
A Methodological Framework to Assess Road Infrastructure Safety and Performance Efficiency in the Transition toward Cooperative Driving



Abstract
:1. Introduction
2. Related Research
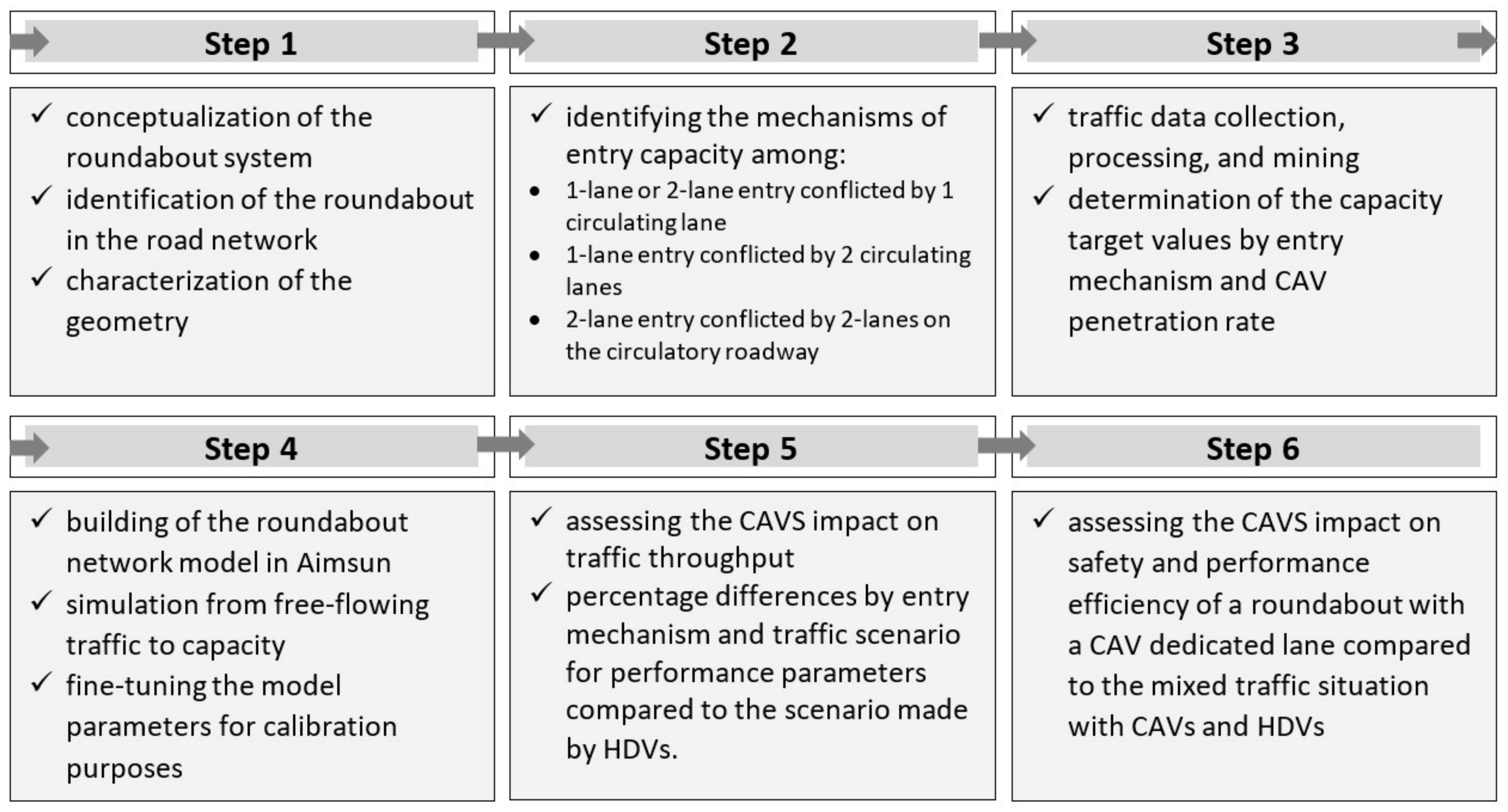
3. Materials and Methods
3.1. Step 1: Conceptualization of the Roundabout System, Identification of the Roundabout in the Road Network, and Characterization of Its Geometry
3.2. Step 2: Identification of the Mechanisms of Entry Capacity
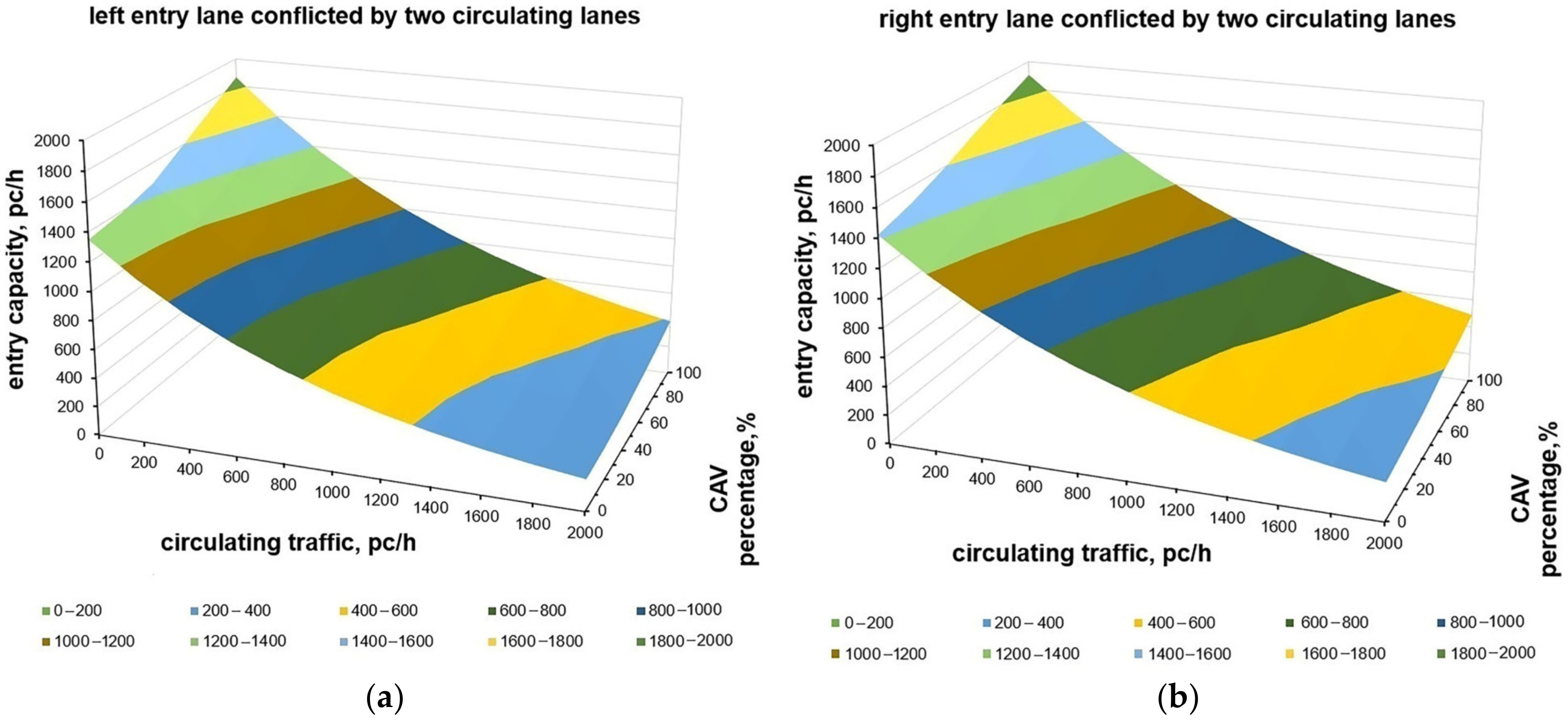
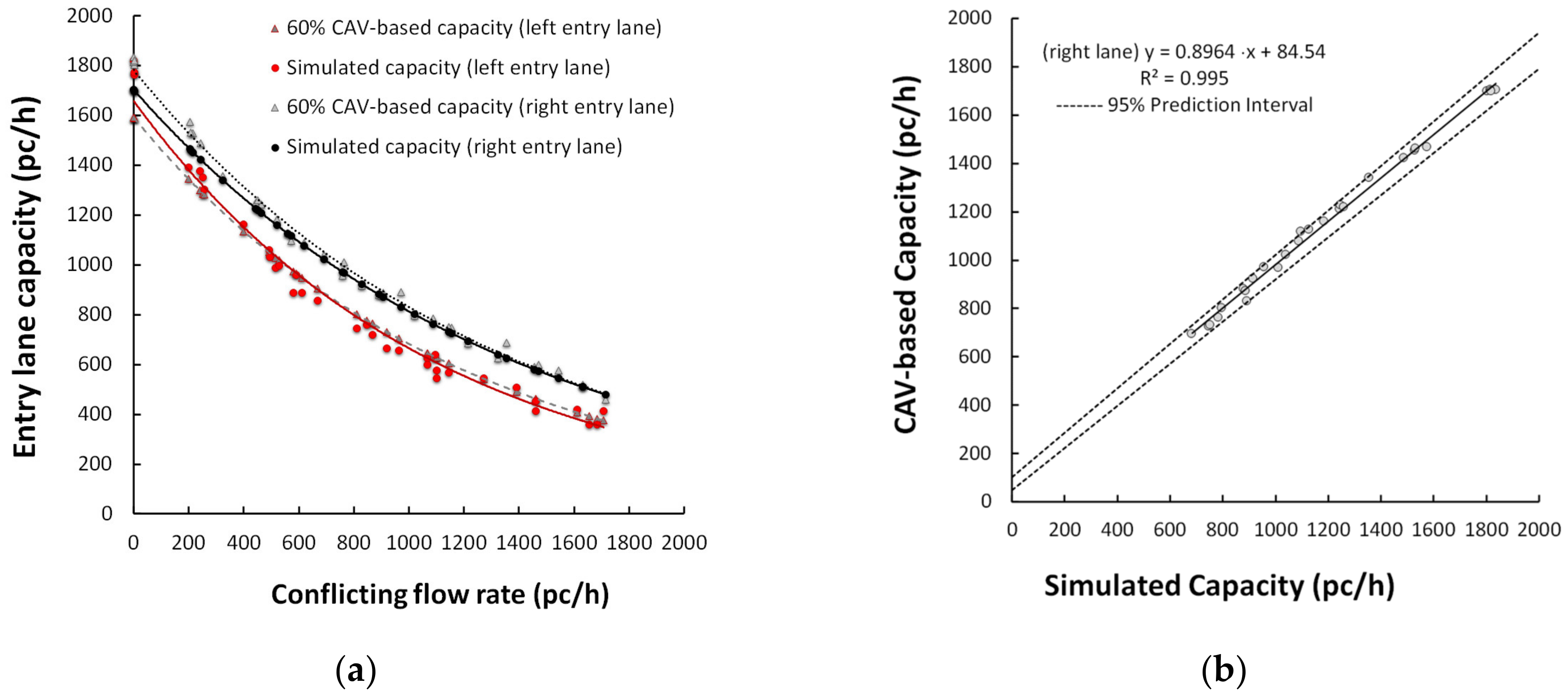
3.3. Step 3: Traffic Data Collection, Processing and Mining, and Determination of the Capacity Target Values for Every Entry Mechanism and CAV Penetration Rate

3.4. Step 4: Building the Roundabout Network Model and Simulation from Free-Flowing Traffic to Capacity for Calibration Purposes

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameters | Default Values | Fine-Tuned Values | ||||||
|---|---|---|---|---|---|---|---|---|
| Entry Mechanism | Penetration Rate of CAVs (%) | |||||||
| 0 | 20 | 40 | 60 | 80 | 100 | |||
| Left entry lane | Speed acceptance 1 | 1.10 | 0.97 | 0.97 | 0.97 | 0.97 | 0.97 | 0.97 |
| Time gap 1 | 0.00 | 1.33 | 1.33 | 1.33 | 1.33 | 1.33 | 1.33 | |
| Reaction time 2 | 0.80 | 0.95 | 0.89 | 0.84 | 0.78 | 0.73 | 0.67 | |
| Max acceleration 3 [m/s2] | 3.00 | 4.00 | 4.00 | 4.00 | 4.00 | 4.00 | 4.00 | |
| Safety margin factor 3 | 1.00 | 0.50 | 0.50 | 0.50 | 0.50 | 0.50 | 0.50 | |
| Sensitivity factor 3 | 1.00 | 0.50 | 0.50 | 0.50 | 0.50 | 0.50 | 0.50 | |
| GEH | 58.33 4 | 90.63 | 100 | 100 | 97.22 | 94.44 | 91.67 | |
| Right entry lane | Speed acceptance 1 | 1.10 | 0.95 | 0.95 | 0.95 | 0.95 | 0.95 | 0.95 |
| Time gap 1 | 0.00 | 1.00 | 1.00 | 1.00 | 1.00 | 1.00 | 1.00 | |
| Reaction time 2 | 0.80 | 0.94 | 0.78 | 0.76 | 0.74 | 0.72 | 0.70 | |
| Max acceleration 3 [m/s2] | 3.00 | 3.50 | 3.50 | 3.50 | 3.50 | 3.50 | 3.50 | |
| Safety margin factor 3 | 1.00 | 0.40 | 0.40 | 0.40 | 0.40 | 0.40 | 0.40 | |
| Sensitivity factor 3 | 1.00 | 0.50 | 0.50 | 0.50 | 0.50 | 0.50 | 0.50 | |
| GEH | 60.40 4 | 100 | 100 | 100 | 100 | 100 | 100 | |
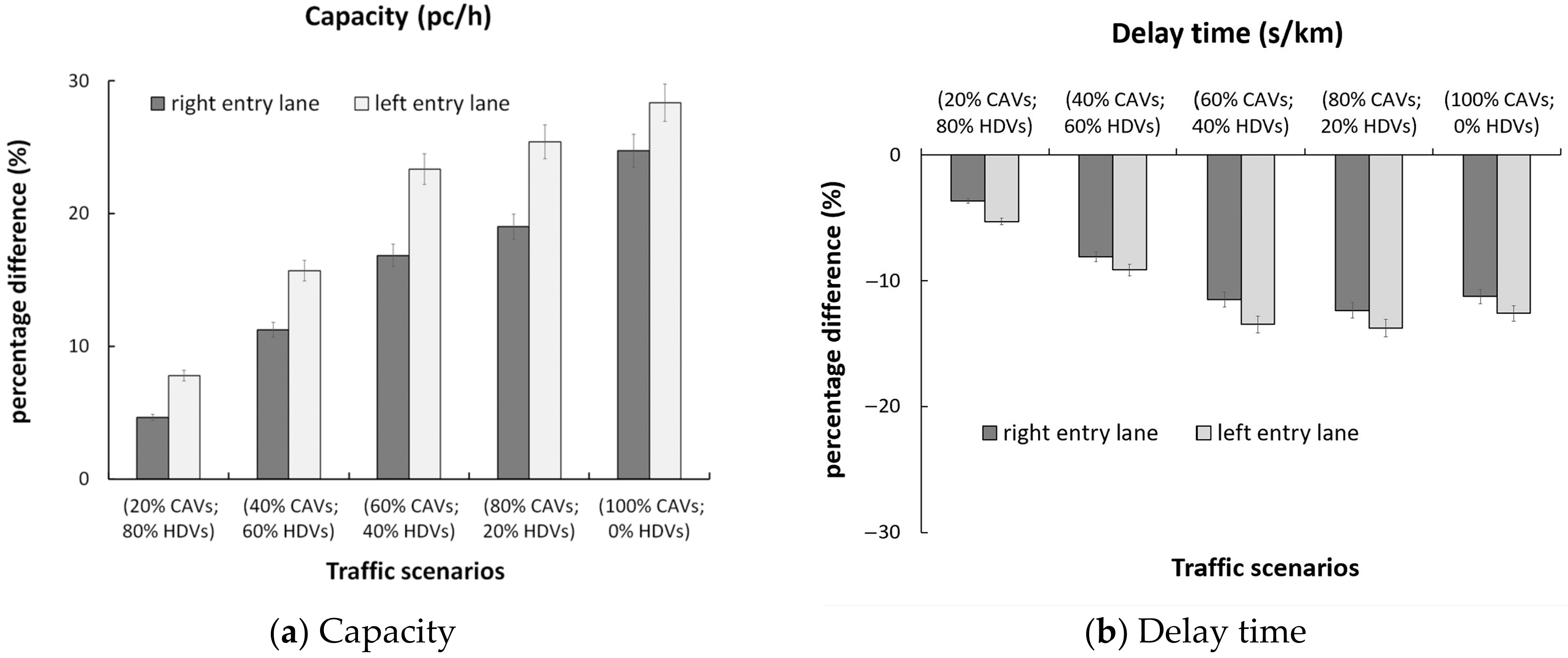
3.5. Step 5: Assessing the CAV Impact on Traffic Throughput

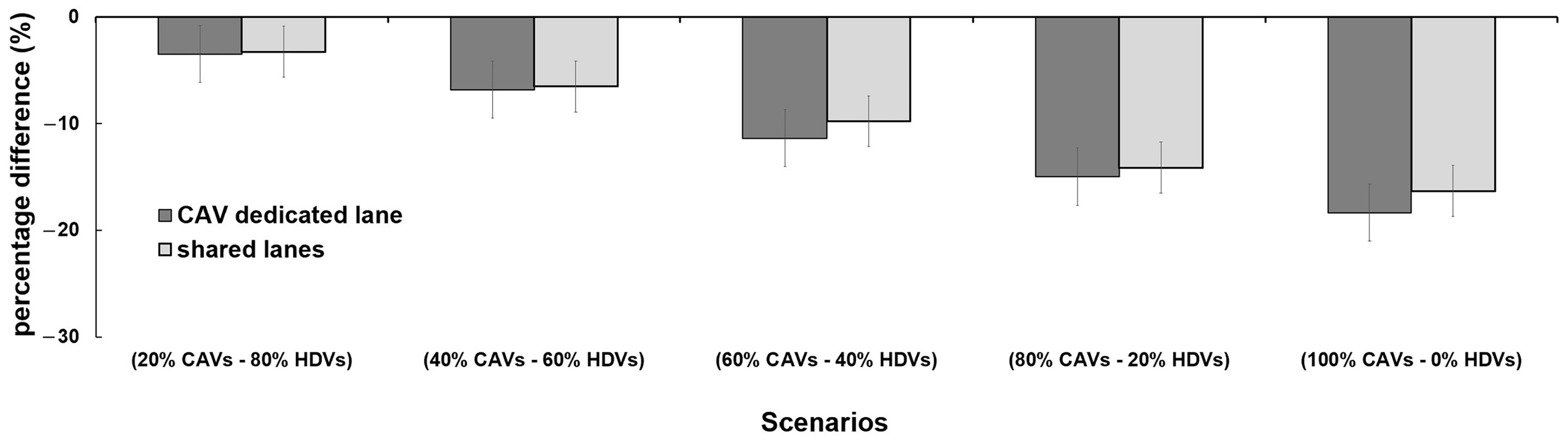
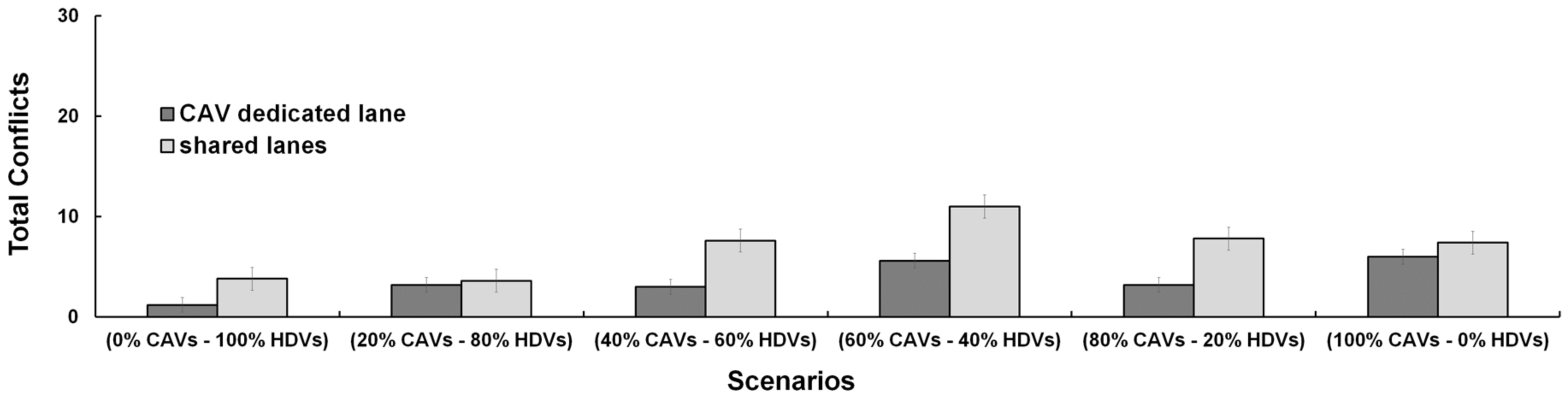
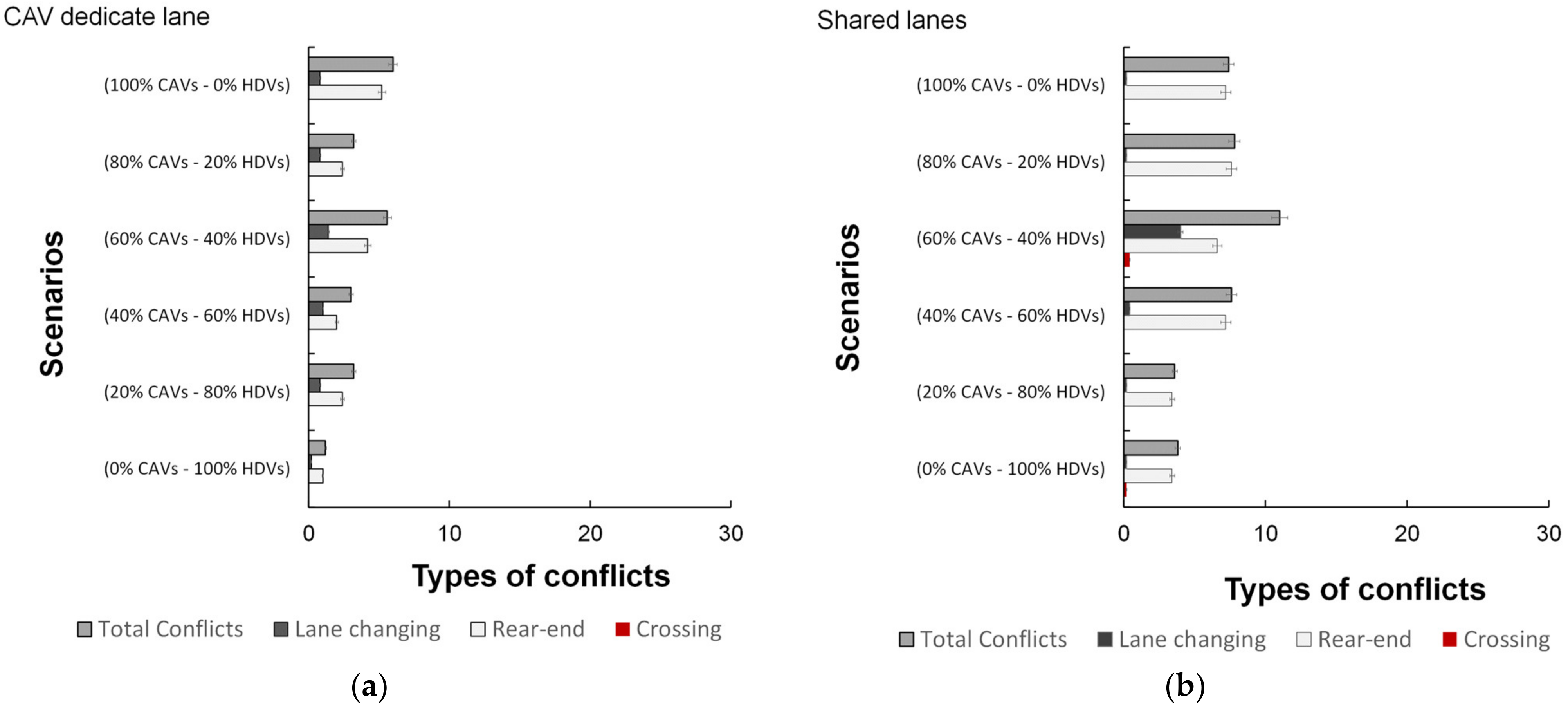
3.6. Step 6: Assessing the CAV Impact on Traffic Throughput and Safety for the Roundabout with a CAV Dedicated Lane Compared to the Mixed Traffic Situation



4. Results
5. Discussion
- (1)
- This research was primarily focused on the comparison in terms of safety and operational performances at the single road entity level. Moreover, the roundabout network model simulated in Aimsun meets the geometry and traffic characteristics of a real-life large roundabout chosen as case study where vehicular traffic flows were balanced along the major and minor directions of driving. Future developments should also be conducted at road corridor or network level, varying not only the roundabout geometry but also the traffic demand matrices to investigate the effects of different geometric shapes (i.e., outer diameter size, number of entry, exit and circulating lanes, etc.), spacing, and traffic patterns on the performance efficiency and speed management on roundabouts.
- (2)
- Despite the observed effects on traffic safety and efficiency due to the design of dedicated lanes (with mandatory or optional use) to separate CAVs from HDVs on roundabouts, nothing can be said about conflicts attributable only to CAVs in mixed traffic situations and their severity. Thus, future research actions should be directed toward addressing the methodological limitations in the analysis of shared situations where CAVs and HDVs interact, in order to better incorporate the abovementioned conflict characteristics into decision support tools.
- (3)
- The research results were given in the terms of an evaluation framework of the model’s practical application and simulation verification, but they showed only a projection of what might happen if CAVs were fully widespread on the road network. This perspective also highlights the need for efficient methods to assess the potential of CAVs and to enhance their throughput through an intelligent road management in view of future mobility strategies. It is appropriate to deepen issues on smart roundabout design to make the road network in operation suitable for the progressive transition toward the full implementation of CAV technologies. There is also a need to hypothesize how a control area performs in order to implement communications among CAVs with the road infrastructure manager system (see [62] for the turbo roundabout case).
6. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Javed, A.R.; Shahzad, F.; Rehman, S.U.; Zikria, Y.B.; Razzak, I.; Zunera, J.; Xu, G. Future smart cities: Requirements, emerging technologies, applications, challenges, and future aspects. Cities 2022, 129, 103794. [Google Scholar] [CrossRef]
- Lv, Z.; Shang, W. Impact of Intelligent transportation systems on energy conservation and emission reduction of transport systems: A comprehensive review. Green Technol. Sustain. 2023, 1, 100002. [Google Scholar] [CrossRef]
- Rana, M.M.; Hossain, K. Connected and Autonomous Vehicles and Infrastructures: A Literature Review. Int. J. Pavement Res. Technol. 2021, 14, 1–21. [Google Scholar] [CrossRef]
- SAE International. Taxonomy and Definitions for Terms Related to Driving Automation Systems for On-Road Motor Vehicles; SAE International: Warrendale, PA, USA, 2018. [Google Scholar]
- Brost, M.; Deniz, Ö.; Österle, I.; Ulrich, C.; Senzeybek, M.; Hahn, R.; Schmid, S. Energy Consumption of Connected and Automated Vehicles. In Electric, Hybrid, and Fuel Cell Vehicles, Encyclopedia of Sustainability Science and Technology, 2nd ed.; Elgowainy, A., Ed.; Springer: New York, NY, USA, 2021; pp. 216–224. [Google Scholar]
- Karbasi, A.H.; Mehrabani, B.B.; Cools, M.; Sgambi, L.; Saffarzadeh, M. Comparison of Speed-Density Models in the Age of Connected and Automated Vehicles. Transp. Res. Record 2022, 2677, 849–865. [Google Scholar] [CrossRef]
- Wang, Y.; Yan, Y.; Shen, T.; Bai, S.; Hu, J.; Xu, L.; Yin, G. An Event-Triggered Scheme for State Estimation of Preceding Vehicles Under Connected Vehicle Environment. IEEE Trans. Intell. Veh. 2023, 8, 583–593. [Google Scholar] [CrossRef]
- Duggal, A.S.; Singh, R.; Gehlot, A.; Gupta, L.R.; Akram, S.V.; Prakash, C.; Singh, S.; Kumar, R. Infrastructure, mobility and safety 4.0: Modernization in road transportation. Technol. Soc. 2021, 67, 101791. [Google Scholar] [CrossRef]
- Jang, J.; Baek, J.; Lim, K.; Ro, Y.; Yoon, S.; Jang, S. A Study on V2I based Cooperative Autonomous Driving. In Proceedings of the 2023 International Conference on Electronics, Information, and Communication (ICEIC), Singapore, 5–8 February 2023; pp. 1–3. [Google Scholar] [CrossRef]
- Liu, Y.; Tight, M.; Sun, Q.; Kang, R. A systematic review: Road infrastructure requirement for Connected and Autonomous Vehicles (CAVs). J. Phys. Conf. Ser. 2019, 1187, 042073. [Google Scholar] [CrossRef]
- Martin-Gasulla, M.; Elefteriadou, L. Traffic management with autonomous and connected vehicles at single-lane roundabouts. Transp. Res. Part C Emerg. Technol. 2021, 125, 102964. [Google Scholar] [CrossRef]
- Guo, Q.; Ban, X.B.; Abdul Aziz, H.M. Mixed traffic flow of human driven vehicles and automated vehicles on dynamic transportation networks. Transp. Res. Part C Emerg. Technol. 2021, 128, 103159. [Google Scholar] [CrossRef]
- Gong, B.; Wang, F.; Lin, C.; Wu, D. Modeling HDV and CAV Mixed Traffic Flow on a Foggy Two-Lane Highway with Cellular Automata and Game Theory Model. Sustainability 2022, 14, 5899. [Google Scholar] [CrossRef]
- Ivanjko, E.; Kušic, K.; Greguric, M. Simulational analysis of two controllers for variable speed limit control. Proc. Inst. Civ. Eng.—Transp. 2022, 175, 413–425. [Google Scholar] [CrossRef] [Green Version]
- Raju, N.; Farah, H. Evolution of Traffic Microsimulation and Its Use for Modeling Connected and Automated Vehicles. J. Adv. Transp. 2021, 2021, 2444363. [Google Scholar] [CrossRef]
- National Academies of Sciences, Engineering, and Medicine. Roundabouts: An Informational Guide, 2nd ed.; The National Academies Press: Washington, DC, USA, 2010. [CrossRef]
- National Academies of Sciences, Engineering, and Medicine. Highway Capacity Manual 7th Edition: A Guide for Multimodal Mobility Analysis; The National Academies Press: Washington, DC, USA, 2022. [CrossRef]
- Aimsun Next, Version 20. Dynamic Simulator User Manual. TSS-Transport Simulation Systems: Barcelona, Spain, 2020.
- Barceló, J. Fundamentals of Traffic Simulation; Springer: London, UK, 2010. [Google Scholar]
- Gettman, D.; Pu, L.; Sayed, T.; Shelby, S.G. Surrogate Safety Assessment Model and Validation: Final Report; Georgetown Pike (US) Report FHWA HRT 08–051; Federal Highway Administration: Washington, DC, USA, 2008.
- Michałowska, M.; Ogłoziński, M. Autonomous Vehicles and Road Safety. In Smart Solutions in Today’s Transport: 17th International Conference on Transport Systems Telematics, TST 2017, Katowice–Ustroń, Poland, 5–8 April 2017, Selected Papers 17; Springer International Publishing: Cham, Switzerland, 2017; Volume 715, pp. 191–202. [Google Scholar] [CrossRef]
- Rahman, M.S.; Abdel-Aty, M. Longitudinal safety evaluation of connected vehicles’ platooning on expressways. Accid. Anal. Prev. 2018, 117, 381–391. [Google Scholar] [CrossRef] [PubMed]
- Rahman, M.S.; Abdel-Aty, M.; Wang, L.; Lee, J. Understanding the Highway Safety Benefits of Different Approaches of Connected Vehicles in Reduced Visibility Conditions. Transp. Res. Rec. J. Transp. Res. Board 2018, 2672, 91–101. [Google Scholar] [CrossRef]
- VISSIM, Version 5.30. User Manual PTV Planug Transport Verkehr AG. Manufacture: Karlsruhe, Germany, 2011.
- Ekram, A.; Rahman, M.S. Effects of Connected and Autonomous Vehicles on Contraflow Operations for Emergency Evacuation: A Microsimulation Study. In Proceedings of the Transportation Research Board 97th Annual Meeting, Washington, DC, USA, 7–11 January 2018. [Google Scholar]
- Tumminello, M.L.; Macioszek, E.; Granà, A.; Giuffrè, T. Simulation-Based Analysis of “What-If” Scenarios with Connected and Automated Vehicles Navigating Roundabouts. Sensors 2022, 22, 6670. [Google Scholar] [CrossRef] [PubMed]
- Qiao, J.; Zhang, D.; de Jonge, D. Virtual Roundabout Protocol for Autonomous Vehicles. In Advances in Artificial Intelligence. AI 2018; Mitrovic, T., Xue, B., Li, X., Eds.; Lecture Notes in Computer Science; Springer: Cham, Switzerland, 2018; Volume 11320, pp. 773–782. [Google Scholar]
- Mauro, R. Calculation of Roundabouts. Capacity, Waiting Phenomena and Reliability; Springer: Berlin/Heidelberg, Germany, 2010. [Google Scholar] [CrossRef]
- Martin-Gasulla, M.; Elefteriadou, L. Single-Lane Roundabout Manager under Fully Automated Vehicle Environment. Transp. Res. Rec. J. Transp. Res. Board 2019, 2673, 439–449. [Google Scholar] [CrossRef]
- Wu, Y.; Zhu, F. Junction management for connected and automated vehicles: Intersection or roundabout? Sustainability 2021, 13, 9482. [Google Scholar] [CrossRef]
- Mohebifard, R.; Hajbabaie, A. Trajectory control in roundabouts with a mixed fleet of automated and human-driven vehicles. Comput. -Aided Civ. Infrastruct. Eng. 2022, 37, 1959–1977. [Google Scholar] [CrossRef]
- Wu, R.; Jia, H.; Yang, L.; Miao, H.; Lin, Y.; Zhang, Y. A distributed trajectory control strategy for the connected automated vehicle in an isolated roundabout. IET Intell. Transp. Syst. 2022, 16, 232–251. [Google Scholar] [CrossRef]
- Jalil, K.; Xia, Y.; Zahid, M.N.; Manzoor, T. A Speed Optimization Strategy for Smooth Merging of Connected and Automated Vehicles at T-Shape Roundabout. IEEE Access 2022, 10, 76953–76965. [Google Scholar] [CrossRef]
- Anagnostopoulos, A.; Kehagia, F. CAVs and roundabouts: Research on traffic impacts and design elements. Transp. Res. Procedia 2020, 49, 83–94. [Google Scholar] [CrossRef]
- Pérez, J.; Milanés, V.; de Pedro, T.; Vlacic, L. Autonomous driving manoeuvres in urban road traffic environment: A study on roundabouts. IFAC Proc. 2011, 44, 13795–13800. [Google Scholar] [CrossRef] [Green Version]
- Morando, M.; Truong, L.; Vu, H. Investigating safety impacts of autonomous vehicles using traffic micro-simulation. In Proceedings of the Australasian Transport Research Forum, Auckland, New Zealand, 27–29 November 2017. [Google Scholar]
- Tibljas, D.; Giuffre, T.; Surdonja, S.; Trubia, S. Introduction of Autonomous Vehicles: Roundabouts Design and Safety Performance Evaluation. Sustainability 2018, 10, 1060. [Google Scholar] [CrossRef] [Green Version]
- Gora, P.; Katrakazas, C.; Drabicki, A.; Islam, F.; Ostaszewski, P. Microscopic traffic simulation models for connected and automated vehicles (CAVs)—State-of-the-art. Procedia Comput. Sci. 2020, 170, 474–481. [Google Scholar] [CrossRef]
- Italian Ministry of Infrastructure and Transport. Functional and Geometric Standards for Road Intersections; Italian Ministry of Infrastructure and Transport: Rome, Italy, 2006.
- Hollander, Y.; Liu, R. The principles of calibrating traffic microsimulation models. Transportation 2008, 35, 347–362. [Google Scholar] [CrossRef]
- Giuffrè, O.; Granà, A.; Tumminello, M.L.; Sferlazza, A. Capacity-based calculation of passenger car equivalents using traffic simulation at double-lane roundabouts. Simul. Model. Pract. Theory 2018, 81, 11–30. [Google Scholar] [CrossRef]
- Gipps, P.G. A Behavioural Car-Following Model for Computer Simulation. Transp. Res. Part B 1981, 15, 105–111. [Google Scholar] [CrossRef]
- Giuffrè, T.; Granà, A.; Trubia, S. Safety evaluation of turbo-roundabouts with and without internal traffic separations considering autonomous vehicles operation. Sustainability 2021, 13, 8810. [Google Scholar] [CrossRef]
- Han, I.; Pham, D.T. Safety analysis of roundabouts and avoidance of conflicts for intersection-advanced driver assistance systems. Cogent Eng. 2022, 9, 2112813. [Google Scholar] [CrossRef]
- Giuffrè, T.; Trubia, S.; Canale, A.; Persaud, B. Using microsimulation to evaluate safety and operational implications of newer roundabout layouts for European road networks. Sustainability 2017, 9, 2084. [Google Scholar] [CrossRef] [Green Version]
- Giuffrè, O.; Granà, A.; Tumminello, M.L.; Giuffrè, T.; Trubia, S. Surrogate Measures of Safety at Roundabouts in AIMSUN and VISSIM Environment. In Roundabouts as Safe and Modern Solutions in Transport Networks and Systems; Macioszek, E., Akçelik, R., Sierpiński, G., Eds.; TSTP 2018. Lecture Notes in Networks and Systems; Springer: Cham, Switzerland, 2019; Volume 52. [Google Scholar] [CrossRef]
- Saleem, T.; Persaud, B.; Shalaby, A.; Ariza, A. Can Microsimulation be used to Estimate Intersection Safety? Transp. Res. Rec. 2018, 2432, 142–148. [Google Scholar] [CrossRef]
- Bulla-Cruz, L.A.; Laureshyn, A.; Lyons, L. Event-based road safety assessment: A novel approach towards risk microsimulation in roundabouts. Measurement 2020, 165, 108192. [Google Scholar] [CrossRef]
- Lo Cigno, R.; Segata, M. Cooperative driving: A comprehensive perspective, the role of communications, and its potential development. Comput. Commun. 2022, 193, 82–93. [Google Scholar] [CrossRef]
- Taiebat, M.; Brown, A.L.; Safford, H.R.; Qu, S.; Xu, M. A Review on Energy, Environmental, and Sustainability Implications of Connected and Automated Vehicles. Environ. Sci. Technol. 2018, 52, 11449–11465. [Google Scholar] [CrossRef] [PubMed]
- Ge, J.I.; Avedisov, S.S.; He, C.R.; Qin, W.B.; Sadeghpour, M.; Orosz, G. Experimental validation of connected automated vehicle design among human-driven vehicles. Transp. Res. Part C Emerg. Technol. 2018, 91, 335–352. [Google Scholar] [CrossRef]
- Stange, V.; Kühn, M.; Vollrath, M. Manual drivers’ experience and driving behaviour in repeated interactions with automated Level 3 vehicles in mixed traffic on the highway. Transp. Res. Part F Traffic Psychol. Behav. 2022, 87, 426–443. [Google Scholar] [CrossRef]
- Kim, B.; Heaslip, K.P. Identifying suitable car-following models to simulate automated vehicles on highways. Int. J. Transp. Sci. Technol. 2023, 12, 652–664. [Google Scholar] [CrossRef]
- Xie, Y.; Gartner, N.H.; Chowdhury, M. Editors’ notes: Special issue on connected and autonomous vehicles. Transp. Res. Part C: Emerg. Technol. 2017, 78, 34–36. [Google Scholar] [CrossRef]
- Vitale, F.; Roncoli, C. Distributed Formation Control for Managing CAV Overtaking and Intersection Maneuvers. IFAC-PapersOnLine 2022, 55, 198–203. [Google Scholar] [CrossRef]
- Long, K.; Gao, Z.; Jiang, Z.; Ma, C.; Hu, J.; Yang, X. Optimization based trajectory planner for multilane roundabouts with connected automation. J. Intell. Transp. Syst. 2022, 27, 411–422. [Google Scholar] [CrossRef]
- Suh, W.; Kim, J.I.; Kim, H.; Ko, J.; Lee, Y.-J. Mathematical Analysis for Roundabout Capacity. Math. Probl. Eng. 2018, 2018, 1–8. [Google Scholar] [CrossRef] [Green Version]
- Boualam, O.; Borsos, A.; Koren, C.; Nagy, V. Impact of autonomous vehicles on roundabout capacity. Sustainability 2022, 14, 2203. [Google Scholar] [CrossRef]
- Ard, T.; Austin Dollar, R.; Vahidi, A.; Zhang, Y.; Karbowski, D. Microsimulation of energy and flow effects from optimal automated driving in mixed traffic. Transp. Res. Part C Emerg. Technol. 2020, 120, 102806. [Google Scholar] [CrossRef]
- Mauro, R.; Cattani, M.; Guerrieri, M. Evaluation of the safety performance of turbo roundabouts by means of a potential accident rate model. Balt. J. Road Bridge Eng. 2015, 10, 28–38. [Google Scholar] [CrossRef] [Green Version]
- Tollazzi, T.; Rencelj, M. Comparative Analyse of The Two New Alternative Types of Roundabouts—Turbo and Flower Roundabout. Balt. J. Road Bridge Eng. 2014, 9, 164–170. [Google Scholar] [CrossRef]
- Guerrieri, M. A theoretical model for evaluating the impact of Connected and Autonomous Vehicles on the operational performance of turbo roundabouts. Int. J. Transp. Sci. Technol. 2023. [Google Scholar] [CrossRef]



| CAV Penetration Rate (%) | ||||||
|---|---|---|---|---|---|---|
| Entry Capacity (pc/h) | 0 | 20 | 40 | 60 | 80 | 100 |
| μ1 1 (s.e.) 2 | 832.55 (65.62) | 869.22 (67.20) | 988.88 (66.88) | 1055.11 (68.43) | 1089.33(71.09) | 1149.00 (75.51) |
| μ2 1 (s.e.) 2 | 787.13 (56.07) | 847.1 (57.63) | 922.10 (60.95) | 1020.18 (63.49) | 1084.92 (66.95) | 1161.48 (68.62) |
| 95% c.i. 3 | (−126.7; 217.6) | (−154.4; 198.7) | (−113.7; 247.3) | (−151.3; 221.1) | (−190.4; 199.2) | (−216.0; 191.0) |
| t-value 4 | 0.53 | 0.25 | 0.73 | 0.37 | 0.05 | −0.12 |
| t-critical value 5 | 1.995 | 1.995 | 1.994 | 1.666 | 1.994 | 1.995 |
| p(α)-value 6 | 0.60 | 0.80 | 0.50 | 0.71 | 0.96 | 0.90 |
| F-value 7 | 1.37 | 1.36 | 1.20 | 1.16 | 1.13 | 1.21 |
| F-critical value 8 | 1.757 | 1.757 | 1.757 | 1.757 | 1.757 | 1.757 |
| F-prob 9 | 0.36 | 0.35 | 0.59 | 0.66 | 0.72 | 0.57 |
| 0.09 | 0.07 | 0.08 | 0.05 | 0.033 | 0.047 | |
| 0.034 | 0.002 | 0.07 | 0.03 | −0.002 | −0.023 | |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Tumminello, M.L.; Macioszek, E.; Granà, A.; Giuffrè, T. A Methodological Framework to Assess Road Infrastructure Safety and Performance Efficiency in the Transition toward Cooperative Driving. Sustainability 2023, 15, 9345. https://doi.org/10.3390/su15129345
Tumminello ML, Macioszek E, Granà A, Giuffrè T. A Methodological Framework to Assess Road Infrastructure Safety and Performance Efficiency in the Transition toward Cooperative Driving. Sustainability. 2023; 15(12):9345. https://doi.org/10.3390/su15129345
Chicago/Turabian StyleTumminello, Maria Luisa, Elżbieta Macioszek, Anna Granà, and Tullio Giuffrè. 2023. "A Methodological Framework to Assess Road Infrastructure Safety and Performance Efficiency in the Transition toward Cooperative Driving" Sustainability 15, no. 12: 9345. https://doi.org/10.3390/su15129345