
The Lightly Robust Max-Ordering Solution Concept for Uncertain Multiobjective Optimization Problems: An Ambulance Location Problem with Unavailability


Abstract
:1. Introduction
2. Methodology
Lightly Robust Max-Ordering Solutions with Respect to the Relaxation for Uncertain Multiobjective Optimization
- (i)
- Note that when , it follows that . Then, the solution concept in Definition 2 is nothing but the concept of max-ordering optimality in Definition 1 with respect to .
- (ii)
- When , the solution concept in Definition 2 coincides with the concept of light optimality in [19].
- (iii)
- Notice that for the considered nominal scenario , the optimal value according to the Definition 2 is always greater than or equal to the optimal value of the nominal problem .
- (i)
- In step 1, by applying the algorithm for solving the max-ordering optimization problem in [23], we can obtain a max-ordering solution for the problem .
- (ii)
- Notice that in step 2, solving the problem is a constrained optimization problem. There are several methods that can be used to approximate a constrained optimization problem . For example, by applying a penalty method, we may add a penalty term to the objective function that prescribes a high cost for violation of the constraints of the original problem. Indeed, the penalty function method is to replace problem (5) with an unconstrained approximation of the formwhere c is a positive constant and is defined byIt is obvious that, if for each , a function is continuous, a function P is also continuous on X. Moreover, a function for all and for all . This means that a function P is a penalty function, and then we can apply standard search techniques for unconstrained optimization to obtain solutions for the problem . For more information, one can see [24,25]. Another technique to consider the problem is a bilevel optimization. For more details, we refer the reader to see [26,27,28].
| Algorithm 1: Finding lightly robust max-ordering solutions. |
| Input: Uncertain multiobjective optimization problem . |
| Step. 1: For the nominal scenario , find an element in a set of max-ordering solutions . |
| Step. 2: For the chosen relaxation , compute an element in the solution set subject to the set . |
| Output: Lightly robust max-ordering solutions to the problem . |
3. The Price of Robustness
| Algorithm 2: Computing the price and gain for a lightly robust max-ordering solution. |
| Input: Uncertain multiobjective optimization problem . |
| Step. 1: Compute an element in the solution set of the problem by using the Algorithm 1. |
| Step. 2: Compute the gain in robustness and the price to be paid for robustness as the formulations of Equations (8) and (9), respectively. |
| Output: The gain in robustness and the price to be paid for robustness for the choice of the relaxation . |
The Threshold Degradation
4. Case Study: The Ambulance Location Optimization Problem
4.1. Problem Description
- There is no unavailable ambulance .
- There is one unavailable ambulance .
- There are two unavailable ambulances simultaneously .
- There are three unavailable ambulances simultaneously .
- There are four unavailable ambulances simultaneously .
- .
- .
- .
- .
- .
4.2. Solution Discussions
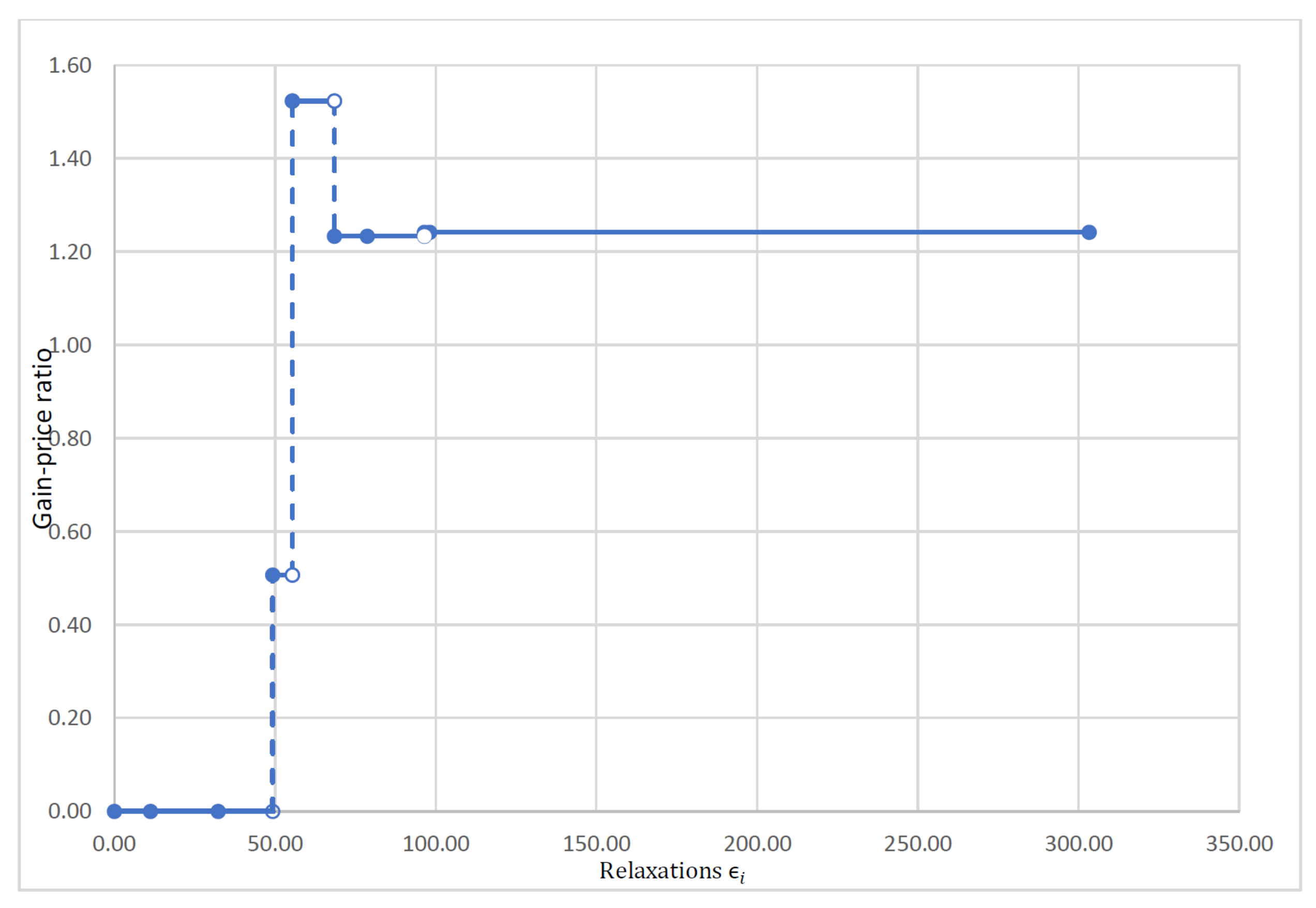
4.3. Trade-Off between the Gain of Robustness and the Price to Be Paid for Robustness
- (i)
- As indicated in Table 3, the gain in robustness and the price to be paid for robustness of two solution sets and are 0. This is because of all solutions in these two sets being identical to the solution set (see Appendix A for the explicit solutions information).
- (ii)
- For the three relaxations , , and , the associated gain in robustness values is the same number, which is . However, it was asserted that the price to be paid for robustness of these three solution sets are different. For the first set , the value of the price to be paid for robustness is , while the remaining two sets, and , are . This is due to the fact that the new members in the sets and provided the value of the corresponding longest distance in the nominal problem more than the existing elements in the set .
- (i)
- An important point to note is that if we choose the optimal location pattern relying on just data on the nominal problem and ignore the uncertainty of unavailable ambulances, it is possible that the network components of the location pattern could lose functions when a disaster or crisis occurs in practice. In fact, for example, by choice of location pattern , which is an optimal solution in the nominal problem (there is neither disaster nor crisis), the longest distance covering all demand sites with respect to this location pattern is units. However, if there is an unavailability of ambulances once a vehicle is dispatched to a call, then the longest distance covering all demand sites with respect to this location pattern in the worst-case scenario become 644.92 units. Note that the number of the longest distance covering all demand sites by the location pattern is worse than all optimal location patterns, which are computed by the concept of lightly robust max-ordering solution in the worst-case scenario (for more information see Table 2). This means that the benefits of a solution obtained by our proposed solution concept ensure a high performance in serving the longest distance covering all demand sites in uncertain environments.
- (ii)
- In the general setting on n candidate locations to locate r ambulances, we can calculate all possible scenarios of simultaneously unavailable ambulances by the formula:
5. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Conflicts of Interest
Abbreviations
| The index set for each | |
| The vector space with p dimension | |
| Set of real numbers | |
| Set of natural numbers | |
| X | Set of decision space |
| Set of uncertainty | |
| f | Objective function |
| A vector x with p coordinates, that is | |
| A subset A of vector space | |
| The index set of emergency demand sites | |
| The index set of ambulance candidate locations | |
| The index set of the considered ambulances | |
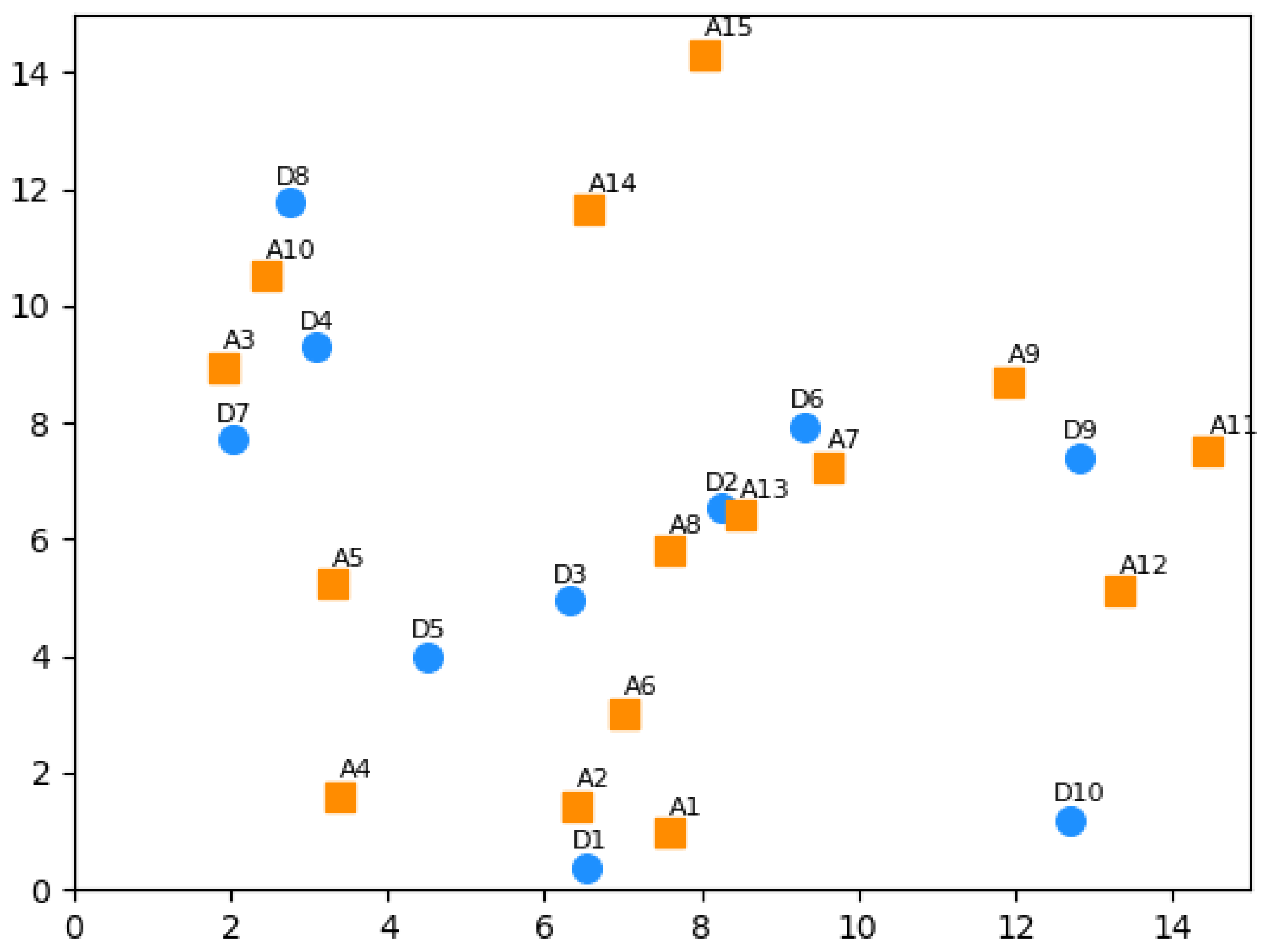
| The emergency demand site i, where (the blue squares) | |
| The weight of emergency demand site , where (the details on | |
| each simulated data of can be found in Table 1) | |
| The ambulance candidate location j, where (the blue squares) | |
| the kth location pattern for the considered 5 ambulances. |
Appendix A

{kind=link}
{kind=link}
| Thresholds | |
|---|---|
References
- Schmidt, M.; Schöbel, A.; Thom, L. Min-ordering and max-ordering scalarization methods for multiobjective robust optimization. Eur. J. Oper. Res. 2019, 275, 446–459. [Google Scholar] [CrossRef]
- Ehrgott, M. Location of Rescue Helicopters in South Tyrol. Int. J. Ind. Eng. 2001, 9, 16–22. [Google Scholar]
- Toregas, C.; Swain, R.; ReVelle, C.; Bergman, L. The location of emergency service facilities. Oper. Res. 1971, 19, 1363–1373. [Google Scholar] [CrossRef]
- Church, R.; ReVelle, C. The maximal covering location problem Papers in Regional Science. Pap. Reg. Sci. Assoc. 1974, 32, 101–118. [Google Scholar] [CrossRef]
- Schmid, V.; Doerner, K.F. Ambulance location and relocation problems with time- dependent travel times. Eur. J. Oper. Res. 2010, 207, 1293–1303. [Google Scholar] [CrossRef] [Green Version]
- Li, X.; Zhao, Z.; Zhu, X.; Wyatt, T. Covering Models and Optimization Techniques for Emergency Response Facility Location and Planning: A Review. Math. Methods Oper. Res. 2011, 74, 281–310. [Google Scholar] [CrossRef]
- Lee, G.; Murray, A.T. Maximal Covering with Network Survivability Requirements in Wireless Mesh Networks. Comput. Environ. Urban Syst. 2010, 34, 49–57. [Google Scholar] [CrossRef]
- Snyder, S.; Haight, R.G. Application of the maximal covering location problem to habitat reserve site selection: A review. Int. Reg. Sci. Rev. 2016, 39, 28–47. [Google Scholar] [CrossRef] [Green Version]
- Li, M.; Xie, C.; Li, X.; Karoonsoontawong, A.; Ge, Y.E. Robust liner ship routing and scheduling schemes under uncertain weather and ocean conditions. Transp. Res. Part C Emerg. Technol. 2022, 137, 103593. [Google Scholar] [CrossRef]
- Gao, H.; Xin, X.; Li, C.; Liu, Y.; Chen, K. Container ocean shipping network design considering carbon tax and choice inertia of cargo owners. Ocean Coast. Manag. 2022, 216, 105986. [Google Scholar] [CrossRef]
- Ben-tal, A.; Nemirovski, A.T. Robust convex optimization. Math. Oper. Res. 1998, 23, 769–805. [Google Scholar] [CrossRef] [Green Version]
- Ben-Tal, A.; Ghaoui, L.E.; Nemirovski, A. Robust Optimization; Princeton University Press: Princeton, NJ, USA, 2009. [Google Scholar]
- Kuroiwa, D.; Lee, G.M. On robust multiobjective optimization. Vietnam J. Math. 2012, 40, 305–317. [Google Scholar]
- Ehrgott, M.; Ide, J.; Schöbel, A. Minmax robustness for multiobjective optimization problems. Eur. J. Oper. Res. 2014, 239, 13–17. [Google Scholar] [CrossRef]
- Fliege, J.; Werner, R. Robust Multiobjective Optimization and Applications in Portfolio Optimization. Eur. J. Oper. Res. 2014, 234, 422–433. [Google Scholar] [CrossRef]
- Wei, H.-Z.; Chen, C.-R.; Li, S.-J. Characterizations of multiobjective robustness on vectorization counterparts. Optimization 2020, 182, 466–493. [Google Scholar] [CrossRef]
- Boriwan, P.; Ehrgott, M.; Kuroiwa, D.; Petrot, N. The lexicographic tolerable robustness concept for uncertain multiobjective optimization problems: A study on water resources management. Sustainability 2020, 12, 7582. [Google Scholar] [CrossRef]
- Boriwan, P.; Kuroiwa, D.; Petrot, N. On the properties of lexicographic tolerable robust solution sets for uncertain multiobjective optimization problems. Carpathian J. Math. 2021, 12, 25–34. [Google Scholar]
- Fischetti, M.; Monaci, M. Light robustness. In Robust and Online Large-Scale Optimization; Springer: Berlin/Heidelberg, Germany, 2009; pp. 61–84. [Google Scholar]
- Kuhn, K.; Raith, A.; Schmidt, M.; Schöbel, A. Bi-objective robust optimisation. Eur. J. Oper. Res. 2016, 252, 418–431. [Google Scholar] [CrossRef]
- Ide, J.; Schöbel, A. Robustness for uncertain multiobjective optimization: A survey and analysis of different concepts. OR Spectr. 2016, 38, 235–271. [Google Scholar] [CrossRef]
- Schöbel, A.; Zhou-Kanges, Y. The price of multiobjective robustness: Analyzing solution sets to uncertain multiobjective problems. Eur. J. Oper. Res. 2021, 291, 782–793. [Google Scholar] [CrossRef]
- Ehrgott, M. Multiobjective Optimization; Springer: Berlin/Heidelberg, Germany, 2005. [Google Scholar]
- Fiacco, A.V.; McCormick, G.P. Nonlinear Programming: Sequential Unconstrained Minimization Techniques; John Wiley Sons: New York, NY, USA, 1968. [Google Scholar]
- Horst, R.; Tuy, H. Global Optimization: Deterministic Approaches, 3rd ed.; Springer: Berlin/Heidelberg, Germany, 1995. [Google Scholar]
- Nimana, N.; Petrot, N. Splitting proximal with penalization schemes for additive convex hierarchical minimization problems. Optim. Methods Softw. 2020, 35, 1098–1118. [Google Scholar] [CrossRef]
- Nimana, N.; Petrot, N. Generalized forward-backward splitting with penalization for monotone inclusion problems. J. Glob. Optim. 2019, 73, 825–847. [Google Scholar] [CrossRef] [Green Version]
- Petrot, N.; Nimana, N. Incremental proximal gradient scheme with penalization for constrained composite convex optimization problems. Optimization 2021, 70, 1307–1336. [Google Scholar] [CrossRef]


| Demand Sites | Weight of Demand Site |
|---|---|
| 27.21040801 | |
| Relaxation | Optimal Values |
|---|---|
| 496.49 | |
| 496.49 | |
| 496.49 | |
| 471.60 | |
| 412.07 | |
| 412.07 | |
| 412.07 | |
| 376.69 | |
| 376.69 | |
| 376.69 |
| Relaxation | Trade-Off | ||
|---|---|---|---|
| Gain | Price | Ratio | |
| 0 | 0 | 0 | |
| 0 | 0 | 0 | |
| 0 | 0 | 0 | |
| 24.90 | 49.21 | 0.5 | |
| 84.42 | 55.43 | 1.52 | |
| 84.42 | 68.44 | 1.23 | |
| 84.42 | 68.44 | 1.23 | |
| 119.80 | 96.45 | 1.24 | |
| 119.80 | 96.45 | 1.24 | |
| 119.80 | 96.45 | 1.24 | |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Boriwan, P.; Phoka, T.; Petrot, N. The Lightly Robust Max-Ordering Solution Concept for Uncertain Multiobjective Optimization Problems: An Ambulance Location Problem with Unavailability. Sustainability 2022, 14, 7511. https://doi.org/10.3390/su14127511
Boriwan P, Phoka T, Petrot N. The Lightly Robust Max-Ordering Solution Concept for Uncertain Multiobjective Optimization Problems: An Ambulance Location Problem with Unavailability. Sustainability. 2022; 14(12):7511. https://doi.org/10.3390/su14127511
Chicago/Turabian StyleBoriwan, Pornpimon, Thanathorn Phoka, and Narin Petrot. 2022. "The Lightly Robust Max-Ordering Solution Concept for Uncertain Multiobjective Optimization Problems: An Ambulance Location Problem with Unavailability" Sustainability 14, no. 12: 7511. https://doi.org/10.3390/su14127511