
Relationship between the Vibration Acceleration and Stability of a Continuous Girder Bridge during Horizontal Rotation

Abstract
:1. Introduction
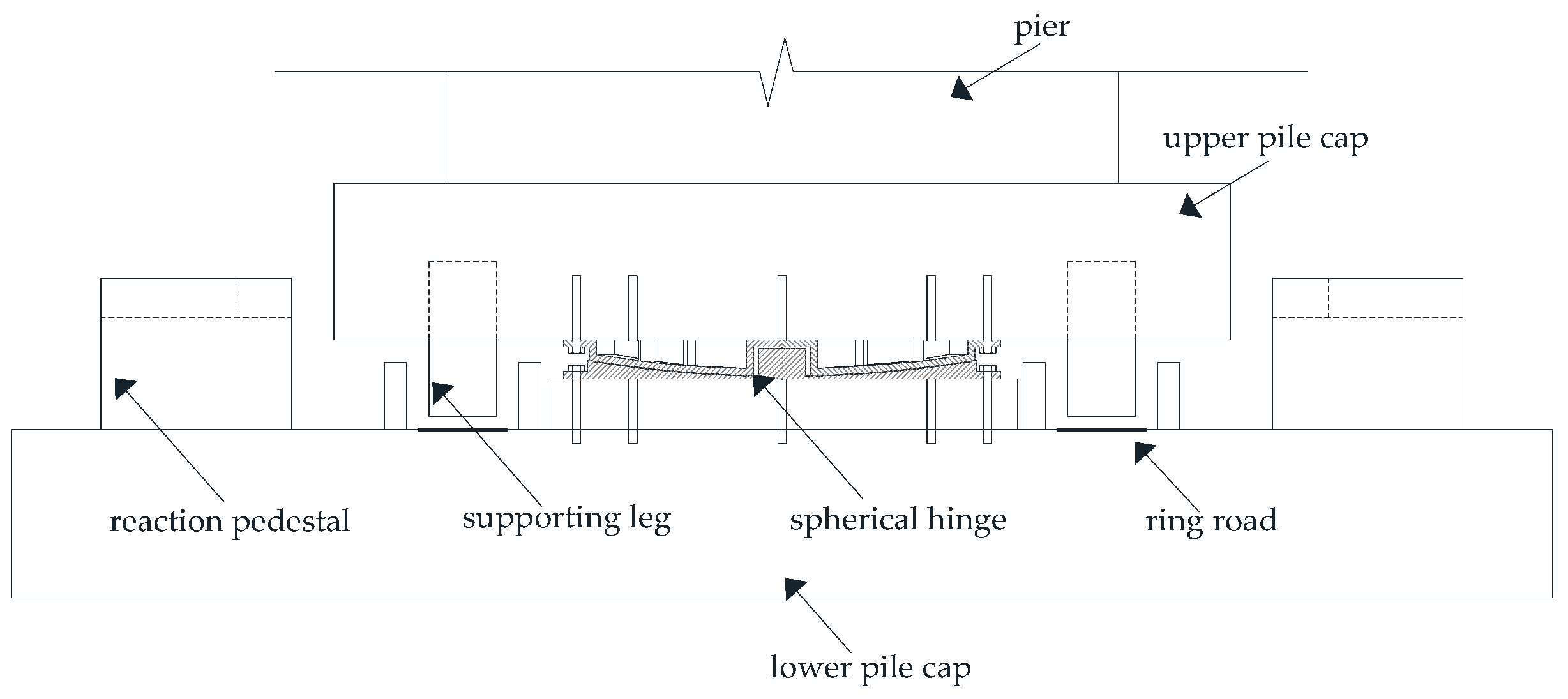
2. Main Construction Process of Horizontal Rotation Bridges
3. Vibration Characteristics Analysis of the Rotating Structure
3.1. Vibration Modal Analysis
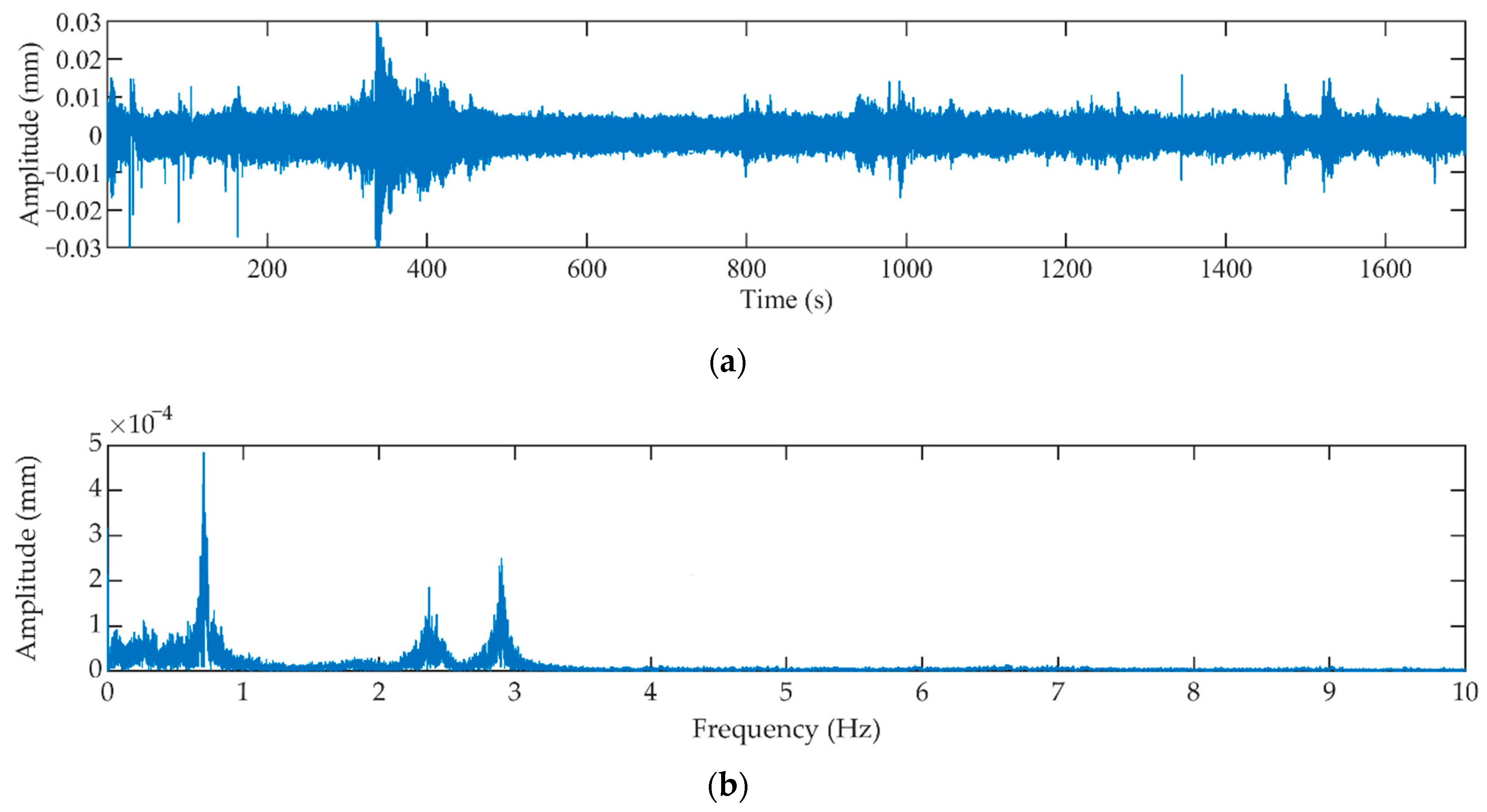
3.2. Analysis of the Vibration Tested Data Obtained from the Shang-Yuan Bridge’s Rotating Structure
4. Derivation of the Relationship between the Pier-Bottom Bending Moment M and the Acceleration a
- 1.
- The displacement of the pier bottom (rod 1) should be 0 (i.e., ); therefore:
- 2.
- The bending moment at the free end of the cantilever (rod 2) should be 0 (i.e., ); therefore:
- 3.
- The shear force at the free end of the cantilever (rod 2) should be 0 (i.e., ); therefore:
- 4.
- The vertical displacement at the supported end of the cantilever (rod 2) should be 0 (i.e., ); therefore:
- 5.
- The rotation of the pier top (rod 1) should be equal to that of the cantilever (rod 2) at the supported end (i.e., ); therefore:
- 6.
- The horizontal forces on the superstructure should balance each other.
- 7.
- According to the moment balance at the pier top (i.e., ), then:
- 8.
- According to the moment balance at the pier bottom (i.e., ), then:
5. Verification by the FEM
- 1.
- Unit length mass of the pier
- 2.
- Unit length mass of the girder
- 3.
- Additional point mass (ms)
- 4.
- Rotating stiffness of the upper turntable
- 5.
- Distance between the pier top and the gravity center of the cantilever section
- 1.
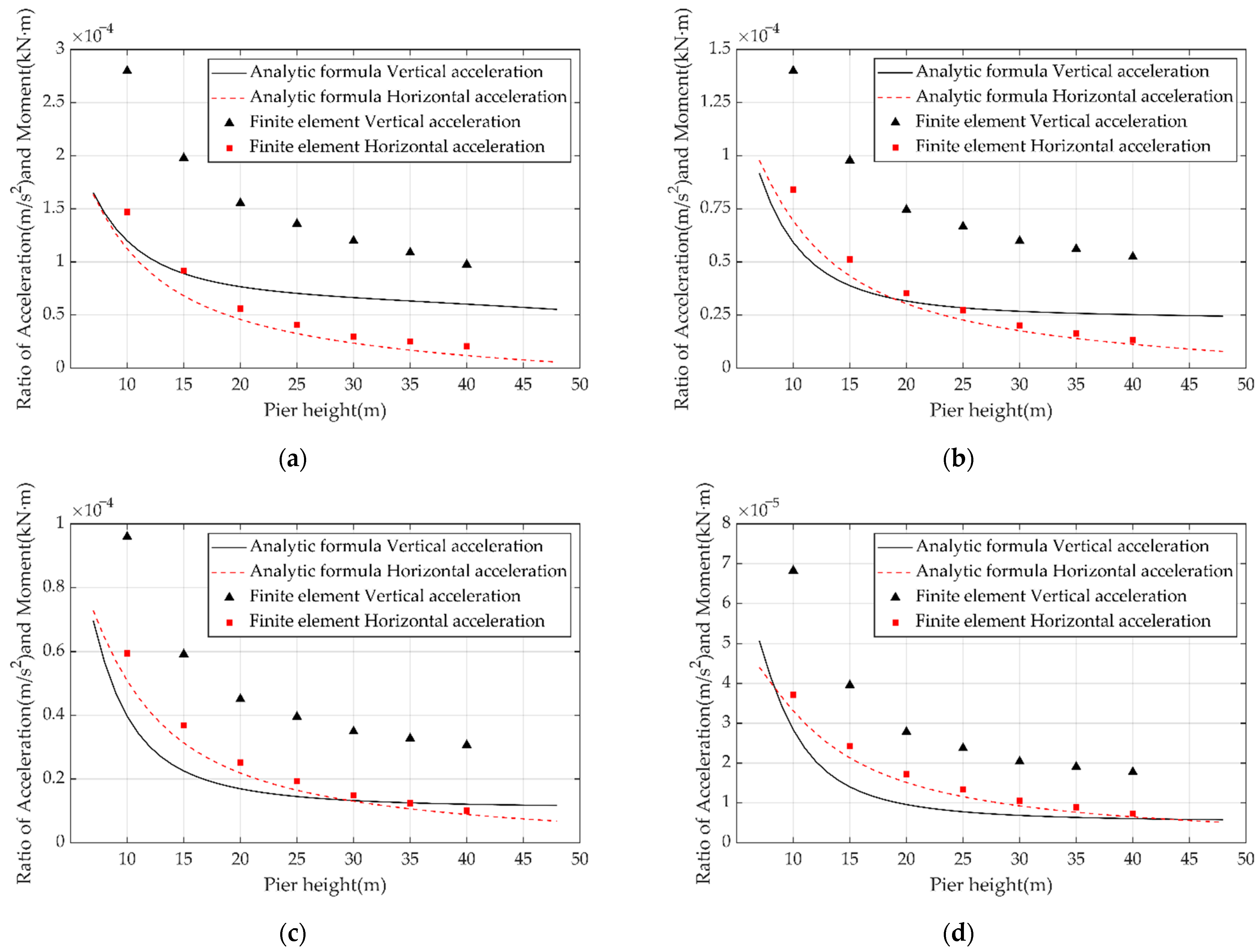
- The trends of acceleration of the pier-bottom bending moment calculated through the analytical formula were basically consistent with the results of the finite element analysis. Hence, it is acceptable to calculate the pier-bottom bending moment of the rotating structure based on the acceleration and using the analytical formula.
- 2.
- The ratio of the horizontal acceleration at the pier top () to the pier-bottom bending moment calculated through the analytical formula was more similar to the simulated FEM results than to the ratio of the vertical acceleration at the end cantilever (). It can be seen from the analysis that, in order to simplify the calculation, the variable section beam is simplified as an equal section support rod, which makes a certain difference in the stiffness of the main beam between the analytical formula and the finite element. This difference affects the vertical acceleration response of the cantilever end and reduces the calculation accuracy of the analytical formula. As for the horizontal acceleration at the top of the pier, the main factor affecting its response is the pier stiffness rather than the girder stiffness. However, both the analytical formula and the finite element simulation show that the pier is of an equal section, so the ratio of the horizontal acceleration at the top of the pier calculated by the analytical formula to the bending moment at the bottom of the pier is closer to the finite element simulation result.
- 3.
- The horizontal acceleration at the pier top () can be used to calculate the bending moment of the pier bottom and to evaluate the stability of the rotating structure, because the horizontal acceleration is not affected by the symmetric vibration mode of the girder.
6. Recommend Formula for Calculating the Allowable Acceleration
7. Conclusions
- The vibration of the rotating structure in the facade is mainly influenced by the first three order vibration modes; meanwhile, the pier-bottom section bending moment (which is directly related to the rotating structure stability) is only affected by the first two order asymmetric vibration modes.
- The analytic formula, which considers the cantilever beam and the pier as an infinite-degree-of-freedom rod, can describe the relationship between the vibration acceleration and the pier-bottom bending moment.
- The allowed maximum acceleration at the pier top (ah) should correspond to the minimum value calculated to ensure safety during the rotation process.
- The simplified form of the main beam reduces the accuracy of calculating the vertical acceleration of the cantilever end by the analytical formula, and a more optimized simplified form needs further study. Furthermore, the ratio of the pier-bottom bending moment in the first asymmetric mode to that in the second asymmetric mode is not sufficient for accurate evaluations and need further research.
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Su, M.; Wang, J.; Peng, H.; Cai, C.S.; Dai, G. State-of-the-art review of the development and application of bridge rotation construction methods in China. Sci. China Technol. Sc. 2020, 64, 1137–1152. [Google Scholar] [CrossRef]
- Feng, Y.; Qi, J.N.; Wang, J.Q.; Zhang, W.X.; Zhang, Q.F. Rotation construction of heavy swivel arch bridge for high-speed railway. Structures 2020, 26, 755–764. [Google Scholar] [CrossRef]
- Siwowski, T.; Wysocki, A. Horizontal Rotation via Floatation as an Accelerated Bridge Construction for Long-Span Footbridge Erection: Case Study. J. Bridge Eng. 2015, 20, 05014014. [Google Scholar] [CrossRef]
- Zhang, J.; El-Diraby, T.E. Constructability analysis of the bridge superstructure rotation construction method in China. J. Constr. Eng. Manag. 2006, 132, 353–362. [Google Scholar] [CrossRef]
- Che, X.J.; Zhang, X.D. Stability Impact Analysis of Random Dead Load Distribution to T-rigid Frame Bridge Swivel Construction. Appl. Mech. Mater. 2013, 361–363, 1348–1352. [Google Scholar]
- Idris, N.S.; Boon, K.H.; Kamarudin, A.F.; Sooria, S.Z. Ambient Vibration Test on Reinforced Concrete Bridges. In Proceedings of the The 3rd International Conference on Civil and Environmental Engineering for Sustainability (IConCEES 2015), Melaka, Malaysia, 1–2 December 2015; EDP Sciences: Les Ulis, France, 2016; Volume 47, p. 02012. [Google Scholar] [CrossRef]
- Chen, G.W.; Omenzetter, P.; Beskhyroun, S. Operational modal analysis of an eleven-span concrete bridge subjected to weak ambient excitations. Eng. Struct. 2017, 151, 839–860. [Google Scholar] [CrossRef]
- Nguyen, K.; Camara, A.; Rio, O.; Sparowitz, L. Dynamic Effects of Turbulent Crosswind on the Serviceability State of Vibrations of a Slender Arch Bridge Including Wind-Vehicle-Bridge Interaction. J. Bridge Eng. 2017, 22, 06017005. [Google Scholar] [CrossRef] [Green Version]
- Niu, H.W.; Zhu, J.; Chen, Z.Q.; Zhang, W. Dynamic Performance of a Slender Truss Bridge Subjected to Extreme Wind and Traffic Loads Considering 18 Flutter Derivatives. J. Aerosp. Eng. 2019, 32, 04019082. [Google Scholar] [CrossRef]
- Martinez-Rodrigo, M.D.; Andersson, A.; Pacoste, C.; Karoumi, R. Resonance and cancellation phenomena in two-span continuous beams and its application to railway bridges. Eng. Struct. 2020, 222, 105316. [Google Scholar] [CrossRef]
- Wu, S.W.; Li, H.Q.; Wang, X.; Li, R.; Tian, C.Y.; Hou, Q.S. Seismic performance of a novel partial precast RC shear wall with reserved cast-in-place base and wall edges. Soil Dyn. Earthq. Eng. 2022, 152, 107038. [Google Scholar] [CrossRef]
- Raftoyiannis, I.G. Parametric resonance of steel bridges pylons due to periodic traffic loads. Arch. Appl. Mech. 2012, 82, 1601–1611. [Google Scholar] [CrossRef]
- Wei, M.H.; Xiao, Y.Q.; Liu, H.T.; Lin, K. Nonlinear responses of a cable-beam coupled system under parametric and external excitations. Arch. Appl. Mech. 2014, 84, 173–185. [Google Scholar] [CrossRef]
- Moughty, J.J.; Casas, J.R. Performance Assessment of Vibration Parameters as Damage Indicators for Bridge Structures under Ambient Excitation. Procedia Eng. 2017, 199, 1970–1975. [Google Scholar] [CrossRef] [Green Version]
- Dos Santos, R.C.; Larocca, A.P.C.; Neto, J.O.D.; Barbosa, A.C.B.; Oliveira, J.V.M. Detection of a curved bridge deck vibration using robotic total stations for structural health monitoring. J. Civ. Struct. Health 2019, 9, 63–76. [Google Scholar] [CrossRef]
- Breuer, P.; Chmielewski, T.; Gorski, P.; Konopka, E.; Tarczynski, L. Monitoring horizontal displacements in a vertical profile of a tall industrial chimney using Global Positioning System technology for detecting dynamic characteristics. Struct. Control. Health Monit. 2015, 22, 1002–1023. [Google Scholar] [CrossRef]
- Yang, D.H.; Yi, T.H.; Li, H.N.; Zhang, Y.F. Monitoring and analysis of thermal effect on tower displacement in cable-stayed bridge. Measurement 2018, 115, 249–257. [Google Scholar] [CrossRef]
- Yang, D.H.; Yi, T.H.; Li, H.N.; Zhang, Y.F. Correlation-Based Estimation Method for Cable-Stayed Bridge Girder Deflection Variability under Thermal Action. J. Perform. Constr. Facil. 2018, 32, 04018070. [Google Scholar] [CrossRef]
- Thurgood, T.; Halling, M.W.; Barr, P.J. Structural Health Monitoring of the Cherry Hill Bridge. In Structures Congress 2006; American Society of Civil Engineers: Reston, VA, USA, 2006. [Google Scholar]
- Banerjee, S.; Chi, C.; Shinozuka, M. Kalman Filter-Based Identification of Bridge Fragility Parameters. In Structures Congress 2011; American Society of Civil Engineers: Reston, VA, USA, 2011. [Google Scholar]
- Feng, M.Q.; Kim, D.K.; Yi, J.H.; Chen, Y.B. Baseline models for bridge performance monitoring. J. Eng. Mech. 2004, 130, 562–569. [Google Scholar] [CrossRef] [Green Version]
- Wen, Y.K.; Sun, L.M. Distributed ATMD for Buffeting Control of Cable-Stayed Bridges Under Construction. Int. J. Struct. Stab. Dy. 2015, 15, 1450054. [Google Scholar] [CrossRef]
- Hua, X.G.; Wang, C.Q.; Li, S.L.; Chen, Z.Q. Experimental investigation of wind-induced vibrations of main cables for suspension bridges in construction phases. J. Fluid Struct. 2020, 93, 102846. [Google Scholar] [CrossRef]
- Giordano, P.F.; Limongelli, M.P. Response-based time-invariant methods for damage localization on a concrete bridge. Struct. Concr. 2020, 21, 1254–1271. [Google Scholar] [CrossRef]
- Yan, L.; Ren, L.; He, X.H.; Lu, S.Y.; Guo, H.; Wu, T. Strong Wind Characteristics and Buffeting Response of a Cable-Stayed Bridge under Construction. Sensors 2020, 20, 1228. [Google Scholar] [CrossRef] [Green Version]
- Clough, R.W.; Penzien, J. Dynamics of Structures, 2nd ed.; Computers and Structures: Berkeley, CA, USA, 2010. [Google Scholar]
- Railway Engineering Consulting Group Co., Ltd. Code for Design on Reinforced and Prestressed Concrete Structure of Railway Bridge and Culvert; China Railway Publishing House: Beijing, China, 2005. [Google Scholar]
- China Railway Siyuan Survey and Design Group Co., Ltd. Code for Design on Railway Bridge and Culvert; China Railway Publishing House: Beijing, China, 2017. [Google Scholar]









{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Vibration Mode | Mode Shape | Vibration Frequency (Hz) | Sum of the Modal Participating Mass Ratios (%) | Mode Directional Factor (%) | ||||
|---|---|---|---|---|---|---|---|---|
| DX | RY | DZ | DX | RY | DZ | |||
| 1 | Vibration of the main beam along the bridge | 0.7278 | 27.31 | 68.44 | 0.00 | 28.52 | 71.48 | 0.00 |
| 2 | First-order symmetric bending of the main beam | 2.4994 | 27.31 | 68.44 | 33.32 | 0.00 | 0.00 | 100.00 |
| 3 | First-order antisymmetric bending of the main beam | 2.9827 | 81.53 | 85.36 | 33.32 | 76.21 | 23.79 | 0.00 |
| 4 | Second-order antisymmetric bending of the main beam | 8.3363 | 84.00 | 86.70 | 33.32 | 64.84 | 35.08 | 0.08 |
| Span Combination (m) | 40 + 64 + 40 | 48 + 80 + 48 | 60 + 100 + 60 | 70 + 125 + 70 | |
|---|---|---|---|---|---|
| Pier | Cross-section width (cm) | 900 | 960 | 900 | 1000 |
| Cross-section height (cm) | 360 | 360 | 400 | 400 | |
| Cross-section area (m2) | 29.619 | 31.779 | 32.566 | 36.566 | |
| Section inertia moment (m4) | 29.240 | 31.573 | 39.233 | 44.566 | |
| Upper turntable | Radius of the brace slideway (m) | 4.0 | 4.5 | 4.5 | 5.0 |
| Thickness of the upper turntable (m) | 2.0 | 2.5 | 2.5 | 3.0 | |
| Thickness of the down turntable (m) | 8.0 | 9.0 | 9.0 | 10.0 | |
| Span Combination (m) | 40 + 64 + 40 | 48 + 80 + 48 | 60 + 100 + 60 | 70 + 125 + 70 |
|---|---|---|---|---|
| —Unit length mass of the pier (kg/m) | 7.5512 × 10+4 | 8.1019 × 10+4 | 8.3027 × 10+4 | 9.3224 × 10+4 |
| —Elastic modulus of the pier concrete (N/m2) | 3.30 × 10+10 | 3.30 × 10+10 | 3.30 × 10+10 | 3.30 × 10+10 |
| —Moment inertia of the pier (m4) | 29.240 | 31.573 | 39.233 | 44.566 |
| —Equivalent unit length mass of the girder (kg/m) | 3.0127 × 10+4 | 3.3027 × 10+4 | 4.0094 × 10+4 | 4.1386 × 10+4 |
| — Elastic modulus of the main girder (N/m2) | 3.55 × 10+10 | 3.55 × 10+10 | 3.55 × 10+10 | 3.60 × 10+10 |
| —Moment inertia of the girder (m4) | 28.438 | 42.669 | 79.469 | 108.016 |
| —Cantilever length of the girder (m) | 31.0 | 39.0 | 49.0 | 61.5 |
| — Additional mass (kg) | 3.7373 × 10+5 | 5.7178 × 10+5 | 8.8476 × 10+5 | 1.5798 × 10+6 |
| —Section height at the cantilever supported end (m) | 6.05 | 6.65 | 7.85 | 9.20 |
| —Section height at the midpoint of the cantilever (m) | 3.79 | 4.46 | 5.58 | 6.37 |
| —Rotating stiffness of the upper turntable (N·m) | 1.4200 × 10+11 | 2.7734 × 10+11 | 2.7734 × 10+11 | 4.7925 × 10+11 |
10−6(m/s2)/(kN·m) | Span Combination (m) | ||||||||||||
|---|---|---|---|---|---|---|---|---|---|---|---|---|---|
| 40 + 64 + 40 | 48 + 80 + 48 | ||||||||||||
| Rotating stiffness of the upper turntable (N·m) | 1.00 × 10+11 | 2.00 × 10+11 | 5.00 × 10+11 | 1.00 × 10+11 | 2.00 × 10+11 | 5.00 × 10+11 | |||||||
| Moment inertia of the pier (m4) | 25 | 90 | 25 | 90 | 25 | 90 | 25 | 90 | 25 | 90 | 25 | 90 | |
| Height of the pier (m) | 14 | 9.33 | 13.55 | 8.90 | 12.76 | 8.50 | 11.54 | 4.39 | 7.07 | 4.16 | 6.56 | 3.95 | 5.85 |
| 18 | 9.29 | 12.67 | 8.96 | 12.21 | 8.66 | 11.48 | 4.59 | 7.04 | 4.38 | 6.66 | 4.20 | 6.12 | |
| 22 | 8.97 | 11.53 | 8.74 | 11.28 | 8.53 | 10.89 | 4.66 | 6.79 | 4.48 | 6.52 | 4.34 | 6.14 | |
| 26 | 8.49 | 10.38 | 8.33 | 10.25 | 8.20 | 10.06 | 4.63 | 6.41 | 4.49 | 6.23 | 4.37 | 5.97 | |
| 30 | 7.93 | 9.30 | 7.84 | 9.25 | 7.76 | 9.17 | 4.53 | 5.98 | 4.42 | 5.86 | 4.33 | 5.68 | |
| 34 | 7.35 | 8.34 | 7.30 | 8.33 | 7.26 | 8.32 | 4.38 | 5.54 | 4.30 | 5.47 | 4.23 | 5.37 | |
10−6(m/s2)/(kN·m) | Span Combination (m) | ||||||||||||
| 60 + 100 + 60 | 70 + 125 + 70 | ||||||||||||
| Rotating stiffness of the upper turntable (N·m) | 1.00 × 10+11 | 2.00 × 10+11 | 5.00 × 10+11 | 1.00 × 10+11 | 2.00 × 10+11 | 5.00 × 10+11 | |||||||
| Moment inertia of the pier (m4) | 25 | 90 | 25 | 90 | 25 | 90 | 25 | 90 | 25 | 90 | 25 | 90 | |
| Height of the pier (m) | 14 | 1.76 | 3.11 | 1.67 | 2.90 | 1.59 | 2.61 | 0.81 | 1.49 | 0.76 | 1.39 | 0.73 | 1.26 |
| 18 | 1.90 | 3.25 | 1.80 | 3.05 | 1.73 | 2.80 | 0.88 | 1.60 | 0.83 | 1.49 | 0.80 | 1.36 | |
| 22 | 1.99 | 3.29 | 1.90 | 3.12 | 1.83 | 2.90 | 0.93 | 1.66 | 0.89 | 1.56 | 0.86 | 1.44 | |
| 26 | 2.06 | 3.26 | 1.97 | 3.12 | 1.91 | 2.94 | 0.98 | 1.70 | 0.94 | 1.61 | 0.91 | 1.50 | |
| 30 | 2.09 | 3.18 | 2.02 | 3.06 | 1.96 | 2.92 | 1.02 | 1.72 | 0.98 | 1.63 | 0.95 | 1.53 | |
| 34 | 2.10 | 3.07 | 2.04 | 2.98 | 1.99 | 2.87 | 1.05 | 1.71 | 1.01 | 1.63 | 0.98 | 1.55 | |
/10−6(m/s2)/(kN·m) | Span Combination (m) | ||||||||||||
|---|---|---|---|---|---|---|---|---|---|---|---|---|---|
| 40 + 64 + 40 | 48 + 80 + 48 | ||||||||||||
| Rotating stiffness of the upper turntable (N·m) | 1.00 × 10+11 | 2.00 × 10+11 | 5.00 × 10+11 | 1.00 × 10+11 | 2.00 × 10+11 | 5.00 × 10+11 | |||||||
| Moment inertia of the pier (m4) | 25 | 90 | 25 | 90 | 25 | 90 | 25 | 90 | 25 | 90 | 25 | 90 | |
| Height of the pier (m) | 14 | 80.80 | 112.41 | 65.96 | 74.62 | 57.55 | 52.99 | 59.77 | 82.85 | 49.03 | 55.83 | 42.88 | 40.24 |
| 18 | 56.66 | 89.35 | 47.51 | 60.29 | 42.35 | 43.57 | 42.13 | 64.05 | 35.50 | 43.94 | 31.71 | 32.38 | |
| 22 | 41.86 | 70.83 | 35.88 | 48.88 | 32.52 | 36.20 | 31.72 | 50.80 | 27.27 | 35.49 | 24.72 | 26.69 | |
| 26 | 31.80 | 55.11 | 27.81 | 39.15 | 25.59 | 29.92 | 24.90 | 40.78 | 21.74 | 29.05 | 19.95 | 22.31 | |
| 30 | 24.44 | 41.53 | 21.82 | 30.62 | 20.37 | 24.33 | 20.08 | 32.81 | 17.77 | 23.89 | 16.47 | 18.76 | |
| 34 | 18.75 | 29.81 | 17.12 | 23.10 | 16.24 | 19.28 | 16.47 | 26.25 | 14.76 | 19.59 | 13.80 | 15.78 | |
/10−6(m/s2)/(kN·m) | Span Combination (m) | ||||||||||||
| 60 + 100 + 60 | 70 + 125 + 70 | ||||||||||||
| Rotating stiffness of the upper turntable (N·m) | 1.00 × 10+11 | 2.00 × 10+11 | 5.00 × 10+11 | 1.00 × 10+11 | 2.00 × 10+11 | 5.00 × 10+11 | |||||||
| Moment inertia of the pier (m4) | 25 | 90 | 25 | 90 | 25 | 90 | 25 | 90 | 25 | 90 | 25 | 90 | |
| Height of the pier (m) | 14 | 41.56 | 63.17 | 34.10 | 42.56 | 29.79 | 30.50 | 30.65 | 47.34 | 25.18 | 31.96 | 22.01 | 22.90 |
| 18 | 29.24 | 46.37 | 24.69 | 32.07 | 22.06 | 23.76 | 21.56 | 34.16 | 18.25 | 23.79 | 16.32 | 17.73 | |
| 22 | 22.15 | 35.66 | 19.09 | 25.20 | 17.33 | 19.15 | 16.37 | 25.97 | 14.15 | 18.53 | 12.86 | 14.20 | |
| 26 | 17.61 | 28.36 | 15.42 | 20.42 | 14.15 | 15.84 | 13.04 | 20.54 | 11.46 | 14.95 | 10.54 | 11.71 | |
| 30 | 14.46 | 23.09 | 12.82 | 16.91 | 11.87 | 13.35 | 10.76 | 16.74 | 9.57 | 12.39 | 8.89 | 9.88 | |
| 34 | 12.15 | 19.08 | 10.88 | 14.21 | 10.16 | 11.41 | 9.09 | 13.95 | 8.17 | 10.48 | 7.64 | 8.49 | |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Zhang, W.; Liang, K.; Chen, Y. Relationship between the Vibration Acceleration and Stability of a Continuous Girder Bridge during Horizontal Rotation. Sustainability 2022, 14, 5853. https://doi.org/10.3390/su14105853
Zhang W, Liang K, Chen Y. Relationship between the Vibration Acceleration and Stability of a Continuous Girder Bridge during Horizontal Rotation. Sustainability. 2022; 14(10):5853. https://doi.org/10.3390/su14105853
Chicago/Turabian StyleZhang, Wenxue, Kun Liang, and Ying Chen. 2022. "Relationship between the Vibration Acceleration and Stability of a Continuous Girder Bridge during Horizontal Rotation" Sustainability 14, no. 10: 5853. https://doi.org/10.3390/su14105853