
Detection of Multiple Drones in a Time-Varying Scenario Using Acoustic Signals

 , ,
, ,
Abstract
:1. Introduction
- Drone detection has been performed in previous works while considering the quasi-static channels. In this research, we concentrate on time-varying mixing channels to detect the unauthorized drones in a practical scenario. In order to achieve this objective, a channel tracking technique is proposed to track the channel variations in a time-varying scenario. The proposed technique is based on the estimated mixing matrices using the FastICA algorithm [42].
- The time varying drone detection (TVDDT) technique is proposed to detect single as well as multiple drones in the presence of strong interfering sources considering the time-varying scenario in which the drones are in motion.
- The detection of the drones is performed in a time-varying scenario considering the drones when the interfering sources are in motion. This becomes a challenging issue in drone detection utilizing audio signals.
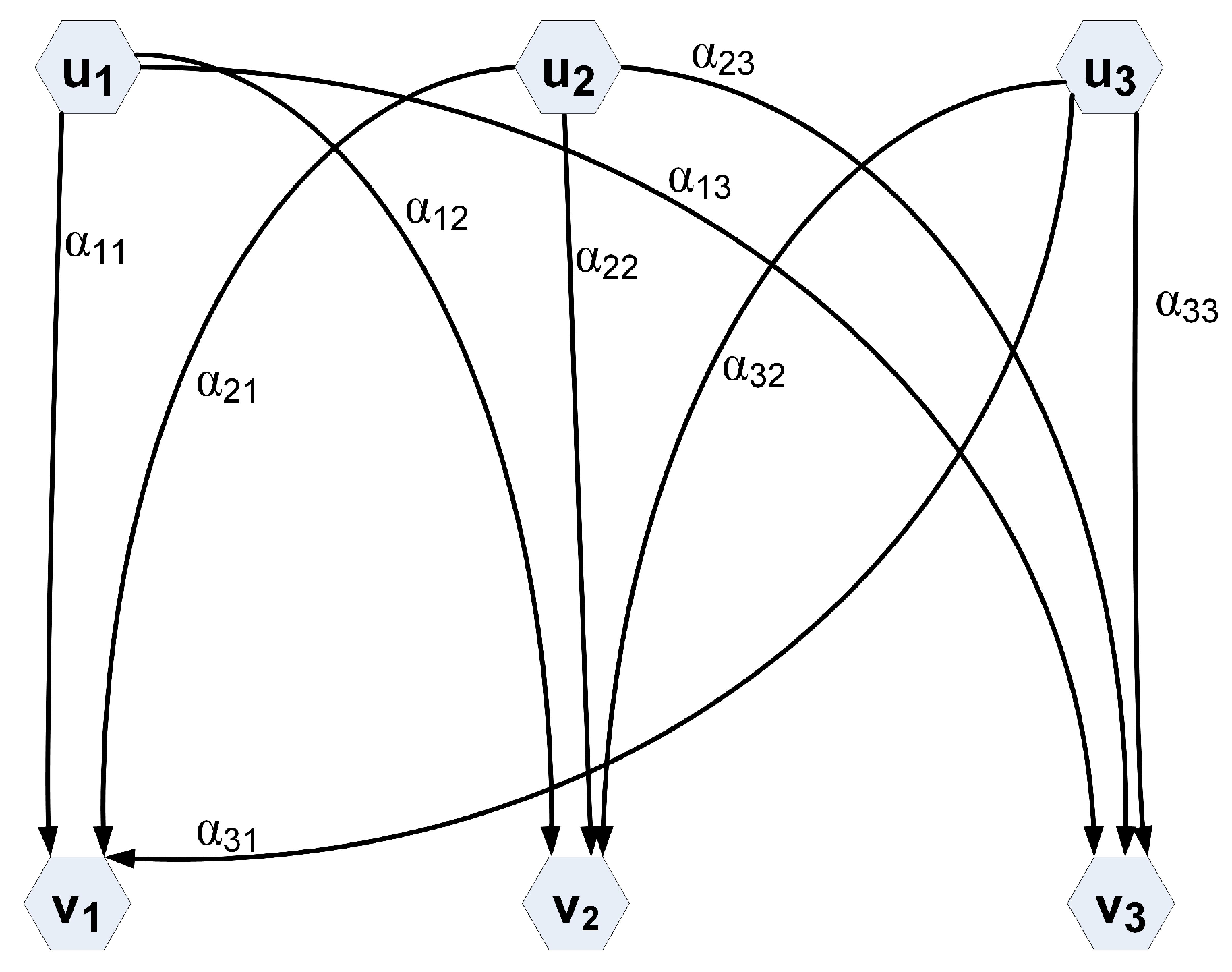
2. The System Model
3. The Proposed TVDDT Technique
3.1. Time-Varying Scenario of the Flying Drones
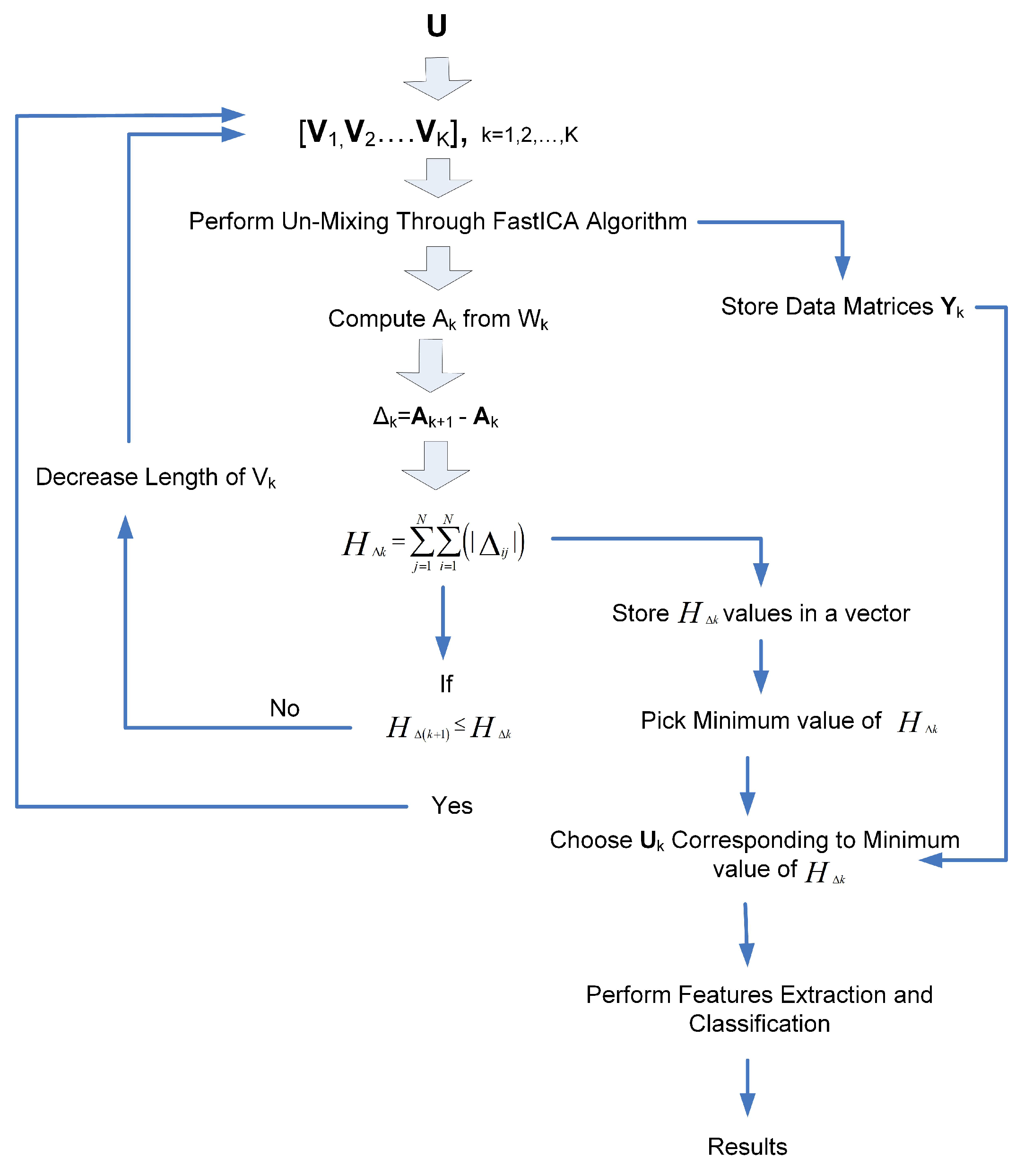
3.2. The TVDDT Technique
| Algorithm 1: The TVDDT algorithm. |
 |
4. Simulation Results
5. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Kellner, J.R.; Armston, J.; Birrer, M.; Cushman, K.C.; Duncanson, L.; Eck, C.; Falleger, C.; Imbach, B.; Trochta, J.; Zgraggen, C.; et al. New opportunities for forest remote sensing through ultra-high-density drone lidar. Surv. Geophys. 2019, 40, 959–997. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Yoon, H.; Hyojeong, S.; Cheolsoon, L.; Byungwoon, P. An Online SBAS Service to Improve Drone Navigation Performance in High-Elevation Masked Areas. Sensors 2020, 20, 3047. [Google Scholar] [CrossRef] [PubMed]
- Patrik, A.; Utama, G.; Gunawan, A.A.S.; Chowanda, A.; Suroso, J.S.; Shofiyanti, R.; Budiharto, W. GNSS-based navigation systems of autonomous drone for delivering items. J. Big Data 2019, 6, 2–14. [Google Scholar] [CrossRef] [Green Version]
- Florea, A.G.; Catalin, B. Sensor fusion for autonomous drone waypoint navigation using ROS and numerical P systems: A critical analysis of its advantages and limitations. In Proceedings of the IEEE 22nd International Conference on Control Systems and Computer Science (CSCS), Bucharest, Romania, 26–28 May 2019; pp. 112–117. [Google Scholar]
- Adami, A.; Fregonese, L.; Gallo, M.; Helder, J.; Pepe, M.; Treccani, D. Ultra Light UAV Systems for the Metrical Documentation of Cultural Heritage: Applications for Architecture and Archaeology. In Proceedings of the 6th International Workshop LowCost 3D—Sensors, Algorithms, Applications, Strasbourg, France, 2–3 December 2019; Volume 42, pp. 15–21. [Google Scholar]
- Khelifi, A.; Ciccone, G.; Altaweel, M.; Basmaji, T.; Ghazal, M. Autonomous Service Drones for Multimodal Detection and Monitoring of Archaeological Sites. Appl. Sci. 2021, 11, 10424. [Google Scholar] [CrossRef]
- Harvard, J.; Mats, H.; Ingela, W. Journalism from above: Drones and the Media in Critical Perspective. Media Commun. 2020, 8, 60–63. [Google Scholar] [CrossRef]
- Hwang, J.; Lee, J.; Kim, J.J.; Sial, M.S. Application of internal environmental locus of control to the context of eco-friendly drone food delivery services. J. Sustain. Tour. 2020, 29, 1098–1116. [Google Scholar] [CrossRef]
- De, M.; Giulia Eliseo, F. Quality-dependent adaptation in a swarm of drones for environmental monitoring. In Proceedings of the IEEE International Conference On Advances in Science and Engineering Technology (ASET), Dubai, United Arab Emirates, 4 February–9 April 2020. [Google Scholar]
- Shahmoradi, J.; Talebi, E.; Roghanchi, P.; Hassanalian, M. A Comprehensive Review of Applications of Drone Technology in the Mining Industry. Drones 2020, 4, 34. [Google Scholar] [CrossRef]
- Kaleem, Z.; Mubashir, H.R. Amateur Drone Monitoring: State-of-the-Art Architectures, Key Enabling Technologies, and Future Research Directions. IEEE Wirel. Commun. 2018, 25, 150–159. [Google Scholar] [CrossRef] [Green Version]
- Ding, G.; Wu, Q.; Zhang, L.; Lin, Y.; Tsiftsis, T.A.; Yao, Y.D. An amateur drone surveillance system based on the cognitive Internet of Things. IEEE Commun. Mag. 2018, 56, 29–35. [Google Scholar]
- Liu, H.; Wei, Z.; Chen, Y.; Pan, J.; Lin, L.; Ren, Y. Drone detection based on an audio-assisted camera array. In Proceedings of the Third International Conference on Multimedia Big Data (BigMM), IEEE, Laguna Hills, CA, USA, 19–21 April 2017; pp. 402–406. [Google Scholar]
- Anwar, M.Z.; Kaleem, Z. Machine Learning Inspired Sound-based Amateur Drone Detection for Public Safety Applications. IEEE Trans. Veh. Technol. 2018, 68, 2526–2534. [Google Scholar] [CrossRef]
- Kim, J.; Park, C.; Ahn, J.; Ko, Y.; Park, J.; Gallagher, J.C. Realtime UAV sound detection and analysis system. Sensors Applications Symposium (SAS). In Proceedings of the 2017 IEEE Sensors Applications Symposium (SAS), Glassboro, NJ, USA, 13–15 March 2017; pp. 1–5. [Google Scholar]
- Shi, L.; Ahmad, I.; He, Y.; Chang, K. Hidden markov model based drone sound recognition using MFCC technique in practical noisy environments. J. Commun. Netw. 2020, 20, 509–518. [Google Scholar] [CrossRef]
- Drozdowicz, J.; Wielgo, M.; Samczynski, P.; Kulpa, K.; Krzonkalla, J.; Mordzonek, M.; Bryl, M.; Jakielaszek, Z. 35 GHz FMCW drone detection system in 17th International Radar Symposium (IRS). In Proceedings of the 2016 17th International Radar Symposium (IRS), Krakow, Poland, 10–12 May 2016; pp. 1–4. [Google Scholar]
- Rydén, H.; Redhwan, S.B.; Lin, X. Rogue drone detection: A machine learning approach. arXiv 2018, arXiv:1805.05138. [Google Scholar]
- Mezei, J.; Molnár, A. Drone sound detection by correlation. In Proceedings of the 11th International Symposium on Applied Computational Intelligence and Informatics (SACI), IEEE, Timisoara, Romania, 12–14 May 2016; pp. 509–518. [Google Scholar]
- Salman, S.; Mir, J.; Farooq, M.T.; Malik, A.N.; Haleemdeen, R. Machine learning inspired efficient audio drone detection using acoustic features. In Proceedings of the 2021 International Bhurban Conference on Applied Sciences and Technologies (IBCAST), IEEE, Islamabad, Pakistan, 12–16 January 2021. [Google Scholar]
- Al-Emadi, S.; Abdulla, A.-A.; Abdulaziz, A.-A. Audio-Based Drone Detection and Identification Using Deep Learning Techniques with Dataset Enhancement through Generative Adversarial Networks. Sensors 2021, 21, 4953. [Google Scholar] [CrossRef] [PubMed]
- Mandal, S.; Chen, L.; Alaparthy, V.; Cummings, M.L. Acoustic detection of drones through real-time audio attribute prediction. In Proceedings of the AIAA Scitech 2020 Forum, Orlando, FL, USA, 6–10 January 2020. [Google Scholar]
- Zhang, J.; Zhitao, Y.; Xiangyu, W.; Lyu, Y.; Mao, S.; Periaswamya, S.C.G.; Pattona, J.; Wang, X. RFHUI: An RFID based human-unmanned aerial vehicle interaction system in an indoor environment. Digit. Commun. Netw. 2020, 6, 14–22. [Google Scholar] [CrossRef]
- Lee, J.; Wang, J.; Crandall, D.; Šabanović, S.; Fox, G. Real-time, cloud-based object detection for unmanned aerial vehicles. In Proceedings of the 2017 First IEEE International Conference on Robotic Computing (IRC), IEEE, Taichung, Taiwan, 10–12 April 2017. [Google Scholar]
- Iannace, G.; Giuseppe, C.; Amelia, T. Acoustical unmanned aerial vehicle detection in indoor scenarios using logistic regression model. Build. Acoust. 2021, 28, 77–96. [Google Scholar] [CrossRef]
- Carrivick, J.L.; Mark, W.S. Fluvial and aquatic applications of Structure from Motion photogrammetry and unmanned aerial vehicle/drone technology. Wiley Interdiscip. Rev. Water 2019, 6, 13–28. [Google Scholar] [CrossRef] [Green Version]
- Vomvas, M.; Erik-Oliver, B.; Guevara, N. SELEST: Secure elevation estimation of drones using MPC. In Proceedings of the 14th ACM Conference on Security and Privacy in Wireless and Mobile Networks, Abu Dhabi, United Arab Emirates, 28 June–2 July 2021; pp. 238–249. [Google Scholar]
- Wojtanowski, J.; Zygmunt, M.; Drozd, T.; Jakubaszek, M.; Życzkowski, M.; Muzal, M. Distinguishing Drones from Birds in a UAV Searching Laser Scanner Based on Echo Depolarization Measurement. Sensors 2021, 21, 5597. [Google Scholar] [CrossRef]
- Azari, M.M.; Sallouha, H.; Chiumento, A.; Rajendran, S.; Vinogradov, E.; Pollin, S. Key technologies and system trade-offs for detection and localization of amateur drones. IEEE Commun. Mag. 2018, 56, 51–57. [Google Scholar] [CrossRef] [Green Version]
- Uddin, Z.; Altaf, M.; Bilal, M.; Nkenyereye, L.; Bashir, A.K. Amateur Drones Detection: A machine learning approach utilizing the acoustic signals in the presence of strong interference. Comput. Commun. 2020, 154, 236–245. [Google Scholar] [CrossRef] [Green Version]
- Lee, S.J.; Jung, J.H.; Park, B. Possibility verification of drone detection radar based on pseudo random binary sequence. In Proceedings of the IEEE International SoC Design Conference (ISOCC), Jeju, Korea, 23–26 October 2016; pp. 291–292. [Google Scholar]
- Muller, T. Robust Drone Detection for Day/Night Counter-UAV with Static VIS and SWIR Cameras, Ground/Air Multisensor Interoperability, Integration, and Networking for Persistent ISR VIII; International Society for Optics and Photonics: Bellingham, WS, USA, 2017; p. 10190. [Google Scholar]
- Ivanov, S.; Stankov, S.; Wilk-Jakubowski, J.; Stawczyk, P. The using of Deep Neural Networks and acoustic waves modulated by triangular waveform for extinguishing fires. In New Approaches for Multidimensional Signal Processing; Springer: Berlin/Heidelberg, Germany, 2021; pp. 207–218. [Google Scholar]
- Kountchev, R.; Rumen, M.; Shengqing, L. New Approaches for Multidimensional Signal Processing: Proceedings of International Workshop, NAMSP 2020; Springer: Singapore, 2021. [Google Scholar]
- Madani, K.; Kachurka, V.; Sabourin, C.; Amarger, V.; Golovko, V.; Rossi, L. A human-like visual-attention-based artificial vision system for wildland firefighting assistance. Appl. Intell. 2018, 48, 2157–2179. [Google Scholar] [CrossRef]
- Wilk-Jakubowski, J.L.; Stawczyk, P.; Ivanov, S.; Stankov, S. Control of acoustic extinguisher with Deep Neural Networks for fire detection. Elektron. Elektrotechnika 2022, 28, 52–59. [Google Scholar] [CrossRef]
- Toulouse, T.; Rossi, L.; Akhloufi, M.; Celik, T.; Maldague, X. Benchmarking of wildland fire colour segmentation algorithms. IET Image Process. 2015, 9, 1064–1072. [Google Scholar] [CrossRef] [Green Version]
- Miklavčič, P.; Matjaž, V.; Boštjan, B. Patch-monopole monopulse feed for deep reflectors. Electron. Lett. 2018, 54, 1364–1366. [Google Scholar] [CrossRef] [Green Version]
- Garg, A.K.; Janyani, V.; Batagelj, B.; Abidin, N.H.Z.; Bakar, M.H.A. Hybrid FSO/fiber optic link based reliable & energy efficient WDM optical network architecture. Opt. Fiber Technol. 2021, 61, 102422. [Google Scholar]
- Kumar, A.; Rout, S.S.; Goel, V. Speech Mel frequency cepstral coefficient feature classification using multi level support vector machine. In Proceedings of the 4th IEEE Uttar Pradesh Section International Conference on Electrical, Computer and Electronics (UPCON), Mathura, India, 26–28 October 2017; pp. 134–138. [Google Scholar]
- Grama, L.; Tuns, L.; Rusu, C. On the optimization of SVM kernel parameters for improving audio classification accuracy. In Proceedings of the 14th International Conference on Engineering of Modern Electric Systems (EMES), Oradea, Romania, 1–2 June 2017; pp. 224–227. [Google Scholar]
- Basiri, S.; Esa, O.; Visa, K. Alternative derivation of FastICA with novel power iteration algorithm. IEEE Signal Process. Lett. 2017, 24, 1378–1382. [Google Scholar] [CrossRef]
- Available online: https://www.soundsnap.com/tags (accessed on 11 March 2021).
- Uddin, Z.; Ahmad, A.; Iqbal, M.; Naeem, M. Applications of independent component analysis in wireless communication systems. Wirel. Pers. Commun. 2015, 83, 2711–2737. [Google Scholar] [CrossRef]
- Oppenheim, A.V.; Schafer, R.W. Discrete-Time Signal Processing, 3rd ed.; Prentice Hall Press: Upper Saddle River, NJ, USA, 2009. [Google Scholar]















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| ICA | Independent component analysis |
| Radio frequency | RF |
| Support vector machines | SVM |
| SNR | Signal-to-noise ratio |
| Signal-to-interference ratio | |
| K-nearest neighbors | KNN |
| Time-varying drone detection technique | TVDDT |
| Linear predictive cepstral coefficients | LPCC |
| Mel-frequency cepstral coefficients | MFCC |
| Power spectral density | PSD |
| Data Block Length | Method | SVM-ICA | KNN-ICA |
|---|---|---|---|
| L = 10,000 | PSD | 92.57 | 97.9 |
| RMS PSD | 96.1 | 99.1 | |
| MFCC | 88.2 | 97.4 | |
| L = 7000 | PSD | 91 | 97.2 |
| RMS PSD | 94.9 | 98.3 | |
| MFCC | 87.6 | 97 | |
| L = 4000 | PSD | 90.3 | 96.7 |
| RMS PSD | 94.1 | 98 | |
| MFCC | 87.0 | 96.7 | |
| L = 1000 | PSD | 89.7 | 96.0 |
| RMS PSD | 93.3 | 97.1 | |
| MFCC | 86.8 | 95.3 |
| Data Block Length L | Method | SVM- ICA | KNN- ICA | SVM- TVDDT | KNN- TVDDT |
|---|---|---|---|---|---|
| L = 10,000 | PSD | 40.57 | 41.9 | 90 | 92.2 |
| RMS PSD | 42.1 | 43.1 | 90.12 | 93.8 | |
| MFCC | 38.2 | 42.4 | 83.21 | 92.13 | |
| L = 7000 | PSD | 43 | 42.2 | 87 | 93.6 |
| RMS PSD | 40.9 | 41.3 | 91 | 93.9 | |
| MFCC | 38.6 | 39.53 | 84.2 | 93.1 | |
| L = 4000 | PSD | 43.3 | 42.7 | 87.3 | 93.45 |
| RMS PSD | 42.1 | 43.01 | 95.01 | 95.76 | |
| MFCC | 40.0 | 41.7 | 85.1 | 94.01 | |
| L = 1000 | PSD | 44.7 | 45.0 | 90.61 | 95.01 |
| RMS PSD | 43.3 | 44.1 | 93.96 | 96.75 | |
| MFCC | 40.8 | 42.3 | 86 | 95.35 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Uddin, Z.; Qamar, A.; Alharbi, A.G.; Orakzai, F.A.; Ahmad, A. Detection of Multiple Drones in a Time-Varying Scenario Using Acoustic Signals. Sustainability 2022, 14, 4041. https://doi.org/10.3390/su14074041
Uddin Z, Qamar A, Alharbi AG, Orakzai FA, Ahmad A. Detection of Multiple Drones in a Time-Varying Scenario Using Acoustic Signals. Sustainability. 2022; 14(7):4041. https://doi.org/10.3390/su14074041
Chicago/Turabian StyleUddin, Zahoor, Aamir Qamar, Abdullah G. Alharbi, Farooq Alam Orakzai, and Ayaz Ahmad. 2022. "Detection of Multiple Drones in a Time-Varying Scenario Using Acoustic Signals" Sustainability 14, no. 7: 4041. https://doi.org/10.3390/su14074041