
High-Performance Flywheel Hybrid Powertrain

Abstract
:1. Introduction
2. Brake Energy Recovery System
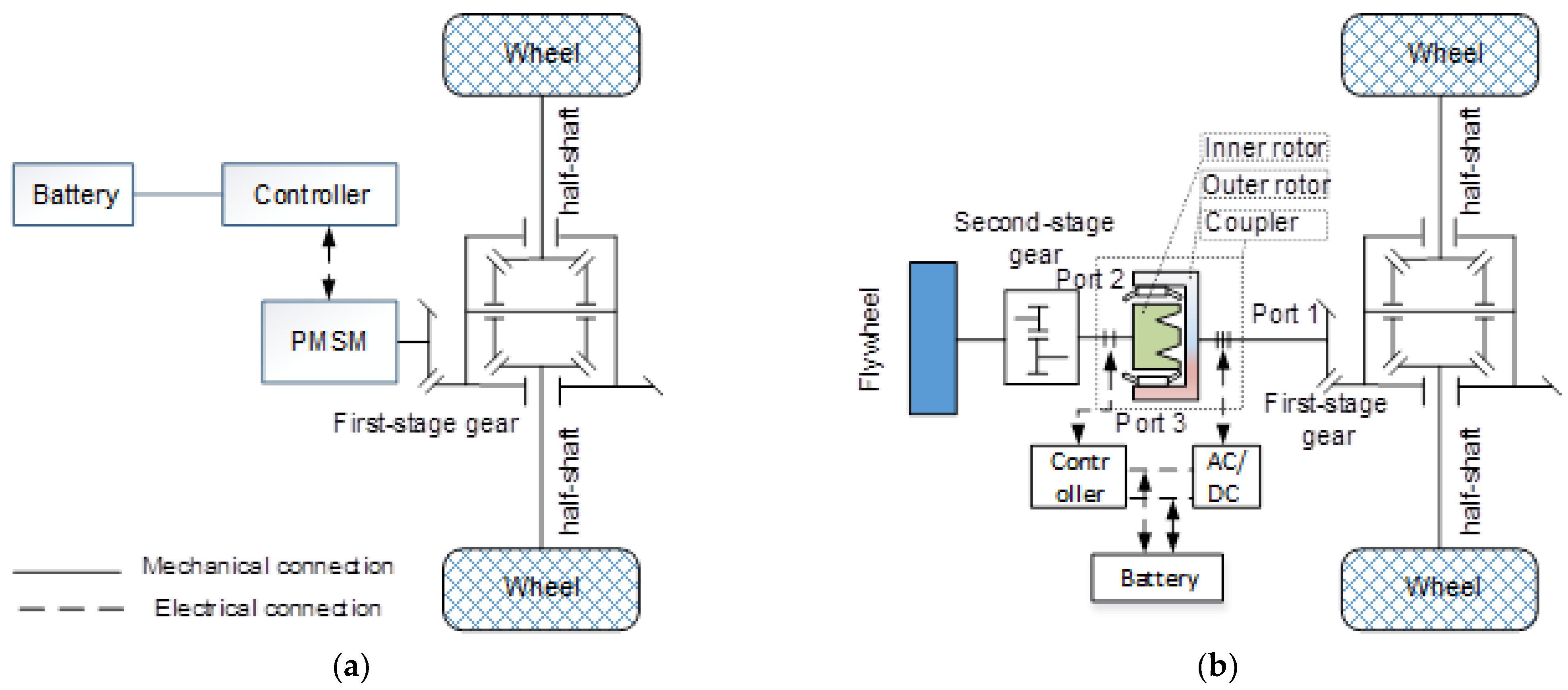
2.1. Two-Scenario Structure
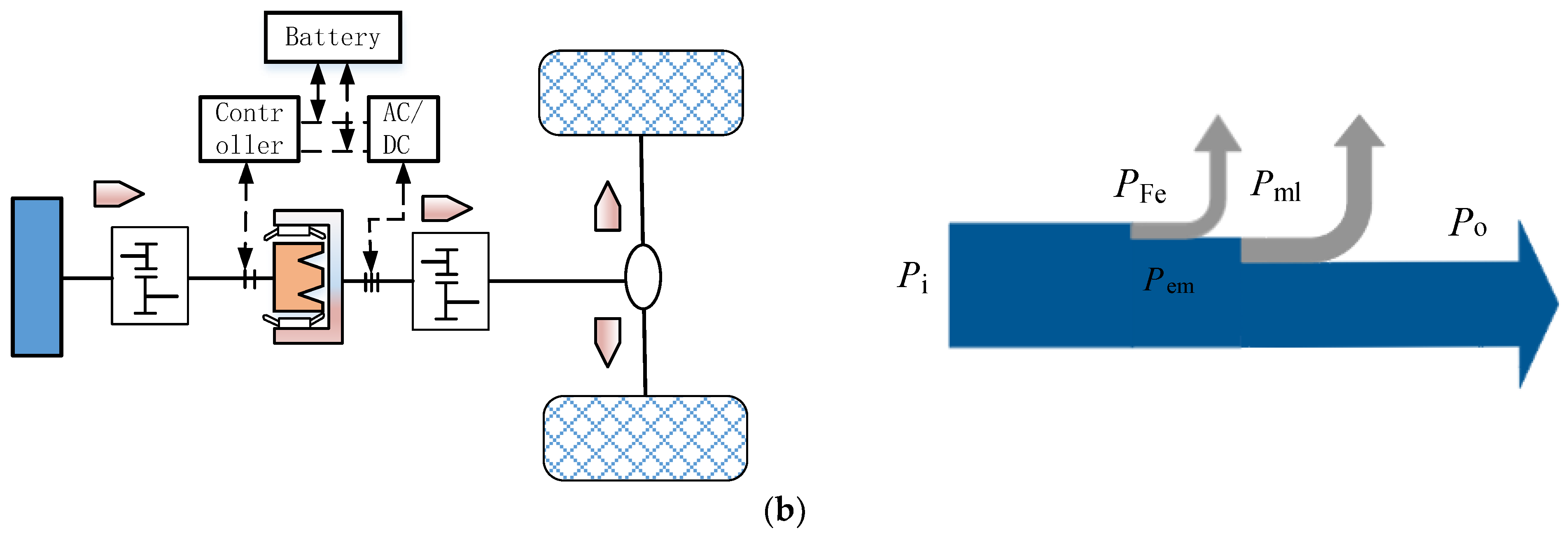
2.2. Powertrain Power Flow
3. Powertrain Modeling
3.1. Electromagnetic Coupler Overview
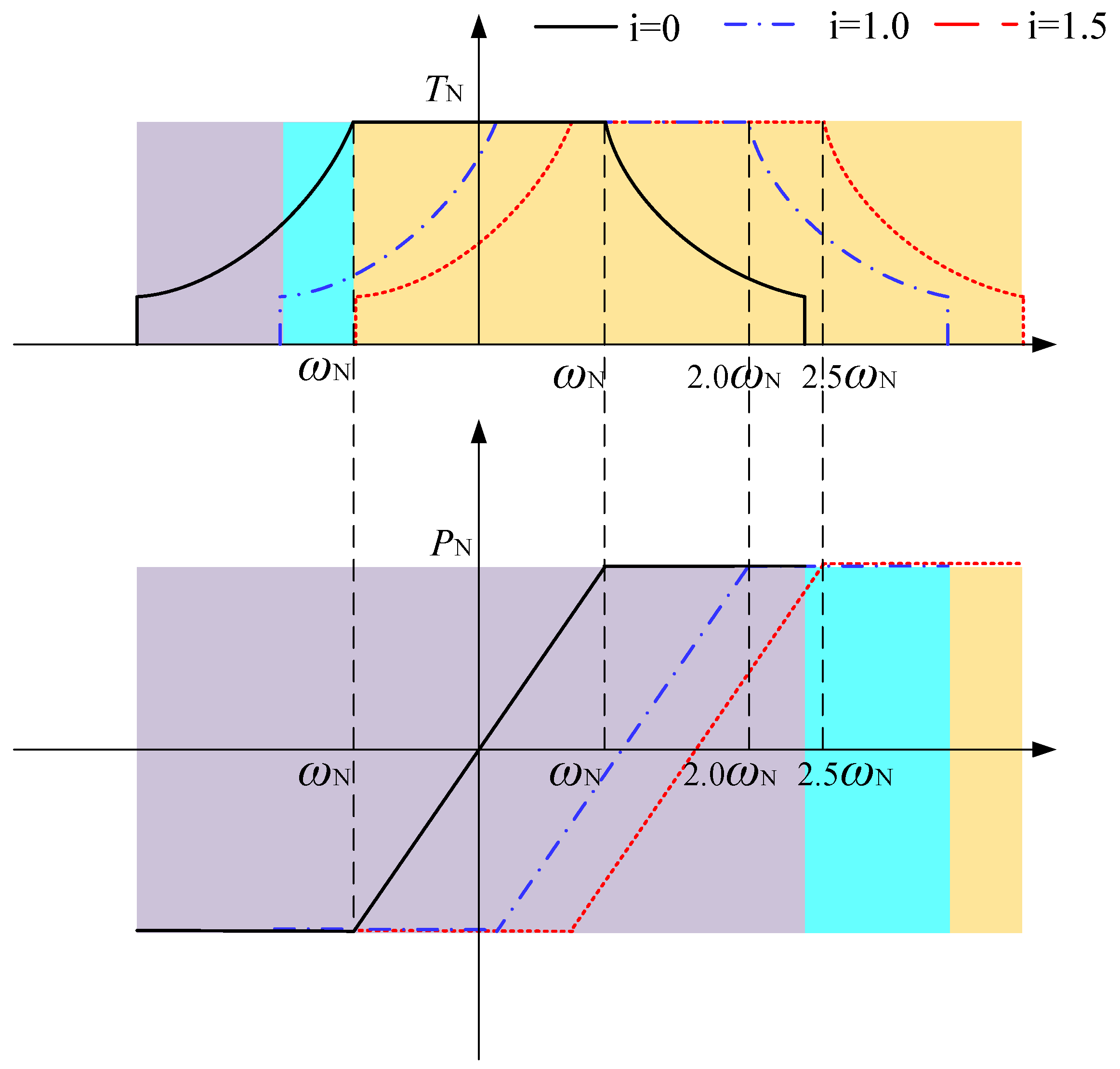
3.2. Power Characteristics
4. A Typical Case Study
4.1. PMSM Based BERS
4.2. EC-BERS
5. Test
5.1. Test Platform
5.2. Results Analysis
6. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
Abbreviations
| uoq, uod | outer rotor qd components of voltage |
| ψoq, ψod | outer rotor qd components of flux |
| Rr | outer rotor resistance |
| ioq, iod | outer rotor qd components of current |
| if | inner rotor excitation current |
| Lm | mutual inductance between inner and out rotor |
| Loq, Lod | outer rotor qd components of self-inductance |
| ωo, ωi | angular velocity outer and inner rotor |
| p | number of pole pairs |
| Te | electromagnetic torque |
| Tei, Teo | electromagnetic torque of inner and outer rotor |
| Tmi, Tmo | mechanical torque of inner and outer rotor |
| Bi, Bo | friction of inner and outer rotor |
| Ji, Jo | inertia of inner and outer rotor |
| Pi, Po | power of inner and outer rotor |
References
- Scharf, C.A. The Crazy Scale of Human Carbon Emission. Available online: https://blogs.scientificamerican.com/life-unbounded/the-crazy-scale-of-human-carbon-emission/ (accessed on 26 April 2017).
- Concordia University. CO2 Emissions Cause Lost Labor Productivity. Available online: https://www.sciencedaily.com/releases/2019/10/191011131856.htm (accessed on 11 October 2019).
- IPPC Sixth Assessment Report. Climate Change 2021: The Physical Science Basis. Available online: https://www.ipcc.ch/report/ar6/wg1/ (accessed on 9 August 2021).
- British Petroleum (BP). Statistical Review of World Energy. 2020. Available online: https://www.bp.com/en/global/corporate/energy-economics/statistical-review-of-world-energy.html (accessed on 26 October 2021).
- Zhang, Y.; Chao, Q.; Chen, Y.; Zhang, J.; Wang, M.; Zhang, Y.; Yu, X. China’s Carbon Neutrality: Leading Global Climate Governance and Green Transformation. Chin. J. Urban Environ. Stud. 2021, 9, 2150019. [Google Scholar] [CrossRef]
- Chen, H.S.; Liu, C.; Xu, Y.J.; Yue, F.; Liu, W.; Yu, Z.H. The strategic position and role of energy storage under the goal of carbon peak and carbon neutrality. Energy Storage Sci. Technol. 2021, 10, 1477–1485. [Google Scholar] [CrossRef]
- Automotive Industry In-Depth Report 2021: Analysis of Investment Opportunities in the Automotive Industry in the Context of Carbon Neutrality. Available online: https://www.docin.com/p-2657760630.html (accessed on 30 March 2021).
- China SAE. Energy Saving and New Energy Vehicle Technology Roadmap 2.0; China SAE: Beijing, China, 2020. [Google Scholar]
- Changzhou Haike New Energy. Core Technology; Changzhou Haike New Energy: Changzhou, China, 2012; Available online: http://www.chk-net.com/en/product.asp?id=12 (accessed on 25 November 2020).
- De Oliveira, J.G. Power Control Systems in a Flywheel Based All-Electric Driveline. Ph.D. Thesis, Uppsala University, Uppsala, Sweden, 2011. [Google Scholar]
- Hedlund, M.; Lundin, J.; De Santiago, J.; Abrahamsson, J.; Bernhoff, H. Flywheel Energy Storage for Automotive Applications. Energies 2015, 8, 10636–10663. [Google Scholar] [CrossRef] [Green Version]
- de Oliveira, J.G.; Schettino, H.; Gama, V.; Carvalho, R.; Bernhoff, H. Study on a doubly-fed flywheel machine-based driveline with an AC/DC/AC converter. IET Electr. Syst. Transp. 2012, 2, 51–57. [Google Scholar] [CrossRef]
- Itani, K.; De Bernardinis, A.; Khatir, Z.; Jammal, A. Comparative analysis of two hybrid energy storage systems used in a two front wheel driven electric vehicle during extreme start-up and regenerative braking operations. Energy Convers. Manag. 2017, 144, 69–87. [Google Scholar] [CrossRef]
- Dhand, A.; Pullen, K. Review of flywheel based internal combustion engine hybrid vehicles. Int. J. Automot. Technol. 2013, 14, 797–804. [Google Scholar] [CrossRef] [Green Version]
- Atienza, A.H.; Carino, A.; Jacinto, N. Mechanical Interface of Flywheel Kinetic Energy Recovery System on Motorized Tricycles. J. Phys. Conf. Ser. 2020, 1519, 012001. [Google Scholar] [CrossRef]
- Jingang, G.; Dong, H.; Sheng, W.; Chao, T. Optimum control strategy of regenerative braking energy for electric vehicle. J. Jiangsu Univ. (Nat. Sci. Ed.) 2018, 39, 132–138. [Google Scholar]
- Ehsani, M.; Gao, Y.; Longo, S.; Ebrahimi, K.M. Modern Electric, Hybrid Electric, and Fuel Cell Vehicles; CRC Press: Boca Raton, FL, USA, 2018. [Google Scholar]
- Mutoh, N.; Nakano, Y. Dynamics of Front-and-Rear-Wheel Independent-Drive-Type Electric Vehicles at the Time of Failure. IEEE Trans. Ind. Electron. 2012, 59, 1488–1499. [Google Scholar] [CrossRef]
- Wu, J.; Xu, Z.; Zhang, F.; Tong, N. Electromagnetic design of high-speed permanent magnet synchronous motor for flywheel energy storage system. J. Phys. Conf. Ser. 2021, 1887, 012044. [Google Scholar] [CrossRef]
- Dougal, R.A.; Liu, S.; White, R.E. Power and life extension of battery-ultracapacitor hybrids. IEEE Trans. Compon. Packag. Technol. 2002, 25, 120–131. [Google Scholar] [CrossRef] [Green Version]
- Rajagopal, S.; Vallikkattil, R.P.; Ibrahim, M.M.; Velev, D.G. Electrode Materials for Supercapacitors in Hybrid Electric Vehicles: Challenges and Current Progress. Condens. Matter 2022, 7, 6. [Google Scholar] [CrossRef]
- Ortuzar, M.; Moreno, J.; Dixon, J. Ultracapacitor-Based Auxiliary Energy System for an Electric Vehicle: Implementation and Evaluation. IEEE Trans. Ind. Electron. 2007, 54, 2147–2156. [Google Scholar] [CrossRef]
- Hansen, J.G.R.; O’kain, D.U. An Assessment of Flywheel High Power Energy Storage Technology for Hybrid Vehicles; Oak Ridge National Laboratory: Oak Ridge, TN, USA, 2012. Available online: https://info.ornl.gov/sites/publications/Files/Pub31707.pdf (accessed on 10 June 2021).
- Pullen, K.R.; Ellis, C.W.H. Kinetic energy storage for vehicles. In Proceedings of the IET—The Institution of Engineering and Technolgy Hybrid Vehicle Conference, Coventry, UK, 12–13 December 2006; pp. 91–108. [Google Scholar]
- Ehsani, M.; Singh, K.V.; Bansal, H.O.; Mehrjardi, R.T. State of the Art and Trends in Electric and Hybrid Electric Vehicles. Proc. IEEE 2021, 109, 967–984. [Google Scholar] [CrossRef]
- Chabchoub, M.H.; Trabelsi, H. Improving the efficiency of the energy source of electric vehicles. In Proceedings of the 2020 17th International Multi-Conference on Systems, Signals & Devices (SSD), Sfax, Tunisia, 20–23 July 2020; pp. 410–416. [Google Scholar] [CrossRef]
- Ahin, M.E.; Blaabjerg, F.; Sangwongwanich, A. A Comprehensive Review on Supercapacitor Applications and Developments. Energies 2022, 15, 674. [Google Scholar] [CrossRef]
- Rufer, A. The Dream of Efficient Energy Storage-From BESS, KERS & Co. to the Hybrid Power Plant. In Proceedings of the 19th European Conference on Power Electronics and Applications (EPE’17 ECCE Europe), Warsaw, Poland, 11–14 September 2017. [Google Scholar] [CrossRef]
- Guney, M.S.; Tepe, Y. Classification and assessment of energy storage systems. Renew. Sustain. Energy Rev. 2017, 75, 1187–1197. [Google Scholar] [CrossRef]
- Hadjipaschalis, I.; Poullikkas, A.; Efthimiou, V. Overview of current and future energy storage technologies for electric power applications. Renew. Sustain. Energy Rev. 2009, 13, 1513–1522. [Google Scholar] [CrossRef]
- Vazquez, S.; Lukic, S.M.; Galvan, E.; Franquelo, L.G.; Carrasco, J.M. Energy Storage Systems for Transport and Grid Applications. IEEE Trans. Ind. Electron. 2010, 57, 3881–3895. [Google Scholar] [CrossRef] [Green Version]
- Tang, T.H. Fundamentals of Motor and Drive; China Machine Press: Beijing, China, 2016. [Google Scholar]
- Cai, H.; Xu, L. Modeling and Control for Cage Rotor Dual Mechanical Port Electric Machine–Part I: Model Development. IEEE Trans. Energy Convers. 2015, 30, 957–965. [Google Scholar] [CrossRef]
- Ershad, N.F.; Mehrjardi, R.T.; Ehsani, M. Efficient Flywheel-Based All-Wheel-Drive Electric Powertrain. IEEE Trans. Ind. Electron. 2021, 68, 5661–5671. [Google Scholar] [CrossRef]
- Xia, L.; Jiang, H.B. Design and Steady-State Performance of a Novel Winding Type Permanent Magnet Coupling with Slip Power Recovery Function. Math. Probl. Eng. 2017, 2017, 3141089. [Google Scholar] [CrossRef]
- Nasiri, H.; Radan, A.; Ghayebloo, A.; Ahi, K. Dynamic modeling and simulation of transmotor based series-parallel HEV applied to Toyota Prius 2004. In Proceedings of the 10th International Conference on Environment and Electrical Engineering, Rome, Italy, 8–11 May 2011. [Google Scholar] [CrossRef]
- Jiang, H.B.; Tang, B.; Xu, Z.; Geng, G.-Q. Electromagnetic and Torque Characteristics of Electromagnetic Slip Coupling Applied to Hydraulic Power Steering System for Heavy-Duty Vehicles. J. Comput. Theor. Nanosci. 2015, 12, 1069–1075. [Google Scholar] [CrossRef]













{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Operative State | i | ωi | ωo | Pi | Po |
|---|---|---|---|---|---|
| The inner rotor is fixed | 0 | 0 | ωN | 0 | PN |
| The inner rotor is removed from fixation | 1.0 | ωN | 2 ωN | PN | 2.0 PN |
| 1.5 | 1.5 ωN | 2.5 ωN | 1.5 PN | 2.5 PN |
| Vehicle Parameters | Unit | Value |
|---|---|---|
| Mass | kg | 1650 |
| Wheel radius | m | 0.316 |
| Flywheel Parameters | Unit | Value |
| Inertias | kgm2 | 0.3 |
| Maximum speed | rpm | 25,000 |
| Initial speed | rpm | 4395 |
| Mass | kg | 15 |
| Gear Pair Parameters | Unit | Value |
| First stage | - | 1:4 |
| Second stage | - | 1:5 |
| PMSM Parameters | Unit | Value |
| Rated power | kW | 5.5 |
| Rated speed | rmin−1 | 1750 |
| Rated torque | Nm | 30.0 |
| Battery Parameters | Unit | Value |
| Capacity | Wh | 780 |
| SOC | % | 70 |
| Open-circuit Voltage | V | 120 |
| Electromagnetic Coupler Parameters | Unit | Value |
| Rated power | kW | 5.5 |
| Rated speed | rmin−1 | 1750 |
| Rated torque | Nm | 30.0 |
| PMSM-Based BERS | EC-BERS | Changes | |
|---|---|---|---|
| Times (s) | 5.42 | 5.42 | 0 |
| Power (kW) | 5.0 | 8.44 | +3.44 |
| Energy dealt with battery (kJ) | 28.26 | 15.53 | −12.73 |
| Energy dealt with flywheel (kJ) | - | 75.54 | - |
| Parameters | Unit | Value |
|---|---|---|
| Flywheel I inertias | kgm2 | 2.99 |
| Flywheel II inertias | kgm2 | 4.82 |
| First-stage V belt | - | 1:1.20 |
| Second-stage V belt | - | 1:1.73 |
| Torque sensor range | Nm | 0.1~100 |
| Drive motor rated power | kW | 4.0 |
| Drive motor rated speed | rmin−1 | 2890 |
| Drive motor rated torque | Nm | 13.2 |
| Electromagnetic coupler rated power/ | kW | 4.0 |
| Electromagnetic coupler rated speed/ | rmin−1 | 1528 |
| Electromagnetic coupler rated torque | Nm | 25 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Li, H.; Chu, J.; Sun, S. High-Performance Flywheel Hybrid Powertrain. Sustainability 2022, 14, 8076. https://doi.org/10.3390/su14138076
Li H, Chu J, Sun S. High-Performance Flywheel Hybrid Powertrain. Sustainability. 2022; 14(13):8076. https://doi.org/10.3390/su14138076
Chicago/Turabian StyleLi, Hong, Jiangwei Chu, and Shufa Sun. 2022. "High-Performance Flywheel Hybrid Powertrain" Sustainability 14, no. 13: 8076. https://doi.org/10.3390/su14138076