
Simulation-Based Comparison of PID with Sliding Mode Controller for Matrix-Converter-Based Dynamic Voltage Restorer under Variation of System Parameters to Alleviate the Voltage Sag in Distribution System

Abstract
:1. Introduction
2. Dynamic Voltage Restorer
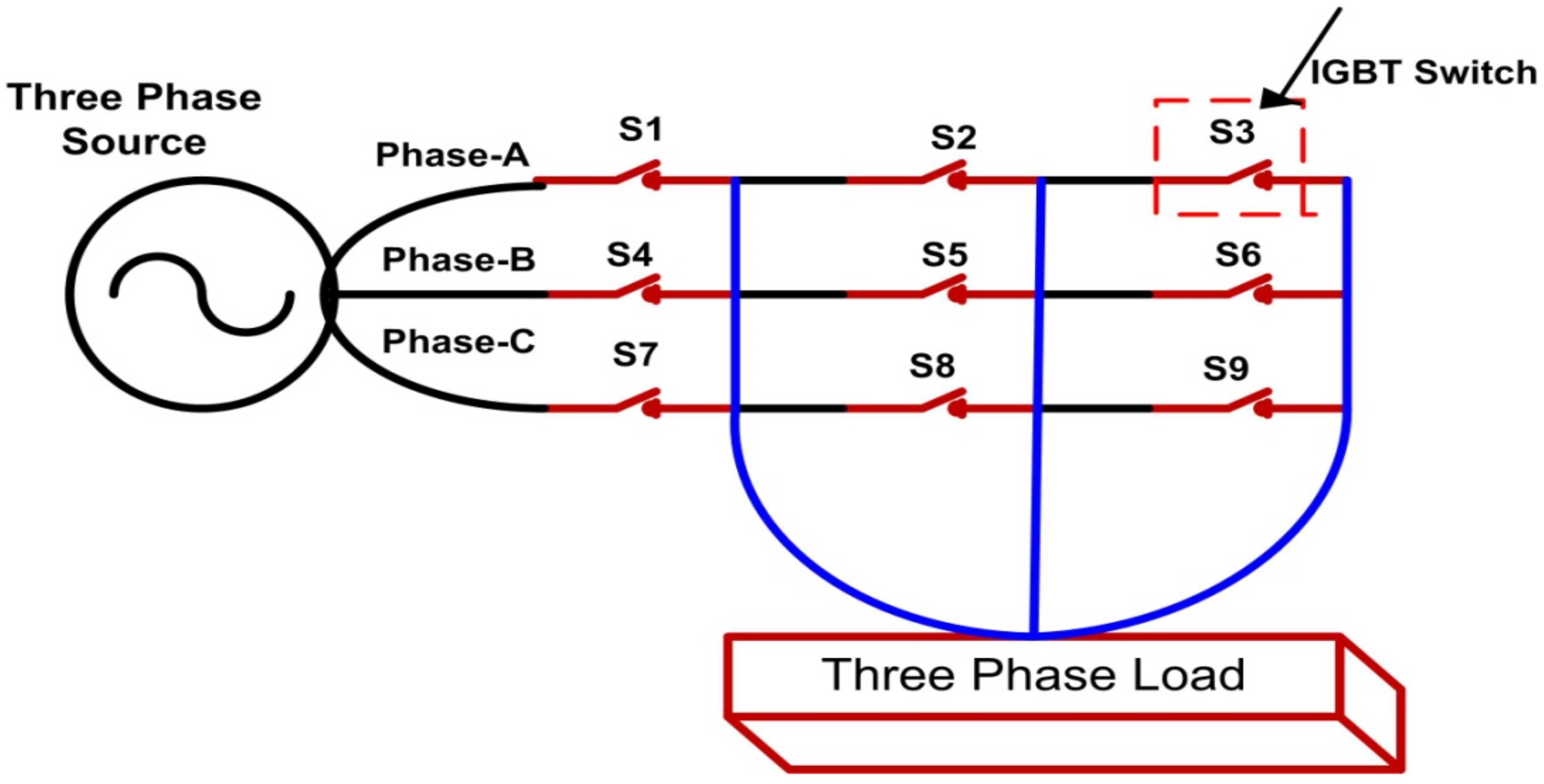
2.1. Matrix Converter
2.2. Park Transformation
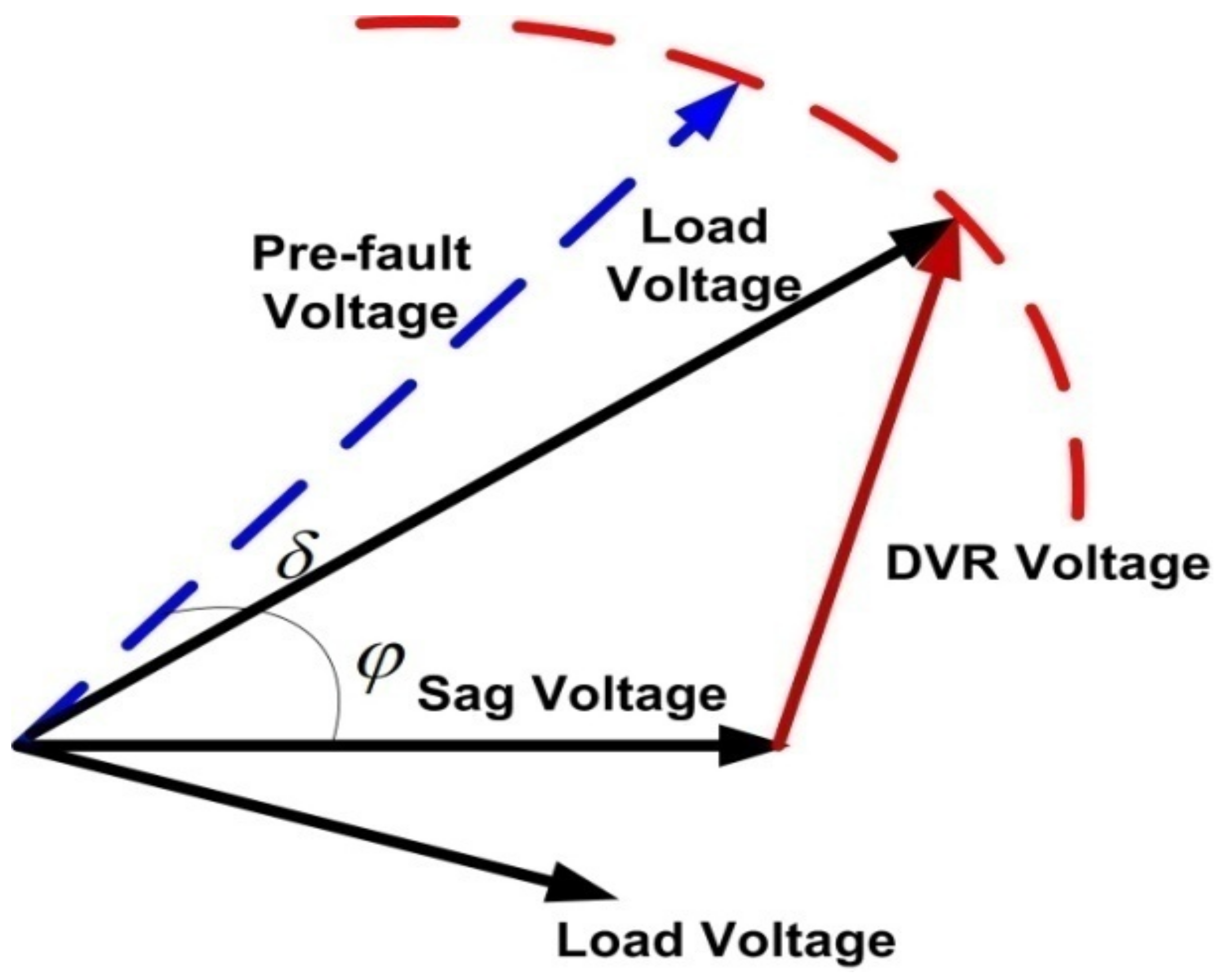
2.3. Voltage Injection Technique
- is the injection voltage.
- is the pre-sag voltage.
- is the supply voltage.
- is the load voltage.
3. Control Circuit for DVR Topology
4. Ant Colony Algorithm
4.1. Cost Function
4.2. Parameters for ACO
4.3. Parameters of Controller Gains
5. Proposed Power System with Simulation Results
5.1. MATLAB Simulation Results
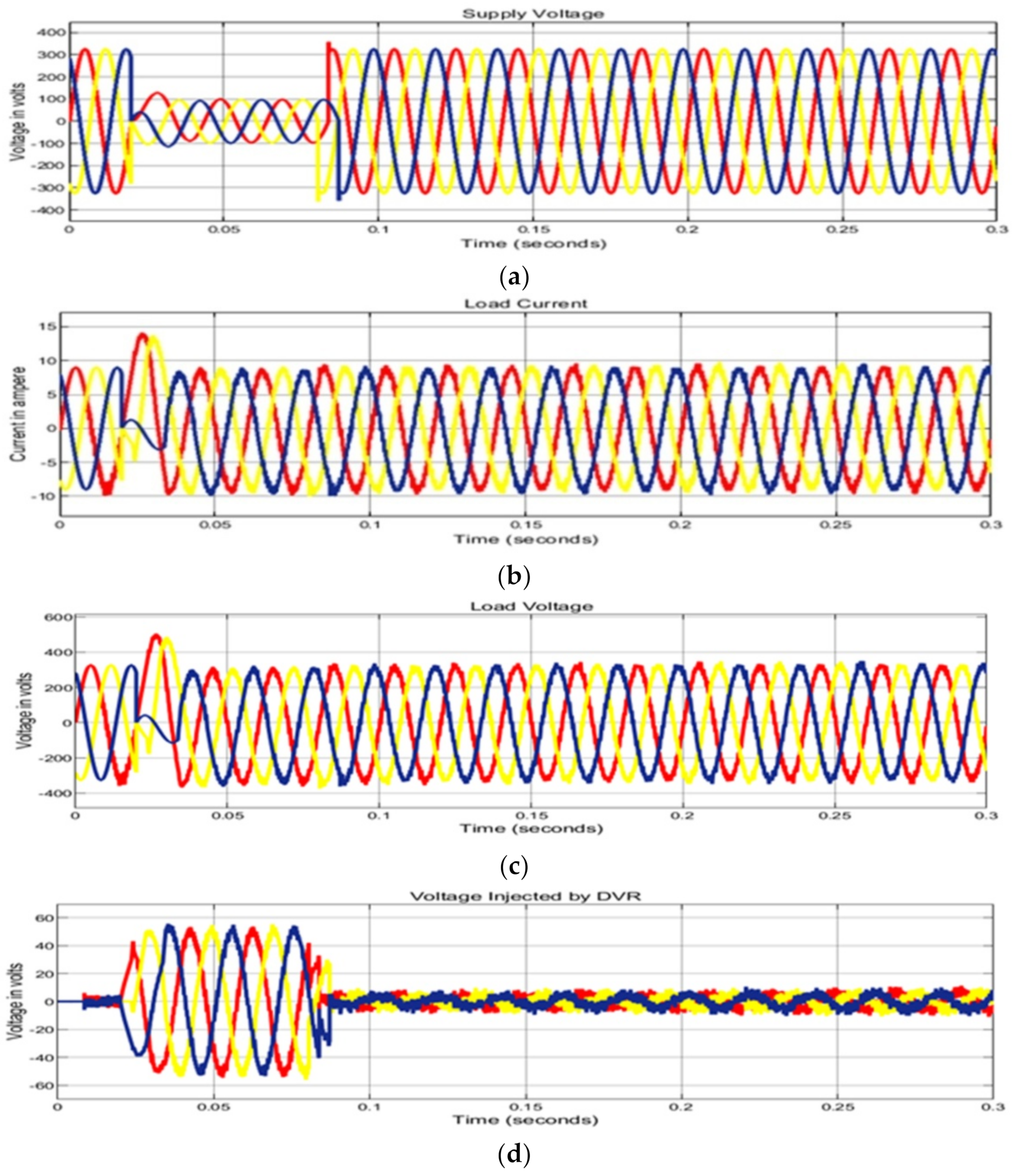
5.1.1. Case1: Three Phase-to-Ground Fault with PID Controller
5.1.2. Case2: Double Line-to-Ground Faults with PID Controller
5.1.3. Case3: Three Phase-to-Ground faults with SMC Controller
5.1.4. Case4: Double Line-to -Ground fault with SMC Controller
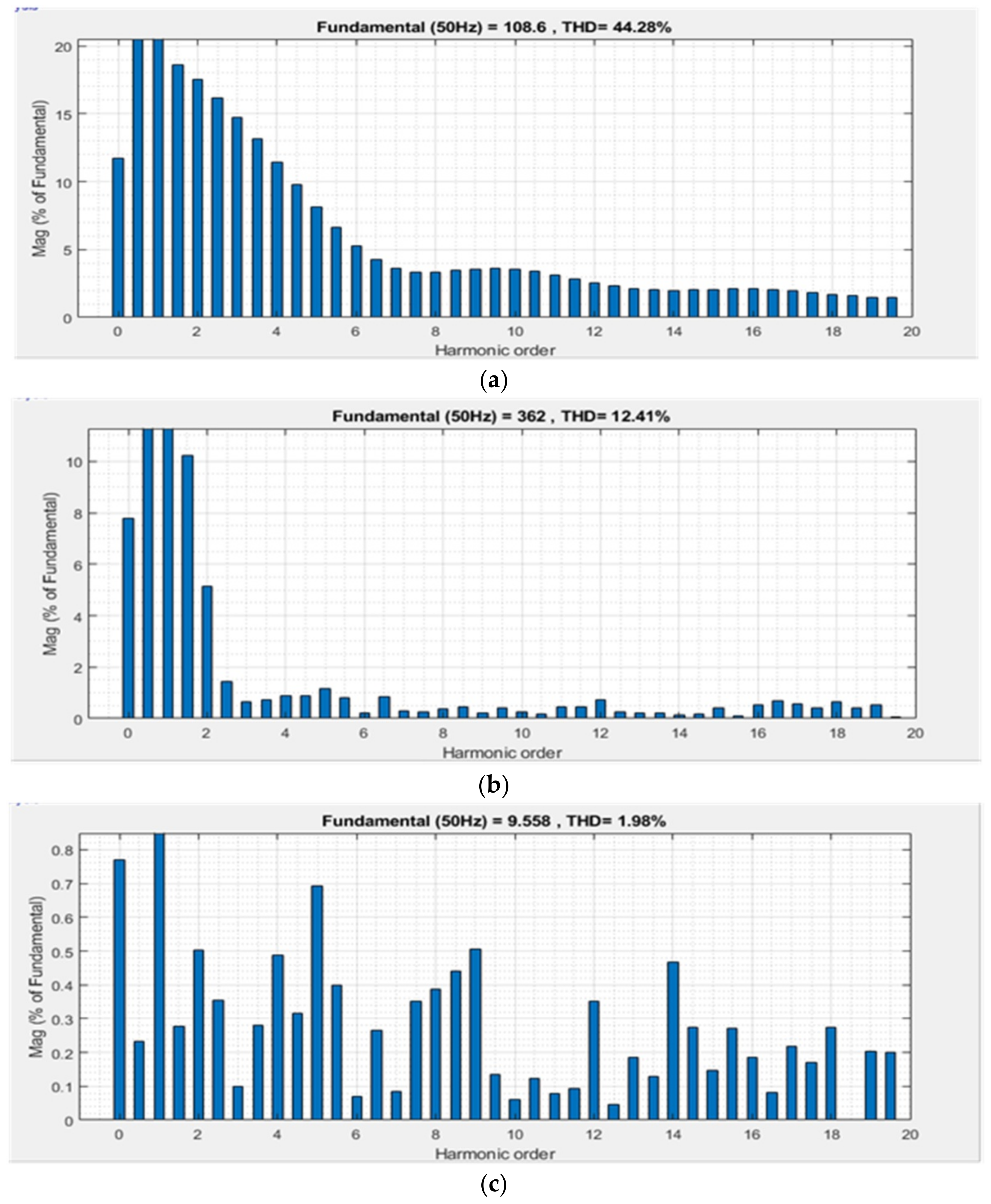
6. Total Harmonic Distortion (THD%)
7. Discussion
8. Conclusions
Author Contributions
Funding
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Farooqi, A.; Othman, M.M.; Radzi, M.A.M.; Musirin, I.; Noor, S.Z.M.; Abidin, I.Z. Dynamic voltage restorer (DVR) enhancement in power quality mitigation with an adverse impact of unsymmetrical faults. Energy Rep. 2022, 8, 871–882. [Google Scholar] [CrossRef]
- Patel, N.; Gandhi, K.; Mahida, D.; Chudasama, P. A review on power quality issues and standards. Int. Res. J. Eng. Technol. 2017, 4, 247–250. [Google Scholar]
- Adware, R.; Chandrakar, V. Comprehensive Analysis of STATCOM with SVC for Power Quality Improvement in Multi Machine Power System. In Proceedings of the 2022 2nd International Conference on Power Electronics & IoT Applications in Renewable Energy and Its Control (PARC), Mathura, India, 21–22 January 2022; pp. 1–5. [Google Scholar]
- Soomro, A.H.; Larik, A.S.; Mahar, M.A.; Sahito, A.A.; Soomro, A.M.; Kaloi, G.S. Dynamic Voltage Restorer—A comprehensive review. Energy Rep. 2021, 7, 6786–6805. [Google Scholar] [CrossRef]
- Tang, L.; Han, Y.; Yang, P.; Wang, C.; Zalhaf, A.S. A review of voltage sag control measures and equipment in power systems. Energy Rep. 2022, 8, 207–216. [Google Scholar] [CrossRef]
- Hassanein, W.S.; Ahmed, M.M.; el-Raouf, M.O.a.; Ashmawy, M.G.; Mosaad, M.I. Performance improvement of off-grid hybrid renewable energy system using dynamic voltage restorer. Alex. Eng. J. 2020, 53, 1567–1581. [Google Scholar] [CrossRef]
- Zahra, S.T.; Khan, R.U.; Ullah, M.F.; Begum, B.; Anwar, N. Simulation-based analysis of dynamic voltage restorer with sliding mode controller at optimal voltage for power quality enhancement in distribution system. Electr. Eng. Electromech. 2022, 1, 64–69. [Google Scholar] [CrossRef]
- Pattanaik, B.; Hussain, S.M.; Karthikeyan, V.; Samuel, G.G. Energy storage system with dynamic voltage restorer integrated for wind energy system. J. Phys. Conf. Ser. 2021, 1964, 042098. [Google Scholar]
- Zhan, C.; Ramachandaramurthy, V.K.; Arulampalam, A.; Fitzer, C.; Kromlidis, S.; Bames, M.; Jenkins, N. Two electrical models of the lead–acid battery used in a dynamic voltage restorer. IEE Proc. Gener. Transm. Distrib. 2003, 150, 175–182. [Google Scholar] [CrossRef]
- Khanday, S.A.; Sekhar, O.C.; Mir, T.N. Comparative Study of Three Phase AC/AC In-direct Matrix Converters: A Review. In Proceedings of the 2022 International Conference for Advancement in Technology (ICONAT), Goa, India, 21–22 January 2022; pp. 1–6. [Google Scholar]
- Diaz, M.; Cardenas, R.; Espinoza, M.; Rojas, F.; Mora, A.; Clare, J.C.; Wheeler, P. An overview of applications of the modular multilevel matrix converter. Energies 2020, 13, 5546. [Google Scholar] [CrossRef]
- Lozano, J.M.; Ramirez, J.M.; Correa, R.E. A novel dynamic voltage restorer based on matrix converters. In Proceedings of the 2010 Modern Electric Power Systems, Wroclaw, Poland, 20–22 September 2010; pp. 1–7. [Google Scholar]
- Ramasamy, M.; Thangavel, S. Experimental verification of PV based dynamic voltage restorer (PV-DVR) with significant energy conservation. Int. J. Electr. Power Energy Syst. 2013, 49, 296–307. [Google Scholar] [CrossRef]
- Rosli, E.; Mustapa, R.; Hidayat, M.; Noor, S.M.; Hamzah, N. Modeling and analysis of applying single phase matrix converter in dynamic voltage restorer. In Proceedings of the 2013 IEEE 7th International Power Engineering and Optimization Conference (PEOCO), Langkawi, Malaysia, 3–4 June 2013; pp. 523–528. [Google Scholar]
- Yi, T.Q.; Kasilingam, G.; Raguraman, R. Effect of PID power system stabilizer for a synchronous machine in simulink environment. In Proceedings of the IOP Conference Series: Earth and Environmental Science, Putrajaya, Malaysia, 5–6 March 2013; p. 012025. [Google Scholar]
- Nasrollahi, R.; Farahani, H.F.; Asadi, M.; Farhadi-Kangarlu, M. Sliding mode control of a dynamic voltage restorer based on PWM AC chopper in three-phase three-wire systems. Int. J. Electr. Power Energy Syst. 2022, 134, 107480. [Google Scholar] [CrossRef]
- Zhang, J.; Li, L.; Dorrell, D.G. Control and applications of direct matrix converters: A review. Chin. J. Electr. Eng. 2018, 4, 18–27. [Google Scholar]
- Jensi, R.; Jiji, G.W. An enhanced particle swarm optimization with levy flight for global optimization. Appl. Soft Comput. 2016, 43, 248–261. [Google Scholar] [CrossRef]
- Duan, H.-b.; Wang, D.-b.; Yu, X.-f. Novel approach to nonlinear PID parameter optimization using ant colony optimization algorithm. J. Bionic Eng. 2006, 3, 73–78. [Google Scholar] [CrossRef]
- Hang, C.C.; Åström, K.J.; Ho, W.K. Refinements of the Ziegler–Nichols tuning formula. IIEE Proc. D Control. Theory Appl. 1991, 138, 111–118. [Google Scholar] [CrossRef]
- Shah, P.; Agashe, S. Review of fractional PID controller. Mechatronics 2016, 38, 29–41. [Google Scholar] [CrossRef]
- Jaleel, J.A.; Thanvy, N. A comparative study between PI, PD, PID and lead-lag controllers for power system stabilizer. In Proceedings of the 2013 International Conference on Circuits, Power and Computing Technologies (ICCPCT), Nagercoil, India, 20–21 March 2013; pp. 456–460. [Google Scholar]
- Arunraja, A.; Jayanthy, S. Tuning methods of various controllers. Mater. Today Proc. 2021. [Google Scholar] [CrossRef]
- Sundarabalan, C.; Selvi, K. Compensation of voltage disturbances using PEMFC supported Dynamic Voltage Restorer. Int. J. Electr. Power Energy Syst. 2015, 71, 77–92. [Google Scholar] [CrossRef]
- Kassarwani, N.; Ohri, J.; Singh, A. Performance analysis of dynamic voltage restorer using improved PSO technique. Int. J. Electron. 2019, 106, 212–236. [Google Scholar] [CrossRef]
- Zhou, Y.T.; Nie, J.B.; Han, N.; Chen, C.; Yue, Z.F. Study on PID parameters tuning based on particle swarm optimization. In Advanced Materials Research; Trans Tech Publications Ltd.: Zurich, Switzerland, 2013; pp. 432–438. [Google Scholar]
- Soon, C.C.; Ghazali, R.; Jaafar, H.I.; Hussien, S.Y.S. Sliding mode controller design with optimized PID sliding surface using particle swarm algorithm. Procedia Comput. Sci. 2017, 105, 235–239. [Google Scholar] [CrossRef]
- Benachaiba, C.; Mazari, B.; Tandjaoui, M.; Haidar, A. Power quality enhancement using DVR based on ant colony controller. In Proceedings of the 2016 57th International Scientific Conference on Power and Electrical Engineering of Riga Technical University (RTUCON), Riga, Latvia, 13–14 October 2016; pp. 1–4. [Google Scholar]
- Bristow, D.A.; Tharayil, M.; Alleyne, A.G. A survey of iterative learning control. IEEE Control. Syst. Mag. 2006, 26, 96–114. [Google Scholar]
- Dorigo, M.; Birattari, M.; Stutzle, T. Ant colony optimization. IEEE Comput. Intell. Mag. 2006, 1, 28–39. [Google Scholar] [CrossRef]
- Omar, R.; Rahim, N. Implementation and control of a dynamic voltage restorer using Space Vector Pulse Width Modulation (SVPWM) for voltage sag mitigation. In Proceedings of the 2009 International Conference for Technical Postgraduates (TECHPOS), Kuala Lumpur, Malaysia, 14–15 December 2009; pp. 1–6. [Google Scholar]
- Helle, L.; Larsen, K.B.; Jorgensen, A.H.; Munk-Nielsen, S.; Blaabjerg, F. Evaluation of modulation schemes for three-phase to three-phase matrix converters. IEEE Trans. Ind. Electron. 2004, 51, 158–171. [Google Scholar] [CrossRef]
- Casadei, D.; Serra, G.; Tani, A.; Zarri, L. Matrix converter modulation strategies: A new general approach based on space-vector representation of the switch state. IEEE Trans. Ind. Electron. 2002, 49, 370–381. [Google Scholar] [CrossRef]
- Li, D.; Wang, T.; Pan, W.; Ding, X.; Gong, J. A comprehensive review of improving power quality using active power filters. Electr. Power Syst. Res. 2021, 199, 107389. [Google Scholar] [CrossRef]
- Malekjamshidi, Z.; Jafari, M.; Zhu, J.; Xiao, D. Bidirectional power flow control with stability analysis of the matrix converter for microgrid applications. Int. J. Electr. Power Energy Syst. 2019, 110, 725–736. [Google Scholar] [CrossRef]
- Merchan-Villalba, L.R.; Lozano-Garcia, J.M.; Avina-Cervantes, J.G.; Estrada-Garcia, H.J.; Pizano-Martinez, A.; Carreno-Meneses, C.A. Linearly decoupled control of a dynamic voltage restorer without energy storage. Mathematics 2020, 8, 1794. [Google Scholar] [CrossRef]
- Faisal, M.; Alam, M.S.; Arafat, M.I.M.; Rahman, M.M.; Mostafa, S.M.G. PI controller and park’s transformation based control of dynamic voltage restorer for voltage sag minimization. In Proceedings of the 2014 9th International Forum on Strategic Technology (IFOST), Cox’s Bazar, Bangladesh, 21–23 October 2014; pp. 276–279. [Google Scholar]
- Chauhan, A.; Thakur, P. Power Quality Issues and Their Impact on the Performance of Industrial Machines; Anchor Academic Publishing: Hamburg, Germany, 2016. [Google Scholar]
- Singh, S.; Mitra, R. Comparative analysis of robustness of optimally offline tuned PID controller and Fuzzy supervised PID controller. In Proceedings of the 2014 Recent Advances in Engineering and Computational Sciences (RAECS), Chandigarh, India, 6–8 March 2014; pp. 1–6. [Google Scholar]
- EAl-Ammar, A.; Ul-Haq, A.; Iqbal, A.; Jalal, M.; Anjum, A. SRF based versatile control technique for DVR to mitigate voltage sag problem in distribution system. Ain Shams Eng. J. 2020, 11, 99–108. [Google Scholar] [CrossRef]
- Biricik, S.; Komurcugil, H.; Tuyen, N.D.; Basu, M. Protection of sensitive loads using sliding mode controlled three-phase DVR with adaptive notch filter. IEEE Trans. Ind. Electron. 2018, 66, 5465–5475. [Google Scholar] [CrossRef]
- Hsiao, Y.-T.; Chuang, C.-L.; Chien, C.-C. Ant colony optimization for designing of PID controllers. In Proceedings of the 2004 IEEE International Conference on Robotics and Automation (IEEE Cat. No. 04CH37508), New Orleans, LA, USA, 2–4 September 2004; pp. 321–326. [Google Scholar]
- Dorigo, M.; Gambardella, L.M. Ant colony system: A cooperative learning approach to the traveling salesman problem. IEEE Trans. Evol. Comput. 1997, 1, 53–66. [Google Scholar] [CrossRef] [Green Version]
- Mohamed, A. Optimization Techniques for Tuning the Controller of a Permanent Magnet Brushless Motor. Master’s Thesis, Helwan University, Helwan, Egypt, 2012. [Google Scholar]













{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| S.No | Parameter | Value |
|---|---|---|
| 1 | Proportional gain | 6.87688 |
| 2 | Integral gain | 0.85085 |
| 3 | Derivative gain | 10 |
| S.No | Parameter | Value |
|---|---|---|
| 1 | Source voltage | 11 KV |
| 2 | Step-down transformer | 11 KV/400 V |
| 3 | Resistance of the line | 0.789 |
| 4 | Inductance of the line | 15.48 × 10−6 |
| 5 | Load (3-phase) | 5 KW |
| 6 | Filter inductance | 4.5 mH |
| 7 | Filter capacitance | 2 µF |
| Parameters | PID Controller | SMC Controller |
|---|---|---|
| Supply voltage | 327v | 327v |
| Sag voltage | 227v | 227v |
| Rise time | 0.025 s | - |
| Settling time | 0.04 s | 0.02 s |
| Overshoot in voltage | 173v | - |
| Overshoot in load current | 5 A | - |
| THD% | 12.41% | 1.98% |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Soomro, A.H.; Larik, A.S.; Mahar, M.A.; Sahito, A.A. Simulation-Based Comparison of PID with Sliding Mode Controller for Matrix-Converter-Based Dynamic Voltage Restorer under Variation of System Parameters to Alleviate the Voltage Sag in Distribution System. Sustainability 2022, 14, 14661. https://doi.org/10.3390/su142114661
Soomro AH, Larik AS, Mahar MA, Sahito AA. Simulation-Based Comparison of PID with Sliding Mode Controller for Matrix-Converter-Based Dynamic Voltage Restorer under Variation of System Parameters to Alleviate the Voltage Sag in Distribution System. Sustainability. 2022; 14(21):14661. https://doi.org/10.3390/su142114661
Chicago/Turabian StyleSoomro, Abdul Hameed, Abdul Sattar Larik, Mukhtiar Ahmed Mahar, and Anwar Ali Sahito. 2022. "Simulation-Based Comparison of PID with Sliding Mode Controller for Matrix-Converter-Based Dynamic Voltage Restorer under Variation of System Parameters to Alleviate the Voltage Sag in Distribution System" Sustainability 14, no. 21: 14661. https://doi.org/10.3390/su142114661