
Adaptive Intelligent Model Predictive Control for Microgrid Load Frequency




Abstract
:1. Introduction
- In [37], a rule-based (lookup table) type-1 fuzzy method has been used, but we use a type-2 fuzzy method with a learning capability (based on training data).
- In [37], only one parameter (control signal weighting coefficient) is estimated (by the fuzzy system), but in our article, the control signal weighting coefficient, the error (between the reference and predicted output) weighting coefficient, the predictor window length, the control window length, the battery source control gain and the flywheel source control gain are estimated and regularly updated.
- The number of power resources in [37] is five cases and the flywheel is not considered, but we consider the flywheel power source to make our work comprehensive.
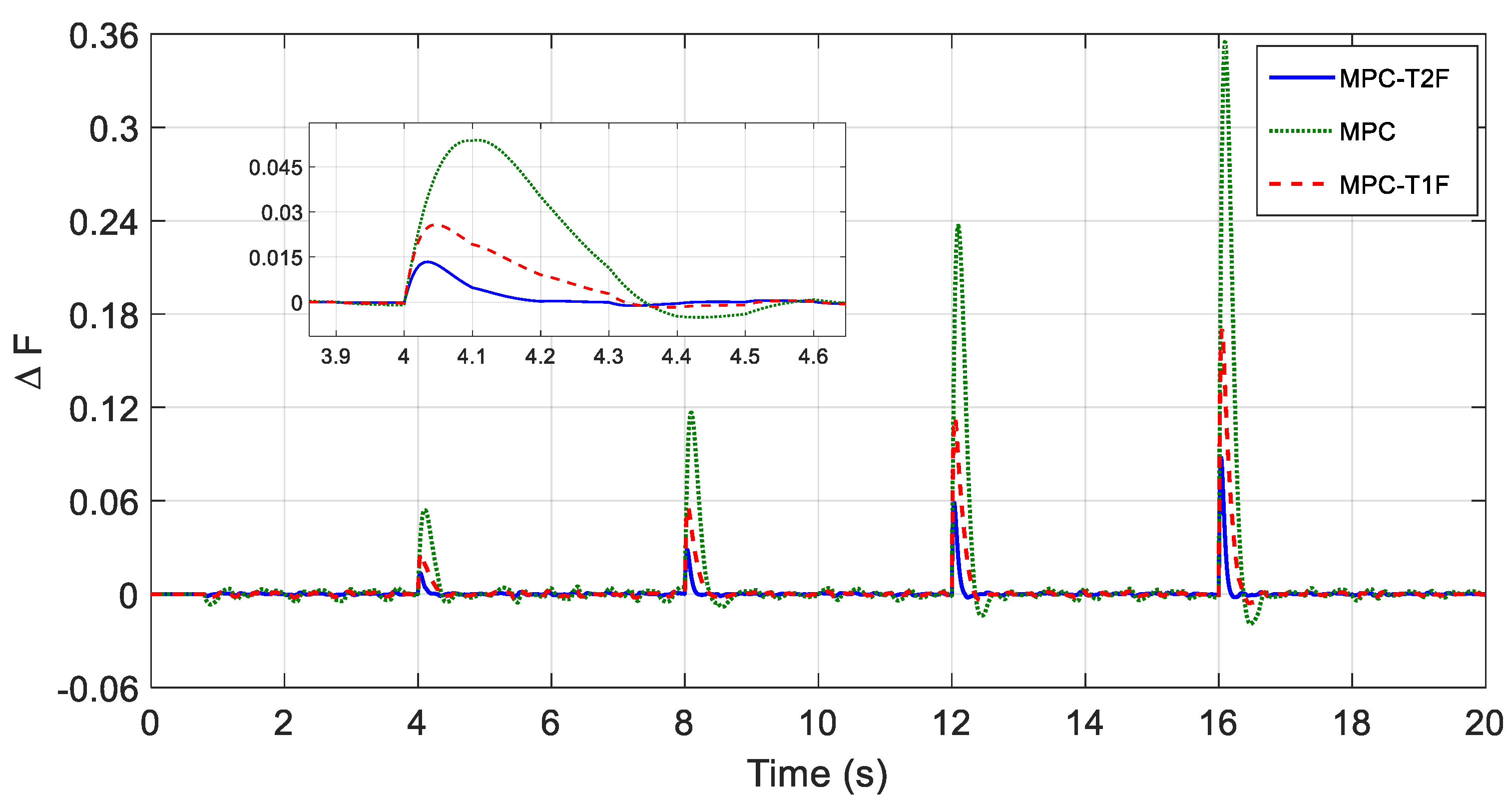
- In order to damp the frequency fluctuations in the microgrid, a new adaptive MPC controller is used.
- A powerful type-2 fuzzy tool is used to estimate the parameters of the control system.
- Uncertainty in all system parameters as well as uncertainty in solar and wind resources is considered.
2. General Structure of Microgrids and Their Control Strategies
2.1. Microgrid Structure
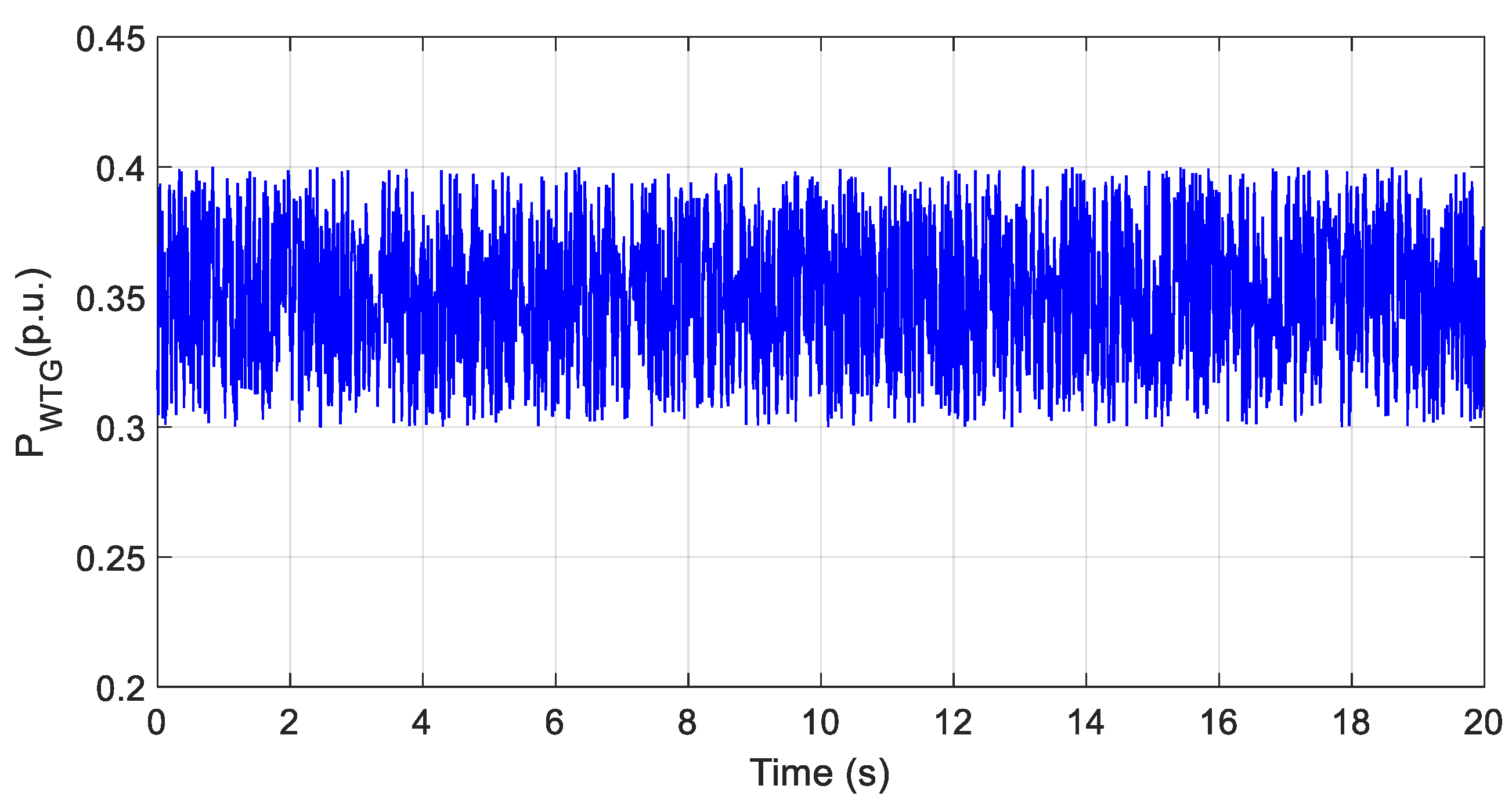
2.1.1. Wind Turbine Generator (WTG)
2.1.2. Photovoltaic (PV)
2.1.3. Diesel Generator (DEG)
2.1.4. Electrolyzer (AE)
2.1.5. Fuel Cell (FC)
2.1.6. Battery Storage System (BESS) and Flywheel (FESS)
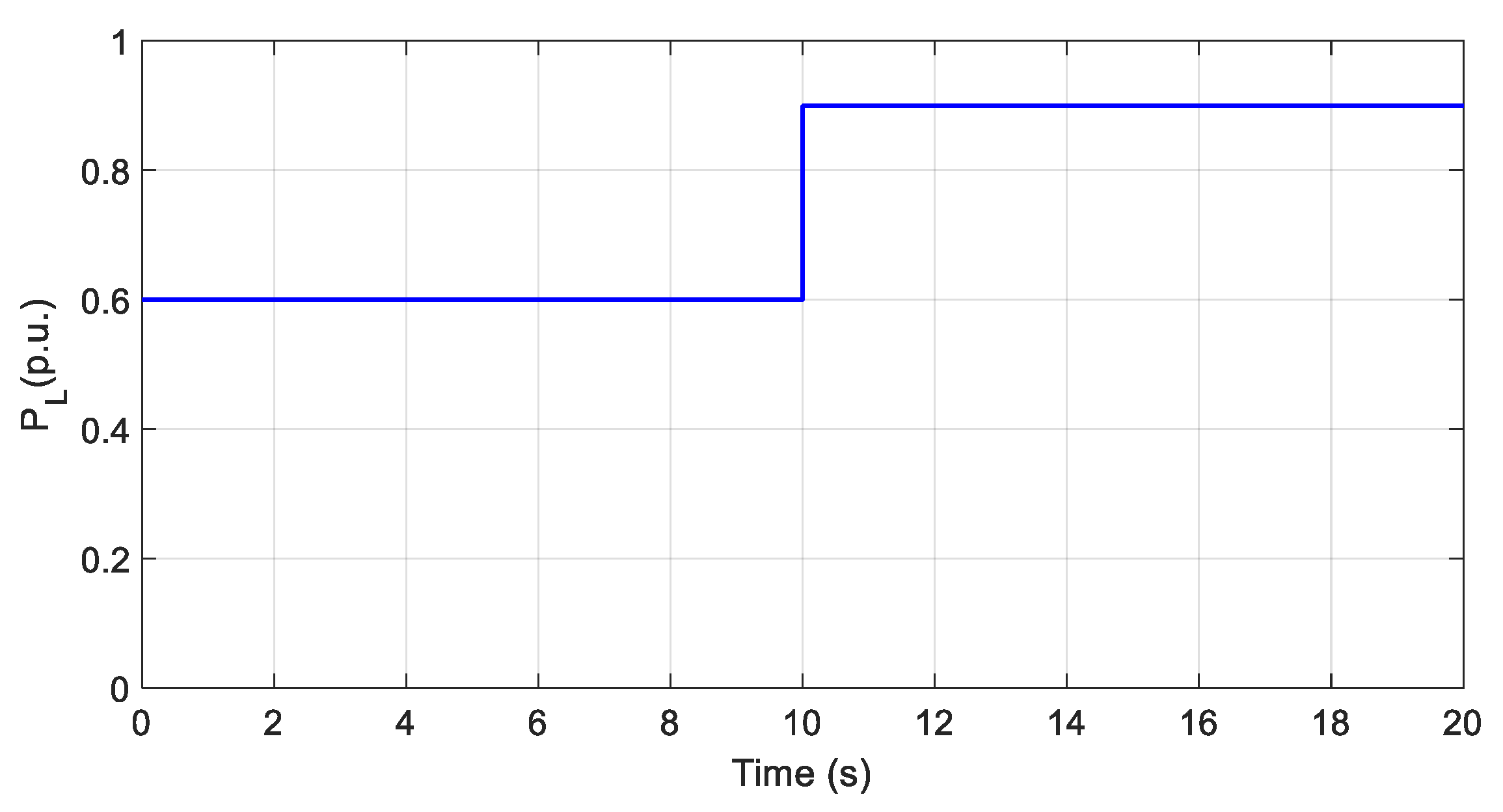
2.1.7. Changes in Frequency and Microgrid Power
2.2. Frequency Control
- Primary Frequency Control (PFC)
- B.
- Secondary Frequency Control (SFC)
3. Model Predictive Control
3.1. General Structure
3.2. Predictive Controller Design
4. Simulation
5. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Alasali, F.; Salameh, M.; Semrin, A.; Nusair, K.; El-Naily, N.; Holderbaum, W. Optimal Controllers and Configurations of 100% PV and Energy Storage Systems for a Microgrid: The Case Study of a Small Town in Jordan. Sustainability 2022, 14, 8124. [Google Scholar] [CrossRef]
- Mohammadi, F.; Mohammadi-ivatloo, B.; Gharehpetian, G.B.; Ali, M.H.; Wei, W.; Erdinç, O.; Shirkhani, M. Robust Control Strategies for Microgrids: A Review. IEEE Syst. J. 2021, 16, 2401–2412. [Google Scholar] [CrossRef]
- Iranmehr, H.; Aazami, R.; Tavoosi, J.; Shirkhani, M.; Azizi, A.; Mohammadzadeh, A.; Mosavi, A.H. Modeling the Price of Emergency Power Transmission Lines in The Reserve Market Due to The Influence of Renewable Resources. Front. Energy Res. 2022, 9. [Google Scholar] [CrossRef]
- Tavoosi, J.; Shirkhani, M.; Azizi, A.; Din, S.U.; Mohammadzadeh, A.; Mobayen, S. A hybrid approach for fault location in power distributed networks: Impedance-based and machine learning technique. Electr. Power Syst. Res. 2022, 210, 108073. [Google Scholar] [CrossRef]
- Wang, H.; Liu, Y.; Fang, J.; He, J.; Tian, Y.; Zhang, H. Emergency sources pre-positioning for resilient restoration of distribution network. Energy Rep. 2020, 6 (Suppl. 9), 1283–1290. [Google Scholar] [CrossRef]
- Aazami, R.; Heydari, O.; Tavoosi, J.; Shirkhani, M.; Mohammadzadeh, A.; Mosavi, A. Optimal Control of an Ener-gy-Storage System in a Microgrid for Reducing Wind-Power Fluctuations. Sustainability 2022, 14, 6183. [Google Scholar] [CrossRef]
- Li, W.; Zhang, M.; Deng, Y. Consensus-Based Distributed Secondary Frequency Control Method for AC Microgrid Using ADRC Technique. Energies 2022, 15, 3184. [Google Scholar] [CrossRef]
- Alayi, R.; Zishan, F.; Seyednouri, S.R.; Kumar, R.; Ahmadi, M.H.; Sharifpur, M. Optimal Load Frequency Control of Island Microgrids via a PID Controller in the Presence of Wind Turbine and PV. Sustainability 2021, 13, 10728. [Google Scholar] [CrossRef]
- Kumar, D.; Mathur, H.D.; Bhanot, S.; Bansal, R.C. Modeling and frequency control of community micro-grids under stochastic solar and wind sources. Eng. Sci. Technol. Int. J. 2020, 23, 1084–1099. [Google Scholar] [CrossRef]
- Lan, Z.; Wang, J.; Zeng, J.; He, D.; Xiao, F.; Jiang, F. Constant Frequency Control Strategy of Microgrids by Coordinating Energy Router and Energy Storage System. Math. Probl. Eng. 2020, 2020, 4976529. [Google Scholar] [CrossRef]
- Al Sumarmad, K.A.; Sulaiman, N.; Wahab, N.I.A.; Hizam, H. Energy Management and Voltage Control in Microgrids Using Artificial Neural Networks, PID, and Fuzzy Logic Controllers. Energies 2022, 15, 303. [Google Scholar] [CrossRef]
- Sohrabzadi, E.; Gheisarnejad, M.; Esfahani, Z.; Khooban, M.H. A novel intelligent ultra-local model control-based type-II fuzzy for frequency regulation of multi-microgrids. Trans. Inst. Meas. Control. 2022, 44, 1134–1148. [Google Scholar] [CrossRef]
- Huang, H.; Shirkhani, M.; Tavoosi, J.; Mahmoud, O. A New Intelligent Dynamic Control Method for a Class of Stochastic Nonlinear Systems. Mathematics 2022, 10, 1406. [Google Scholar] [CrossRef]
- Veronica, A.J.; Kumar, N.S.; Gonzalez-Longatt, F. Design of Load Frequency Control for a Microgrid Using D-partition Method. Int. J. Emerg. Electr. Power Syst. 2020, 21, 20190175. [Google Scholar] [CrossRef]
- Latif, A.; Hussain, S.S.; Das, D.C.; Ustun, T.S.; Iqbal, A. A review on fractional order (FO) controllers’ optimization for load frequency stabilization in power networks. Energy Rep. 2021, 7, 4009–4021. [Google Scholar] [CrossRef]
- Rafiee, A.; Batmani, Y.; Ahmadi, F.; Bevrani, H. Robust Load-Frequency Control in Islanded Microgrids: Virtual Synchronous Generator Concept and Quantitative Feedback Theory. IEEE Trans. Power Syst. 2021, 36, 5408–5416. [Google Scholar] [CrossRef]
- Khokhar, B.; Dahiya, S.; Singh Parmar, K.P. A Robust Cascade Controller for Load Frequency Control of a Standalone Microgrid Incorporating Electric Vehicles. Electr. Power Compon. Syst. 2020, 48, 711–726. [Google Scholar] [CrossRef]
- Tripathi, S.K.; Singh, V.P.; Pandey, A.S. Robust Load Frequency Control of Interconnected Power System in Smart Grid. IETE J. Res. 2021. [Google Scholar] [CrossRef]
- Anuradhika, K.; Dash, P. Genetic Algorithm-Based Load Frequency Control of a Grid-Connected Microgrid in Presence of Electric Vehicles. In Sustainable Energy and Technological Advancements; Panda, G., Naayagi, R.T., Mishra, S., Eds.; Advances in Sustainability Science and Technology; Springer: Singapore, 2022. [Google Scholar] [CrossRef]
- Ramlal, C.J.; Singh, A.; Rocke, S. Repetitive Learning Frequency Control for Energy Intensive Corporate Microgrids subject to Cyclic Batch Loads. In Proceedings of the 2020 IEEE PES Innovative Smart Grid Technologies Europe (ISGT-Europe), The Hague, The Netherlands, 26–28 October 2020; pp. 349–353. [Google Scholar] [CrossRef]
- Saleh-Ahmadi, A.; Moattari, M.; Gahedi, A.; Pouresmaeil, E. Droop Method Development for Microgrids Control Considering Higher Order Sliding Mode Control Approach and Feeder Impedance Variation. Appl. Sci. 2021, 11, 967. [Google Scholar] [CrossRef]
- Keyvani, B.; Fani, B.; Karimi, H.; Moazzami, M.; Shahgholian, G. Improved Droop Control Method for Reactive Power Sharing in Autonomous Microgrids. J. Renew. Energy Environ. 2022, 9, 1–9. [Google Scholar] [CrossRef]
- Qiao, S.; Liu, X.; Xiao, G.; Ge, S.S. Observer-Based Sliding Mode Load Frequency Control of Power Systems under Deception Attack. Complexity 2021, 2021, 8092206. [Google Scholar] [CrossRef]
- Mishra, D.; Nayak, P.C.; Prusty, R.C. PSO optimized PIDF controller for Load-frequency control of A.C Multi-Islanded-Micro grid system. In Proceedings of the International Conference on Renewable Energy Integration into Smart Grids: A Multidisciplinary Approach to Technology Modelling and Simulation (ICREISG), Bhubaneswar, India, 14–15 February 2020; pp. 116–121. [Google Scholar] [CrossRef]
- El-Fergany, A.A.; El-Hameed, M.A. Efficient frequency controllers for autonomous two-area hybrid microgrid system using social-spider optimiser. IET Gener. Transm. Distrib. 2017, 11, 637–648. [Google Scholar] [CrossRef]
- Ibrahim, A.N.A.A.; Shafei, M.A.R.; Ibrahim, D.K. Linearized biogeography based optimization tuned PID-P controller for load frequency control of interconnected power system. In Proceedings of the Nineteenth International Middle East Power Systems Conference (MEPCON), Cairo, Egypt, 19–21 December 2017; pp. 1081–1087. [Google Scholar] [CrossRef]
- Shafei, M.A.R.; Ibrahim, D.K.; Bahaa, M. Application of PSO tuned fuzzy logic controller for LFC of two-area power system with redox flow battery and PV solar park. Ain Shams Eng. J. 2022, 13, 101710. [Google Scholar] [CrossRef]
- Jeyalakshmi, V.; Subburaj, P. PSO-scaled fuzzy logic to load frequency control in hydrothermal power system. Soft Comput. 2016, 20, 2577–2594. [Google Scholar] [CrossRef]
- Rawat, S.; Jha, B.; Panda, M.K.; Kanti, J. Interval Type-2 Fuzzy Logic Control-Based Frequency Control of Hybrid Power System Using DMGS of PI Controller. Appl. Sci. 2021, 11, 10217. [Google Scholar] [CrossRef]
- Sahu, P.C.; Mishra, S.; Prusty, R.C.; Panda, S. Improved-salp swarm optimized type-II fuzzy controller in load frequency control of multi area islanded AC microgrid. Sustain. Energy Grids Netw. 2018, 16, 380–392. [Google Scholar] [CrossRef]
- Li, L.; Li, H.; Tseng, M.-L.; Feng, H.; Chiu, A.S.F. Renewable Energy System on Frequency Stability Control Strategy Using Virtual Synchronous Generator. Symmetry 2020, 12, 1697. [Google Scholar] [CrossRef]
- Cao, Y.; Mohammadzadeh, A.; Tavoosi, J.; Mobayen, S.; Safdar, R.; Fekih, A. A new predictive energy management system: Deep learned type-2 fuzzy system based on singular value decommission. Energy Rep. 2022, 8, 722–734. [Google Scholar] [CrossRef]
- Garcia-Torres, F.; Vazquez, S.; Moreno-Garcia, I.M.; Gil-de-Castro, A.; Roncero-Sanchez, P.; Moreno-Munoz, A. Microgrids Power Quality Enhancement Using Model Predictive Control. Electronics 2021, 10, 328. [Google Scholar] [CrossRef]
- Tavoosi, J.; Shirkhani, M.; Abdali, A.; Mohammadzadeh, A.; Nazari, M.; Mobayen, S.; Asad, J.H.; Bartoszewicz, A. A New General Type-2 Fuzzy Predictive Scheme for PID Tuning. Appl. Sci. 2021, 11, 10392. [Google Scholar] [CrossRef]
- Hasan, N.; Alsaidan, I.; Sajid, M.; Khatoon, S.; Farooq, S. Hybrid MPC-Based Automatic Generation Control for Dominant Wind Energy Penetrated Multisource Power System. Model. Simul. Eng. 2022, 2020, 5526827. [Google Scholar] [CrossRef]
- Sayedi, I.; Fatehi, M.H.; Simab, M. Optimal Load Distribution in DG Sources Using Model Predictive Control and the State Feedback Controller for Switching Control. Int. Trans. Electr. Energy Syst. 2022, 2022, 5423532. [Google Scholar] [CrossRef]
- Kayalvizhi, S.; Kumar, D.M.V. Load Frequency Control of an Isolated Micro Grid Using Fuzzy Adaptive Model Predictive Control. IEEE Access 2017, 5, 16241–16251. [Google Scholar] [CrossRef]













{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameter | Value | Parameter | Value |
|---|---|---|---|
| (p.u./Hz) | 0.012 | 0.6 | |
| 0.1 | −0.01 | ||
| 0.1 | −0.003 | ||
| 4 | 0.01 | ||
| 0.5 | 0.002 | ||
| (s) | 1.8 | 1 | |
| 1.5 | 1 | ||
| 2 | 0.003 | ||
| (p.u.s) | (Hz/p.u.) | 3 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Zhao, D.; Sun, S.; Mohammadzadeh, A.; Mosavi, A. Adaptive Intelligent Model Predictive Control for Microgrid Load Frequency. Sustainability 2022, 14, 11772. https://doi.org/10.3390/su141811772
Zhao D, Sun S, Mohammadzadeh A, Mosavi A. Adaptive Intelligent Model Predictive Control for Microgrid Load Frequency. Sustainability. 2022; 14(18):11772. https://doi.org/10.3390/su141811772
Chicago/Turabian StyleZhao, Dong, Shuyan Sun, Ardashir Mohammadzadeh, and Amir Mosavi. 2022. "Adaptive Intelligent Model Predictive Control for Microgrid Load Frequency" Sustainability 14, no. 18: 11772. https://doi.org/10.3390/su141811772