
Crash- and Simulation-Based Safety Performance Evaluation of Freeway Rest Area


Abstract
:1. Introduction
2. Literature Review
2.1. Design Criteria of Highway Resting Facilities
2.2. Studies on the Safety Performance Function (SPF) and Crash Modification Factor (CMF)
2.3. Studies on the Acceleration and Deceleration Lane Design Criteria of Highway Rest Facilities
2.4. Studies on Acceleration and Deceleration Lanes of Other Highway Facilities
3. Research Framework and Methodology
3.1. Research Framework
3.2. VISSIM Calibration and Validation
3.3. CMF Development Method
4. Data Preparation
5. Results and Discussions
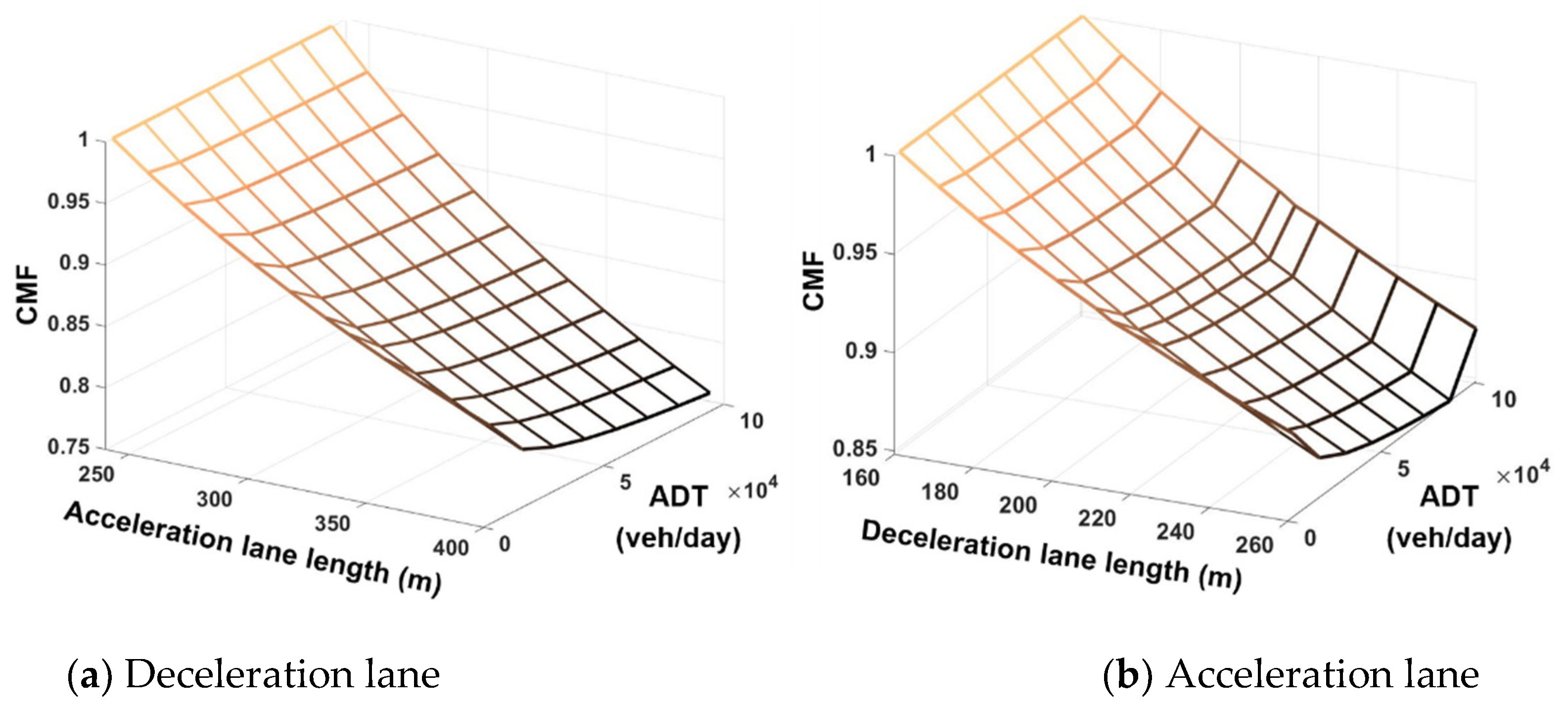
5.1. CMF Development
5.2. Exploration of Crash-Based Safety with Simulation-Based Safety
5.3. Additional simulations
6. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Korea Expressway Corporation. Available online: www.ex.co.kr (accessed on 29 June 2019).
- Ministry of Land, Infrastructure and Transport in Korea. Guideline for Establishment and Management of Rest Area in Highways; Ministry of Land, Infrastructure and Transport in Korea: Sejong, Korea, 2019. [Google Scholar]
- AASHTO. Highway Safety Manual; AASHTO: Washington, DC, USA, 2010. [Google Scholar]
- FHWA, MUTCD. Manual on Uniform Traffic Control Devices; FHWA: Washington, DC, USA, 2009. [Google Scholar]
- Romo-Martín, A.; Pérez-Acebo, H. Analysis of the Location of Service and Rest Areas and their facilities in Spanish paying motorways. Trans. Res. Procedia 2018, 33, 4–11. [Google Scholar] [CrossRef]
- Nippon.com. Available online: www.nippon.com/en/features/jg00002/service-areas.html (accessed on 29 June 2019).
- La Torre, F.; Domenichini, L.; Nocentini, A. Effects of stationary work zones on motorway crashes. Saf. Sci. 2017, 92, 148–159. [Google Scholar] [CrossRef]
- Manuel, A.; El-Basyouny, K.; Islam, M.T. Investigating the safety effects of road width on urban collector roadways. Saf. Sci. 2014, 62, 305–311. [Google Scholar] [CrossRef]
- Manan, M.M.A.; Jonsson, T.; Várhelyi, A. Development of a safety performance function for motorcycle accident fatalities on Malaysian primary roads. Saf. Sci. 2013, 60, 13–20. [Google Scholar] [CrossRef]
- El-Basyouny, K.; Sayed, T. Measuring direct and indirect treatment effects using safety performance intervention functions. Saf. Sci. 2012, 50, 1125–1132. [Google Scholar] [CrossRef]
- Intini, P.; Berloco, N.; Binetti, R.; Fonzone, A.; Ranieri, V.; Colonna, P. Transferred versus local Safety Performance Functions: A geographical analysis considering two European case studies. Saf. Sci. 2019, 120, 906–921. [Google Scholar] [CrossRef]
- Han, D.; Kim, E. Estimating Acceleration and Deceleration Lane Lengths by Analyzing Vehicle Speed Variation of Rest Areas for Drowsy Drivers. J. Korea Inst. Intell. Transp. Syst. 2018, 17, 54–66. [Google Scholar] [CrossRef]
- Seo, G.Y. A Study of Spacing and Ramp Length in the Freeway Rest Area for Sleep-Deprived Motorists. Ph.D. Thesis, Graduate School of University of Seoul, Department of Transportation Engineering in Korea, Seoul, Korea, 2018. [Google Scholar]
- Lee, C.; Won, J. A Development of the Design Guidelines for Connecting Roads in Highway Rest Area. Int. J. Highway Eng. 2013, 15, 143–154. [Google Scholar] [CrossRef]
- Lee, H.S.; Lee, E.E.; Seo, I.K.; Park, J.J. Developing design guidelines 1 for rest area based on the traffic safety. Int. J. Highway Eng. 2012, 14, 173–182. [Google Scholar] [CrossRef] [Green Version]
- Luo, J.; Zeng, X.; Chen, Y.; Sun, D.J. Determining acceleration lane length on expressway weaving area using microscopic traffic simulation. In International Symposium for Intelligent Transportation and Smart City; Springer: Singapore, 2019; pp. 13–27. [Google Scholar]
- Yang, G.; Wang, Z.; Xu, H.; Tian, Z. Feasibility of using a constant acceleration rate for freeway entrance ramp acceleration lane length design. J. Trans. Eng. Part A Syst. 2018, 144, 06017001. [Google Scholar] [CrossRef]
- Qi, Y.; Zhao, Q.; Liu, S.; Qu, W.; Li, J. Determination of Freeway Acceleration Lane Length for Smooth and Safe Truck Merging, Center for Advanced Multimodal Mobility Solutions and Education; Final Report; CAMMS: Charlotte, NC, USA, 2019. [Google Scholar]
- Chen, H.; Zhou, H.; Lin, P.S. Freeway deceleration lane lengths effects on traffic safety and operation. Safety Sci. 2014, 64, 39–49. [Google Scholar] [CrossRef]
- Hu, J.B.; Ma, W.Q.; Wang, M. Study on the Length of Speed-Change Lane in Freeway Trumpet Interchange. Adv. Mater. Res. 2013, 779, 946–953. [Google Scholar] [CrossRef]
- Zhou, J.; Fang, J.; Zhou, R.G. Study on the safety length of acceleration and deceleration lane of left-side ramp on freeway. In Proceedings of the 16th International Conference Road Safety on Four Continents, Beijing, China, 15–17 May 2013. [Google Scholar]
- Hassan, Y.; Sarhan, M.; Salehi, M. Probabilistic model for design of freeway acceleration speed-change lanes. Trans. Res. Record 2012, 2309, 3–11. [Google Scholar] [CrossRef]
- Salehi, M. Reliability-based design of freeway acceleration speed-change lanes. Ph.D. Thesis, Carleton University, Ottawa, ON, Canada, 2010. [Google Scholar]
- Park, J.; Oh, C.; Chang, M. A Study on Variable Speed Limit Strategies in Freeway Work Zone Using Multi-Criteria Decision Making Process. J. Korean Soc. Trans. 2013, 31, 3–15. [Google Scholar] [CrossRef] [Green Version]
- Rrecaj, A.A.; MBombol, K. Calibration and Validation of the VISSIM Parameters-State of the Art. TEM J. 2015, 4, 255. [Google Scholar]
- Gross, F.; Persaud, B.; Lyon, C. A Guide to Developing Quality Crash Modification Factors; No. FHWA-SA-10-032; FHWA Office of Safety: Washington, DC, USA, 2010. [Google Scholar]
- Srinivasan, R.; Baek, J.; Council, F. Safety evaluation of transverse rumble strips on approaches to stop-controlled intersections in rural areas. J. Trans. Saf. Secur. 2010, 2, 261–278. [Google Scholar] [CrossRef]
- Carter, D.; Srinivasan, R.; Gross, F.; Council, F. Recommended Protocols for Developing Crash Modification Factors; Final Report NCHRP 20-7 (314); NHCRP: Washington, DC, USA, 2012. [Google Scholar]
- Park, J.; Abdel-Aty, M. Assessing the safety effects of multiple roadside treatments using parametric and nonparametric approaches. Accid. Anal. Prev. 2015, 83, 203–213. [Google Scholar] [CrossRef] [PubMed]
- Lao, Y.; Zhang, G.; Wang, Y.; Milton, J. Generalized nonlinear models for rear-end crash risk analysis. Accid. Anal. Prev. 2014, 62, 9–16. [Google Scholar] [CrossRef]
- Lee, C.; Abdel-Aty, M.; Park, J.; Wang, J.H. Development of crash modification factors for changing lane width on roadway segments using generalized nonlinear models. Accid. Anal. Prev. 2015, 76, 83–91. [Google Scholar] [CrossRef]
- Park, J.; Abdel-Aty, M. Evaluation of safety effectiveness of multiple cross sectional features on urban arterials. Accid. Anal. Prev. 2016, 92, 245–255. [Google Scholar] [CrossRef]
- Ministry of Land, Transport and Maritime Affairs in Korea. Korea Highway Capacity Manual; Ministry of Land, Transport and Maritime: Sejong, Korea, 2013. [Google Scholar]
- Park, J.; Abdel-Aty, M. Development of adjustment functions 1 to assess combined safety effects of multiple treatments on rural two-lane roadways. Accid. Anal. Prev. 2015, 75, 310–319. [Google Scholar] [CrossRef] [PubMed]
- Park, J.; Abdel-Aty, M. Safety performance of combinations of traffic and roadway cross-sectional design elements at straight and curved segments. J. Transp. Eng. A Syst. 2017, 143, 04017015. [Google Scholar] [CrossRef]
- Wang, L.; Abdel-Aty, M.; Shi, Q.; Park, J. Real-time crash prediction for expressway weaving segments. Transp. Res. Part C Emerg. Technol. 2015, 61, 1–10. [Google Scholar] [CrossRef]
- Jeong, E.; Oh, C. Evaluating the effectiveness of active vehicle safety systems. Accid. Anal. Prev. 2017, 100, 85. [Google Scholar] [CrossRef] [PubMed]







{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Mainline Design Speed 100 km/h | ||
|---|---|---|
| Lengths of Deceleration Lane (m) | Lengths of Acceleration Lane (m) | |
| Korea | 215 | 370 |
| United States | 145 | 285 |
| Japan | 140 (Minimum Length) | 230 (Minimum Length) |
| Deceleration Lane | Acceleration Lane | |||||||
|---|---|---|---|---|---|---|---|---|
| Parameter | Mean | SD | Minimum | Maximum | Mean | SD | Minimum | Maximum |
| ADT (veh/day) | 23,328 | 20,398.94 | 3452 | 95,767 | 22,694 | 18,834.82 | 3452 | 87,406 |
| Length (m) | 177.55 | 42.55 | 50 | 350 | 225.89 | 71.16 | 90 | 480 |
| Parallel-Type Deceleration Lane | Parallel-Type Acceleration Lane | |||||||
|---|---|---|---|---|---|---|---|---|
| Number of Crashes by Rest Area Sections | Mean | SD | Minimum | Maximum | Mean | SD | Minimum | Maximum |
| Deceleration lane | 3.03 | 3.14 | 0 | 14 | 3.31 | 3.19 | 0 | 14 |
| Inside the rest area | 0.73 | 1.21 | 0 | 7 | 0.78 | 1.19 | 0 | 7 |
| Acceleration lane | 3.33 | 5.61 | 0 | 52 | 3.47 | 4.92 | 0 | 52 |
| SPF with Length of Deceleration Lane | SPF with Length of Acceleration Lane | |||
|---|---|---|---|---|
| Parameter | Coefficient | SE | Coefficient | SE |
| Intercept | −2.0972 | 0.8032 | −3.1192 | 0.8227 |
| *Ln(ADT) | 0.0425 | 0.0105 | N/A 1 | |
| *Ln(ADT) | N/A 1 | 0.0369 | 0.007 | |
| Dispersion | 0.5938 | 0.3762 | ||
| AIC | 441.4316 | 622.5627 | ||
| Mainline Traffic Volume (vph) | 2000 | |||||||||||
| Rest Area Traffic Volume Rate (%) | 2 | |||||||||||
| Heavy Vehicle Rate (%) | 25 | 40 | 55 | |||||||||
| Length of Deceleration Lane (m) | 160 | 170 | 180 | 190 | 200 | 210 | 215 | 220 | 230 | 240 | 250 | 260 |
| Length of Acceleration Lane (m) | 240 | |||||||||||
| Mainline Traffic Volume (vph) | 2000 | |||||||||||
| Rest Area Traffic Volume Rate (%) | 2 | |||||||||||
| Heavy Vehicle Rate (%) | 25 | 40 | 55 | |||||||||
| Length of Acceleration Lane (m) | 240 | 255 | 270 | 285 | 300 | 315 | 330 | 345 | 360 | 370 | 385 | 400 |
| Length of Deceleration Lane (m) | 180 | |||||||||||
| MOE | Definition |
|---|---|
| Acceleration noise | · The standard deviation of acceleration for the average acceleration |
| Jerk | · The rate of change of acceleration |
| Collisions | · The number of collisions per unit distance (km) |
| TTC | · The minimum time-to-collision value observed during the conflict |
| PET | · The minimum post encroachment time observed during the conflict |
| DeltaS | · The magnitude of the difference in vehicle velocities (or trajectories) |
| MaxDeltaV | · The maximum DeltaV value of either vehicle in the conflict |
| Mainline Traffic Volume (vph) | Rest Area Traffic Volume Rate (%) | Deceleration Lane Length (m) | |||||||||||
|---|---|---|---|---|---|---|---|---|---|---|---|---|---|
| 160 | 170 | 180 | 190 | 200 | 210 | 215 | 220 | 230 | 240 | 250 | 260 | ||
| 2000 | 2 | 2.850 | 2.770 | 2.708 | 2.641 | 2.584 | 2.556 | 2.541 | 2.499 | 2.445 | 2.407 | 2.441 | 2.441 |
| 3 | 2.838 | 2.777 | 2.725 | 2.650 | 2.589 | 2.565 | 2.552 | 2.509 | 2.461 | 2.422 | 2.456 | 2.424 | |
| 2400 | 2 | 2.842 | 2.776 | 2.745 | 2.645 | 2.590 | 2.606 | 2.601 | 2.519 | 2.528 | 2.439 | 2.475 | 2.427 |
| 3 | 2.862 | 2.788 | 2.757 | 2.640 | 2.581 | 2.589 | 2.582 | 2.489 | 2.491 | 2.390 | 2.417 | 2.382 | |
| Mainline Traffic Volume (vph) | Rest Area Traffic Volume Rate (%) | Acceleration Lane Length (m) | |||||||||||
|---|---|---|---|---|---|---|---|---|---|---|---|---|---|
| 240 | 255 | 270 | 285 | 300 | 315 | 330 | 345 | 360 | 370 | 385 | 400 | ||
| 2000 | 2 | 16.137 | 16.098 | 15.742 | 15.760 | 15.623 | 15.772 | 15.534 | 15.508 | 15.561 | 15.385 | 15.338 | 15.391 |
| 3 | 16.209 | 16.309 | 15.897 | 15.668 | 15.571 | 16.125 | 15.574 | 15.517 | 15.419 | 15.342 | 15.270 | 15.497 | |
| 2400 | 2 | 16.249 | 16.338 | 15.788 | 15.841 | 15.734 | 16.215 | 15.857 | 15.609 | 15.596 | 15.598 | 15.599 | 15.552 |
| 3 | 15.817 | 15.886 | 15.715 | 15.742 | 15.695 | 15.562 | 15.527 | 15.473 | 15.329 | 15.366 | 15.283 | 15.233 | |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Kim, H.; Kwon, K.; Park, N.; Park, J.; Abdel-Aty, M. Crash- and Simulation-Based Safety Performance Evaluation of Freeway Rest Area. Sustainability 2021, 13, 4963. https://doi.org/10.3390/su13094963
Kim H, Kwon K, Park N, Park J, Abdel-Aty M. Crash- and Simulation-Based Safety Performance Evaluation of Freeway Rest Area. Sustainability. 2021; 13(9):4963. https://doi.org/10.3390/su13094963
Chicago/Turabian StyleKim, Hyeonseo, Kyeongjoo Kwon, Nuri Park, Juneyoung Park, and Mohamed Abdel-Aty. 2021. "Crash- and Simulation-Based Safety Performance Evaluation of Freeway Rest Area" Sustainability 13, no. 9: 4963. https://doi.org/10.3390/su13094963