
Design, Modeling, and Model-Free Control of Permanent Magnet-Assisted Synchronous Reluctance Motor for e-Vehicle Applications

 ,
,  ,
,  , and
, and 
Abstract
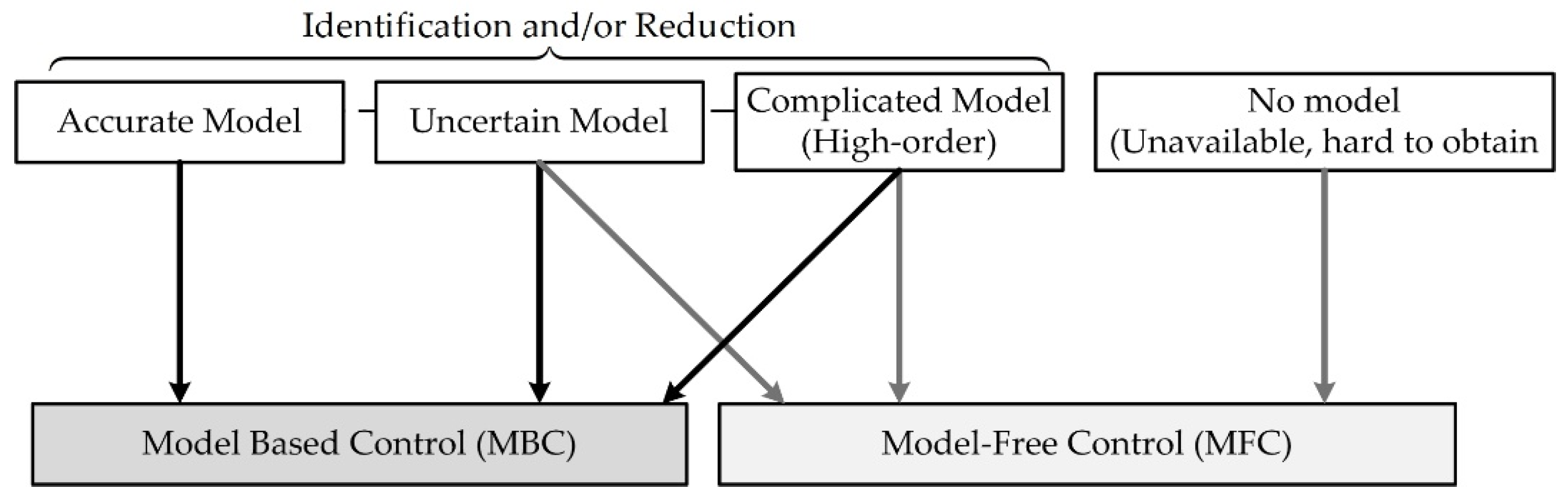
:1. Introduction
2. Model-Free Control and Control Law (Brief Introduction)
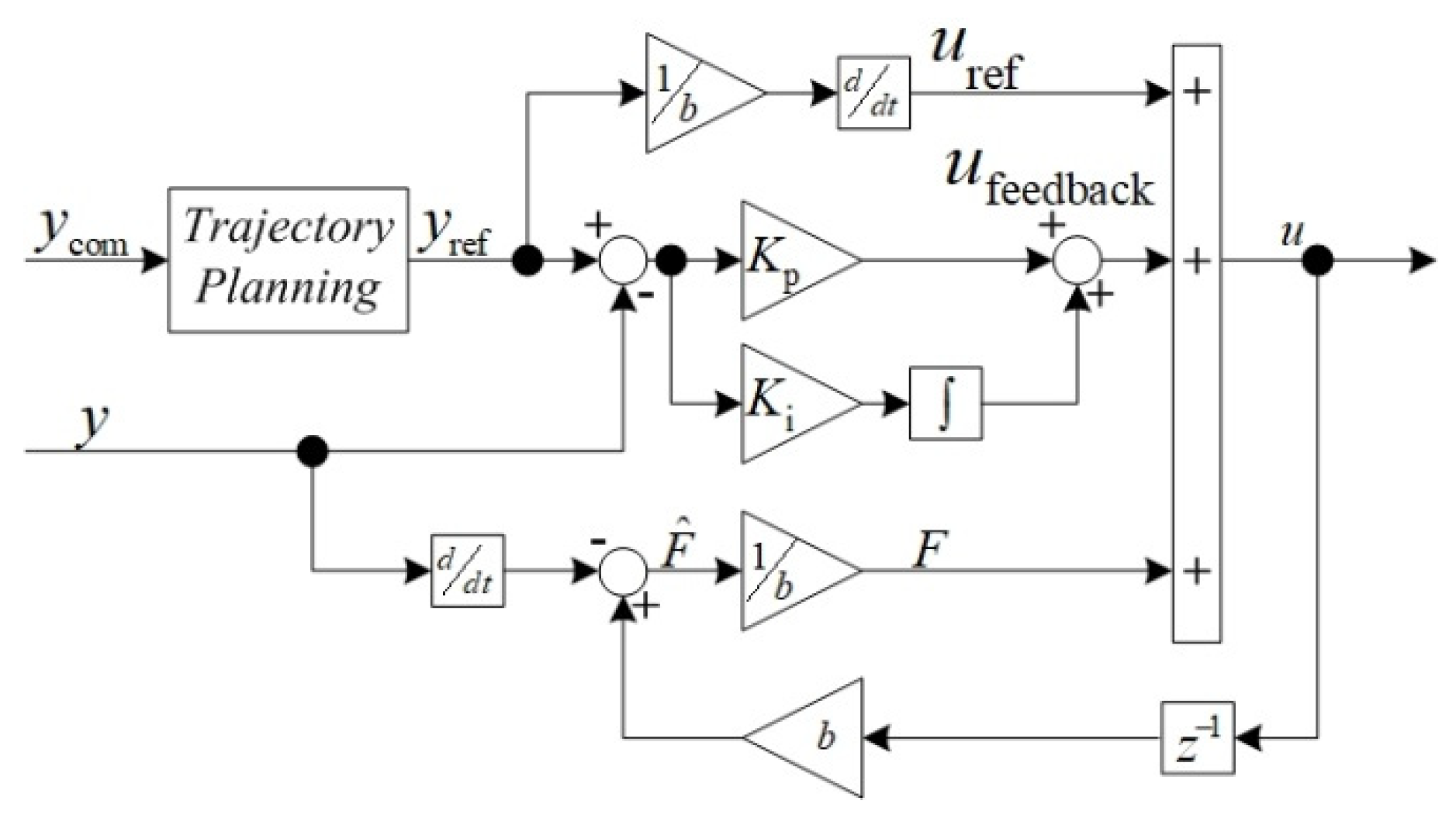
2.1. Model-Free Control
2.2. Control Law
2.3. Controller Design
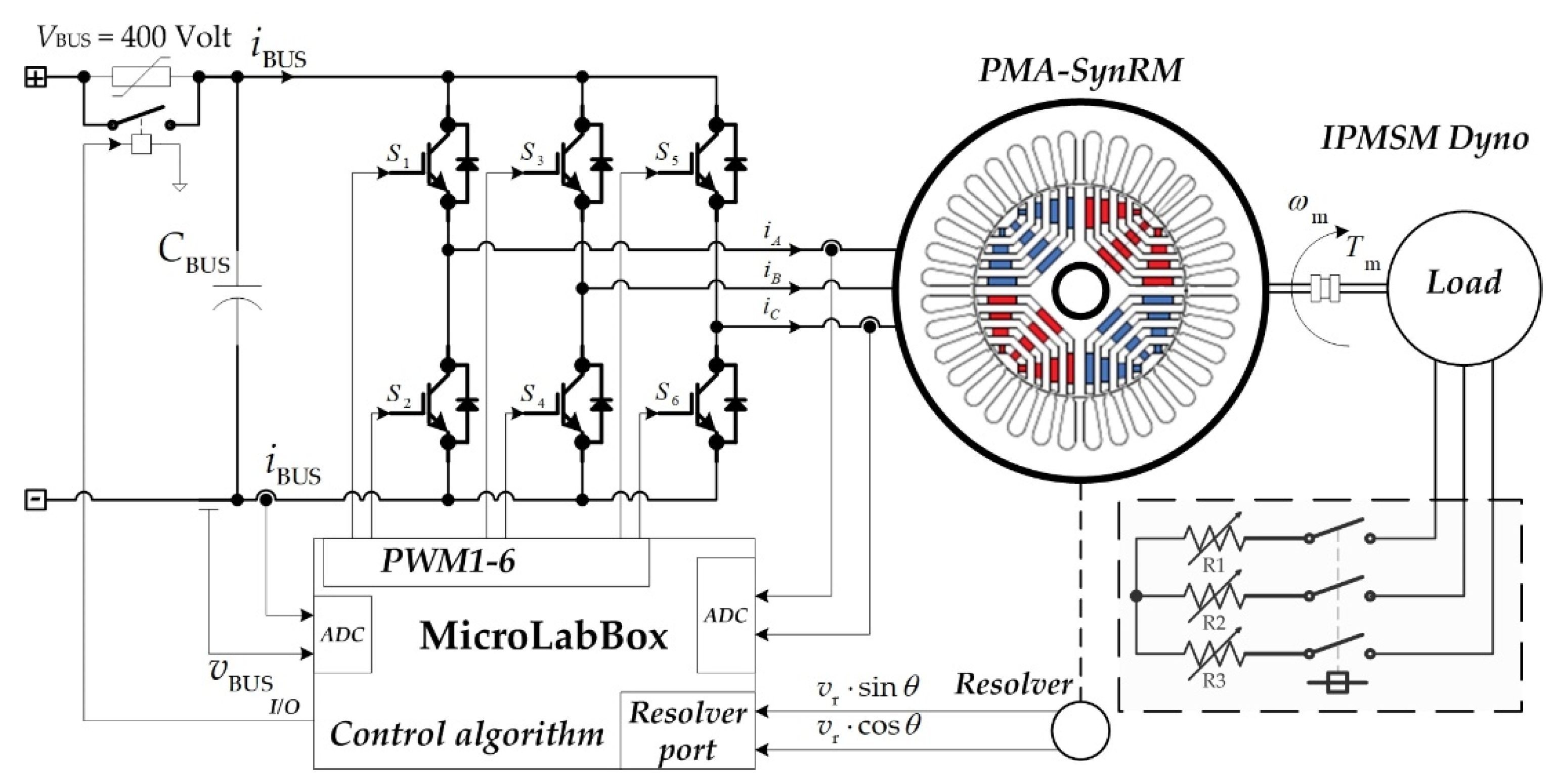
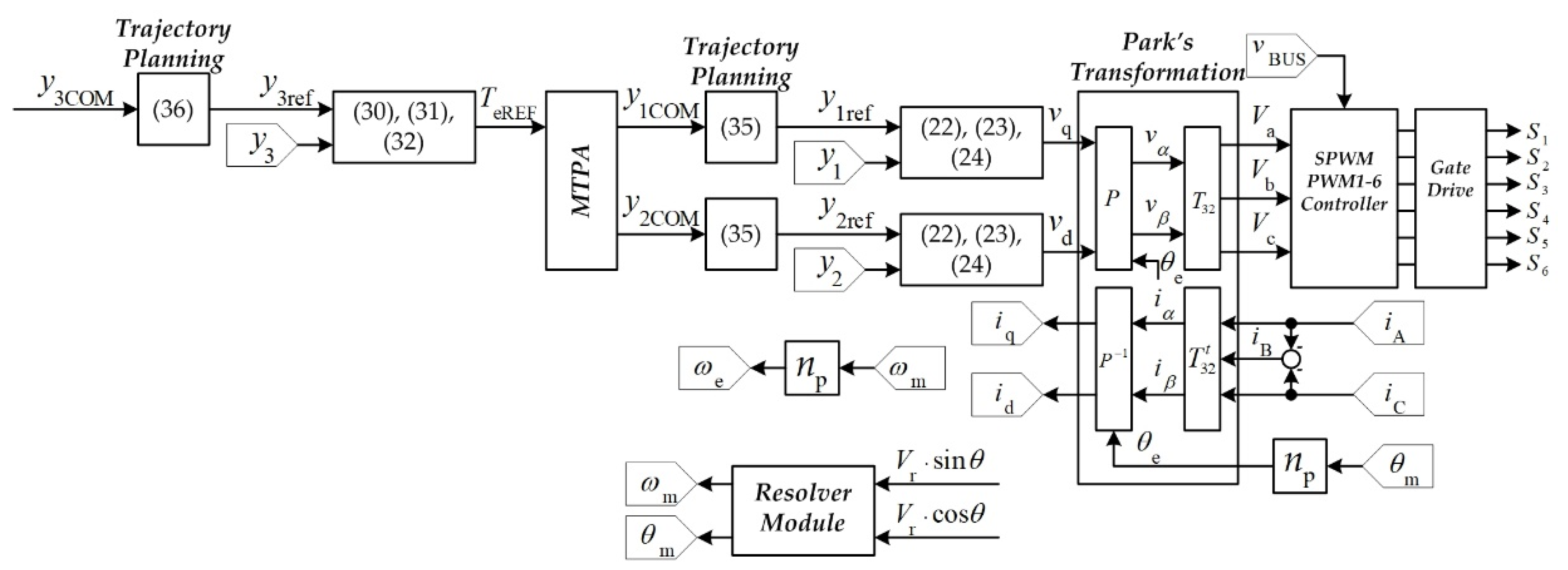
3. Applying Model-Free Control to PMa-SynRM Drive
3.1. Mathematic Model of PMa-SynRM/Inverter
3.2. Model-Free of Current and Speed Control Development
3.3. Trajectory Planning
4. Simulation and Experimental Validation of the Model-Free Control Applied to PMa-SynRM
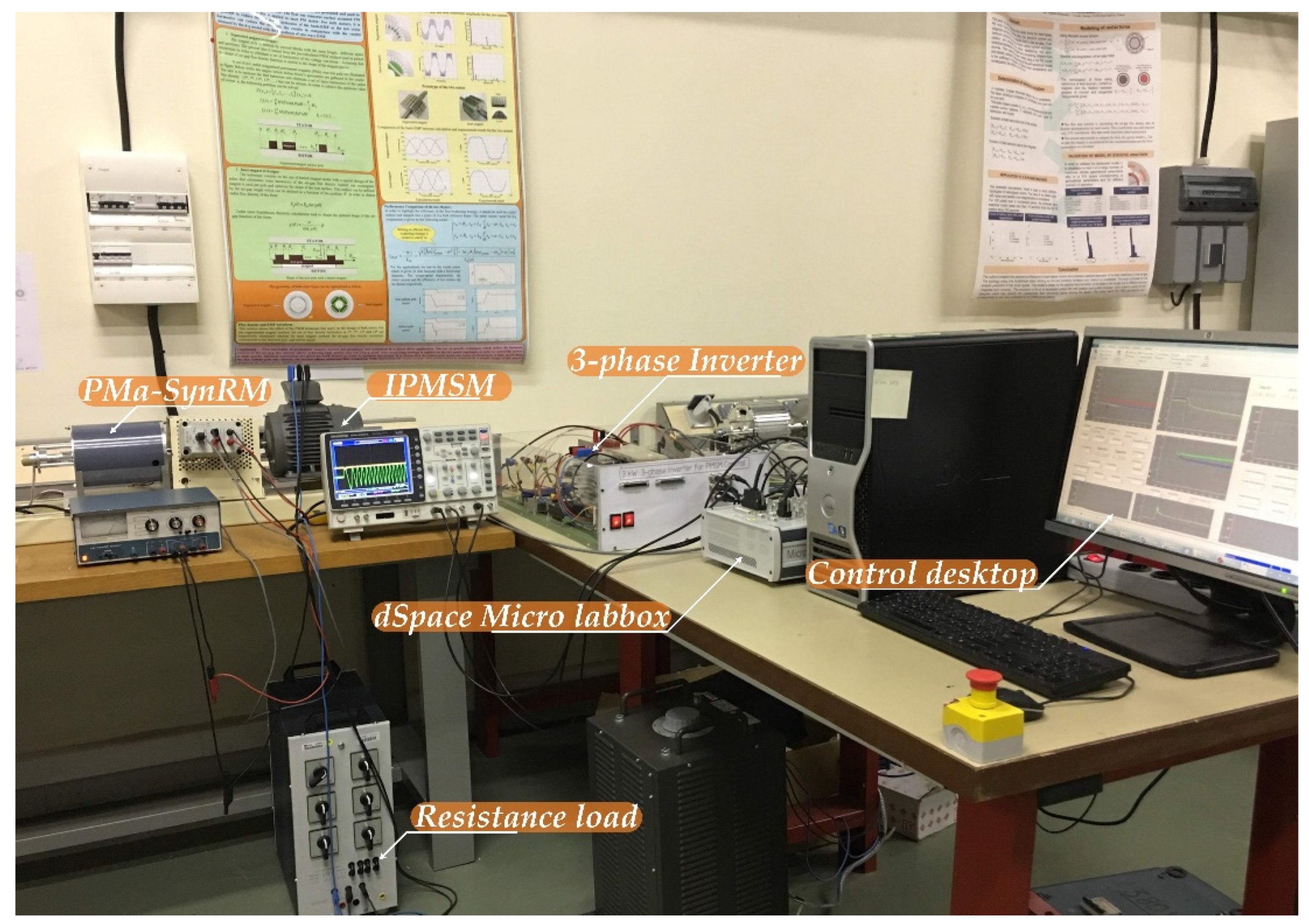
4.1. Experimental Setup
4.2. Simulations
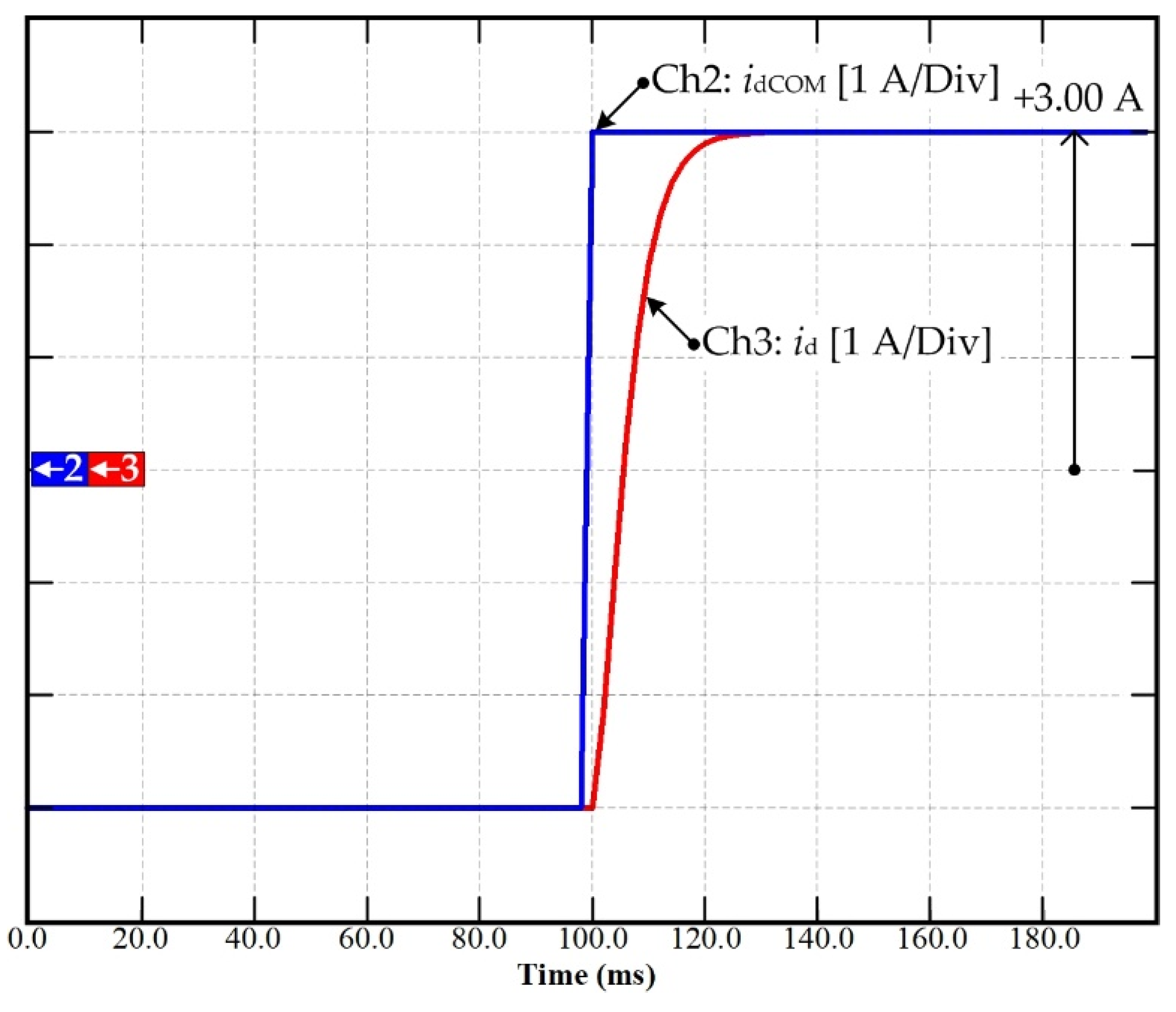
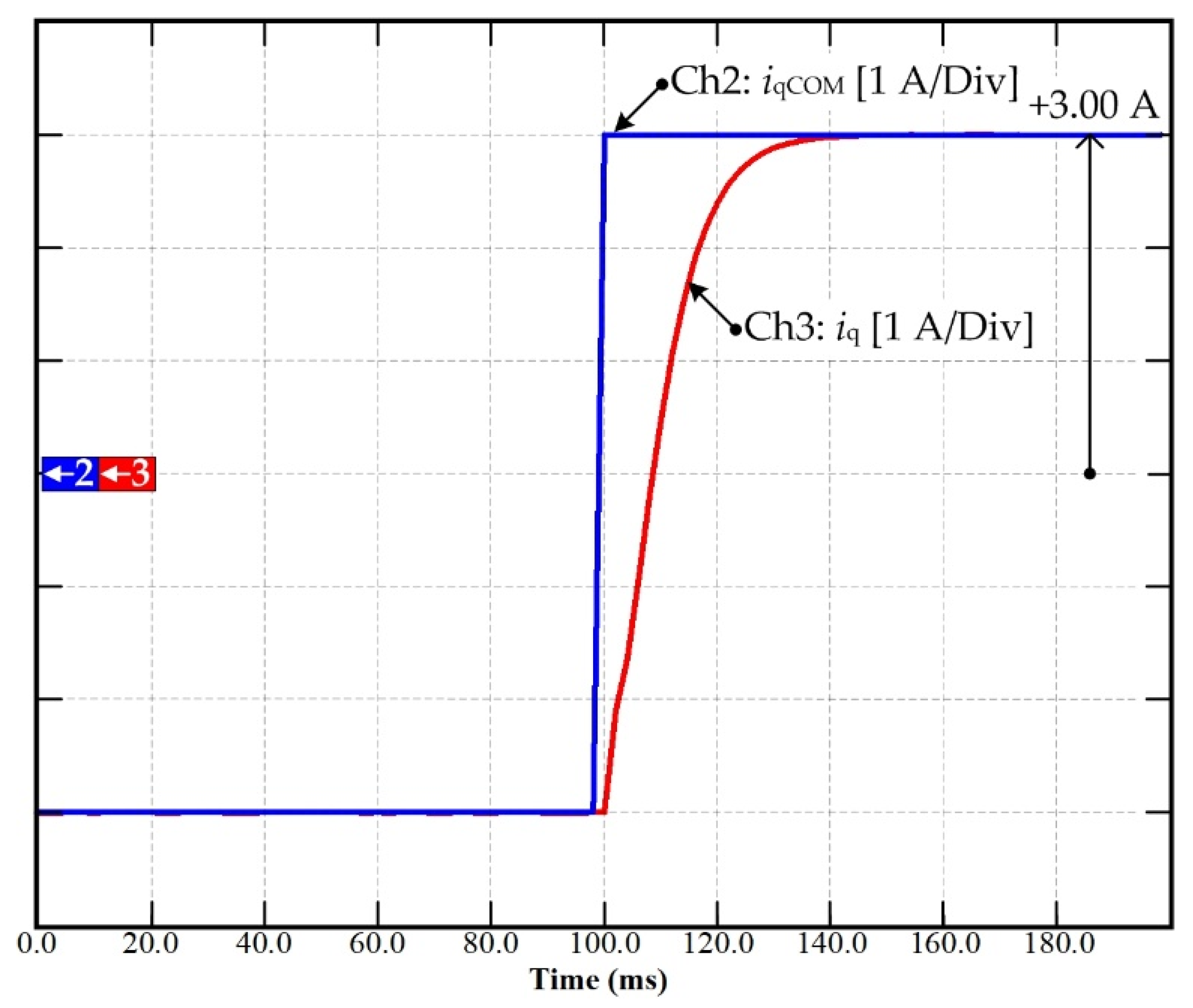
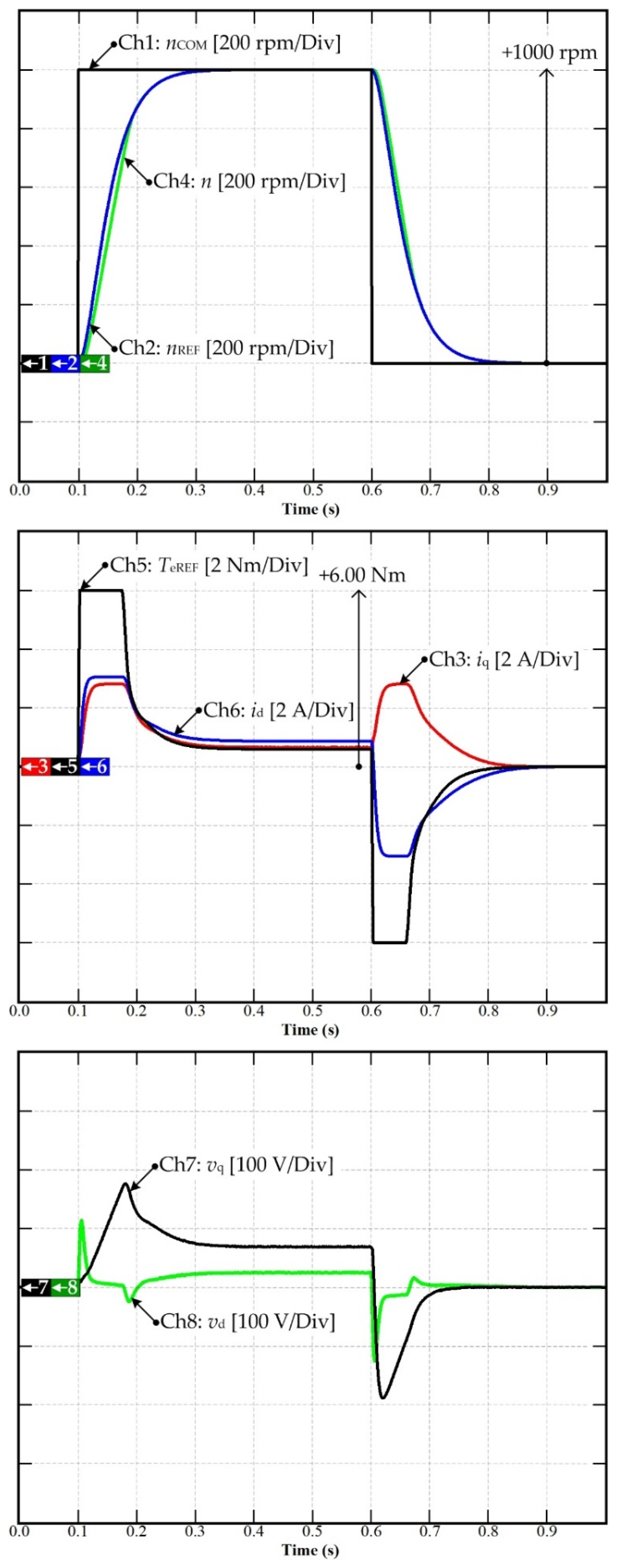
4.3. Experimental Validation of PMa-SynRM Drive Based on Model-Free Control
5. Comparison of Traditional FOC with PI Controller, MBC, and Model-Free Control
6. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Sadeghi, Z.; Shahparasti, M.; Rajaei, A.; Laaksonen, H. Three-Level Reduced Switch AC/DC/AC Power Conversion System for High Voltage Electric Vehicles. Sustainability 2022, 14, 1620. [Google Scholar] [CrossRef]
- Krings, A.; Monissen, C. Review and Trends in Electric Traction Motors for Battery Electric and Hybrid Vehicles. In Proceedings of the 2020 International Conference on Electrical Machines (ICEM), Gothenburg, Sweden, 23–26 August 2020. [Google Scholar] [CrossRef]
- Husain, I.; Ozpineci, B.; Islam, M.; Gurpinar, E.; Su, G.; Yu, W.; Chowdhury, S.; Xue, L.; Rahman, D.; Sahu, R. Electric Drive Technology Trends, Challenges, and Opportunities for Future Electric Vehicles. Proc. IEEE 2021, 109, 1039–1059. [Google Scholar] [CrossRef]
- Lukic, M.; Giangrande, P.; Hebala, A.; Nuzzo, S.; Galea, M. Review, Challenges, and Future Developments of Electric Taxiing Systems. IEEE Trans. Transp. Electrif. 2019, 5, 1441–1457. [Google Scholar] [CrossRef]
- Rahrovi, B.; Ehsani, M. A Review of the More Electric Aircraft Power Electronics. In Proceedings of the 2019 IEEE Texas Power and Energy Conference (TPEC), College Station, TX, USA, 7–8 February 2019. [Google Scholar] [CrossRef]
- Noland, J.K.; Leandro, M.; Suul, J.A.; Molinas, M. High-Power Machines and Starter-Generator Topologies for More Electric Aircraft: A Technology Outlook. IEEE Access 2020, 8, 130104–130123. [Google Scholar] [CrossRef]
- Tang, M.; Bifaretti, S.; Pipolo, S.; Formentini, A.; Odhano, S.; Zanchetta, P. A Novel Low Computational Burden Dual-Observer Phase-Locked Loop with Strong Disturbance Rejection Capability for More Electric Aircraft. IEEE Trans. Ind. Appl. 2021, 57, 3832–3841. [Google Scholar] [CrossRef]
- Ooi, S.; Morimoto, S.; Sanada, M.; Inoue, Y. Performance Evaluation of a High-Power-Density PMASynRM with Ferrite Magnets. IEEE Trans. Ind. Appl. 2013, 49, 1308–1315. [Google Scholar] [CrossRef]
- Trancho, E.; Ibarra, E.; Arias, A.; Kortabarria, I.; Jurrgens, J.; Marengo, L.; Fricasse, A.; Gragger, J.V. PM-Assisted Synchronous Reluctance Machine Flux Weakening Control for EV and HEV Applications. IEEE Trans. Ind. Electron. 2017, 65, 2986–2995. [Google Scholar] [CrossRef] [Green Version]
- Capecchi, E.; Guglielmi, P.; Pastorelli, M.; Vagati, A. Position-sensorless control of the transverse-laminated synchronous reluctance motor. IEEE Trans. Ind. Appl. 2001, 37, 1768–1776. [Google Scholar] [CrossRef]
- Niazi, P. Permanent Magnet Assisted Synchronous Reluctance Motor Design and Performance Improvement. Ph.D. Thesis, Texas A & M University, College Station, TX, USA, 2005. [Google Scholar]
- Joo, K.; Kim, I.; Lee, J.; Go, S. Robust Speed Sensorless Control to Estimated Error for PMa-SynRM. IEEE Trans. Magn. 2017, 53, 1–4. [Google Scholar] [CrossRef]
- Sriprang, S.; Poonnoy, N.; Guilbert, D.; Nahid-Mobarakeh, B.; Takorabet, N.; Bizon, N.; Thounthong, P. Design, Modeling, and Differential Flatness Based Control of Permanent Magnet-Assisted Synchronous Reluctance Motor for e-Vehicle Applications. Sustainability 2021, 13, 9502. [Google Scholar] [CrossRef]
- Wang, Y.; Li, H.; Liu, R.; Yang, L.; Wang, X. Modulated Model-Free Predictive Control with Minimum Switching Losses for PMSM Drive System. IEEE Access 2020, 8, 20942–20953. [Google Scholar] [CrossRef]
- Lin, C.-K.; Agustin, C.A.; Yu, J.-T.; Cheng, Y.-S.; Chen, F.-M.; Lai, Y.-S. A Modulated Model-Free Predictive Current Control for Four-Switch Three-Phase Inverter-Fed SynRM Drive Systems. IEEE Access 2021, 9, 162984–162995. [Google Scholar] [CrossRef]
- Lyu, Z.; Wu, X.; Gao, J.; Tan, G. An Improved Finite-Control-Set Model Predictive Current Control for IPMSM under Model Parameter Mismatches. Energies 2021, 14, 6342. [Google Scholar] [CrossRef]
- Hashjin, S.A.; Pang, S.; Miliani, E.-H.; Ait-Abderrahim, K.; Nahid-Mobarakeh, B. Data-Driven Model-Free Adaptive Current Control of a Wound Rotor Synchronous Machine Drive System. IEEE Trans. Transp. Electrif. 2020, 6, 1146–1156. [Google Scholar] [CrossRef]
- Precup, R.-E.; Radac, M.-B.; Roman, R.-C.; Petriu, E.M. Model-free sliding mode control of nonlinear systems: Algorithms and experiments. Inf. Sci. 2017, 381, 176–192. [Google Scholar] [CrossRef]
- Sriprang, S.; Nahid-Mobarakeh, B.; Takorabet, N.; Pierfederici, S.; Mungporn, P.; Thounthong, P.; Bizon, N.; Kuman, P.; Shah, Z. Model Free-Based Torque Control of Permanent Magnet Synchronous Motor Drives. In Proceedings of the 2019 Research, Invention, and Innovation Congress (RI2C), Bangkok, Thailand, 11–13 December 2019. [Google Scholar] [CrossRef]
- Fliess, M.; Join, C. Model-free control. Int. J. Control 2013, 86, 2228–2252. [Google Scholar] [CrossRef] [Green Version]
- Fliess, M.; Join, C. Stability margins and model-free control: A first look. In Proceedings of the 2014 European Control Conference (ECC), Strasbourg, France, 24–27 June 2014. [Google Scholar] [CrossRef] [Green Version]
- Battiston, A.; Miliani, E.-H.; Martin, J.-P.; Nahid-Mobarakeh, B.; Pierfederici, S.; Meibody-Tabar, F. A Control Strategy for Electric Traction Systems Using a PM-Motor Fed by a Bidirectional $Z$-Source Inverter. IEEE Trans. Veh. Technol. 2014, 63, 4178–4191. [Google Scholar] [CrossRef]
- Thounthong, P.; Sikkabut, S.; Poonnoy, N.; Mungporn, P.; Yodwong, B.; Kumam, P.; Bizon, N.; Pierfederici, S.; Poonnoi, N.; Nahidmobarakeh, B. Nonlinear Differential Flatness-Based Speed/Torque Control with State-Observers of Permanent Magnet Synchronous Motor Drives. IEEE Trans. Ind. Appl. 2018, 54, 2874–2884. [Google Scholar] [CrossRef]
- Fliess, M.; Sira–Ramírez, H. An algebraic framework for linear identification. ESAIM Control Optim. Calc. Var. 2003, 9, 151–168. [Google Scholar] [CrossRef]
- Fliess, M.; Sira-Ramírez, H. Closed-loop Parametric Identification for Continuous-time Linear Systems via New Algebraic Techniques. In Identification of Continuous-Time Models from Sampled Data; Part of the Advances in Industrial Control Book Series (AIC); Springer: London, UK, 2008; pp. 363–391. [Google Scholar] [CrossRef]
- Sriprang, S.; Nahid-Mobarakeh, B.; Takorabet, N.; Pierfederici, S.; Kumam, P.; Bizon, N.; Taghavi, N.; Vahedi, A.; Mungporn, P.; Thounthong, P. Design and control of permanent magnet assisted synchronous reluctance motor with copper loss minimization using MTPA. J. Electr. Eng. 2020, 71, 11–19. [Google Scholar] [CrossRef]
















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Symbol | Quantity | Value |
|---|---|---|
| Prated | Rated power | 1 kW |
| nrated | Rated speed | 1350 rpm |
| Trated | Rated torque | 7.07 Nm |
| np | Number of pole pairs | 2 |
| P.F. | Power factor | 0.80 |
| Rs | Resistance (motor + inverter) | 3.2 Ω |
| Ld | Nominal d-axis inductance | 288 mH |
| Lq | Nominal q-axis inductance | 38 mH |
| J | Equivalent inertia | 0.017 kg m2 |
| Bf | Viscous friction coefficient | 0.008 Nm s/rad |
| Ψm | PMs flux linkage | 0.138 Wb |
| fs | Switching frequency | 16 kHz |
| Vdc | DC bus voltage | 400 V |
| Symbol | Quantity | Value |
|---|---|---|
| ζ1d | Damping ratio 1 | 0.7 |
| ωn1d | Natural frequency 1 | 3000 Rad s−1 |
| ζ1q | Damping ratio 1 | 0.7 pu. |
| ωn1q | Natural frequency 1 | 2000 Rad s−1 |
| ζ2 | Damping ratio 2 | 0.7 |
| ωn2 | Natural frequency 2 | 107.1419 Rad s−1 |
| ζ3d | Damping ratio 3 | 1 |
| ωn3d | Natural frequency 3 | 300 Rad s−1 |
| ζ3q | Damping ratio 3 | 1 |
| ωn3q | Natural frequency 3 | 200 Rad s−1 |
| ζ4 | Damping ratio 4 | 1 |
| ωn4 | Natural frequency 4 | 150 Rad s−1 |
| Temax | Maximum torque reference | +6 Nm |
| Temin | Minimum torque reference | −6 Nm |
| Vdc | DC bus voltage | 400 V |
| fs | Switching frequency | 16 kHz |
| FOC + PI Controller | Differential Flatness-Based Control | Model-Free Control |
|---|---|---|
|
|
|
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Sriprang, S.; Poonnoy, N.; Nahid-Mobarakeh, B.; Takorabet, N.; Bizon, N.; Mungporn, P.; Thounthong, P. Design, Modeling, and Model-Free Control of Permanent Magnet-Assisted Synchronous Reluctance Motor for e-Vehicle Applications. Sustainability 2022, 14, 5423. https://doi.org/10.3390/su14095423
Sriprang S, Poonnoy N, Nahid-Mobarakeh B, Takorabet N, Bizon N, Mungporn P, Thounthong P. Design, Modeling, and Model-Free Control of Permanent Magnet-Assisted Synchronous Reluctance Motor for e-Vehicle Applications. Sustainability. 2022; 14(9):5423. https://doi.org/10.3390/su14095423
Chicago/Turabian StyleSriprang, Songklod, Nitchamon Poonnoy, Babak Nahid-Mobarakeh, Noureddine Takorabet, Nicu Bizon, Pongsiri Mungporn, and Phatiphat Thounthong. 2022. "Design, Modeling, and Model-Free Control of Permanent Magnet-Assisted Synchronous Reluctance Motor for e-Vehicle Applications" Sustainability 14, no. 9: 5423. https://doi.org/10.3390/su14095423