1. Introduction
Since 2016, technological development has accelerated to reproduce sustainable development goals. There has been much talk about the Fourth Industrial Revolution (4IR), which in its simplest definition refers to the continued digitization of traditional manufacturing and industrial practices, using Artificial Intelligence (AI), Internet of Things (IoT), Unmanned Aerial Vehicles (UAVs), robotics and other aspects of modern technology. Integrating these kinds of technologies aims to make smart devices and computers think and analyze like the human brain to ensure a secure, decentralized, and transparent way of recording and exchanging data, which integrates the digital and physical worlds. Further, the rapid development of the 4IR allows manufacturing using fewer tools at lower cost and in a faster way. The integration of the 4IR also can help in maximizing the technological benefits of societies and minimize the risks associated with the technologies across the globe [
1,
2].
Many researchers have touched upon the importance of media compatibility with the technologies of the 4IR, such as AI and drones, not only at the institutional level but also at the level of human talent regarding preparation and training of media professionals on such tools. This allows us to witness the launch of aerial journalism with smart capabilities, where the digital world is now heading towards a new press. This is the era of aerial journalism that created a new revolution in the media industry, where there are no geographical limits, and no restrictions placed by governments on the freedom to report news, or access to information. It is expected that the volume of global spending on artificial intelligence will reach about 1 trillion USD in 2030. Especially since the largest companies in the world are pumping millions of dollars into investments in this field. It is no wonder that during the next five years, growth in AI rates will be included as an indicator within the indicators of global economic growth, as well as the per capita share of the technology of the 4IR, along with rates of national income, gross domestic product, inflation, and other factors. These are indicators that measure the country’s economic strength, all of which strongly support the growth of aerial journalism [
3,
4].
There are several benefits that drones have brought to the field of sustainability. For instance, drones with HD cameras are a very useful tool when flying over large tracts of land to obtain images quickly, which achieve the reduction of pollutant emissions derived from similar vehicles such as helicopters. The term of aerial journalism has not been touched upon from the 4IR technological point of few. The media seeks to employ smart technologies to the fullest in terms of various aspects: (1) Relying on the latest satellites that penetrate the Internet speed beyond a thousand mega-bytes; (2) Using cameras on board the drones to obtain clearer and more comprehensive images than the vision of the naked eye; (3) Utilizing drones and smart robots to cover events in the most dangerous places, where it is difficult for humans to reach, such as war zones, during natural disasters (e.g., earthquakes, fires), above skyscrapers or oceans, or even crowded events (e.g., sport events) [
5,
6,
7]. Therefore, we have been encouraged to address this research question: What solutions can be gained when coupling drones with AI technologies for our digital journalism?
Therefore, since the technology creates media, this work is motivated to cover this untapped area and present a new model of aerial journalism via coupling UAV with AI, where such an investigation can be benefited from the technological development and capabilities of modern drone software and hardware, as well as AI optimization capabilities. This work has considered “Action Research Methodology”, where this methodology aims to build knowledge (stage 1) and practical action (stage 2), then engages in a cyclic process that interchanges between action and critical analysis (stage 3) with continuous adjustments and reflection (stage 4) to extend the understanding of considered action. Further, this methodology seeks transformative change throughout the simultaneous process of acting and doing research, which are associated together by critical reflection.
Smart journalism or smart media terms have emerged and gained media attention over the last several years to offer unique perspectives that enrich news storytelling. These terminologies refer to the ability of using different forms of technologies such as portable and/or automated devices like camcorders, laptops, smartphones, tablets or even drones to perform media storytelling, reporting, and conveying multimedia content in more efficient and cost-effective manners. Indeed, with the advancement of drones, organizations, and journalists have employed this technology to capture and share breaking news, and to provide sights of natural disasters that would be hard and/or dangerous to be obtained when using traditional media gathering approaches.
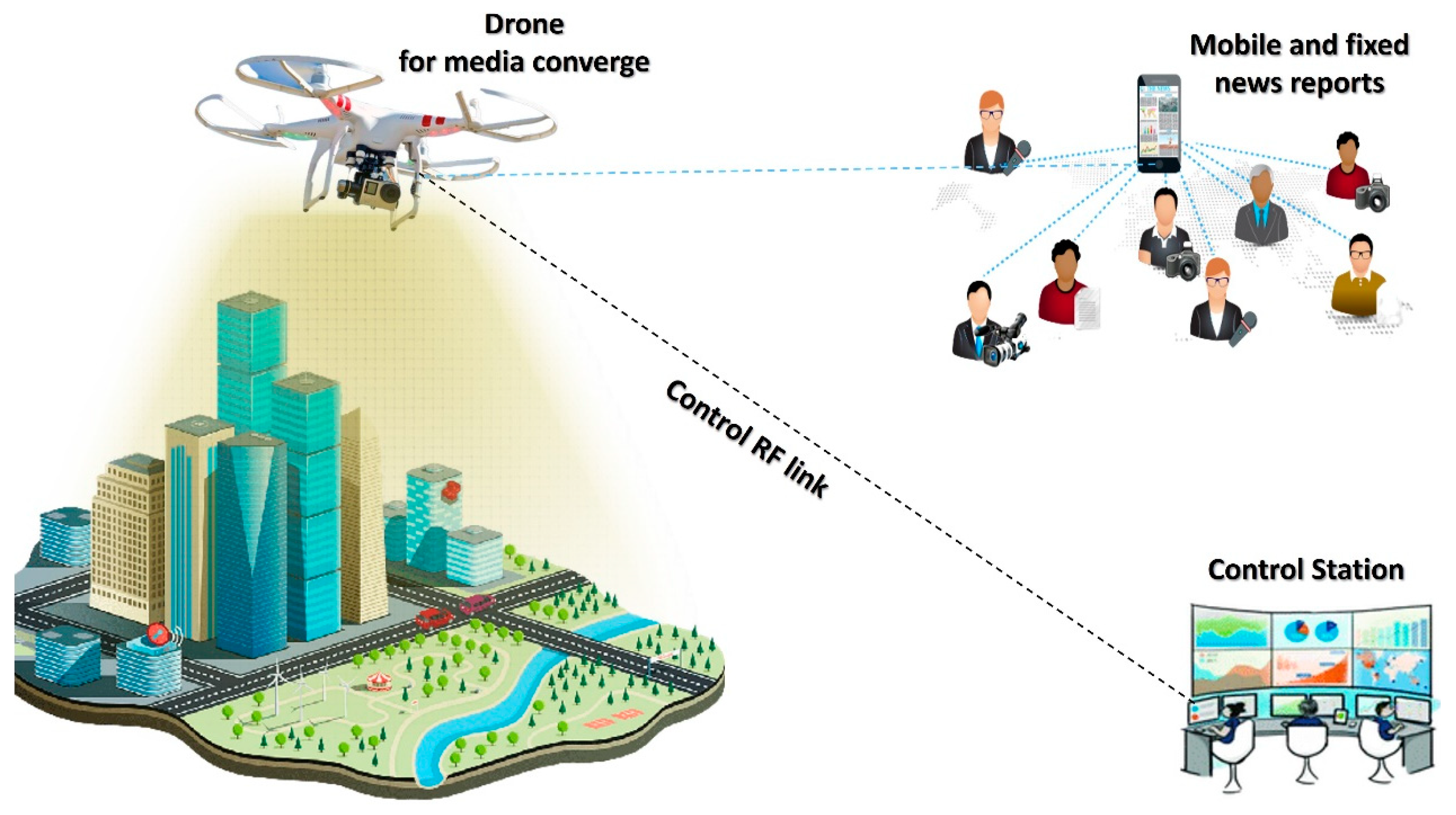
Figure 1 shows an overview of the smart journalism concept using a drone, where a drone can report news and/or collect multimedia contexts from some events (e.g., sport events) in a timely and geographically unrestricted news coverage. Then, the drone reports the obtained multimedia news to the control station using a radio frequency (RF) link for further analysis and storage. In addition, the drone can send the contexts to media reporters, who are either mobile and/or fixed ones.
To the best of our knowledge, this is the first work that considers an optimized propagation model that integrates both drone and AI to empower smart journalism and make it more sustainable and an eco-efficient process. To obtain novelty and make a noticeable shift from existing work, there are key contributions of this work:
- ▪
Testing and evaluating set propagation models, which are representatives of their types from an aerial perspective using NN-RBFN approach,
- ▪
The optimized propagation model would exhibit advantages of accuracy, strong connectivity, and wide media coverage,
- ▪
Validating obtained results against other well-known, optimized propagation models as proof-of-concept using 3D Remcom Wireless Insite tools.
The rest of the paper is organized as follows:
Section 2 presents related work and highlights this paper’s motivation followed by
Section 3 which describes the proposed drone-enabled AI framework. Both simulation, implementation, and discussion are presented in
Section 4.
Section 5 concludes.
2. Related Works
A state-of-the-art analysis is drawn in this section with a highlight of major and most recent applications of utilizing various 4IR technologies such as UAV, IoT, and AI for aerial journalism. Communication technologies of UAV along with its related propagation models have also been covered in this section. This section concludes with highlighting the research gaps and reports our research motivations.
UAVs are seen as invaluable tools of providing services, both in disaster circumstances and as infrastructure extensions to services such as special events, let alone when UAVs become integrated with AI technology. Researchers in [
8] present an investigating report of the role of drones in TV, online journalism, media, and transformation journalistic practice. The study emphasizes that nowadays, drones embrace more moving images filmed from drones than ever before, where applications are rapidly increasing. Further, a term “Drone Journalism” is introduced in [
9] where this aerial vehicle can do newsgathering applications in various scenarios such as conflict, civil unrest, and disaster events.
Authors in [
10] present a drone as an on-demand Quality of Service (QoS) enabler for multimedia applications in modern smart societies. Further, researchers in [
11] have combined two main elements from 4IR which are UAV and AI in one of its techniques “Game theory” for the sake of disaster management and public safety. Results of different simulated scenarios revile an acceptable level of performance. Studying behavioral characteristics towards sharing information to emergency centers is recommended as a future work.
Furthermore, the article in [
12] explores what makes drone imagery as an excellent example of visual culture call, where it shows an aerial view that led to more convincing for main news organizations as to warrant such attention and investment. Thus, visual aggregation is introduced from a drone aspect to theorize the authority of drone imagery in conventional journalistic practice. Drone imagery aggregates space visually, where its broad visual field reveals large-scale spatial patterns in ways analogous to the statistical capture/analysis of large bodies of data. It is recommended to consider more technological work to present the merit of drone journalism.
The author in [
13] gives more understanding on the role of drones in the media industry, where such a technology makes the work easy for the reporters. This study concludes with the pros and cons of the use of drones in media, where advantages outweigh disadvantages. The researcher in [
14] introduces an idea of using a drone in journalism as a robot eyewitness where it extends visual journalism through drone investigation. The researcher in [
15] calls attention towards the potential of drone technology as a telepresence platform, which represents the social extension of a human in the sky where telepresence via drone has notability which may transform drones as a new type of embodied medium.
Journalism from above is a term that has been presented in [
16], where it uses calls via drones for media purposes. The article covers topics related to adopting drones in news gathering; audience reactions in a changing media landscape, and talks between journalists and public authorities to use drones. Authors in [
17] have outlined the wanted/upcoming drone journalism services and potentials where this technology promises to generate immersive experiences. This work covers the key role of the drone in aerial journalism including journalistic demands for timely and geographically unrestricted news coverage, which can be attained by a mobile drone.
The SkyMedia system is presented in [
18] which aims to provide a unique media understanding to audiences during live short-term, large-scale events using UAV and wireless sensors network (WSN). The architecture can deliver two streams of information, namely: aerial images and HD videos by UAVs, and audio-visual contents from ground WSN. Additionally, SkyMedia can support reality maps that offer a bird’s eye view to event information. However, limited converge footprint is reported as an open issue.
Researchers in [
19] have highlighted coupling social media and drone sensing for re-liable disaster response applications via developing a reliable social signal distillation module to evaluate the event truthfulness and the source reliability. Results emphasize that a drone is an effective solution in providing disaster response for journalists’ missions. The work in [
20] presents an integrated AI and UAV framework based on a scheduling solution using the Reinforcement Machine Learning technique to increase quality for live video streaming in short-term, large-scale events (e.g., sport events). The framework discusses three main scheduling solutions which are: Static Prioritization (SP), Required Activity Detection Scheduler (RADS), and Frame Level Scheduler (FLS). The proposed scheduling solution gives reasonable results in terms of Peak Signal-to-Noise Ratio (PSNR), throughput, and packet loss rate. However, no consideration has been taken from air-to-ground link budget parameters; most importantly path loss (PL) and Received Signal Strength (RSS), where these are two main performance indicators for any wireless communication systems. Therefore, this was a motivation in our paper.
UAVs are either autonomous or remotely piloted aircrafts without requiring a human on board to fly, that can be fitted with cameras, sensors, and telecommunication payloads, to collect many types of digital, visual, and environmental data. UAVs can be classified by a broad number of characteristics such as shape, weight, endurance, range, speed, and wing loading. Further, UAVs can be divided generally into two types: aircrafts and airships. The aircrafts include fixed-wing aircraft, self-guided aircraft, or remotely piloted aircraft (e.g., drones). The airships include High/Low Altitude Platforms (HAPs or LAPs), Floating Balloons, or Tethered Balloons. UAVs have drawn expectedly tremendous attention due to their advantages and wide applications including wireless telecommunications, monitoring, high-resolution imaging, empowering smart cities, smart agriculture, atmospheric studies, remote sensing, localization, and navigation [
21,
22,
23].
An individual drone or a set of drones have been implemented in [
24] to mediate real-time breaking news coverage and to support the future drone journalism services. The study emphasized that drones have merits of the smart journalism concept including a longer range, and fast news gathering and broadcasting that can be done using an autonomous drone. Researchers in [
25] shed the light on key advantages of using UAVs by journalists’ news organizations including short time of gathering news, wide angle of coverage, and offering media content from disaster areas that are inaccessible by journalists. The article also highlights rules and regulations that are set by international bodies such as the Federal Aviation Administration (FAA) and how these are shaping the use of UAVs for journalism.
Using drones or even any form of UAVs’ platforms for media and journalism would need a wireless link budget that should be optimized. Thus, many researchers have been striving to provide various solutions in optimizing a link budget, which in turn leads to enhance wireless connectivity and throughput. These merits can be translated in a media and journalism context as high capacity of livestreaming, HD aerial imaging, and rapid and flexible news gathering. The drone technology is realized as an added value to wireless communications and to widen smart applications. Moreover, drones can be accomplished with many wireless services that can be provided from space layer to terrestrial fixed, and/or mobile users. For instance, Fifth Generation (5G), Worldwide Interoperability for Microwave Access (WiMAX), and Wireless Fidelity (WiFi) [
26,
27,
28]. Due to the aerial vehicle’s nature and capabilities, there are a list of advantages which can be gained from deploying such a system as follows:
Large coverage footprint area depending on the elevation angle and altitude,
High capacity since utilizing high frequency bands (e.g., 28 GHz, 47 GHz),
Incremental deployment and scalability,
Mobility when accessing difficult terrain regions (e.g., rural, or disastrous zones),
Fixable reconfiguration to cover short-term, large-scale events (e.g., sport or social events),
Low propagation latency due to their low altitude in comparison to satellites; hence, lower power consumption,
Low cost in manufacturing, operation, and maintenance.
As mentioned above, propagation models play a vital role in wireless communications since they measure the power density of an electromagnetic wave as it propagates over space. Numerous valuable information can be attained from these propagation models such as pathloss (PL) and coverage, which help in monitoring system performance and network planning. Researchers are striving to investigate propagation path loss model types and characteristics that are used for UAVs, since Radio Frequency (RF) signals propagate through free space to reach a complex ground ubiquitous environment with scattering and shadowing effects. Thus, references such as [
29] consider free space-based models such as Air-To-Ground (ATG) and Two-Ray, while references such as [
30] consider empirical propagation models such as Hata and Okumura. Generally speaking, these propagation models have various factors that affect their performance such as frequency, terrain, and transmitter and receiver’s antennae heights.
Although these different propagation models have collectively offered many advantages, they also exhibit shortcomings across different environments. Therefore, it is clear to us that there is no generic propagation model that suits all environments and shows optimal performance. Further, deploying of UAV for aerial journalism is scarcely reported in the literature from a technological perspective (e.g., simulation or experiment), let alone taking the view of coupling such a technology with AI techniques. Therefore, this paper aims to integrate a drone with an AI technique called Neural Network-Radial base function network (NN-RBFN) to train the neural network to obtain an accurate channel propagation model for the sake of enhancing aerial media missions, which in turn could offer numerous media and journalism services in timely and cost-effective manners. In our study, five propagation models have been nominated that are representatives of their types and exhibit better performance across different terrains in relation to other models. Where these models are programmed in a smart decision unit, they are able to achieve a wider coverage footprint, efficient Received Signal Strength (RSS) [
31], higher throughput, better line-of-sight (LoS), and non-line-of-sight (NLoS), which collectively help in:
- ❖
Taking footage and pictures of breaking news with better angles and altitude,
- ❖
Livestreaming with high capacity since the channel model is optimized,
- ❖
Communicating with ground which corresponds with an efficient RSS threshold.
3. Proposed Drone-Enabled AI Framework
We considered UAVs, including drones in smart journalism from a technical perspective, are scarcely reported in the literature, let alone with an AI framework. Therefore, motivated by the related research review above, there are a few challenges which can be addressed to enhance the integration between UAV and AI technologies. Thus, our proposed novel technology aims to couple a drone with the artificial intelligent NN-RBFN framework to train the neural network to obtain an accurate channel propagation model to support aerial smart journalism. To obtain novelty and make a noticeable shift from existing work, there are key contributions to this work:
Testing and evaluating set propagation models, which are representatives of their types from aerial perspective using the NN-RBFN approach,
The optimized propagation model would exhibit advantages of accuracy, strong connectivity, and wide media coverage,
Validating obtained results against other well-known optimized propagation models as proof-of-concept using 3D Remcom Wireless Insite tools.
This section starts with highlighting the proposed conceptual architecture that mainly includes propagation channel models and a link budget for drone communications with their mathematical background. Then, the rest of the section introduces the proposed NN-RBFN framework along with its mathematical background to optimize a channel model.
3.1. The Proposed Conceptual Architecture
Propagation models predict signal attenuation as a measure of the power density of an electromagnetic wave as it propagates through space from a transmitter, which represents a drone in our scenario. Calculating PL is useful for monitoring system performance, network planning, and coverage to achieve perfect reception for users such as journalists.
Figure 2 shows the proposed conceptual architecture that comprises three main parts. Part one is the aerial part which consists of a drone along with its payloads (e.g., communication transceiver such as MIMO antenna, GPS sensors, and camera). Part two consists of the ground control unit that was controlled by an admin to support some of the drone’s operations functions, aerial imaging, and flight control via a user interface. Part three consists of an AI framework that helps in making smart decisions, which can save time and efforts when using such a technology, as will be discussed in the upcoming section.
The five selected propagation models are representatives of their types and exhibit better performance across different terrains in relation to other models. These models are programmed in smart decisions, unite to achieve a wider coverage footprint, efficient RSS, higher throughput, and better LoS and NLoS, which collectively help in aerial journalism. These propagation models are: ITU-R P.529-3, Hata-Davidson, Okumura, ATG, and Two-Ray models, which are denoted as M1, M2, M3, M4, M5, respectively. The first three models are examples of empirical models, while the other two are examples of free-space-based models. Further, these selected propagation models that we have considered are representative of their respective types along with their main parameters of upper limit transmission coverage distance, transmitter and receiver antennae heights, and high scale of frequency band. Mathematical representations of these models are discussed in Equations (1)–(25) [
29].
3.1.1. ITU-R P.529-3 Model
The PL of this model can be calculated in the case of an urban area as:
The PL of this model can be calculated in the case of a suburban area as:
The PL of this model can be calculated in the case of a rural area as:
where P
L is Path Loss (dB), f is Carrier Frequency (GHz), h
t is Transmitter Antenna Height (km), h
r is Receiver Antenna Height (km), d is Distance of Transmission (km), and a(h
r) is Antenna Correction Factor.
3.1.2. Hata-Davidson Model
The PL of this model can be calculated as:
The PL of this model can be calculated in the case of an urban area as:
The PL of this model can be calculated in the case of suburban or rural areas as:
where P
LHD is Path Loss of Hata-Davidson (dB), P
LHata is Path Loss of Hata Model (dB), a(h
r) is Correction Factor for mobile antenna height, f is Carrier Frequency (GHz), h
t is Transmitter Antenna Height (km), h
r is Receiver Antenna Height (km), d is Distance of Transmission (km), A, S
1 are factors that extend distance to 300 km, S
2 is correction factor for height h
t of base station antenna extending the value of h
t to 2.5 km, and S
3, S
4 are correction factors that extend frequency bands.
3.1.3. Okumura Model
The PL of this model can be calculated as:
where P
L is Path Loss (dB), L
f is Free Space Path Loss (dB), Amn (f, d) is Median Attenuation Relative to Free Space (dB), d is Distance of Transmission (km), f is Carrier Frequency (GHz), G(h
t) is Transmitter Antenna Height Gain Factor (dB), G(h
t) is Receiver Antenna Height Gain Factor (dB), h
t is Transmitter Antenna Height (km), h
r is Receiver Antenna Height (km), and G
area is Gain due to Type of Environment (dB). In order to predict P
L using Okumura’s model, Lf between the points of interest is first predicted and then the value of Amn (f, d) is added to it along with the type of terrain correction factor.
3.1.4. ATG Model
The PL of this model can be calculated as:
where
is Path Loss (dB),
is Transmitter Antenna Height (km),
is Receiver Antenna Height,
is Elevation Angle, and
is Carrier Frequency (GHz).
3.1.5. Two-Ray Model
The PL of this model can be calculated as:
where PL is Path Loss (dB), PL
(LoS), PL
NLoS refer to path losses at LoS and NLoS, respectively, ρ
LoS, ρ
NLoS refer to the probability of having LoS and NLoS, respectively at an elevation angle, d is Distance of Transmission (km), f is Carrier Frequency (GHz), and a, b, c, d, and e are ITU-R correction factors’ parameters for different environment types.
Regarding calculating the link budget parameters, each of the five selected models predicts values for five parameters: PL, RSS, fade margin (FM), signal-to-interference-noise ratio (SINR), throughput (Th), and footprint coverage. These are outputs, while inputs are transmitter power (P
t), receiver power (P
r), receiver sensitivity (R
s), transmitter antenna gains (Gt), receiver antenna gains (G
r), (L) losses, (
) transmitter altitude, which represents drone altitude, and (θ) elevation angle. Calculating RSS helps estimating the coverage range when the signal weakens as the receiver travels away from the transmitter. FM represents the value of additional path loss over the median path loss that will cause the system performance to fall below an acceptable level. It provides a margin of safety in the event of a temporary attenuation or fading of the received signal power. SINR is used to measure the quality of a wireless link and bit error ratio. Throughput (T) is one of the performance indicators, which is affected with PL, distance, and shadowing. RSS, SINR, and Th can be mathematically expressed as per Equations (22)–(25):
3.2. The Proposed AI Framework
To train the neural network to obtain an accurate channel propagation model, the five selected models and predicted path loss for an optimized wireless channel, we need to ensure the best coverage, considering maximum RSS and throughput, minimum PL, and fixed transmission power at various transmitter/receiver heights. Therefore, an optimization technique should be considered to design an intelligent switch-unit that could estimate the best model in the performance among several models which depends on the maximizing of some parameters and minimizing others across various drone altitudes. Neural Networks (NN) are considered as one of the most common optimization approaches because of their simplicity, rapid implementation, and high performance.
The NN-RBFN technique has been widely applied to many optimization issues, where it consists of more than one neuron that was trained to predict an optimum output based on algorithms and some input elements. The three basic elements of a neuron are the synaptic weights (or weights), the summing junction, and the activation function. One of the NN types is called Radial base function network (RBFN) approach [
32,
33,
34,
35]. The RBFN has three different layers: an input layer, a hidden layer, and an output layer. The input layer gets its input vector from the PL, RSS, SINR, Th, and R parameters of the five selected propagation models.
Figure 3 shows a structure of the proposed NN-RBFN technique.
The hidden layer includes several Gaussian functions that create arbitrary basis functions, so-called radial basis functions (RBF)), which are utilized to enlarge the input pattern onto the hidden layer nonlinearly. The learning approach that was chosen in this work is a semi-supervised learning approach, where the radial basis functions are selected randomly, while the determination of weights are selected in advance. The third layer produces the network output, which solves pattern classification problems. The learning rate of RBFN is accelerated, and the usual local minimum issue is avoided. The NN-RBFN technique can be expressed mathematically as shown in Equations (26)–(32).
where
Yk refers to the output of neuron,
Zj refers to output of hidden layer,
μij refers to center value,
δj (0) refers to span value,
Wk (0) refers to weight vector,
ek refers to error,
dk refers to desired pattern,
Wkj (
n + 1) refers to update the weight,
τδ refers to learning rate of span,
τμ and
τw refer to the learning rate of weight and center, respectively,
μij (
n + 1), and
δj (
n + 1) refer to update the center and span momentum, respectively.
The proposed technique solves a multi-objective optimization, which is heavily based on the “Weighted sum approach”. This approach is based on assigning a weight to each normalized objective function, thus converting the problem to a single objective problem with a scalar objective function, then, randomly generating an initial set of solutions and evolving these solutions over time and converting it into a single solution to eventually generate an optimal solution. This requires a minimax technique with as-signed weights for different parameters at various drone altitudes and elevation angles in an urban environment. In our scenario, this represents obtaining an optimum propagation model for journalism. The metrics have a wide range of parameters (e.g., PL and RSS) at various drone altitudes, and elevation angles are inserted as inputs to the NN-RBFN optimization technique to get optimized output. Thus, to meet the optimal solution, the NN-RBFN should observe the minimax of the following parameters along with their assigned weights. The advantage of smart decision-making by the optimization would help to provide proper wireless services to a given environment.
Figure 4 describes several desirable features of optimization, where parameters of Th and R should be as high as possible to obtain a high data rate. Additionally, an increase in coverage area to be as high as possible is considered to provide a wider footprint, thus better media coverage and smart reporting. Parameters RSS and SINR should be maintained between upper and lower thresholds. Parameters PL and A should be minimized to obtain better results, where parameter PL is widely considered as one of the major components in the analysis and design of the link budget of a telecommunication system.
Figure 5 shows a flowchart of applying a decision tree algorithm that helps the NN-RBFN optimization to reach a local optimal solution based on minimax technique of vital parameters. A decision tree as a classification tool is being used successfully in many areas. The purpose of using the decision tree is to generate a training model that can be used to predict the class of the target variable by learning simple decision rules. The key benefit of a decision tree classifier is its expertise to break down a complicated construct into a collection of simpler constructs; hence offering a solution that is straightforward to interpret. Clearly, the proposed algorithm consists of two phases. First, we construct a decision tree and choose the relevant variables. Second, we find the optimum thresholds simultaneously. Therefore, the process starts with defining the input parameters (A, P
t, G
t, G
r, L, and θ), whereas the rest are considered as output parameters. Then, we assigned the weights of the NN-RBFN that linked to effective parameters (PL = 10%, RSS = 20%, SINR = 10%, Th = 20%, R = 30%, and A = 10%), which in turn achieve this work’s objectives. RSS and SINR should be minimax between 40 dBm to 85 dBm, and 4 dB to 17 dB, respectively. A is ranging between 10–70 m altitude above the ground. At every altitude, θ is kept fixed at 10°, while PL, RSS, SNIR, Th, and R values will be different for every model. To note, M1, M2, M3, M4, and M5 are acronyms that refer to ITU-R P.529-3 model, Hata-Davidson model, Okumura model, ATG model, and Two-Ray model, respectively.
Our entry point to the simulation is the primary dataset of the five propagation models including 470 samples which were divided into three subsets: a training set, testing set, and validating set. Where 328 of them were dedicated to the training phase, 71 were dedicated to the testing phase, and 71 were dedicated to the validating phase. The dataset distribution of the total dataset was 70%, 15%, and 15% for training, testing, and validating, respectively. The dataset is gained for the five selected propagation models, where at every altitude step of 5 m, a new dataset gets generated to include PL, RSS, SINR, Th, and R. To note, the altitude is ranging between 10–70 m altitude above the ground.
Table 1 shows a representative sample of the dataset.
Based on the optimization algorithm and the assigned weights, after each step of changing the altitude, the algorithm evaluates the objective function, and checks the results; if it is better than the previous results are changed, if not, the algorithm remains and moves on. This process continues until reaching the maximum altitude or until the mean square error (MSE) convergence is less than a small number, whichever one is first. This process of the proposed NN-RBFN optimization technique will give advantages to the drone reaching a wider area with a strong signal and higher data rate, which collectively enhances the experience of using a drone as an aerial reporter. The simulation environment has been drawn from Souq Okaz, which is a unique tourism tributary in the Kingdom of Saudi Arabia, with an area around 15 km. The importance of this place lies in the location and the wide range of activities (e.g., interactive poetry, competitions, and food and music festivals) [
36].
Figure 6 shows the outline of Souq Okaz, which has been considered as a testbed for the simulation environment. This area is the best example of a short-term, large-scale event that has both open areas and semi-open areas across a wide footprint, where the drone could retrieve videos and pictures quite spectacularly. Therefore, this place has been chosen for three reasons: First, it is one of the well-known destinations that hosts a short-term, large-scale event in the Middle East and North Africa (MENA) region, which attracts many media agents across the region. Second, the diversity of the area region, which can evaluate the performance of the proposed model quite well. Third, there is a low risk of airplane routes near the local airport.
4. Results and Discussion
The simulation has considered 5G multiple-input and multiple-output (5G MIMO) antenna to improve diversity performance of the channel capacity, and thus enhance the reliability of wireless communication via the drone. Further, this consideration would not only contribute effectively to a heterogeneous connection, but also helps in reducing power consumption. Specification of the simulation using 5G MIMO are frequency band = 26 GHz, bandwidth = 20 MHz, Pt = 43 dBm, Gt with diversity = 22 dBi, Gr with diversity = 6 dBi, L = 3 dB, A = 10–70 m (5 m step), and θ = 10°. Clearly, this work considers a high frequency band onboard to give high-performance livestreaming, and multimedia transmission with a high level of data rate. This section provides a description and interpretation of the simulation results. Simulations have been done using MATLAB and 3D Remcom Wireless Insite tools.
Figure 7 shows an aerial view of the simulation environment of Souq Okaz using the 3D Remcom Wireless Insite tool. In our simulation scenario, we have considered the 3D Remcom Wireless Insite tool to produce the initial predictions after entering the map of Souq Okaz. This consideration is based on real features, such as obstacles and other things that could affect signal propagation in different forms (e.g., multipath, shading, reflections, or scattering). This in turn would help the proposed NN-RBFN framework to operate under real conditions. The 3D Remcom Wireless Insite tool took about 41 min to attempt all altitudes from 10 m to 70 m (5 m step) across the five models and provide initial predictions of PL, RSS, SINR, Th, and R. Moreover, the obtained predictions were divided into three matrices for training, test, and validation datasets. To note, as the color moves towards the orange, that means the RSS gets lower, which can be translated as −70 dBm and above. Clearly, the overall RSS are green, which refer to a good level of RSS.
Figure 8 shows the tuning of simulation and tuning parameters using 3D Remcom Wireless Insite tool. To note, eNodeB refers to the transmitter side, which represents the drone in our scenario; while UE refers to ground device or user, which represents the receiver side.
Figure 9,
Figure 10 and
Figure 11 show the predicted results of the PL, RSS, SINR, Th, and R of the five models, where M1, M2, M3, M4, and M5 are acronyms that refer to ITU-R P.529-3 model, Hata-Davidson model, Okumura model, ATG model, and Two-Ray model, respectively. To note, all the predictions in
Figure 9,
Figure 10 and
Figure 11 are considered at an altitude of 30 m based on the optimization step, where predictions have given best results at that altitude on real features of Souq Okaz.
Figure 9 illustrates the RSS predicted results of the five models. As can be seen, the RSS mathematically depends on path loss, so predicted results have similar characteristics of predicting path loss. This parameter is seen as a vital element to monitor channel model performance and coverage range, so wireless signals get weaker as the receiver moves away from the transmitter (the drone in our case). All the five models across various altitudes have produced RSS within the acceptable range and below the threshold, which is 83 dBm, at 1 km coverage footprint. Clearly, these models vary in performance due to their correction factors. Another observation is that RSS rises with distance and/or geomorphology because of multipath. Near large obstacles, e.g., castle, in areas, different models show a clear effect of shadowing and reflection of signals, which is an added supplementary path loss and RSS value as distance is increasing. To enhance the RSS, various parameters such as altitude or transmission power should be increased. However, this could reduce the flight time by 31%. Thus, compromise should be applied.
Figure 10 illustrates the SINR predicted results of the five models. Predicted results show that all SINR values across the five models have been attained within the average of 5 dB and 19 dB across all altitudes from 100 m and upward. SINR values below 5 dB are considered undesirable, whereas above 19 dB are viewed as wasted transmitter power. Such a parameter is commonly seen in wireless communications as a wireless link quality indicator. Clearly, SINR predicted results which show positive correlation with distance R. Another observation is that SINR increases as drone altitude and/or distance increase. Thus, it must be maintained.
Figure 11 illustrates the Th predicted results of the five models. Since this work’s focus is on media and journalism, the throughput is a vital parameter for livestreaming and/or HD multimedia transmission. Predicted results show that all Th values across the five models have been achieved with a high level that ranges from 28 Mb/s to 5 Mb/s. Overall, Two-Ray model (M5) yields the best throughput predicted results, since the model heavily depends on both LoS and NLoS conditions when calculating their link budgets. Therefore, it experiences less effect of shadowing and reflection, as well as delivering better wireless connectivity services. The Th predicted results across all models and environment show that negative correlation with altitudes and/or distance increase. Another observation is that using 5G MIMO antenna with its diversity capacities has helped in enhancing the throughput predictions.
To provide large coverage with better connectivity and less path loss, it is vital to consider the elevation angle when calculating coverage radius for drone communications. This aspect distinguishes the UAVs’ systems in comparison to terrestrial systems, which yield better LoS connectivity, reduced path loss, and extended coverage. As can be seen in
Figure 9,
Figure 10 and
Figure 11, that distance is increasing in corresponding to other link budget parameters. Another observed point is that coverage can be affected by transmitter antenna specifications (e.g., altitude, gains, and frequency), as well as geomorphology due to multipath, shading, reflections, and scattering, which is quite acceptable for any space-based systems like UAV.
Overall, the simulated propagation models and their generated predicted results of the full range of link budget parameters has been carried out to monitor system performance, network planning, and coverage to achieve perfect reception of the five selected propagation models. Several factors are observed in the overall performance of these propagation models when RF signal is propagating to a maximum distance. These factors are terrain, frequency, and transmitter and receiver antennae heights’ system performance and coverage.
The rest of this section presents the results of the proposed NN-RBFN framework as can be seen from
Figure 12,
Figure 13 and
Figure 14. The framework aims to optimize a propagation channel model for UAV using the proposed framework to enhance aerial media missions. The NN-RBFN network get inputs from the previous step of predicted results as can be seen from
Figure 9,
Figure 10 and
Figure 11 above, where these data have been divided into training, test, and validation datasets.
Figure 12 displays the training process that lasts for 42 iterations, during which error rates are not reduced. However, at the 43 iterations, training stops as the error rate increases. The obtained results of the proposed NN-RBFN framework seem rational since there is no considerable overfitting which has occurred by iteration 43, the final Mean Square Error (MSE) is small, and the test set error and the validation set error have comparable features. The performance plot shows the MSE dynamics for all datasets in logarithmic scale. Further, the result is fitting and reasonable due to the ultimate MSE being small; besides, the NN-RBFN converges and cuts off training once the error rate becomes constant after a set number of iterations.
Figure 13 displays a three-layer training performance of the proposed NN-RBFN framework using the backpropagation gradient on each iteration in logarithmic scale. Therefore, at each iteration, both the weights and biases become updated. Monitoring the value of gradient coefficient, as well as the value of mu are substantial to indicate the performance of the network. Further, mu is an adaptation parameter that is used in the Levenberg optimization to train the NN-RBFN when calculating and updating the parameters. The Mu value ranges between 0 and 1, where at the gradient coefficient and mu lowest minimum levels, this means better training and testing of the NN-RBFN network. However, validation checks denote the number of consecutive epochs, where the validation value collapses to decrease. Training stops when the validation parameter reaches the highest number of validations of 6 at epoch 49 with the lowermost gradient coefficient and Mu values. Inclusive performance displays that quite accurate predictions have been attained, that is because there is no overfitting happening before its best validation performance happens.
Figure 14 displays that regression plots targets against training, validation, and test sets. It is widely known that data should tumble along 45 degrees, where the outputs are equal to the targets to accomplish the seamless fit. Targets refer to the ratio among the seamless result and the actual outputs. The solid lines denote the finest fit between targets and outputs, which are called “R value”. The dashed lines denote the targets. For this NN, the fit is practically good for most of the data sets, with R-values in our case at 0.99, being very close to 1. Overall, the R-values are satisfactory and represent the best levels of fitness.
Figure 12,
Figure 13 and
Figure 14 confirm that the proposed NN-RBFN framework display a satisfactory level of performance, where it comes not only in terms of training, testing, and validating the data, but also in terms of giving more details about the best propagation model at which altitude suits the selected area. Therefore, at 30 m altitude of the drone, the five models give a reasonable performance based on the outcomes of the proposed model with its assigned weights of the parameters. Moreover, the NN-RBFN helps in selecting the propagation model that guarantees a robust channel with high data rate, and a large cover footprint without requiring a lot of transmission power: this model is the ATG model. Unsurprisingly, this propagation model is reportedly preferred for UAVs, since it uses a closed-form method between a UAV and terrestrial receivers based on LoS and NLoS conditions.
Table 2 summarizes the outcome of the NN-RBFN framework in terms of the five models and the link budget parameters along with their assigned weights. Clearly, out of the five models, we can see model number 5 shows noticeably the best overall performance. This is because the Two-Ray model (M5) has the advantage of high accuracy performance due to its precise correction factors at such low altitudes; besides its inclusion of the elevation angle in calculating the coverage radius instead of the traditional method, which leads to better wireless connectivity. The overall results of the best model indicate reasonable improvements that would help in livestreaming, HD aerial imaging, as well as a reduction in the required transmission power, hence, increasing network lifetime.
Complexity analysis is presented here to analyze the execution time of the proposed NN-RBFN framework against Particle Swarm Optimization (PSO) and Self Organizing Map (SOM) optimization approaches. A Big O mathematical notation is used for the complexity analysis which describes the limiting behavior of a method when the argument tends towards a particular value or infinity.
Figure 15 shows the level of complexity of the proposed NN-RBFN against PSO and SOM optimization approaches. Clearly, we can see the exponential increase in time when the input size rises. The overall time complexity of the proposed NN-RBFN framework shows the lowest level in comparison to other optimization approaches, due to applying minimax technique to reach a local optimal. A further observed point is that the key benefit of decision tree classifier in the proposed NN-RBFN framework has the merit of breaking down a complicated construct into a collection of simpler constructs; hence offering a solution that is straightforward to interpret.
5. Conclusions
Drones and AI are seen as vital pillars of the 4IR that serve many smart applications including smart aerial journalism. To the best of our knowledge, this is the first work that considers an optimized propagation model that integrates both drone and AI to empower smart journalism, and make it a more sustainable and eco-efficient process. This has been done by utilizing a NN-RBFN framework to train the neural network to obtain an accurate channel propagation model to deliver robust aerial media missions, such as: investigative reporting (e.g., humanitarian crises), footage of news events (e.g., man-made and/or natural disasters), or even more livestreaming of short-term, large-scale events (e.g., Olympic Games). To obtain novelty and make a noticeable shift from existing work, there are several key contributions of this work: (1) Testing and evaluating set propagation models, which are representatives of their types from an aerial perspective using NN-RBFN approach; (2) The optimized propagation model would exhibit advantages of accuracy, strong connectivity, and wide media coverage; (3) Validating obtained results against other well-known optimized propagation models as proof-of-concept using 3D Remcom Wireless Insite tools.
The simulation has considered 5G MIMO antenna to improve diversity performance of the channel capacity, and thus enhance the reliability of wireless communication via the drone and reducing power consumption. Simulations have been done using MATLAB, and for validation, it uses 3D Remcom Wireless Insite tools on Souq Okaz for proof-of-concept. The simulated work shows that the proposed framework gives a satisfactory result, which reflects the usefulness of such an integration for aerial journalism. Furthermore, journalists see it as a safer and cost-efficient means of reporting and recording missions, especially in highly vulnerable coverage in hard-to-reach zones and/or short-term, large-scale events. As future work, this concept can be developed further by implementing this concept in real scenarios and then comparing simulated scenarios against experimental results.



















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}