
Powertrain Design and Energy Management Strategy Optimization for a Fuel Cell Electric Intercity Coach in an Extremely Cold Mountain Area
Abstract
:1. Introduction
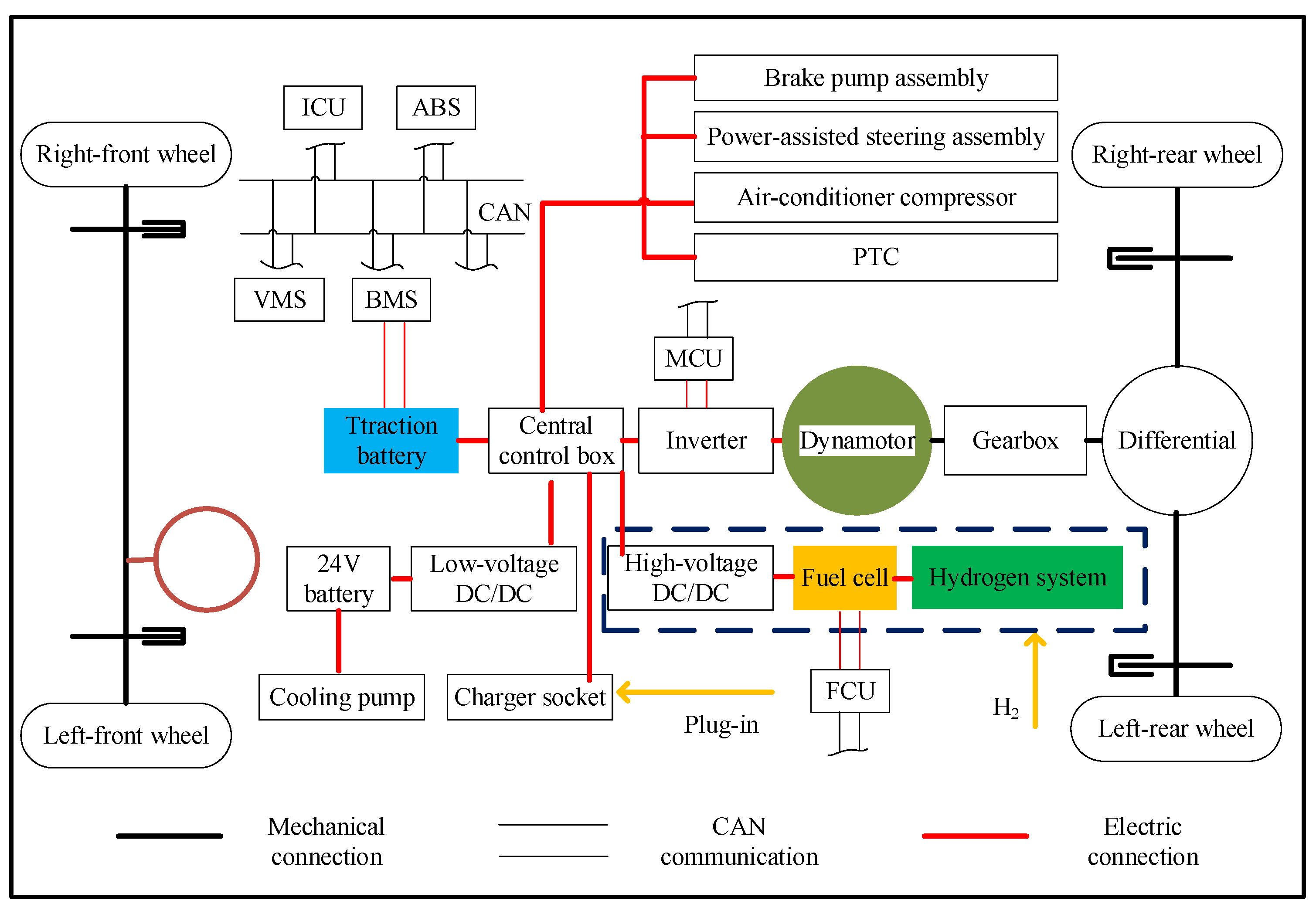
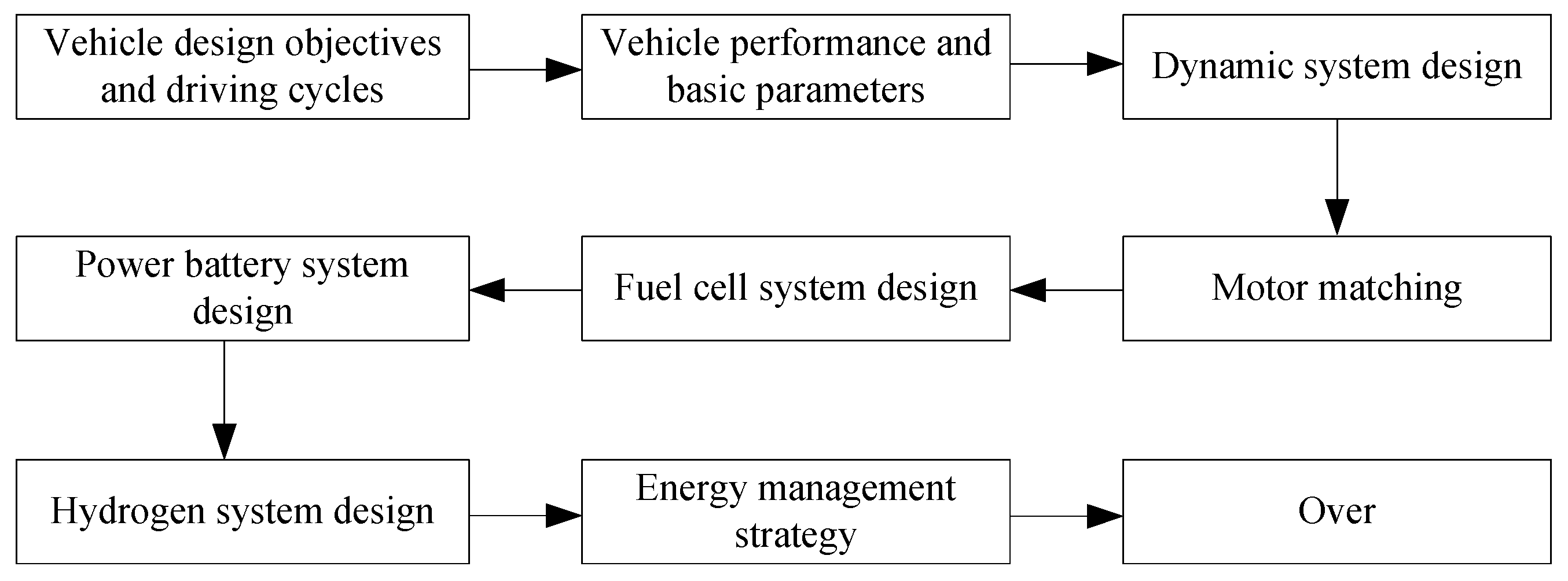
2. Integrated Design of Powertrain System
2.1. Selection and Matching
2.1.1. Drive Motor System
2.1.2. FC System
2.1.3. Traction Battery System
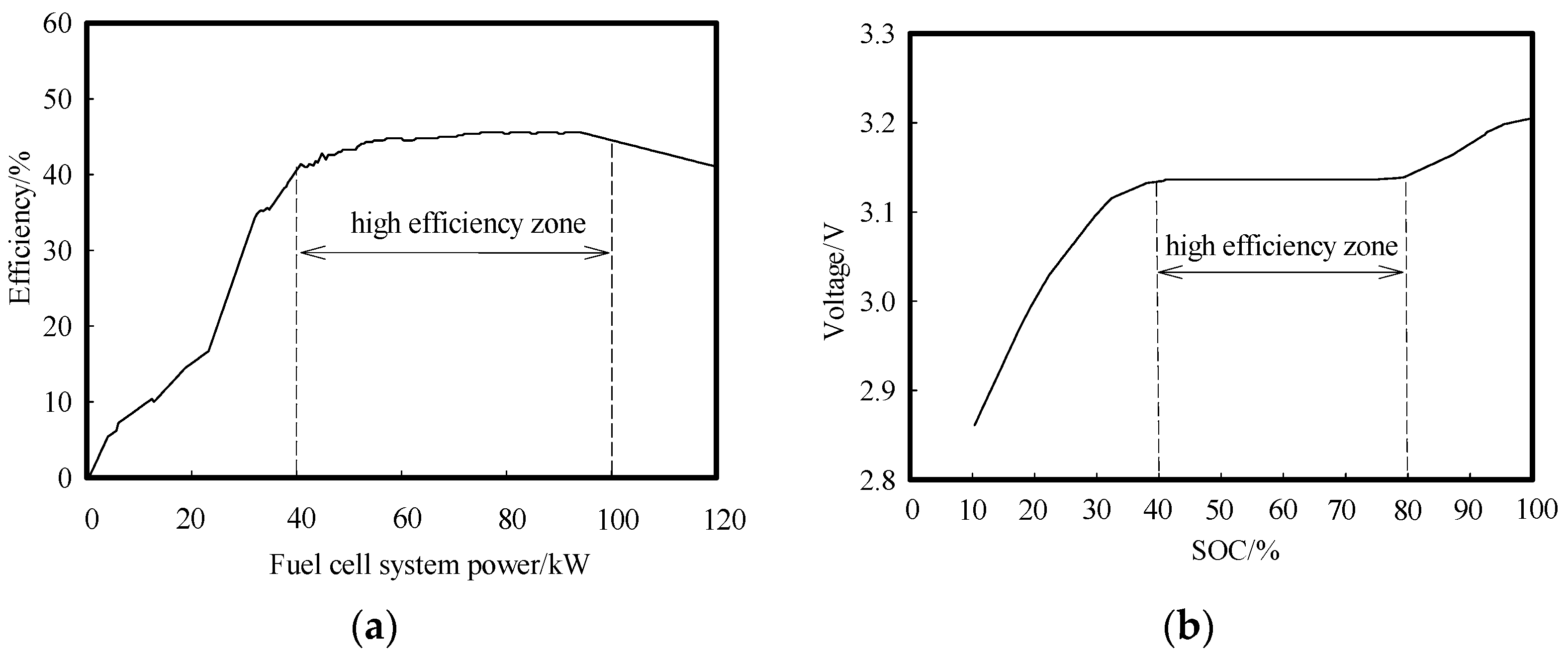
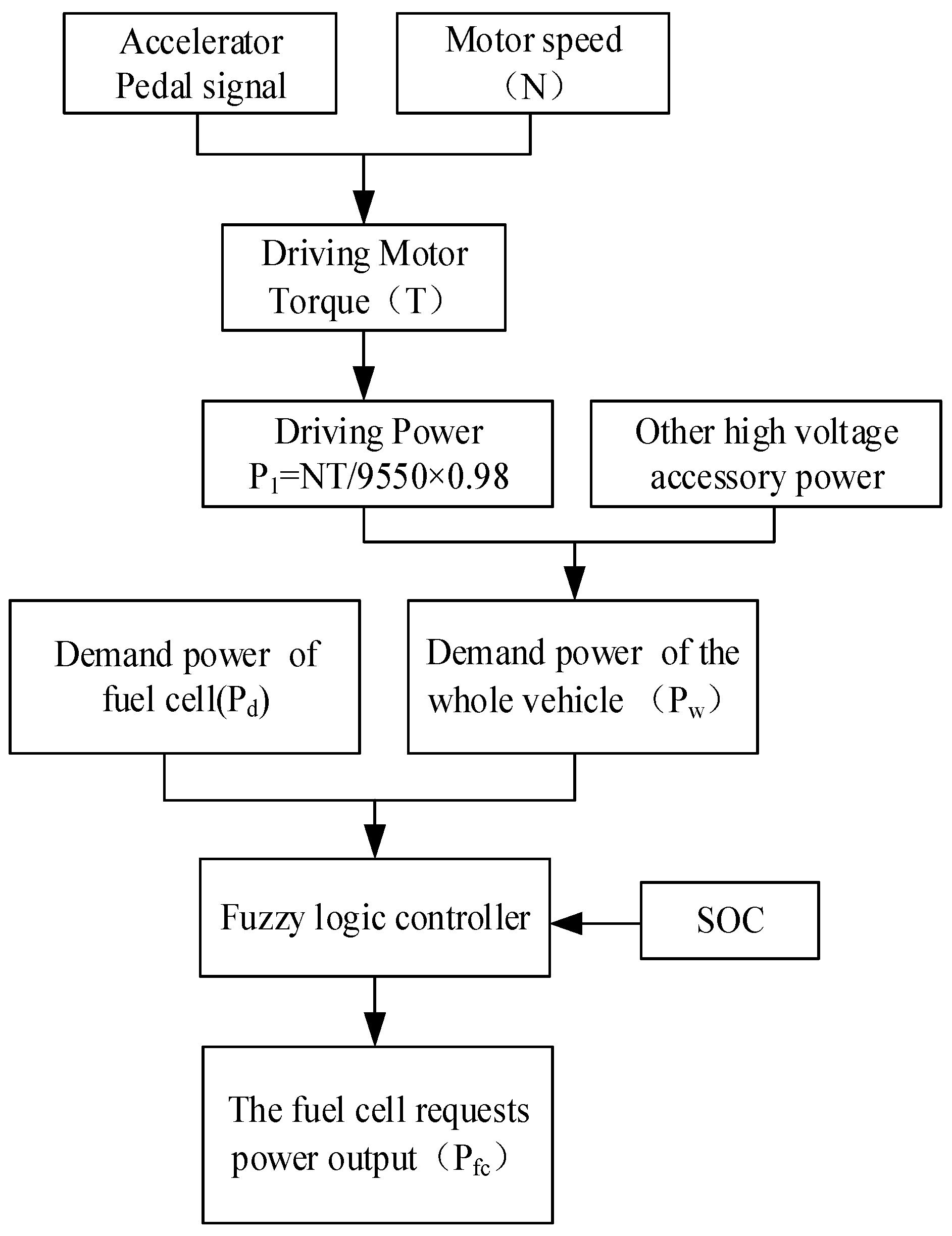
3. The Energy Management Strategy
3.1. Effective Working Range of the FC and Traction Battery
3.2. Control Method
4. Experimental Results and Discussion
4.1. Normalized World Transient Vehicle Cycle
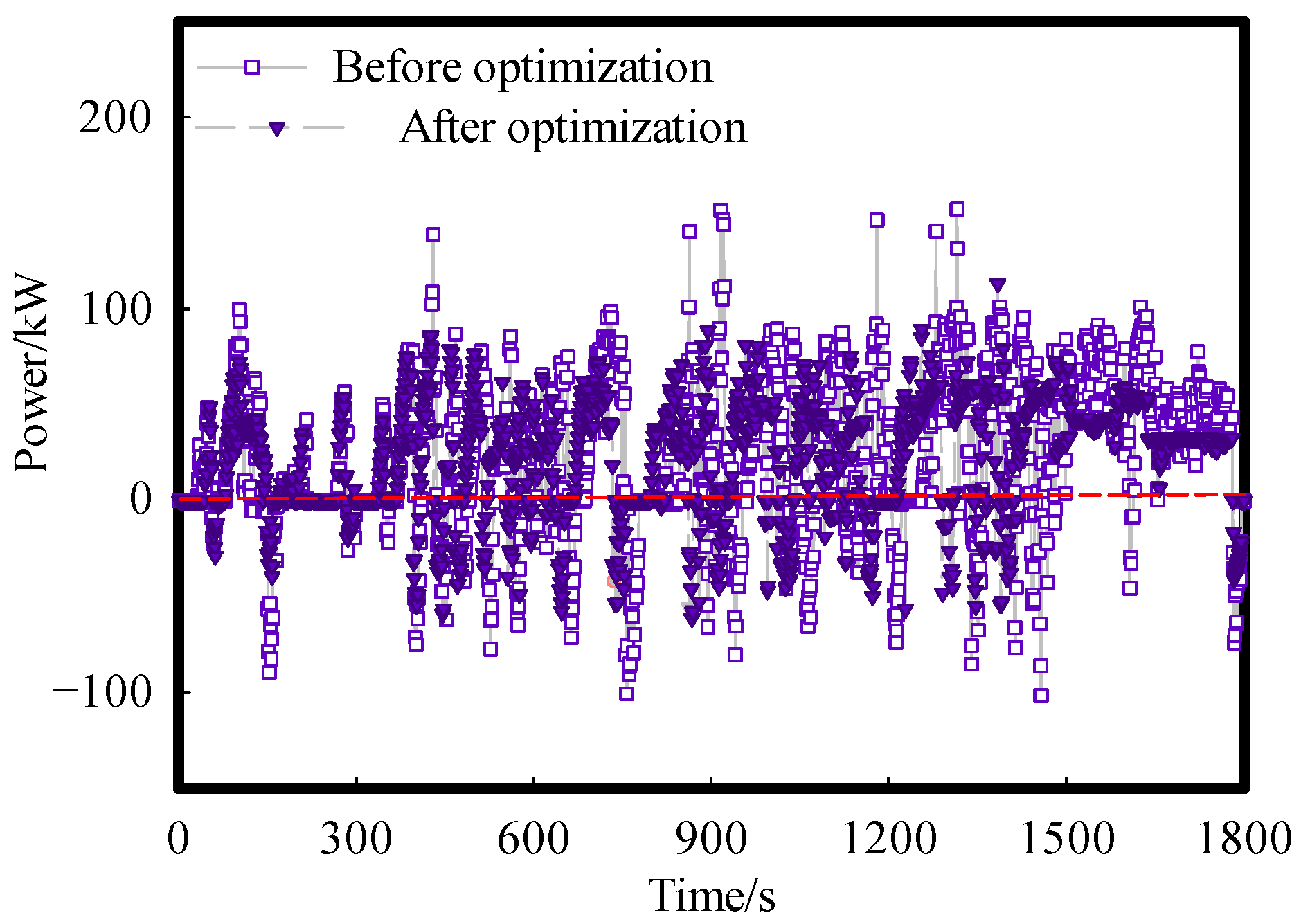
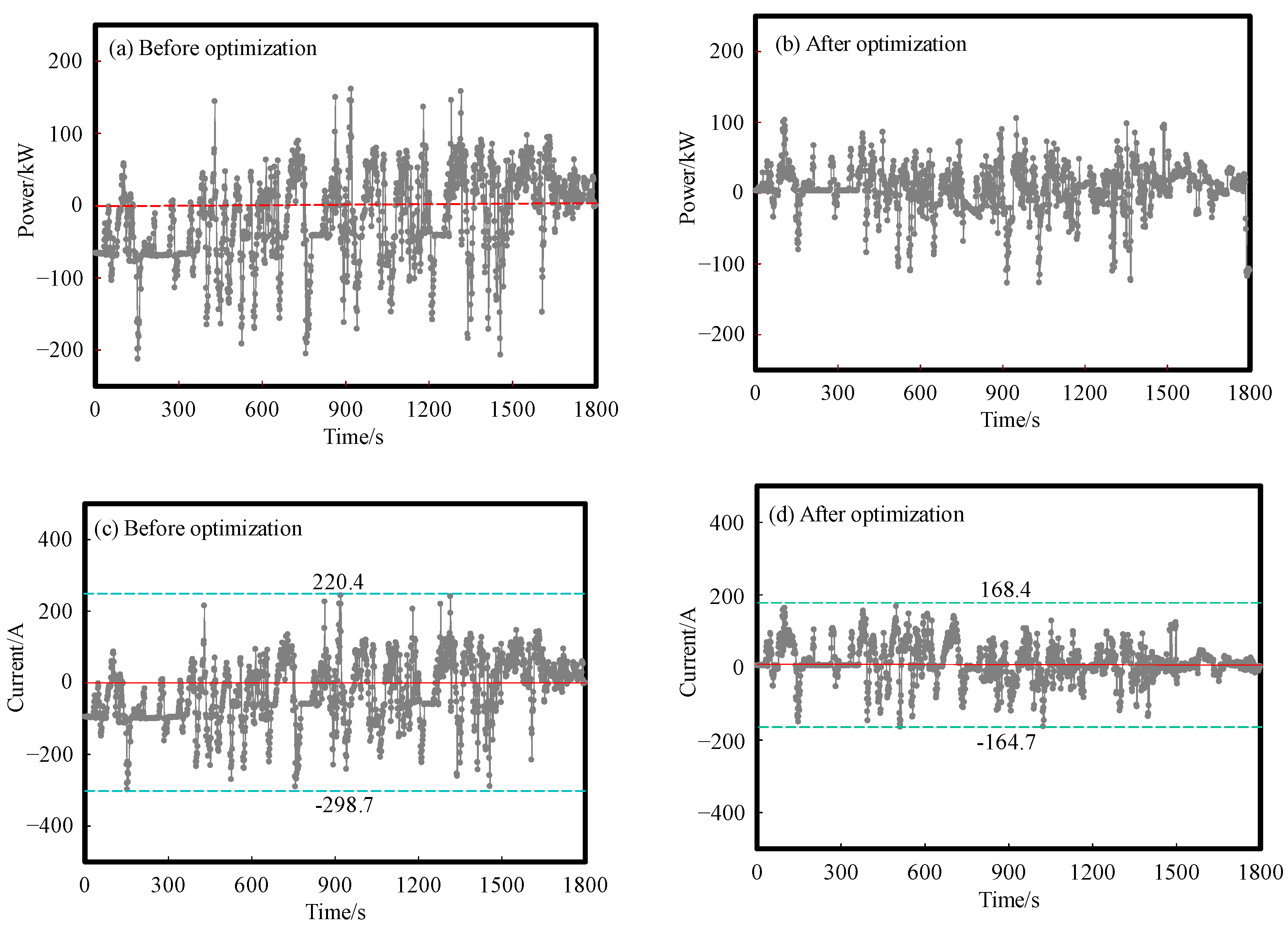
4.1.1. Vehicle Power Demand
4.1.2. Powertrain System Performance
4.2. Actual Road Conditions in the Extremely Cold Mountain Area
4.2.1. Application Scenarios
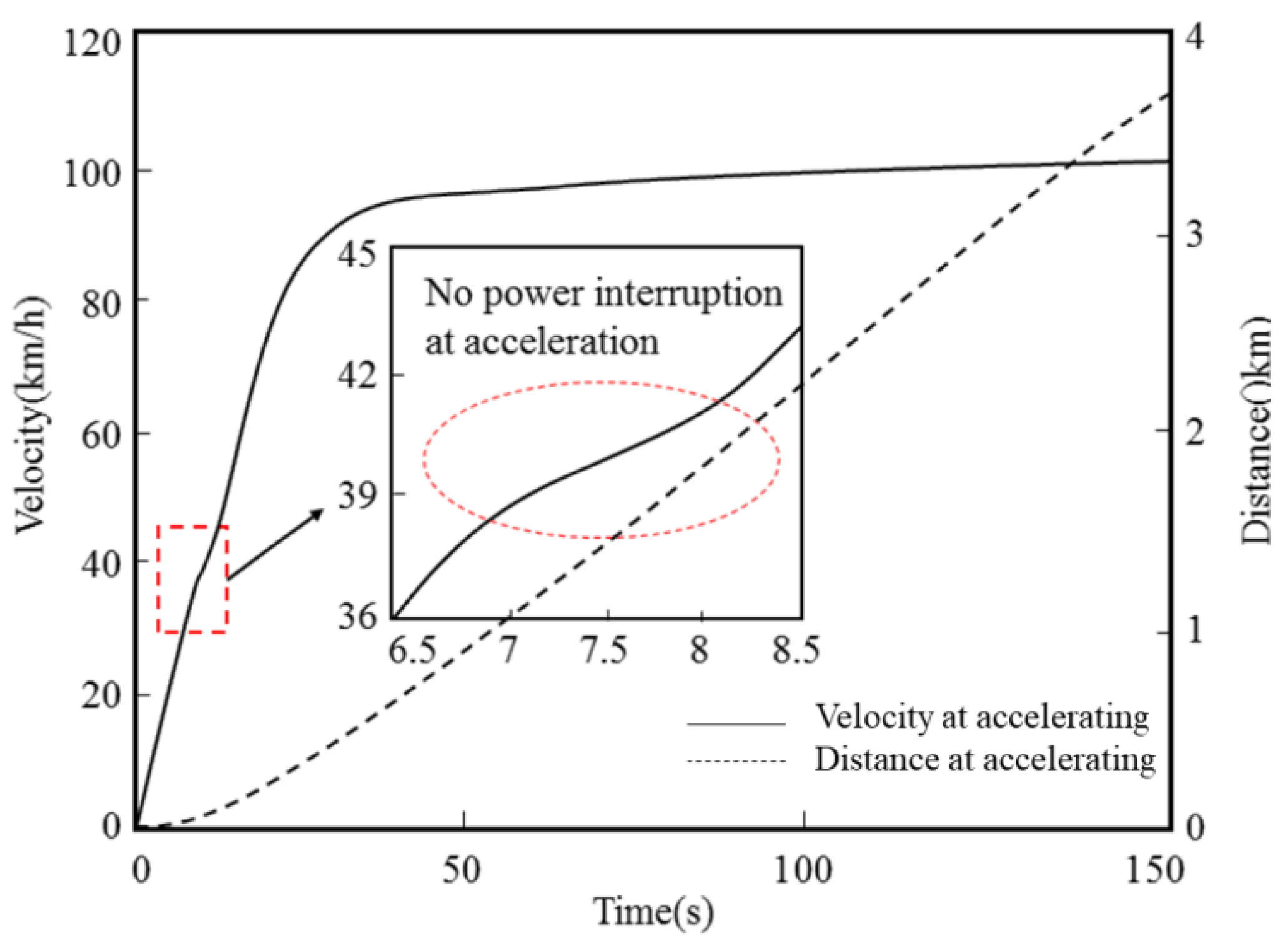
4.2.2. Climbing Performance
4.2.3. Hydrogen Consumption
5. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
Nomenclature
| v | Velocity |
| n | Speed |
| r | Wheel rolling radius |
| Pm | Peak power |
| Nm | Maximum rotational speed |
| Nr | Rated rotation speed |
| g | Gravity acceleration |
| A | Windward vehicle area, m2 |
| ηt | Total mechanical transmission efficiency |
| Paux | Power consumption of the whole vehicle auxiliary electrical equipment |
| β | Expand the constant power region coefficient |
| Pr | Power rating |
| Tm | Peak torque |
| Tr | Nominal torque |
| λ | Motor overload coefficient |
| ηDC | Working efficiency of DC/DC |
| U0 | Power battery rated voltage |
| ηmotor | Efficiency of motor and inverter |
| S | Range, 100 km |
| m | Maximum total mass of the vehicle |
| δ | Rotation mass conversion coefficient |
| ηbat | Efficiency of traction battery discharge |
References
- Fathy, A.; Yousri, D.; Alanazi, T.; Rezk, H. Minimum hydrogen consumption based control strategy of fuel cell/PV/battery/supercapacitor hybrid system using recent approach based parasitism-predation algorithm. Energy 2021, 225, 120316. [Google Scholar] [CrossRef]
- Yao, J.; You, F. Simulation-based optimization framework for economic operations of autonomous electric taxicab considering battery aging. Appl. Energy 2020, 279, 115721. [Google Scholar] [CrossRef]
- Lee, D.Y.; Elgowainy, A.; Kotz, A.; Vijayagopal, R.; Marcinkoski, J. Life-cycle implications of hydrogen fuel cell electric vehicle technology for medium and heavy-duty trucks. J. Power Sources 2018, 393, 217–229. [Google Scholar] [CrossRef]
- Liu, F.; Mauzerall, D.L.; Zhao, F.; Hao, H. Deployment of fuel cell vehicles in China: Greenhouse gas emission reductions from converting the heavy-duty truck fleet from diesel and natural gas to hydrogen. Int. J. Hydrogen Energy 2021, 46, 17982–17997. [Google Scholar] [CrossRef]
- Tang, A.; Yang, Y.; Yu, Q. A review of life prediction methods for PEMFCs in electric vehicles. Sustainability 2022, 14, 9842. [Google Scholar] [CrossRef]
- Li, Y.; Taghizadeh, H.F. The economic feasibility of green hydrogen and fuel cell electric vehicles for road transport in China. Energy Policy 2022, 160, 112703. [Google Scholar] [CrossRef]
- Jafari, K.H.; Brenna, M.; Li, H. Fuel cell hybrid locomotive with modified fuzzy logic based energy management system. Sustainability 2022, 14, 8336. [Google Scholar] [CrossRef]
- Baroutaji, A.; Arjunan, A.; Robinson, J. PEMFC poly-generation systems: Developments, merits, and challenges. Sustainability 2021, 13, 11696. [Google Scholar] [CrossRef]
- He, X.; Wang, F.; Wallington, T.J. Well-to-wheels emissions, costs, and feedstock potentials for light-duty hydrogen fuel cell vehicles in China in 2017 and 2030. Renew. Sustain. Energy Rev. 2021, 137, 110477. [Google Scholar] [CrossRef]
- Asif, U.; Schmidt, K. Fuel cell electric vehicles (FCEV): Policy advances to enhance commercial success. Sustainability 2021, 13, 5149. [Google Scholar] [CrossRef]
- Kim, S.; Jeong, H.; Lee, H. Cold-start performance investigation of fuel cell electric vehicles with heat pump-assisted thermal management systems. Energy 2021, 232, 121001. [Google Scholar] [CrossRef]
- Henao, N.; Kelouwani, S.; Agbossou, K. Proton exchange membrane fuel cells cold startup global strategy for fuel cell plug-in hybrid electric vehicle. J. Power Sources 2012, 220, 31–41. [Google Scholar] [CrossRef]
- Krishnamoorthy, A.; Rodriguez, C.; Durrant, A. Sustainable approaches to microalgal pre-treatment techniques for biodiesel production: A review. Sustainability 2022, 14, 9953. [Google Scholar] [CrossRef]
- Xu, X.; Zhao, J.; Zhao, J.; Shi, K.; Dong, P.; Wang, S.; Liu, Y.; Guo, W.; Liu, X. Comparative study on fuel saving potential of series-parallel hybrid transmission and series hybrid transmission. Energy Convers. Manag. 2022, 252, 114970. [Google Scholar] [CrossRef]
- Şefkat, G.; Özel, M.A. Experimental and numerical study of energy and thermal management system for a hydrogen fuel cell-battery hybrid electric vehicle. Energy 2022, 238, 121794. [Google Scholar] [CrossRef]
- Song, Z.; Pan, Y.; Chen, H. Effects of temperature on the performance of fuel cell hybrid electric vehicles: A review. Appl. Energy 2021, 302, 117572. [Google Scholar] [CrossRef]
- Luo, M.; Zhang, J.; Zhang, C. Cold start investigation of fuel cell vehicles with coolant preheating strategy. Appl. Therm. Eng. 2022, 201, 117816. [Google Scholar] [CrossRef]
- Wegmann, R.; Döge, V.; Becker, J. Optimized operation of hybrid battery systems for electric vehicles using deterministic and stochastic dynamic programming. J. Energy Storage 2017, 14, 22–38. [Google Scholar] [CrossRef]
- Xun, Q.; Murgovski, N.; Liu, Y. Chance-constrained robust co-design optimization for fuel cell hybrid electric trucks. Appl. Energy 2022, 320, 119252. [Google Scholar] [CrossRef]
- Malavatu, J.; O’born, R.; Kepplinger, P. Hybrid energy storage systems of energy and power dense batteries: A survey on modelling techniques and control methods. Procedia CIRP 2022, 105, 794–798. [Google Scholar] [CrossRef]
- Meng, J.; Ma, N.; Meng, F. Energy management strategy of hybrid energy system for a multi-lobes hybrid air vehicle. Energy 2022, 255, 124539. [Google Scholar] [CrossRef]
- Shi, J.; Xu, B.; Shen, Y. Energy management strategy for battery/supercapacitor hybrid electric city bus based on driving pattern recognition. Energy 2022, 243, 122752. [Google Scholar] [CrossRef]
- Saiteja, P.; Ashok, B. Critical review on structural architecture, energy control strategies and development process towards optimal energy management in hybrid vehicles. Renew. Sustain. Energy Rev. 2022, 157, 112038. [Google Scholar] [CrossRef]
- Sun, H.; Fu, Z.; Tao, F. Data-driven reinforcement-learning-based hierarchical energy management strategy for fuel cell/battery/ultracapacitor hybrid electric vehicles. J. Power Sources 2020, 455, 227964. [Google Scholar] [CrossRef]
- Ettihir, K.; Boulon, L.; Agbossou, K. Optimization-based energy management strategy for a fuel cell/battery hybrid power system. Appl. Energy 2016, 163, 142–153. [Google Scholar] [CrossRef]
- Fletcher, T.; Thring, R.; Watkinson, M. An Energy Management Strategy to concurrently optimise fuel consumption & PEM fuel cell lifetime in a hybrid vehicle. Int. J. Hydrogen Energy 2016, 41, 21503–21515. [Google Scholar] [CrossRef]
- Iqbal, M.; Becherif, M.; Ramadan, H.S. Dual-layer approach for systematic sizing and online energy management of fuel cell hybrid vehicles. Appl. Energy 2021, 300, 117345. [Google Scholar] [CrossRef]
- Geng, C.; Jin, X.; Zhang, X. Simulation research on a novel control strategy for fuel cell extended-range vehicles. Int. J. Hydrogen Energy 2019, 44, 408–420. [Google Scholar] [CrossRef]
- Guo, J.; He, H.; Li, J.; Liu, Q. Real-time energy management of fuel cell hybrid electric buses: Fuel cell engines friendly intersection speed planning. Energy 2021, 226, 120440. [Google Scholar] [CrossRef]
- Hu, X.; Zou, C.; Tang, X. Cost-optimal energy management of hybrid electric vehicles using fuel cell/battery health-aware predictive control. IEEE Trans. Power Electron. 2020, 35, 382–392. [Google Scholar] [CrossRef] [Green Version]
- Ravey, A.; Blunier, B.; Miraoui, A. Control strategies for fuel-cell-based hybrid electric vehicles: From offline to online and experimental results. IEEE Trans. Veh. Technol. 2012, 61, 2452–2457. [Google Scholar] [CrossRef]
- Lin, C.; Yi, J.; Yu, X. Gearshift control in engagement process of dual-motor coaxial propulsion system for electric bus. IEEE Access 2022, 10, 43351–43366. [Google Scholar] [CrossRef]
- Xu, X.; Liang, J.; Hao, Q. A novel electric dual motor transmission for heavy commercial vehicles. Automot. Innov. 2021, 4, 34–43. [Google Scholar] [CrossRef]


















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameter | Symbol | Value |
|---|---|---|
| Maximum gross mass | m | 16,400 kg |
| Tire size | 11R22.5 | |
| Drag coefficient | Cd | 0.52 |
| Rolling friction coefficient | f | 0.008 |
| Maximum speed | vmax | 120 km/h |
| Acceleration time from 0 to 50 km/h | t | 15 s |
| Maximum grade ability | α | 20% |
| Starting temperature | T | −25–40 °C |
| Driving Range | 500 km | |
| Hydrogen consumption per hundred kilometers | 7 kg |
| Parameters | Value |
|---|---|
| Peak torque of traction motor | 1084.82 Nm |
| Peak torque of auxiliary motor | 856.09 Nm |
| Peak power of traction motor | 147.93 KW |
| Peak power of auxiliary motor | 116.74 KW |
| Efficiency | 84% |
| Fuzzy Control Rules for Low Motor Speed | ||||||
|---|---|---|---|---|---|---|
| Pfc | SOC State | |||||
| Lower | Low | Optimal | High | Higher | ||
| ΔP | MN | optimal | optimal | smaller | smaller | smaller |
| N | big | optimal | small | small | small | |
| ZERO | bigger | big | optimal | optimal | optimal | |
| P | bigger | bigger | big | big | optimal | |
| MP | bigger | bigger | bigger | big | big | |
| Fuzzy control rules for high motor speed | ||||||
| ΔP | MN | optimal | optimal | smaller | smaller | smaller |
| N | big | optimal | small | small | small | |
| ZERO | bigger | big | optimal | optimal | optimal | |
| P | bigger | big | big | optimal | optimal | |
| MP | bigger | bigger | bigger | big | optimal | |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Liang, Z.; Liu, K.; Huang, J.; Zhou, E.; Wang, C.; Wang, H.; Huang, Q.; Wang, Z. Powertrain Design and Energy Management Strategy Optimization for a Fuel Cell Electric Intercity Coach in an Extremely Cold Mountain Area. Sustainability 2022, 14, 11253. https://doi.org/10.3390/su141811253
Liang Z, Liu K, Huang J, Zhou E, Wang C, Wang H, Huang Q, Wang Z. Powertrain Design and Energy Management Strategy Optimization for a Fuel Cell Electric Intercity Coach in an Extremely Cold Mountain Area. Sustainability. 2022; 14(18):11253. https://doi.org/10.3390/su141811253
Chicago/Turabian StyleLiang, Zhaowen, Kai Liu, Jinjin Huang, Enfei Zhou, Chao Wang, Hui Wang, Qiong Huang, and Zhenpo Wang. 2022. "Powertrain Design and Energy Management Strategy Optimization for a Fuel Cell Electric Intercity Coach in an Extremely Cold Mountain Area" Sustainability 14, no. 18: 11253. https://doi.org/10.3390/su141811253