
Modeling and Analysis of the Impact of Risk Culture on Human Behavior during a Catastrophic Event
 , ,
, ,  ,
,  , , ,
, , ,
Abstract
:1. Introduction
2. Behavior Characterization
2.1. Behavioral Diversity Drawn from a Variety of Corpora
2.1.1. Concerning the Collection of Data and Knowledge Regarding Human Behavior during Real Disasters
2.1.2. Concerning the Collection of Data and Knowledge Regarding Human Behavior during Simulated Disasters
2.2. Behavioral Categories
- Alert states (A) that designate a set of micro-behaviors that can be observed from physical movements (a startled expression, rapid eye movements, questioning people nearby verbally or with the eyes). The alert state corresponds to a phase of assimilation. It marks a break from ordinary behavior and corresponds to the very short time spent looking for information about the scenario the participant is experiencing. In the alert state, the person is in a state of uncertainty; the emotional charge is low even if some body signals may signal a break with the everyday behavior previously mentioned, such as for example an increased heartbeat rate.
- The controlled states or behaviors (C) are deliberate behaviors which designate a set of reactions with a more or less strong emotional charge that is regulated. Controlled behaviors are diverse: they can designate pro-social behaviors (mutual aid, protection, caring for others) but also anti-social behaviors (theft, looting, voyeurism, etc.). In other words, the notion of control designates the ability to regulate one’s emotions, to act and to adapt one’s behavior to the crisis context (it does not mean, however, that the behavior ensures the safety or survival of the person nor that it is virtuous, social, or exemplary with respect to a social norm).
- The set of panic behaviors (P) refers to uncontrolled behaviors dominated by fear-related emotions. Panic behavior implies a strong emotional charge and weak regulation, which is ineffective for regaining a controlled state. Different behaviors can reflect a panic state: panic flight, stupor, disorderly agitation [10].
- Alert states: low emotional charge and high emotional regulation.
- Controlled states: low or high emotional charge and high emotional regulation.
- Panic states: high emotional charge and low emotional regulation.
- The alert state can be very short and most often occurs at the very beginning of the event. However, depending on the characteristics of the event, if it is repeated as during earthquakes for example, the alert state may return, notably after a controlled state, but this is more rarely observed.
- An individual must pass through a controlled state to recover a pseudo-ordinary, everyday behavior which cannot be recovered as long as the person is in a panic state.
- We considered behavioral transitions according to two distinct processes: aggregation on one hand and imitation and propagation on the other. These processes, presented below, allow us to study the behavioral dynamics:
- -
- Intrinsic transitions linked to individual characteristics (age, experience, risk culture, etc.) and behaviors become collective by aggregation when a synchronization of individual behaviors occurs without necessarily any voluntary coordination or interaction among the group.
- -
- Transitions due to imitation and propagation, which allow us to understand the emergence of collective behaviors due to interaction within a population or a crowd. In some cases, the contagion processes can be caused by imitation, which is linked to a well-known phenomenon in social psychology, that is, social comparison [40]. The only behaviors that cannot be imitated are of the alert type. By nature, and because they are short, they cannot be imitated by populations in a panic or controlled state [48]. These propagation and imitation processes are used to study the dissemination of behaviors in time and space.
- Despite several interviews and focus groups carried out with a variety of persons who have experienced crises, knowledge is still uncertain regarding the changes in behavior linked to the presence of deceased people on a disaster scene. We therefore posit as a hypothesis that the impact of mortality on behavior does not create a feedback loop.
3. Development of the Alert–Panic–Control Mathematical Model and Simulation of Behavioral Dynamics
3.1. The APC Mathematical Model
- is the density of population in a state of alert;
- is the density of population in a state of panic;
- is the density of population in a state of control.
- the density of population with an everyday behavior;
- all the behaviors of everyday life after the disaster;
- the density of the population that loses its life during the disaster.
3.2. Scenarios of Behavioral Dynamics for Different Levels of Risk Culture and Population Density
3.2.1. Scenario of a Dense Population with a Low Risk Culture
3.2.2. Scenario of a Sparse Population with a Low Risk Culture
3.2.3. Scenario of a Dense Population with a High Risk Culture
3.2.4. Scenario of a Sparse Population with a High Risk Culture
4. Qualitative Analysis of the Dynamics before the Return to Pseudo-Everyday Behaviors
- is the rate of the intrinsic transition from panic to control;
- is the rate of the intrinsic transition from control to panic;
- is the coefficient of the imitation term from panic to control;
- is the coefficient of the imitation term from control to panic.
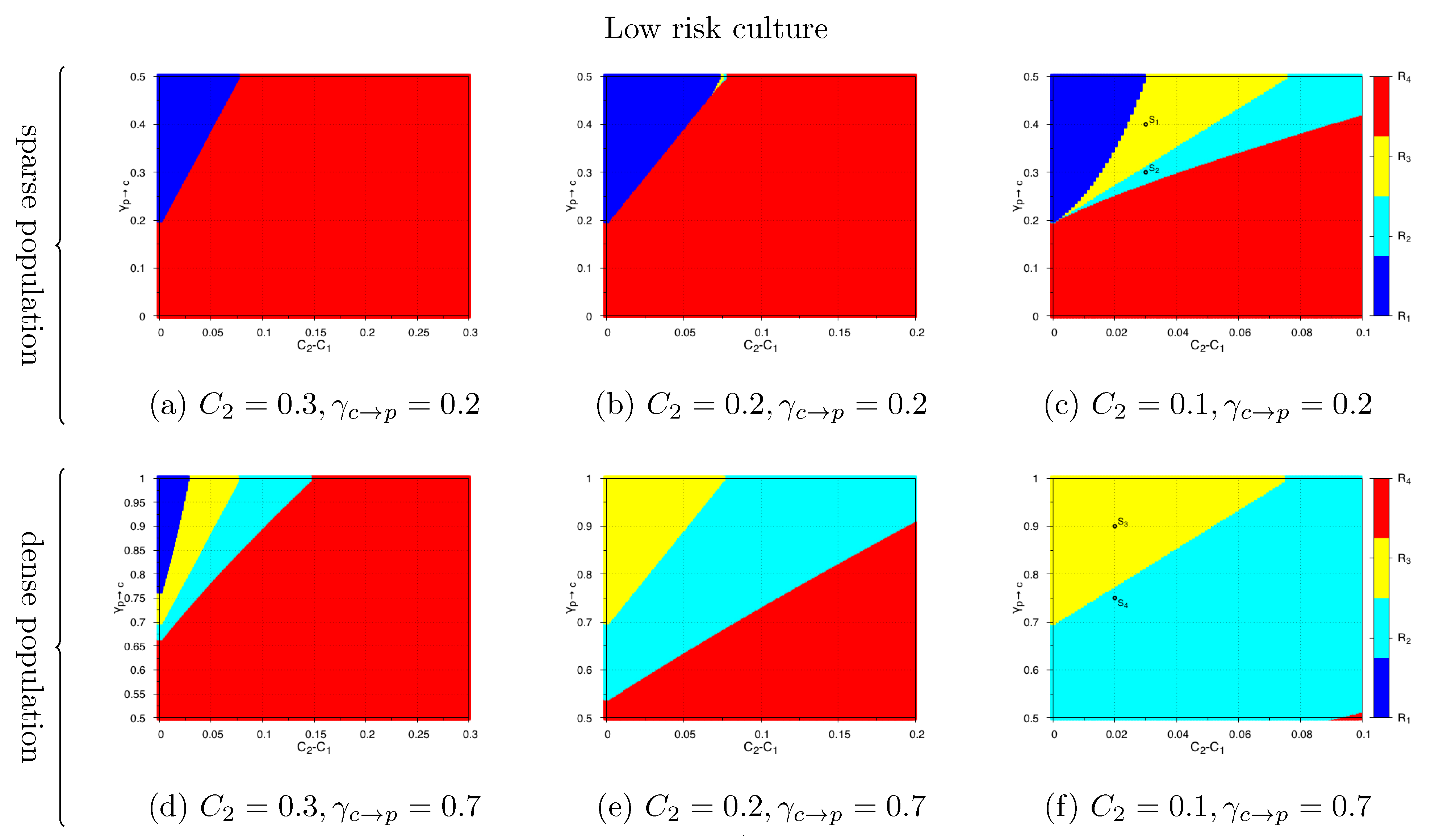
4.1. Low Risk Culture
- In region (dark blue), we have a unique equilibrium point of the form , where . Since , it means that in this configuration, the density of population with controlled behaviors is greater than , and thus, controlled behaviors are predominant during the transient dynamics.
- In region (cyan), there are three equilibrium points of the form . Two of them exhibit while the third one has .
- In region (yellow), there are three equilibrium points of the form . One of them exhibits , while the other two have .
- In region (red), the system exhibits a unique equilibrium point of the form , where . For these parameters’ values, our system converges toward an equilibrium with a majority of panic reactions.
- The difference in value between the intrinsic transitions and must be small.
- The process of imitation from panic to control must dominate the opposite process: that is, the process of imitating individuals in a state of panic. Notably, we were able to demonstrate that the coefficient relating to the imitation from panic to control must be greater than .
4.2. High Risk Culture
- The difference in value between the intrinsic transitions and is small.
- The process of imitation from control to panic is predominant compared to the process in the other direction: that is, the imitation of controlled persons by persons in a state of panic. Notably, we were able to demonstrate that the coefficient relating to the imitation from control to panic must be greater than .
5. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
Appendix A

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Functions | Notation |
|---|---|
| Beginning of the catastrophe | |
| Leaving from the impact zone | |
| Imitation functions |
| Parameters | Notation |
|---|---|
| Intrinsic evolution from alert to control | |
| Intrinsic evolution from alert to panic | |
| Intrinsic evolution from control to alert | |
| Intrinsic evolution from panic to alert | |
| Intrinsic evolution from panic to control | |
| Intrinsic evolution from control to panic | |
| Mortality rates | , , |
| Imitation from alert to control | |
| Imitation from alert to panic | |
| Imitation from panic to control | |
| Imitation from control to panic |
Appendix B
| # | a4 | a3 | a2 | a1 | a0 | Number of Sign Changes |
|---|---|---|---|---|---|---|
| 1 | + | + | + | + | − | 1 |
| 2 | + | + | + | − | − | 1 |
| 3 | + | + | − | − | − | 1 |
| 4 | + | + | − | + | − | 3 |
| 5 | + | − | − | + | − | 3 |
| 6 | + | − | + | + | − | 3 |
| 7 | + | − | + | − | − | 3 |
| 8 | + | − | − | − | − | 1 |
- Case 1: conditions , and imply .
- Case 2: it is not possible to have at the same time and . Therefore, this case is not admissible.
- Case 3: it is not possible to have at the same time and . Therefore, this case is not admissible.
- Case 8: conditions , and imply .
- In case of low risk culture (that is, when )
- -
- If , then the system exhibits only one equilibrium point;
- -
- If , then the system exhibits either three or one equilibrium points.
- In case of strong risk culture (that is, when )
- -
- If , then the system exhibits only one equilibrium point;
- -
- If , then the system exhibits either three or one equilibrium points.
- (i)
- In Case 1, , then , so the unique solution of (A3) in the interval is actually in the interval . An equilibrium point of the system is thus in the form with . We have a majority of people in the panic behavior than in the control one.
- (ii)
- If , then . This implies then is an equilibrium point of the system.
- (iii)
- In Case 8, we have . This implies , so the unique root of (A3) in the interval locates in the interval . An equilibrium point of the system is thus in the form with . We have a majority of people in the control behavior rather than in the panic one.
- is the rate of the intrinsic transition from alert to control;
- is the rate of the intrinsic transition from alert to panic;
- is the coefficient of the imitation term from alert to control;
- is the coefficient of the imitation term from alert to panic.

| Simulations | S1 | S2 | S3 | S4 | |
|---|---|---|---|---|---|
| Parameters | |||||
| 0.07 | 0.07 | 0.08 | 0.08 | ||
| 0.1 | 0.1 | 0.1 | 0.1 | ||
| 0.4 | 0.3 | 0.9 | 0.75 | ||
| 0.2 | 0.2 | 0.7 | 0.7 | ||
| 0.05 | 0.05 | 0.05 | 0.05 | ||
| 0.4 | 0.4 | 0.7 | 0.7 | ||
References
- Dauphiné, A.; Provitolo, D. Risques et Catastrophes: Observer, Spatialiser, Comprendre, Gérer; Armand Colin: Paris, France, 2013. [Google Scholar]
- Mal, S.; Singh, R.B.; Huggel, C. Climate Change, Extreme Events and Disaster Risk Reduction: Towards Sustainable Development Goals; Springer: Berlin/Heidelberg, Germany, 2017. [Google Scholar]
- Douvinet, J.; Serra-Llobet, A.; Bopp, E.; Kondolf, G.M. Are sirens effective tools to alert the population in France? Nat. Hazards Earth Syst. Sci. 2021, 21, 2899–2920. [Google Scholar] [CrossRef]
- Rivera, J.D. Disaster and Emergency Management Methods: Social Science Approaches in Application; Routledge: London, UK, 2021. [Google Scholar]
- Moussaïd, M. Fouloscopie: Ce Que la Foule Dit de Nous; HumenSciences: Paris, France, 2019. [Google Scholar]
- Papagiannaki, K.; Kotroni, V.; Lagouvardos, K.; Ruin, I.; Bezes, A. Urban area response to flash flood–triggering rainfall, featuring human behavioral factors: The case of 22 October 2015 in Attica, Greece. Weather Clim. Soc. 2017, 9, 621–638. [Google Scholar] [CrossRef]
- Ripley, A. The Unthinkable: Who Survives When Disaster Strikes-and Why; Harmony: New York, NY, USA, 2009. [Google Scholar]
- Ruin, I.; Lutoff, C.; Boudevillain, B.; Creutin, J.D.; Anquetin, S.; Rojo, M.B.; Boissier, L.; Bonnifait, L.; Borga, M.; Colbeau-Justin, L.; et al. Social and hydrological responses to extreme precipitations: An interdisciplinary strategy for postflood investigation. Weather Clim. Soc. 2014, 6, 135–153. [Google Scholar] [CrossRef] [Green Version]
- Fenet, J.; Daudé, É. La population, grande oubliée des politiques de prévention et de gestion territoriales des risques industriels: Le cas de l’agglomération rouennaise. Cybergeo Eur. J. Geogr. 2020. [Google Scholar] [CrossRef] [Green Version]
- Crocq, L. Paniques Collectives (Les); Odile Jacob: Paris, France, 2013. [Google Scholar]
- Quarantelli, E.L. Panic behavior in fire situations: Findings and a model from the English language research literature. In Proceedings of the UJNR Panel on Fire Research and Safety, 4th Joint Panel Meeting, Tokyo, Japan, 13–20 March 1979; pp. 405–428. [Google Scholar]
- Glass, T.A.; Schoch-Spana, M. Bioterrorism and the people: How to vaccinate a city against panic. Clin. Infect. Dis. 2002, 34, 217–223. [Google Scholar] [CrossRef] [Green Version]
- Helbing, D.; Mukerji, P. Crowd disasters as systemic failures: Analysis of the Love Parade disaster. EPJ Data Sci. 2012, 1, 7. [Google Scholar] [CrossRef] [Green Version]
- Dupuy, J.P. La Panique; Les Empêcheurs de Penser en Ronde: Paris, France, 1991. [Google Scholar]
- Parrochia, D. La Forme des Crises; Éditions du Champ Vallon: Seyssel, France, 2008. [Google Scholar]
- Keating, J.P. The myth of panic. Fire J. 1982, 76, 57–61. [Google Scholar]
- Noto, R.; Huguenard, P.; Larcan, A. Médecine de Catastrophe; Masson: Admiralty, France, 1994. [Google Scholar]
- Drury, J.; Cocking, C.; Reicher, S. Everyone for themselves? A comparative study of crowd solidarity among emergency survivors. Br. J. Soc. Psychol. 2009, 48, 487–506. [Google Scholar] [CrossRef] [Green Version]
- Mawson, A.R. Understanding mass panic and other collective responses to threat and disaster. Psychiatry Interpers. Biol. Process. 2005, 68, 95–113. [Google Scholar] [CrossRef] [Green Version]
- Quarantelli, E.L. Conventional beliefs and counterintuitive realities. Soc. Res. Int. Q. 2008, 75, 873–904. [Google Scholar] [CrossRef]
- Fischer, H.W. Response to Disaster: Fact versus Fiction & Its Perpetuation: The Sociology of Disaster; University Press of America: Lanham, MD, USA, 1998. [Google Scholar]
- Dubos-Paillard, E.; Connault, A.; Provitolo, D.; Haule, S.; Chalonge, L.; Berred, A. Com2SiCa (2) A database to explore the human behavior at the very moment of disasters. In Proceedings of the AAG 2019 Annual Meeting, Washington, DC, USA, 3–7 April 2019. [Google Scholar]
- Provitolo, D.; Dubos Paillard, E.; Verdière, N.; Lanza, V.; Charrier, R.; Bertelle, C.; Aziz Alaoui, M. Comportamientos humanos en situación de desastre: De la observación a la modelización conceptual y matemática. Cybergeo Eur. J. Geogr. 2021. [Google Scholar] [CrossRef]
- Helbing, D.; Molnar, P. Social force model for pedestrian dynamics. Phys. Rev. E 1995, 51, 4282. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Zeng, W.; Nakamura, H.; Chen, P. A modified social force model for pedestrian behavior simulation at signalized crosswalks. Procedia-Soc. Behav. Sci. 2014, 138, 521–530. [Google Scholar] [CrossRef] [Green Version]
- Cornes, F.; Frank, G.; Dorso, C.O. Fear propagation and the evacuation dynamics. Simul. Model. Pract. Theory 2019, 95, 112–133. [Google Scholar] [CrossRef]
- Tong, W.; Cheng, L. Simulation of pedestrian flow based on multi-agent. Procedia-Soc. Behav. Sci. 2013, 96, 17–24. [Google Scholar] [CrossRef] [Green Version]
- Martinez-Gil, F.; Lozano, M.; García-Fernández, I.; Fernández, F. Modeling, evaluation, and scale on artificial pedestrians: A literature review. ACM Comput. Surv. CSUR 2017, 50, 1–35. [Google Scholar] [CrossRef] [Green Version]
- Chalons, C.; Goatin, P.; Seguin, N. General constrained conservation laws. Application to pedestrian flow modeling. Netw. Heterog. Media 2013, 8, 433. [Google Scholar] [CrossRef]
- Bellomo, N.; Dogbe, C. On the modeling of traffic and crowds: A survey of models, speculations, and perspectives. SIAM Rev. 2011, 53, 409–463. [Google Scholar] [CrossRef]
- Sanders, L. Models in Spatial Analysis; John Wiley & Sons: Hoboken, NJ, USA, 2013. [Google Scholar]
- Maury, B.; Faure, S. Crowds in Equations: An Introduction to the Microscopic Modeling of Crowds; World Scientific: Singapore, 2018. [Google Scholar]
- Banos, A.; Lang, C.; Marilleau, N. Agent-Based Spatial Simulation with NetLogo, Volume 2: Advanced Concepts; Elsevier: Amsterdam, The Netherlands, 2016. [Google Scholar]
- Daudé, E.; Chapuis, K.; Taillandier, P.; Tranouez, P.; Caron, C.; Drogoul, A.; Gaudou, B.; Rey-Coyrehourcq, S.; Saval, A.; Zucker, J.D. ESCAPE: Exploring by simulation cities awareness on population evacuation. In Proceedings of the 16th International Conference on Information Systems for Crisis Response and Management (ISCRAM 2019), Valencia, Spain, 19–22 May 2019; pp. 76–93. [Google Scholar]
- Lanza, V.; Dubos-Paillard, E.; Charrier, R.; Verdière, N.; Provitolo, D.; Navarro, O.; Bertelle, C.; Cantin, G.; Berred, A.; Aziz-Alaoui, M. Spatio-Temporal Dynamics of Human Behaviors During Disasters: A Mathematical and Geographical Approach. In Complex Systems, Smart Territories and Mobility; Springer: Berlin/Heidelberg, Germany, 2021; pp. 201–218. [Google Scholar]
- Massaguer, D.; Balasubramanian, V.; Mehrotra, S.; Venkatasubramanian, N. Multi-agent simulation of disaster response. In Proceedings of the ATDM Workshop in AAMAS, Hakodate, Japan, 8–12 May 2006; Volume 2006. [Google Scholar]
- D’Orazio, M.; Spalazzi, L.; Quagliarini, E.; Bernardini, G. Agent-based model for earthquake pedestrians’ evacuation in urban outdoor scenarios: Behavioural patterns definition and evacuation paths choice. Saf. Sci. 2014, 62, 450–465. [Google Scholar] [CrossRef]
- Wang, X.; Zhang, L.; Lin, Y.; Zhao, Y.; Hu, X. Computational models and optimal control strategies for emotion contagion in the human population in emergencies. Knowl.-Based Syst. 2016, 109, 35–47. [Google Scholar] [CrossRef]
- Cantin, G.; Verdière, N.; Lanza, V.; Aziz-Alaoui, M.; Charrier, R.; Bertelle, C.; Provitolo, D.; Dubos-Paillard, E. Mathematical modeling of human behaviors during catastrophic events: Stability and bifurcations. Int. J. Bifurc. Chaos 2016, 26, 1630025. [Google Scholar] [CrossRef]
- Festinger, L. A theory of social comparison processes. Hum. Relat. 1954, 7, 117–140. [Google Scholar] [CrossRef]
- Fiske, S.T.; Taylor, S.E. Social Cognition: From Brains to Culture; Sage: Newcastle upon Tyne, UK, 2013. [Google Scholar]
- Mikolajczak, M.; Desseilles, M. Traité de Régulation des Émotions; De Boeck Supérieur: Bruxelles, Belgium, 2012. [Google Scholar]
- Provitolo, D.; Tricot, A.; Schleyer-Lindenmann, A.; Boudoukha, A.; Verdière, N.; Haule, S.; Dubos-Paillard, E.; Lanza, V.; Charrier, R.; Bertelle, C.; et al. Saisir les comportements humains en situation de catastrophes: Proposition d’une démarche méthodologique immersive. Cybergeo Rev. Eur. Géogr./Eur. J. Geogr. 2022. [Google Scholar] [CrossRef]
- Moussaïd, M.; Kapadia, M.; Thrash, T.; Sumner, R.W.; Gross, M.; Helbing, D.; Hölscher, C. Crowd behaviour during high-stress evacuations in an immersive virtual environment. J. R. Soc. Interface 2016, 13, 20160414. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Verhulst, E.; Richard, P.; Provitolo, D.; Navarro-Carrascal, O. Virtual Tsunami: Navigation technique and user behavior analysis during emergency. In Proceedings of the 1st International Conference for Multi-Area Simulation-ICMASim, Angers, France, 8–10 October 2019. [Google Scholar]
- Boschetti, L.; Provitolo, D.; Tric, E. A method to analyze territory resilience to natural hazards, the example of the French Riviera against tsunami. In Proceedings of the EGU General Assembly Conference Abstracts, Vienna, Austria, 23–28 April 2017; Volume 19, p. 12935. [Google Scholar]
- Russell, J.A. A circumplex model of affect. J. Personal. Soc. Psychol. 1980, 39, 1161. [Google Scholar] [CrossRef]
- Bandura, A. Social Learning Theory; General Learning Press: Morristown, NJ, USA, 1971. [Google Scholar]
- Laborit, H. La légende des Comportements; Flammarion: Paris, France, 1994. [Google Scholar]
- Selye, H. The stress concept. Can. Med. Assoc. J. 1976, 115, 718. [Google Scholar]
- Verdière, N.; Navarro, O.; Naud, A.; Berred, A.; Provitolo, D. Towards Parameter Identification of a Behavioral Model from a Virtual Reality Experiment. Mathematics 2021, 9, 3175. [Google Scholar] [CrossRef]
- Hethcote, H.W. The mathematics of infectious diseases. SIAM Rev. 2000, 42, 599–653. [Google Scholar] [CrossRef] [Green Version]
- Brauer, F. Compartmental Models in Epidemiology. In Mathematical Epidemiology; Brauer, F., van den Driessche, P., Wu, J., Eds.; Lecture Notes in Mathematics; Springer: Berlin/Heidelberg, Germany, 2008; Volume 1945. [Google Scholar] [CrossRef]
- Jacquez, J.A.; Simon, C.P. Qualitative theory of compartmental systems. SIAM Rev. 1993, 35, 43–79. [Google Scholar] [CrossRef]
- Gilbert, D.T.; Giesler, R.B.; Morris, K.A. When comparisons arise. J. Personal. Soc. Psychol. 1995, 69, 227. [Google Scholar] [CrossRef]
- Martin, A.; Guéguen, N.; Fischer-Lokou, J. L’imitation humaine: Une synthèse de 50 années de recherche en psychologie sociale. Can. Psychol. Can. 2016, 57, 101. [Google Scholar] [CrossRef] [Green Version]
- Baudonnière, P.M. Le Mimétisme et L’imitation; Flammarion, Dominos: Paris, France, 1997. [Google Scholar]
- Ghesquiere, F.; Kellett, J.; Campbell, J.; Kc, S.; Reid, R. The Sendai Report: Managing Disaster Risks for a Resilient Future; Technical Report; The World Bank: Washington, DC, USA, 2012. [Google Scholar]
- Verdière, N.; Dubos-Paillard, E.; Lanza, V.; Provitolo, D.; Charrier, R.; Bertelle, C.; Berred, A.; Tricot, A.; Aziz-Alaoui, M. Study of the Effect of Rescuers and the Use of a Massive Alarm in a Population in a Disaster Situation. Sustainability 2023, 15, 9474. [Google Scholar] [CrossRef]
- Mikiela, I.; Lanza, V.; Verdière, N.; Provitolo, D. Optimal strategies to control human behaviors during a catastrophic event. AIMS Math. 2022, 7, 18450–18466. [Google Scholar] [CrossRef]
- Lanza, V.; Dubos-Paillard, E.; Charrier, R.; Provitolo, D.; Berred, A. An analysis of the effects of territory properties on population behaviors and evacuation management during disasters using coupled dynamical systems. Appl. Netw. Sci. 2022, 7, 17. [Google Scholar] [CrossRef]
- Alesina, A.; Galuzzi, M. Vincent’s Theorem from a modern point of view. Rend. Circ. Mat. Palermo 2000, 64, 179–191. [Google Scholar]
- Akritas, A.; Strzeboński, A.; Vigklas, P. On the various bisection methods derived from Vincent’s theorem. Serdica J. Comput. 2008, 2, 89–104. [Google Scholar] [CrossRef]












| Risk Culture | Low | Strong | |
|---|---|---|---|
| Density of Population | |||
| dense | , | , | |
| sparse | , | , | |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Lanza, V.; Provitolo, D.; Verdière, N.; Bertelle, C.; Dubos-Paillard, E.; Navarro, O.; Charrier, R.; Mikiela, I.; Aziz-Alaoui, M.; Boudoukha, A.H.; et al. Modeling and Analysis of the Impact of Risk Culture on Human Behavior during a Catastrophic Event. Sustainability 2023, 15, 11063. https://doi.org/10.3390/su151411063
Lanza V, Provitolo D, Verdière N, Bertelle C, Dubos-Paillard E, Navarro O, Charrier R, Mikiela I, Aziz-Alaoui M, Boudoukha AH, et al. Modeling and Analysis of the Impact of Risk Culture on Human Behavior during a Catastrophic Event. Sustainability. 2023; 15(14):11063. https://doi.org/10.3390/su151411063
Chicago/Turabian StyleLanza, Valentina, Damienne Provitolo, Nathalie Verdière, Cyrille Bertelle, Edwige Dubos-Paillard, Oscar Navarro, Rodolphe Charrier, Irmand Mikiela, Moulay Aziz-Alaoui, Abdel Halim Boudoukha, and et al. 2023. "Modeling and Analysis of the Impact of Risk Culture on Human Behavior during a Catastrophic Event" Sustainability 15, no. 14: 11063. https://doi.org/10.3390/su151411063