
Analysis of a Hybrid Wind/Photovoltaic Energy System Controlled by Brain Emotional Learning-Based Intelligent Controller


Abstract
:1. Introduction
- Investigating simple energy and power analysis of the system. Hence, power and energy closed-form relations are derived. Also, equations for the size of the ESS are generated.
- Designing the wind/PV microgrid for the BELBIC controller and other controllers.
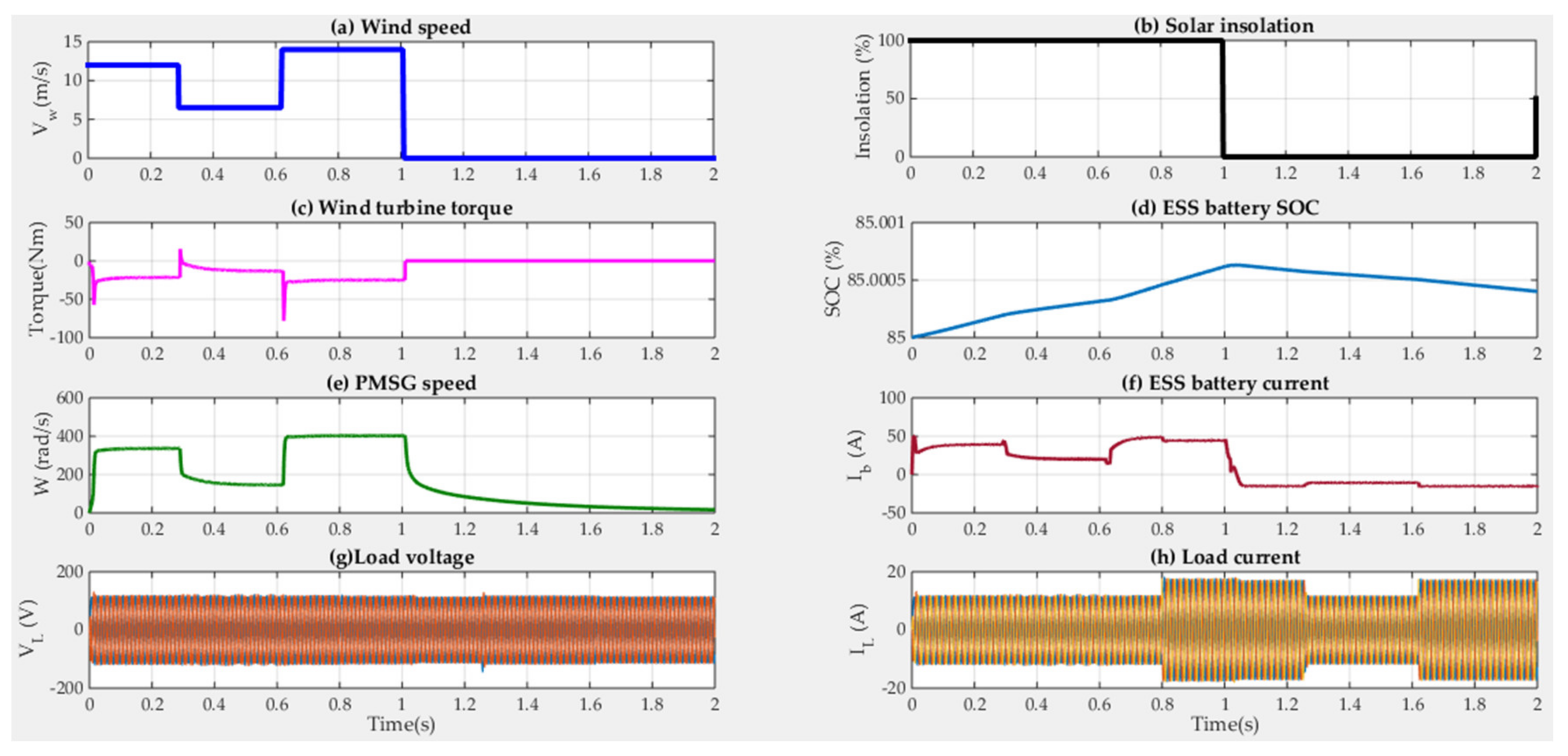
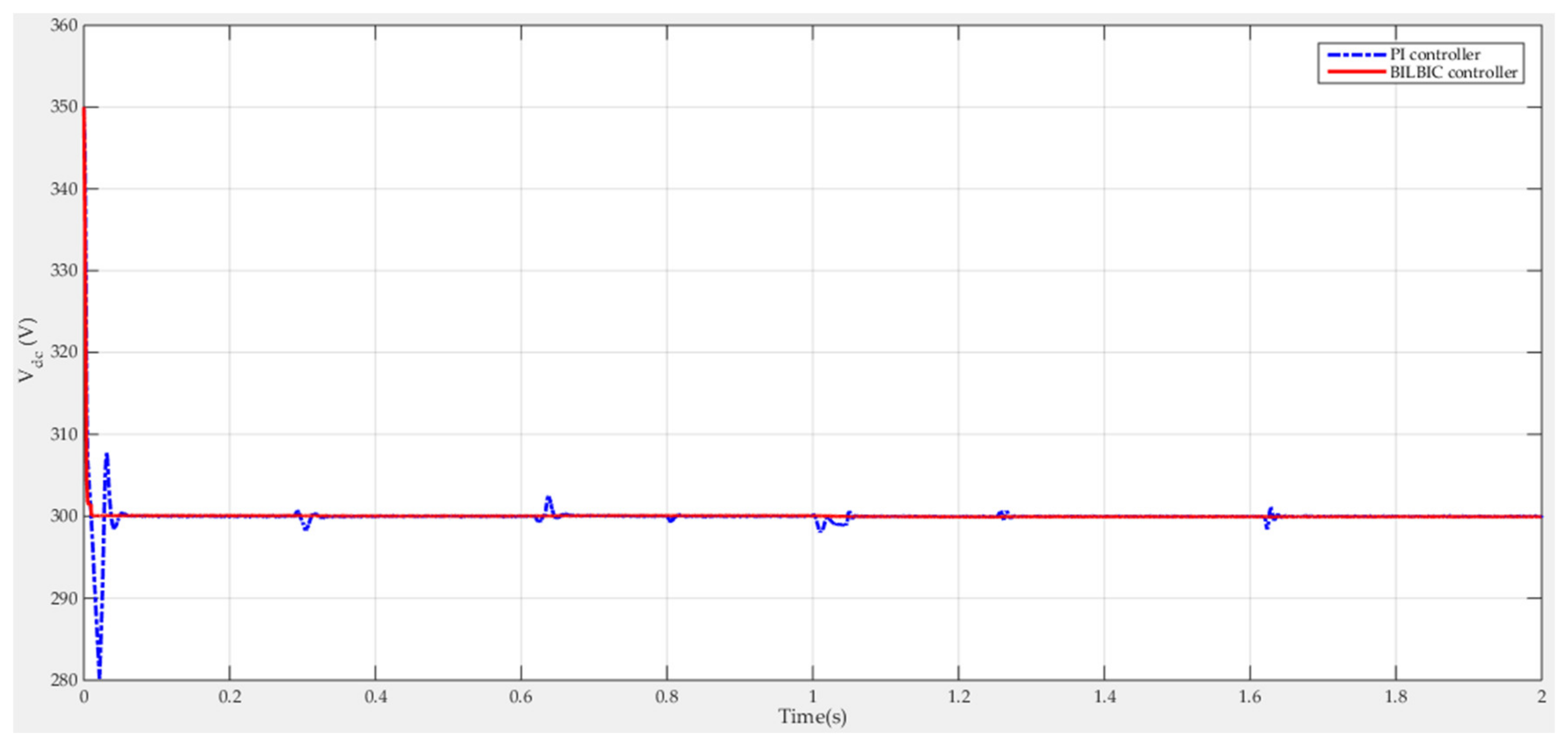
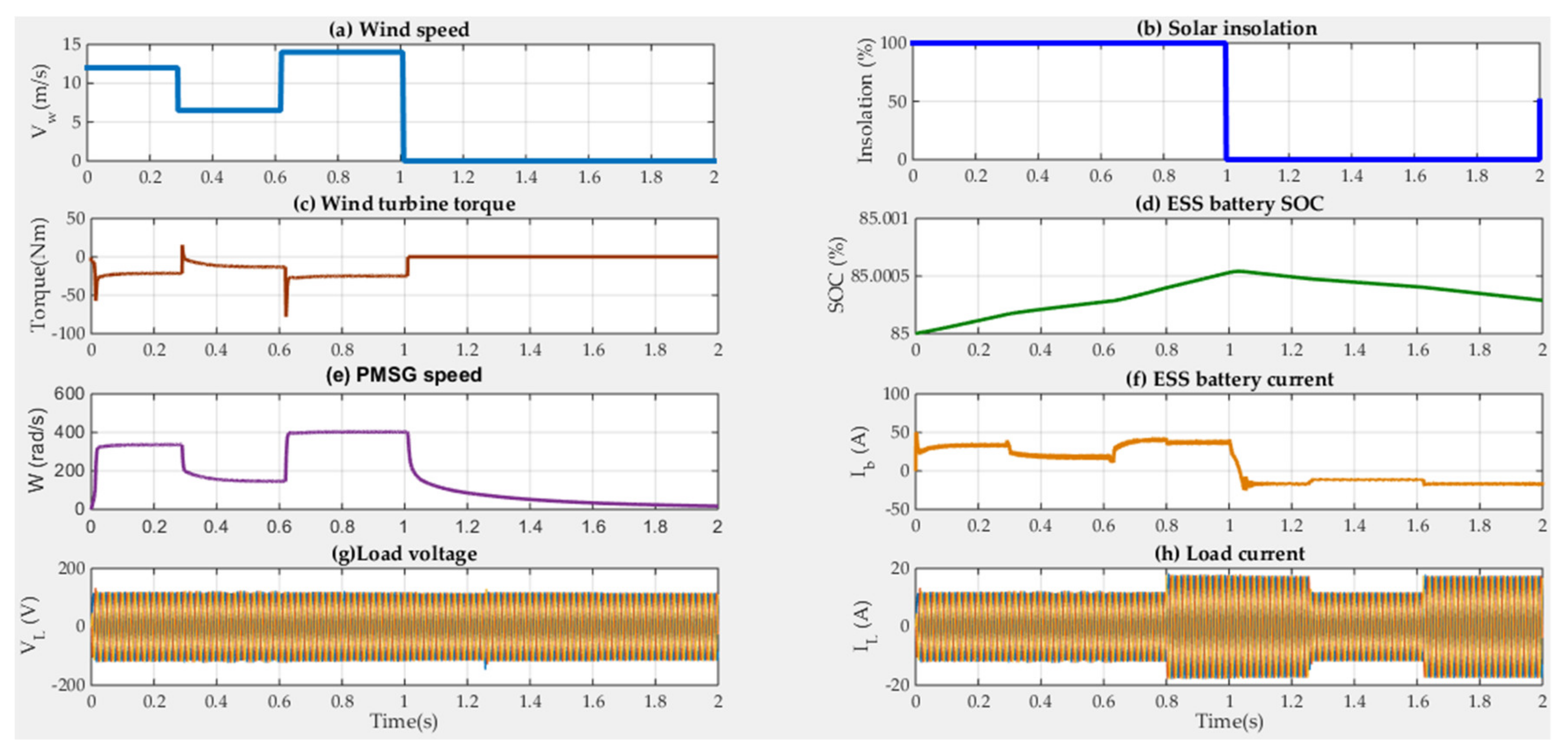
- Simulating and implementing the proposed system in the MATLAB platform. Then, the system performance is tested under step and ramp changes in the system load, wind speed, and solar radiation. Moreover, the system stability against model parameter uncertainties and variations in the microgrid parameters are discussed.
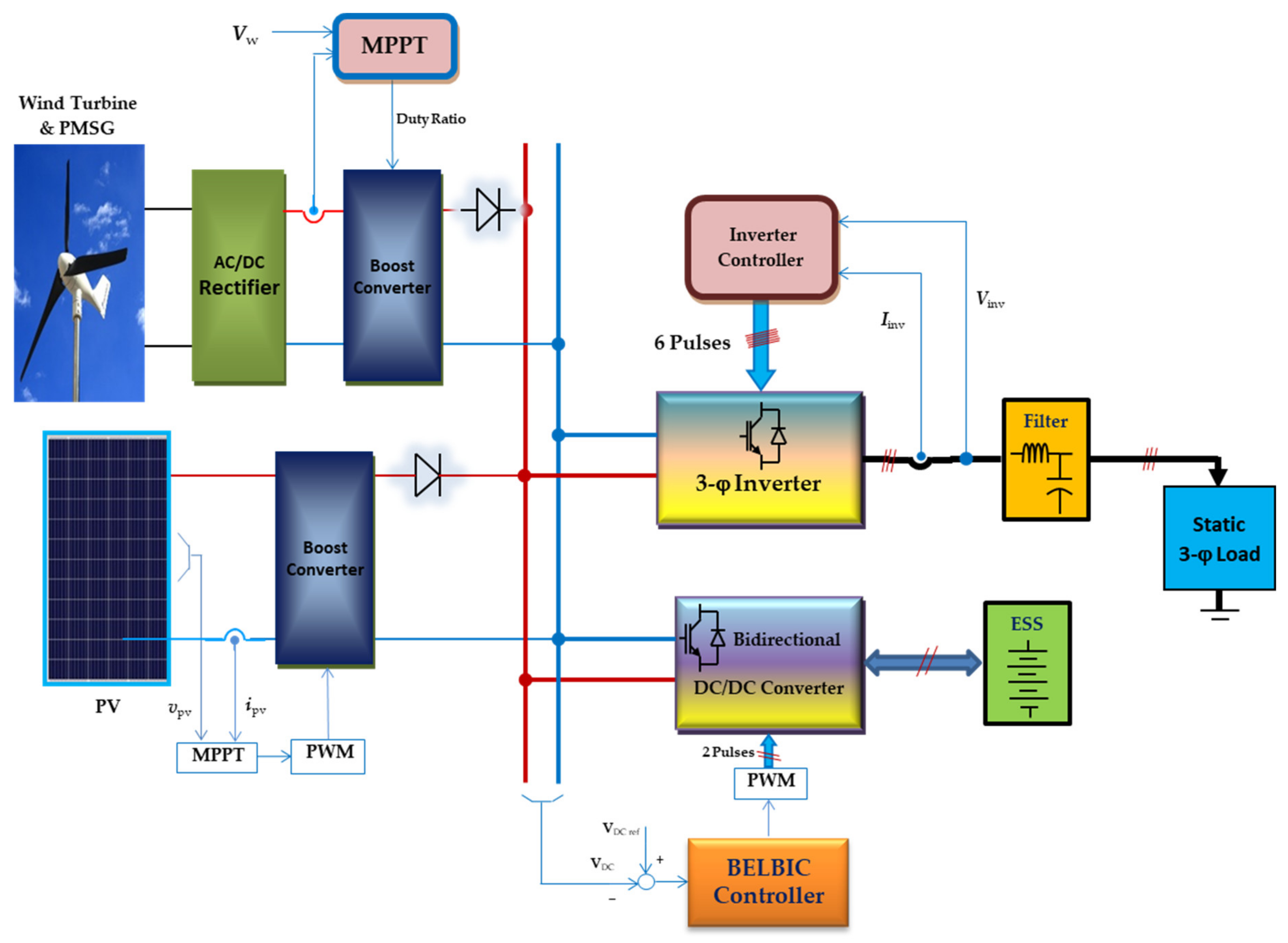
2. Explanation of the Proposed Microgrid
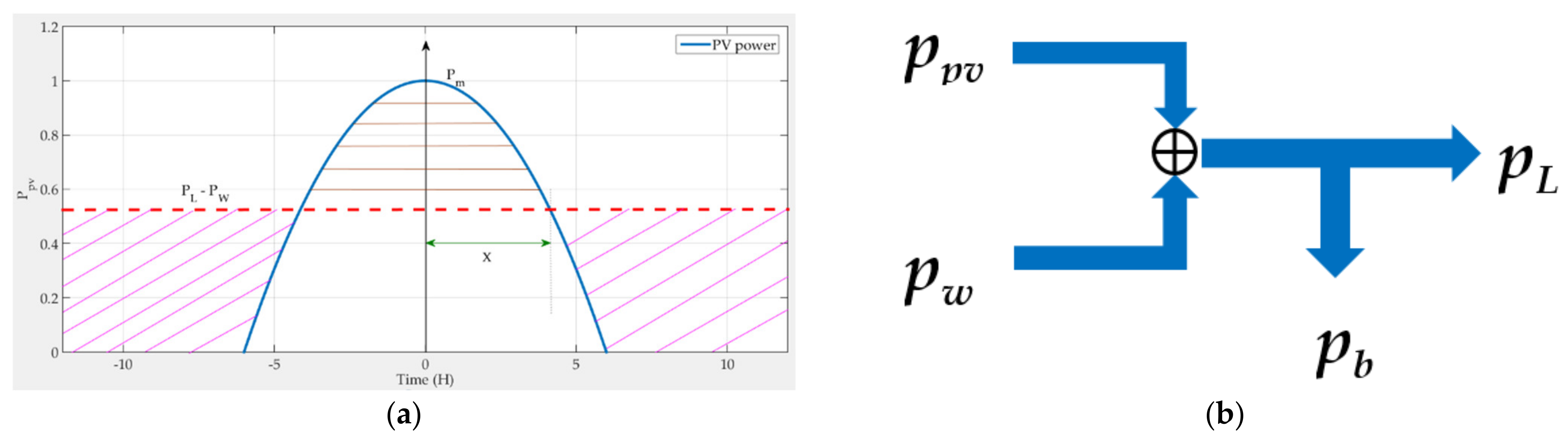
3. Power Analysis of the Proposed Wind/PV Microgrid
3.1. Average Wind Power
3.2. Average Solar Power
3.3. Energy Analysis of the ESS
4. The Control System Design
4.1. The Wind and PV Array MPPT Controllers
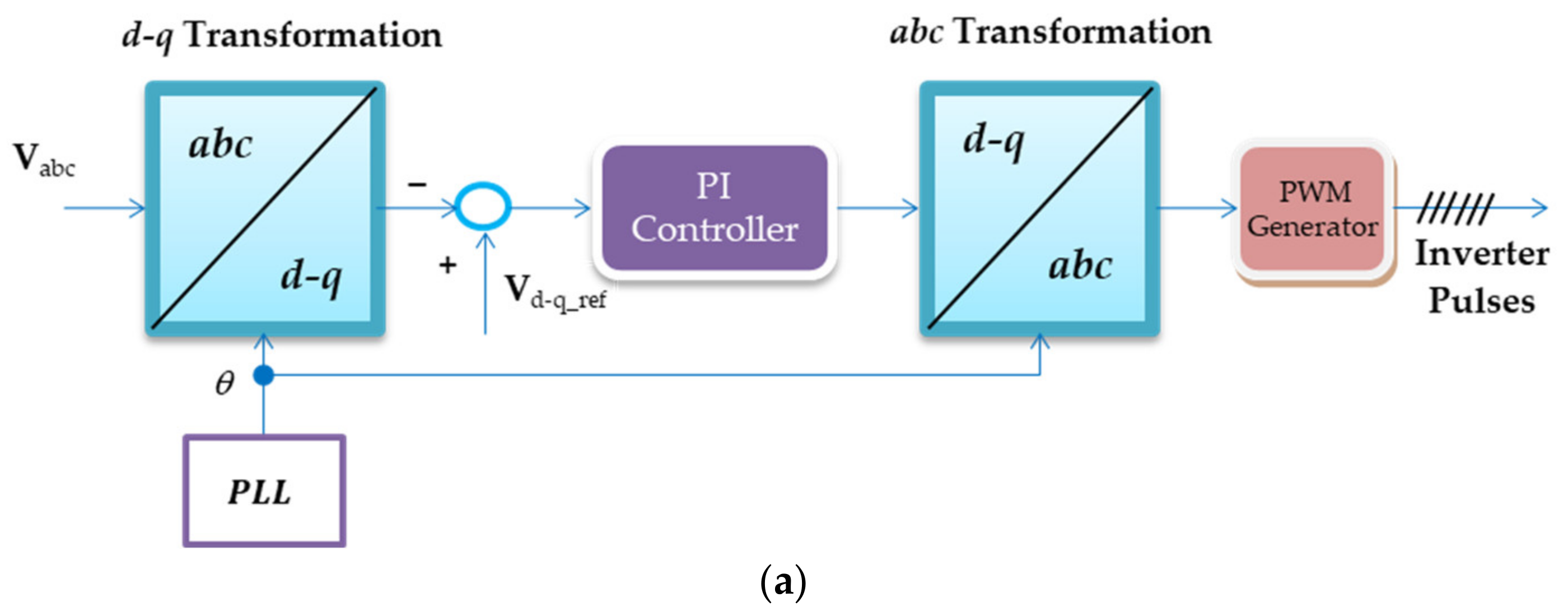
4.2. Load Inverter Controller
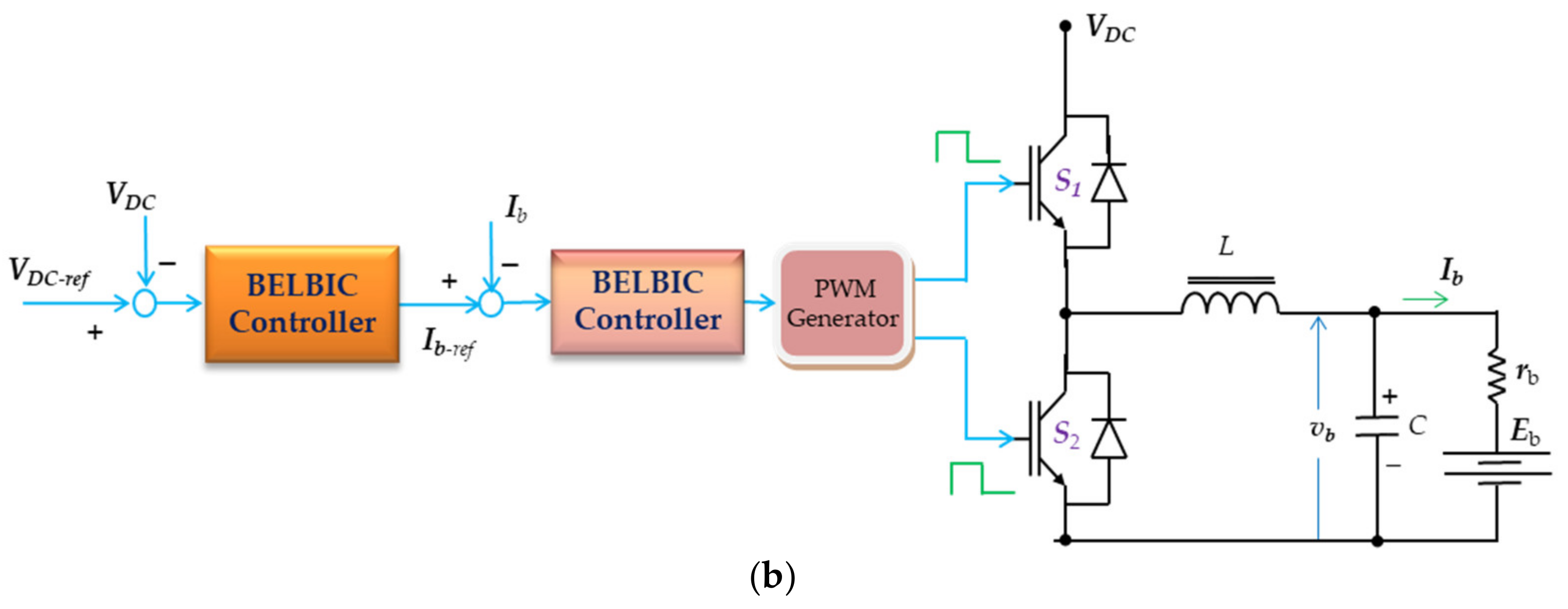
4.3. Storage and DC-Link Voltage Controller
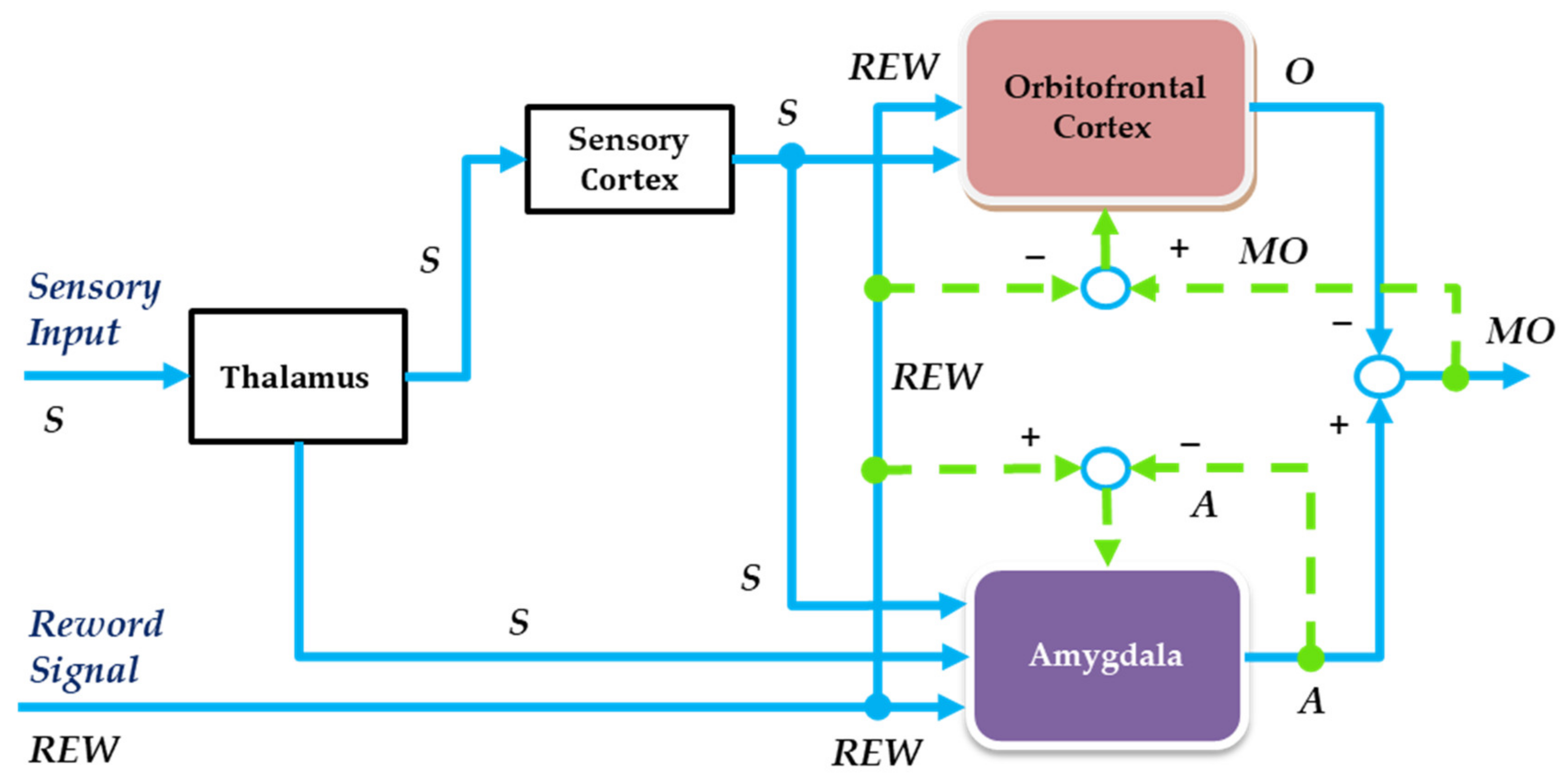
5. The BELBIC Controller Design
6. The Simulation Results
7. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Yimen, N.; Tchotang, T.; Kanmogne, A.; Idriss, I.A.; Musa, B.; Aliyu, A.; Okonkwo, E.C.; Abba, S.I.; Tata, D.; Meva’a, L.; et al. Optimal sizing and techno-economic analysis of hybrid renewable energy systems—A case study of a photovoltaic/wind/battery/diesel system in Fanisau, Northern Nigeria. Processes 2020, 8, 1381. [Google Scholar] [CrossRef]
- Miller, I.; Gençer, E.; O’Sullivan, F.M. A general model for estimating emissions from integrated power generation and energy storage. case study: Integration of solar photovoltaic power and wind power with batteries. Processes 2018, 6, 267. [Google Scholar] [CrossRef] [Green Version]
- Nabipour-Afrouzi, H.; Wen Yii, S.H.; Ahmad, J.; Tabassum, M. Comprehensive Review on Appropriate Sizing and Optimization Technique of Hybrid PV-Wind System. In Proceedings of the 2018 IEEE PES Asia-Pacific Power and Energy Engineering Conference (APPEEC), Kota Kinabalu, Malaysia, 7–10 April 2018; pp. 364–369. [Google Scholar] [CrossRef]
- Merabet, A.; Tawfique Ahmed, K.; Ibrahim, H.; Beguenane, R.; Ghias, A.M.Y.M. Energy management and control system for laboratory scale microgrid based wind-PV-battery. IEEE Trans. Sustain. Energy 2017, 8, 145–154. [Google Scholar] [CrossRef]
- Angadi, S.; Yaragatti, U.R.; Suresh, Y.; Raju, A.B. Comprehensive review on solar, wind and hybrid wind-PV water pumping systems-an electrical engineering perspective. CPSS Trans. Power Electron. Appl. 2021, 6, 1–19. [Google Scholar] [CrossRef]
- Chaib, A.; Achour, D.; Kesraoui, M. Control of a solar PV/wind hybrid energy system. Energy Procedia 2016, 95, 89–97. [Google Scholar] [CrossRef] [Green Version]
- Prakash, S.L.; Arutchelvi, M.; Jesudaiyan, A.S. Autonomous PV-array excited wind-driven induction generator for off-grid application in India. IEEE J. Emerg. Sel. Top. Power Electron. 2016, 4, 1259–1269. [Google Scholar] [CrossRef]
- Traoré, A.K.; Cardenas, A.; Doumbia, M.L.; Agbossou, K. Comparative Study of Three Power Management Strategies of a Wind PV Hybrid Stand-Alone System for Agricultural Applications. In Proceedings of the IECON2018-44th Annual Conference of the IEEE Industrial Electronics Society, Washington, DC, USA, 21–23 October 2018; pp. 1711–1716. [Google Scholar]
- Pradhan, S.; Singh, B.; Panigrahi, B.K.; Murshid, S. A composite sliding mode controller for wind power extraction in remotely located solar PV–wind hybrid system. IEEE Trans. Ind. Electron. 2019, 66, 5321–5331. [Google Scholar] [CrossRef]
- Parida, A.; Chatterjee, D. Stand-alone AC-DC microgrid-based wind solar hybrid generation scheme with autonomous energy exchange topologies suitable for remote rural area power supply. Int. Trans. Electr. Energy Syst. 2018, 28, 2520. [Google Scholar] [CrossRef]
- Parida, A.; Choudhury, S.; Chatterjee, D. Microgrid based hybrid energy co-operative for grid-isolated remote rural village power supply for east coast zone of India. IEEE Trans. Sustain. Energy 2018, 9, 1375–1383. [Google Scholar] [CrossRef]
- Rezkallah, M.; Hamadi, A.; Chandra, A.; Singh, B. Design and implementation of active power control with improved P&O method for wind-PV-battery-based standalone generation system. IEEE Trans. Ind. Electron. 2018, 65, 5590–5600. [Google Scholar]
- Aloo, L.A.; Kihato, P.K.; Kamau, S.I.; Orenge, R.S. Model Predictive Control-Adaptive Neuro-Fuzzy Inference System Control Strategies for Photovoltaic-Wind Microgrid: Feasibility Review. In Proceedings of the 2020 IEEE PES/IAS PowerAfrica, Nairobi, Kenya, 25–28 August 2020; pp. 1–5. [Google Scholar] [CrossRef]
- Sujil, A.; Kumar, R.; Bansal, R.C. FCM Clustering-ANFIS-based PV and wind generation forecasting agent for energy management in a smart microgrid. IET J. Eng. 2019, 18, 4852–4857. [Google Scholar] [CrossRef]
- Arfeen, Z.A.; Khairuddin, A.B.; Larik, R.M.; Saeed, M.S. Control of distributed generation systems for microgrid applications: A technological review. Int. Trans. Elec. Energy Syst. 2019, 29, e12072. [Google Scholar] [CrossRef] [Green Version]
- Ahmadi, S.M.; Fateh, M.M. Task-space asymptotic tracking control of robots using a direct adaptive Taylor series controller. J. Vib. Control 2018, 24, 5570–5584. [Google Scholar] [CrossRef]
- Wei, Y.; Qiu, J.; Karimi, H.R. Reliable Output Feedback Control of Discrete-Time Fuzzy Affine Systems with Actuator Faults. IEEE Trans. Circuits Syst. I Reg. Pap. 2017, 64, 170–181. [Google Scholar] [CrossRef]
- Zirkohi, M.M. Direct adaptive function approximation techniques-based control of robot manipulators. J. Dyn. Syst. Meas. Contr. 2018, 140, 011006. [Google Scholar] [CrossRef]
- Kayacan, E.; Kayacan, E.; Ramon, H.; Saeys, W. Adaptive neuro-fuzzy control of a spherical rolling robot using sliding-mode-control-theory-based online learning algorithm. IEEE Trans. Cybern. 2013, 43, 170–179. [Google Scholar] [CrossRef]
- Mushage, B.O.; Chedjou, J.C.; Kyamakya, K. An extended neuro-fuzzybased robust adaptive sliding mode controller for linearizable systems and its application on a new chaotic system. Nonlinear Dyn. 2016, 83, 1601–1619. [Google Scholar] [CrossRef]
- Miranian, A.; Abdollahzade, M. Developing a local least-squares support vector machines-based neuro-fuzzy model for nonlinear and chaotic time series prediction. IEEE Trans. Neural Netw. Learn. Syst. 2013, 24, 207–218. [Google Scholar] [CrossRef]
- Azadeh, A.; Gaeini, Z.; Haghighi, S.M.; Nasirian, B. A unique adaptive neuro fuzzy inference system for Optimum decision making process in a natural gas transmission unit. J. Nat. Gas. Sci. Eng. 2016, 34, 472–485. [Google Scholar] [CrossRef] [Green Version]
- Petković, D.; Shamshirband, S.; Anuar, N.B.; Sabri, A.Q.M.; Rahman, Z.B.A.; Pavlovic, N.D. Input displacement neuro-fuzzy control and object recognition by compliant multi-fingered passively adaptive robotic gripper. J. Intell. Robot. Syst. 2016, 82, 177–187. [Google Scholar] [CrossRef]
- Lotfi, E.; Rezaee, A.A. Generalized BELBIC; Neural Computing and Applications; Springer: Berlin, Germany, 2018. [Google Scholar]
- Sharma, P. Design of novel BELBIC controlled semi-active suspension and comparative analysis with passive and PID controlled suspension. Walailak J. Sci. Technol. 2021, 18, 8989. [Google Scholar] [CrossRef]
- Ershadi, M.H.; Shojaeian, S.; Keramat, R. A comparison of fuzzy and brain emotional learning-based intelligent control approaches for a full bridge DC-DC converter. Int. J. Ind. Electron. Control Optim. 2019, 2, 197–206. [Google Scholar]
- Zirkohi, M.M. Stability analysis of brain emotional intelligent controller with application to electrically driven robot manipulators. IET Sci. Meas. Technol. 2020, 14, 182–187. [Google Scholar] [CrossRef]
- Sharma, P.; Kumar, V. Design and analysis of novel bio inspired BELBIC and PSOBELBIC controlled semi active suspension. Int. J. Veh. Perform. 2020, 6, 399–424. [Google Scholar] [CrossRef]
- Abd El-Gawad, A.; Elden, A.N.; Bahgat, M.E.; Ghany, A.A. BELBIC Load Frequency Controller Design for a Hydro-Thermal Power System. In Proceedings of the 2019 21st International Middle East Power Systems Conference (MEPCON), Cairo, Egypt, 17–19 December 2019. [Google Scholar]
- Al Alahmadi, A.A.; Belkhier, Y.; Ullah, N.; Abeida, H.; Soliman, M.S.; Khraisat, Y.S.H.; Alharbi, Y.M. Hybrid wind/PV/battery energy management-based intelligent non-integer control for smart DC-microgrid of smart university. IEEE Access 2021, 9, 98948–98961. [Google Scholar] [CrossRef]
- Karan, D.; Harish, V.S.K.V. Analysis of a wind-PV battery hybrid renewable energy system for a dc microgrid. Mater. Today Proc. 2021, 46, 5451–5457. [Google Scholar]
- Kumar, G.B. Optimal power point tracking of solar and wind energy in a hybrid wind solar energy system. Int. J. Energy Environ. Eng. 2021, 1–27. [Google Scholar] [CrossRef]
- Masters, G.M. Renewable and Efficient Electric Power Systems, 2nd ed.; Wiley-IEEE Press: New York, NY, USA, 2013. [Google Scholar]
- Atawi, I.E.; Hendawi, E.; Zaid, S.A. Analysis and design of a standalone electric vehicle charging station supplied by photovoltaic energy. Processes 2021, 9, 1246. [Google Scholar] [CrossRef]
- Saad, S.S.; Zainuri, M.A.A.M.; Hussain, A. Implementation of Maximum Power Point Tracking Techniques for PV-Wind Hybrid Energy System: A Review. In Proceedings of the 2021 International Conference on Electrical Engineering and Informatics (ICEEI), Kuala Terengganu, Malaysia, 12–13 October 2021; pp. 1–6. [Google Scholar] [CrossRef]
- IEEE-519; IEEE Recommended Practices and Requirements for Harmonic Control in Electric Power Systems. IEEE: New York, NY, USA, 1992.











{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Item | Parameter | Value |
|---|---|---|
| Wind turbine | Rated power | 10 KW |
| Rated wind speed | 12 m/s | |
| wind speed range | 3.5–25 m/s | |
| PV | SC current | 21.2 A |
| OC voltage | 257.1 V | |
| Max. power | 5.4 kW | |
| Load | Voltage | 110 V |
| Frequency | 50 Hz |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Albalawi, H.; El-Shimy, M.E.; AbdelMeguid, H.; Kassem, A.M.; Zaid, S.A. Analysis of a Hybrid Wind/Photovoltaic Energy System Controlled by Brain Emotional Learning-Based Intelligent Controller. Sustainability 2022, 14, 4775. https://doi.org/10.3390/su14084775
Albalawi H, El-Shimy ME, AbdelMeguid H, Kassem AM, Zaid SA. Analysis of a Hybrid Wind/Photovoltaic Energy System Controlled by Brain Emotional Learning-Based Intelligent Controller. Sustainability. 2022; 14(8):4775. https://doi.org/10.3390/su14084775
Chicago/Turabian StyleAlbalawi, Hani, Mohamed E. El-Shimy, Hosam AbdelMeguid, Ahmed M. Kassem, and Sherif A. Zaid. 2022. "Analysis of a Hybrid Wind/Photovoltaic Energy System Controlled by Brain Emotional Learning-Based Intelligent Controller" Sustainability 14, no. 8: 4775. https://doi.org/10.3390/su14084775