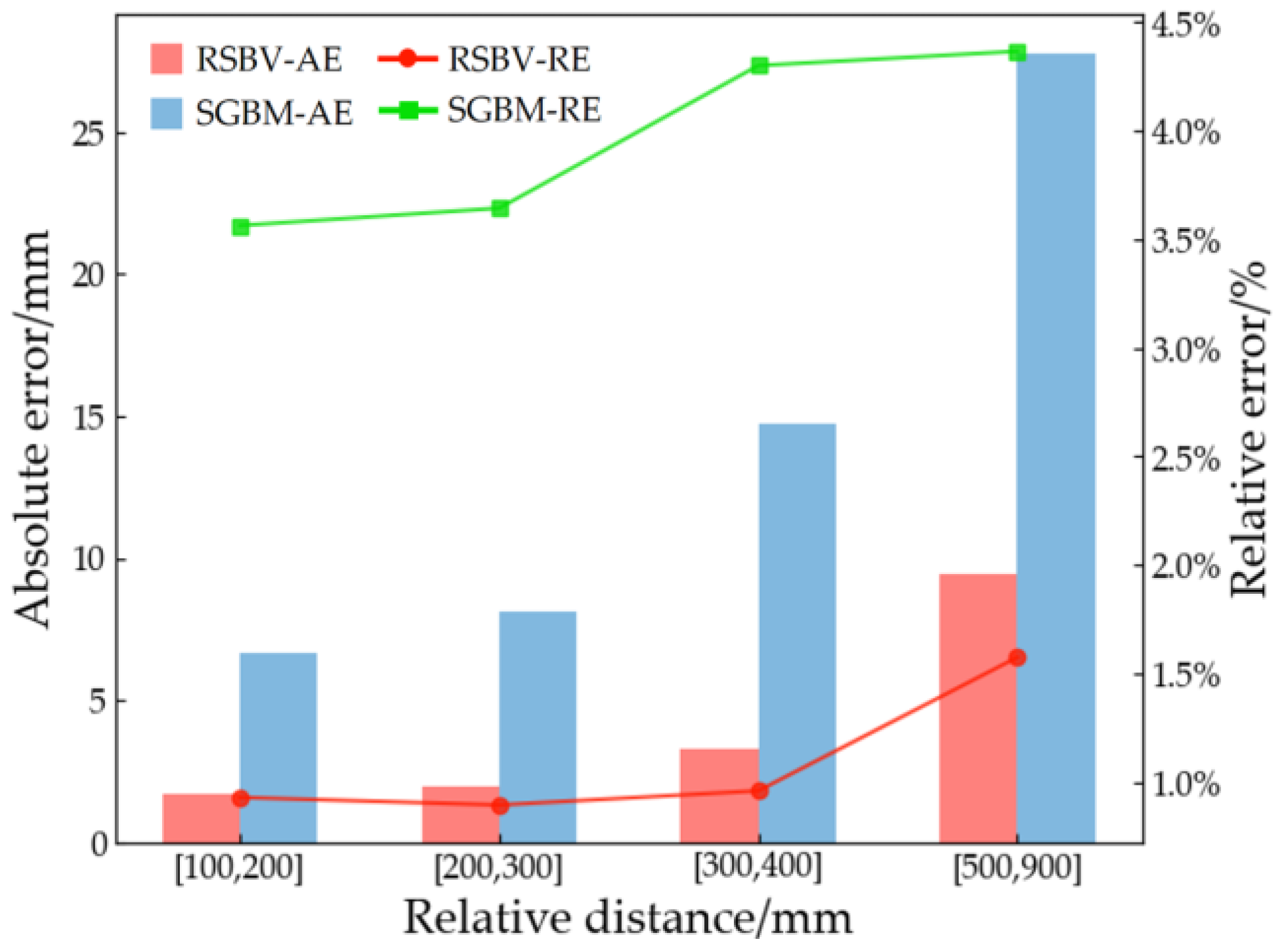
5.5. Error Analysis
6. Conclusions and Discussion
- From the aspect of experimental design, the accuracy of depth measurement was limited because the binocular camera used in the experiment was a fixed baseline. The resolution of the camera was low, which made it challenging to meet the accurate recognition of the target image at a distance, so the experiment was only carried out at a distance of 3 m from the roadway.
- Because the quality of the image collected in the experiment was greatly affected by the light, it was necessary to provide a stable auxiliary light source for collecting and monitoring the target image.
- Due to the slow deformation of surrounding rock in the actual roadway environment and the high requirements for the safety of underground electronic equipment, this experiment has only been verified under laboratory conditions, not tested in the actual environment.
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Wang, G.F.; Liu, F.; Pang, Y.H.; Ren, H.W.; Ma, Y. Coal mine intellectualization: The core technology of high quality development. J. China Coal Soc. 2019, 44, 349–357. [Google Scholar] [CrossRef]
- Chen, J.; Liu, L.; Zeng, B.; Tao, K.; Zhang, C.; Zhao, H.; Zhang, J. A constitutive model to reveal the anchorage mechanism of fully bonded bolts. Rock Mech. Rock Eng. J. China Coal Soc. 2022, 56, 1–19. [Google Scholar] [CrossRef]
- Chen, J.; Tao, K.; Zeng, B.; Liu, L.; Zhao, H.; Zhang, J.; Li, D. Experimental and Numerical Investigation of the Tensile Performance and Failure Process of a Modified Portland Cement. Int. J. Concr. Struct. Mater. 2022, 16, 61. [Google Scholar] [CrossRef]
- Shan, P.F.; Zhang, S.; Lai, X.P.; Yang, Y.B.; Bai, R.; Liu, B.W. Analysis of cooperative early warning and regulation mechanism of “dual energy” indicators under different pressure relief measures. Chin. J. Rock Mech. Eng. 2021, 40, 3261–3273. [Google Scholar]
- Shan, P.F.; Cui, F.; Cao, J.T.; Lai, X.P.; Sun, H.; Yang, Y.R. Testing on fluid-solid coupling characteristics of fractured coal-rock mass considering regional geostress characteristics. J. China Coal Soc. 2018, 43, 105–117. [Google Scholar]
- Xu., H.C.; Lai, X.P.; Shan, P.F.; Yang, Y.; Zhang, S.; Yan, B.; Zhang, N. Energy dissimilation characteristics and shock mechanism of coal-rock mass induced in steeply-inclined mining: Comparison based on physical simulation and numerical calculation. Acta Geotech. 2022, 1–22. [Google Scholar] [CrossRef]
- Lu, R.; Ma, F.; Guo, J.; Zhao, H. Analysis and monitoring of roadway deformation mechanisms in nickel mine, China. Concurr. Comput. Pract. Exp. 2019, 31, e4832. [Google Scholar] [CrossRef]
- Daraei, A.; Zare, S. Modified criterion for prediction of tunnel deformation in non-squeezing ground conditions. J. Mod. Transp. 2019, 27, 11–24. [Google Scholar] [CrossRef]
- Malkowski, P.; Niedbalski, Z.; Majcherczyk, T.; Bednarek, L. Underground monitoring as the best way of roadways support design validation in a long time period. Min. Miner. Depos. 2020, 14, 1–14. [Google Scholar] [CrossRef]
- Tang, B.; Cheng, H. Application of distributed optical fiber sensing technology in surrounding rock deformation control of TBM-excavated coal mine roadway. J. Sens. 2018, 2018, 8010746. [Google Scholar] [CrossRef]
- Lu, Q.S.; Gao, Q. Monitoring research on convergence deformation of laneway way rock and obsturator in no. 2 digging of Jinchuan. Chin. J. Rock Mech. Eng. 2003, S2, 2633–2638. [Google Scholar]
- Ding, E.J.; Liu, X.R.; Huang, Y.Q.; Zhang, Y.; Wang, M.Y. Design on Monitoring and Measuring Nodes of Mine Roadway Separation and Deformation Based on Wifi. Coal Sci. Technol. 2011, 39, 75–79. [Google Scholar]
- Hou, G.Y.; Hu, Z.Y.; Li, Z.X.; Zhao, Q.R.; Feng, D.X.; Cheng, C.; Zhou, H. Present situation and Prospect of coal mine safety monitoring based on Fiber Bragg grating and distributed optical fiber sensing technology. J. China Coal Soc. 2022. [Google Scholar] [CrossRef]
- Yang, J.Z.; Jiang, L.F.; Li, M.; Guan, B.H.; Jiang, Z.; Yuan, Z.M. Research on extraction technology of coal wall and roof boundary based on laser point cloud. Coal Sci. Technol. 2021, 49, 40–45. [Google Scholar]
- Wang, Y.S.; Li, Y.H.; Xu, S. Development of Three-Dimensional Dynamic Visualization System for Laneway Convergence Monitoring. J. Northeast. Univ. (Nat. Sci.) 2017, 38, 116–120. [Google Scholar]
- Kajzar, V.; Kukutsch, R.; Heroldova, N. Verifying the possibilities of using a 3D laser scanner in the mining underground. Acta Geodyn. Geomater 2015, 12, 51–58. [Google Scholar] [CrossRef] [Green Version]
- Kajzar, V.; Kukutsch, R.; Waclawik, P.; Nemcik, J. Innovative approach to monitoring coal pillar deformation and roof movement using 3D laser technology. In Proceedings of the ISRM European Rock Mechanics Symposium-EUROCK 2017, Ostrava, Czech Republic, 20–22 June 2017. [Google Scholar]
- Dong, L.H.; Song, W.S.; Fu, L.M. Dynamic coal quantity measurement method based on binocular vision. Chin. J. Rock Mech. Eng. 2022, 50, 196–203. [Google Scholar]
- Yang, C.Y.; Gu, Z.; Zhang, X.; Zhou, L.N. Bin ocular vision measurement of coal flow of belt conveyorsbased on deep learning. Chin. J. Sci. Instrum. 2021, 41, 164–174. [Google Scholar]
- Hasebe, K.; Wada, Y.; Nakamura, K. Non-contact bolt axial force measurement based on the deformation of bolt head using quartz crystal resonator and coils. Jpn. J. Appl. Phys. 2022, 61, SG1022. [Google Scholar] [CrossRef]
- Zhang, X.H.; Shen, Q.F.; Yang, W.J.; Zhang, C.; Mao, Q.H.; Wang, H.; Huang, M.Y. Research on visual positioning technology of roadheader body based on three laser point target. J. Electron. Meas. Instrum. 2022, 36, 178–186. [Google Scholar]
- Xu, J.; Wang, E.; Zhou, R. Real-time measuring and warning of surrounding rock dynamic deformation and failure in deep roadway based on machine vision method. Measurement 2020, 149, 107028. [Google Scholar] [CrossRef]
- Meng, Q.B.; Han, L.J.; Qiao, W.G.; Lin, D.G.; Wen, S.Y.; Zhang, J. Deformation failure characteristics and mechanism analysis of muddy weakly cemented soft rock roadway. J. Min. Saf. Eng. 2016, 33, 1014–1022. [Google Scholar]
- Ivan, S.; Iaroslav, L.; Svitlana, S.; Oleksandr, I. Method for controlling the floor heave in mine roadways of underground coal mines. Min. Miner. Depos. 2022, 16, 1–10. [Google Scholar] [CrossRef]
- Xuan, D.; Yi, P.; Wen, J.T. Fast efficient algorithm for enhancement of low lighting video. In Proceedings of the ACM SIGGRAPH 2010 Posters, Los Angeles, CA, USA, 26–30 July 2010; p. 1. [Google Scholar]
- Yang, Y.R.; Li, G.; Luo, T.; AI-Bahrani, M.; AI-Ammar, E.A.; Sillanpaa, M.; Leng, X.J. The innovative optimization techniques for forecasting the energy consumption of buildings using the shuffled frog leaping algorithm and different neural networks. Energy 2022, 268, 126548. [Google Scholar] [CrossRef]
- Tan, S.Y.; Akbar, M.F.; Shrifan, N.H.; Nihad Jawad, G.; Ab Wahab, M.N. Assessment of Defects under Insulation Using K-Medoids Clustering Algorithm-Based Microwave Nondestructive Testing. Coatings 2022, 12, 1440. [Google Scholar] [CrossRef]
- Yan, H.; Zhao, Q.F.; Xie, M. Edge Detection and Repair of PCBA Components Based on Adaptive Canny Operator. Acta Opt. Sin. 2021, 41, 97–104. [Google Scholar]
- Fitzgibbon, A.W.; Pilu, M.; Fisher, R.B. Direct least squares fitting of ellipses. In Proceedings of the 13th International Conference on Pattern Recognition, Vienna, Austria, 25–29 August 1996. [Google Scholar]
- Goutcher, R.; Barrington, C.; Hibbard, P.B.; Graham, B. Binocular vision supports the development of scene segmentation capabilities: Evidence from a deep learning model. J. Vis. 2021, 21, 13. [Google Scholar] [CrossRef]
- Lou, Q.; Lu, J.H.; Wen, L.H.; Xiao, J.Y.; Zhang, G.X.; Hou, X. High-precision Camera Calibration Method Based on Sub-pixel Edge Detection. Acta Opt. Sin. 2022, 42, 90–98. [Google Scholar]
- Chen, G.H.; Ge, M.Y.; Huang, B.Y.; Liang, G.X.; Li, X.K. Binocular vision-based tilt detection method for power towers. J. Beijing Jiaotong Univ. 2022, 46, 128–137. [Google Scholar]
- Luo, J.F.; Qiu, G.; Zhang, Y.; Feng, S.; Han, L. Research on speeded up robust feature binocular vision matching algorithm based on adaptive double threshold. Chin. J. Sci. Instrum. 2020, 41, 240–247. [Google Scholar]
- Lowe, D.G. Distinctive image features from scale-invariant keypoints. Int. J. Comput. Vis. 2004, 60, 91–110. [Google Scholar] [CrossRef]
- Wang, B.Y.; Zhang, X.H.; Wang, W.B. Feature Matching Method Based on SURF and Fast Library for Approximate Nearest Neighbor Search. Integr. Ferroelectr. 2021, 218, 147–154. [Google Scholar]
- Zhang, Z. Flexible camera calibration by viewing a plane from unknown orientations. In Proceedings of the Seventh IEEE International Conference on Computer Vision, Kerkyra, Greece, 20–27 September 1999. [Google Scholar]























{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Camera Parameters | Left Camera | Right Camera |
|---|---|---|
| Intrinsic matrix | ||
| Radial distortion | (0.08173, −0.15417, 0) | (0.08913, −0.27026, 0) |
| Tangential distortion | (0.00123, −0.00406) | (0.00147, −0.00258) |
| Translation vector | (−60.17687, 0.19712, 1.91753) | |
| Rotational vector | (0.00413, 0.00032, −0.00074) | |
| Calculation Method | Coordinate | Target 1 | Target 2 | Target 3 | Target 4 | Target 5 |
|---|---|---|---|---|---|---|
| Fitting result | u | 576.07 | 624.27 | 685.51 | 741.72 | 754.93 |
| v | 199.06 | 108.52 | 94.81 | 111.07 | 180.94 | |
| Manual positioning | u | 576 | 624 | 685 | 741 | 754 |
| v | 200 | 109 | 95 | 112 | 181 |
| Moving Distance | Algorithm | Target 1 | Target 2 | Target 3 | Target 4 | Target 5 |
|---|---|---|---|---|---|---|
| 0 mm | RSBV | 20.06 | 20.13 | 20.10 | 20.06 | 20.01 |
| SGBM | 20.58 | 20.35 | 20.53 | 20.82 | 20.54 | |
| 100 mm | RSBV | 20.26 | 20.33 | 20.27 | 19.79 | 20.26 |
| SGBM | 20.83 | 20.68 | 20.32 | 20.68 | 20.64 | |
| 150 mm | RSBV | 19.96 | 20.04 | 19.98 | 20.25 | 19.98 |
| SGBM | 20.66 | 20.63 | 20.68 | 20.69 | 20.82 |
| Target Relative Distance | Moving Distance | Move 0 mm | Move 100 mm | Move 150 mm | |||
|---|---|---|---|---|---|---|---|
| Algorithm | RSBV | SGBM | RSBV | SGBM | RSBV | SGBM | |
| 1–2 | Actual distance/mm | 304 | 302 | 320 | |||
| Measurement results/mm | 306.00 | 315.28 | 299.92 | 288.61 | 315.67 | 305.64 | |
| Absolute error/mm | 2.00 | 11.28 | −2.08 | −13.39 | −4.33 | −14.36 | |
| Relative error/% | 0.66% | 3.71% | −0.69% | −4.43% | −1.35% | −4.49% | |
| 2–3 | Actual distance/mm | 190 | 192 | 381 | |||
| Measurement results/mm | 188.39 | 183.93 | 194.06 | 200.50 | 376.29 | 361.50 | |
| Absolute error/mm | −1.61 | −6.07 | 2.06 | 8.50 | −4.71 | −19.50 | |
| Relative error/% | −0.85% | −3.20% | 1.07% | 4.43% | −1.23% | −5.12% | |
| 3–4 | Actual distance/mm | 177 | 184 | 344 | |||
| Measurement results/mm | 175.73 | 172.85 | 185.99 | 176.12 | 347.82 | 334.95 | |
| Absolute error/mm | −1.27 | −4.15 | 1.99 | −7.88 | 3.82 | −9.05 | |
| Relative error/% | −0.72% | −2.35% | 1.08% | −4.28% | 1.11% | −2.63% | |
| 4–5 | Actual distance/mm | 215 | 226 | 228 | |||
| Measurement results/mm | 212.86 | 207.02 | 228.81 | 215.68 | 226.98 | 221.95 | |
| Absolute error/mm | −2.14 | −7.98 | 2.81 | −10.32 | −1.02 | −6.05 | |
| Relative error/% | −0.99% | −3.71% | 1.24% | −4.57% | −0.45% | −2.65% | |
| 1–5 (Two sides) | Actual distance/mm | 554 | 529 | 815 | |||
| Measurement results/mm | 540.30 | 524.40 | 520.74 | 509.50 | 807.50 | 774.48 | |
| Absolute error/mm | −13.70 | −29.60 | −8.26 | −19.50 | −7.50 | −40.52 | |
| Relative error/% | −2.47% | −5.34% | −1.56% | −3.69% | −0.92% | −4.97% | |
| 2–4 (Two shoulder angles) | Actual distance/mm | 350 | 368 | 619 | |||
| Measurement results/mm | 352.75 | 344.20 | 364.74 | 338.32 | 627.33 | 597.56 | |
| Absolute error/mm | 2.75 | −5.80 | −3.26 | −29.68 | 8.33 | −21.44 | |
| Relative error/% | 0.78% | −1.66% | −0.88% | −8.06% | 1.35% | −3.46% | |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Shan, P.; Yan, C.; Lai, X.; Sun, H.; Li, C.; Chen, X. Evaluation of Real-Time Perception of Deformation State of Host Rocks in Coal Mine Roadways in Dusty Environment. Sustainability 2023, 15, 2816. https://doi.org/10.3390/su15032816
Shan P, Yan C, Lai X, Sun H, Li C, Chen X. Evaluation of Real-Time Perception of Deformation State of Host Rocks in Coal Mine Roadways in Dusty Environment. Sustainability. 2023; 15(3):2816. https://doi.org/10.3390/su15032816
Chicago/Turabian StyleShan, Pengfei, Chengwei Yan, Xingping Lai, Haoqiang Sun, Chao Li, and Xingzhou Chen. 2023. "Evaluation of Real-Time Perception of Deformation State of Host Rocks in Coal Mine Roadways in Dusty Environment" Sustainability 15, no. 3: 2816. https://doi.org/10.3390/su15032816