
Analysis on Stability of Roadside Parking System in a Rail-Integrated Transport Hub

Abstract
:1. Introduction
2. Research on the Basic Theory of Roadside Parking System
2.1. Research on the Stability Strategy of a Roadside Parking System
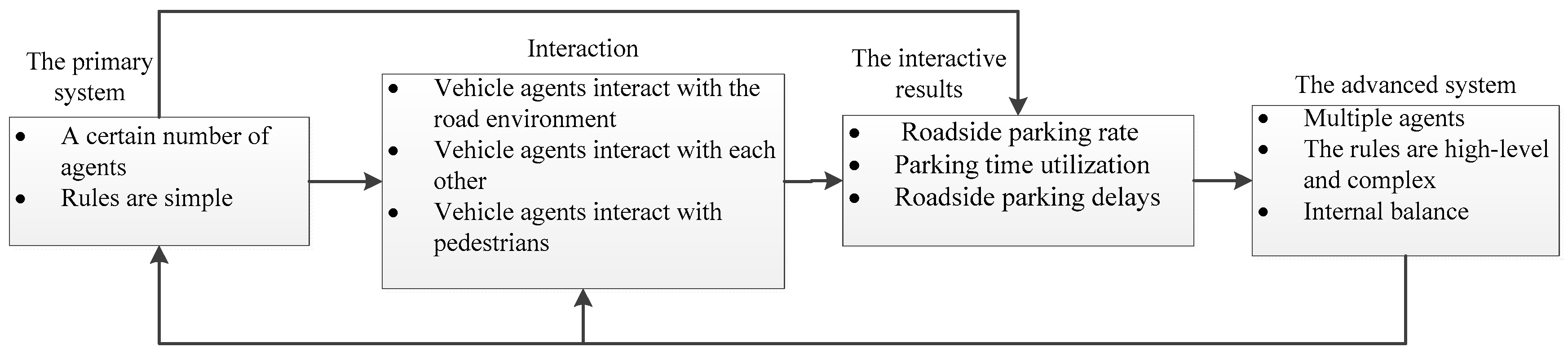
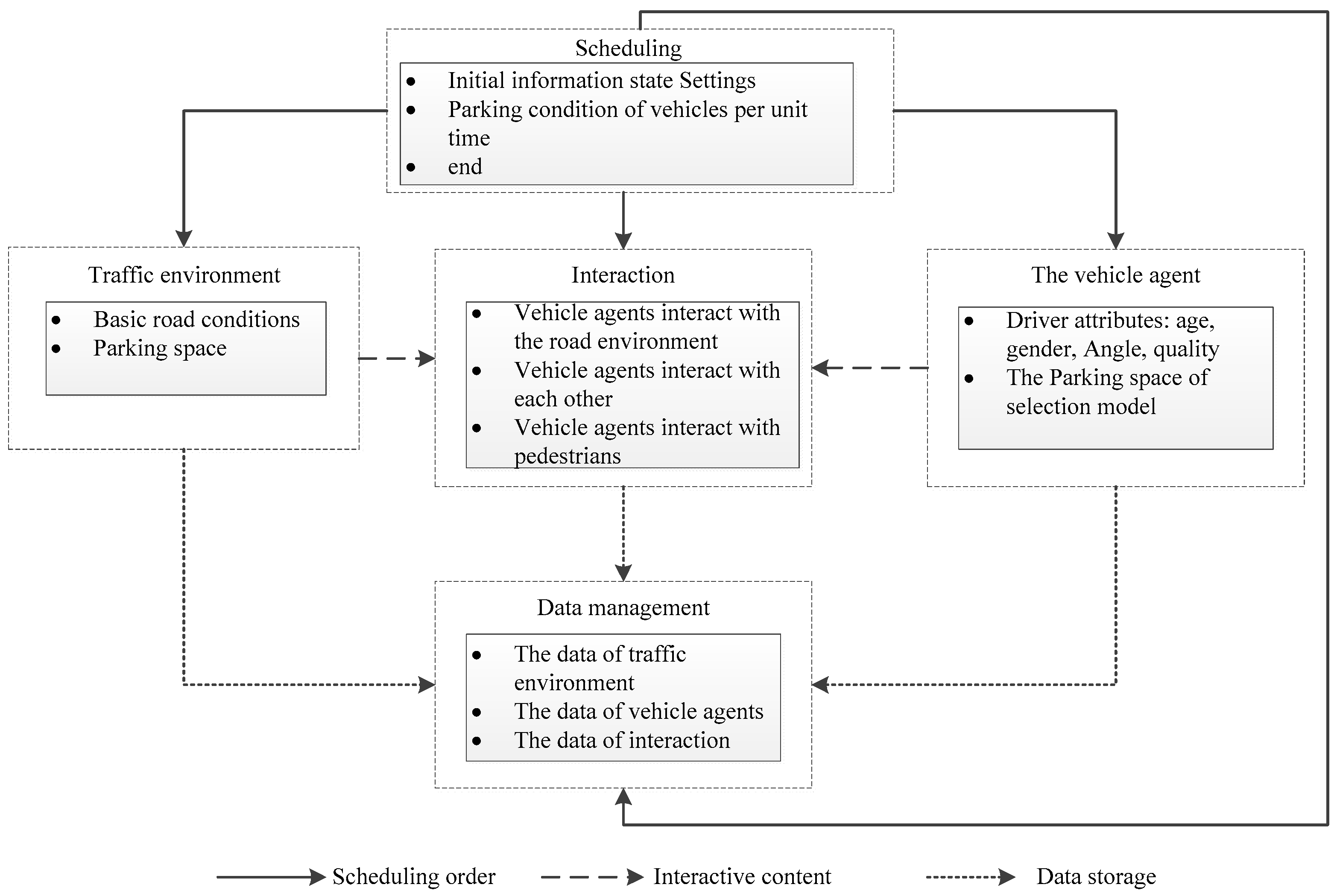
2.2. Research on the Interactive Mechanism of a Roadside Parking System
2.3. Research on the Avoidance Logic Algorithm of a Roadside Parking System
2.4. Establishment of a Stability Strategy Model of a Roadside Parking System
2.4.1. Traffic Survey Sample Size Analysis
2.4.2. Establishment of a Stability Strategy Model of a Roadside Parking System
3. Research on the Evaluation Indicators of a Roadside Parking System
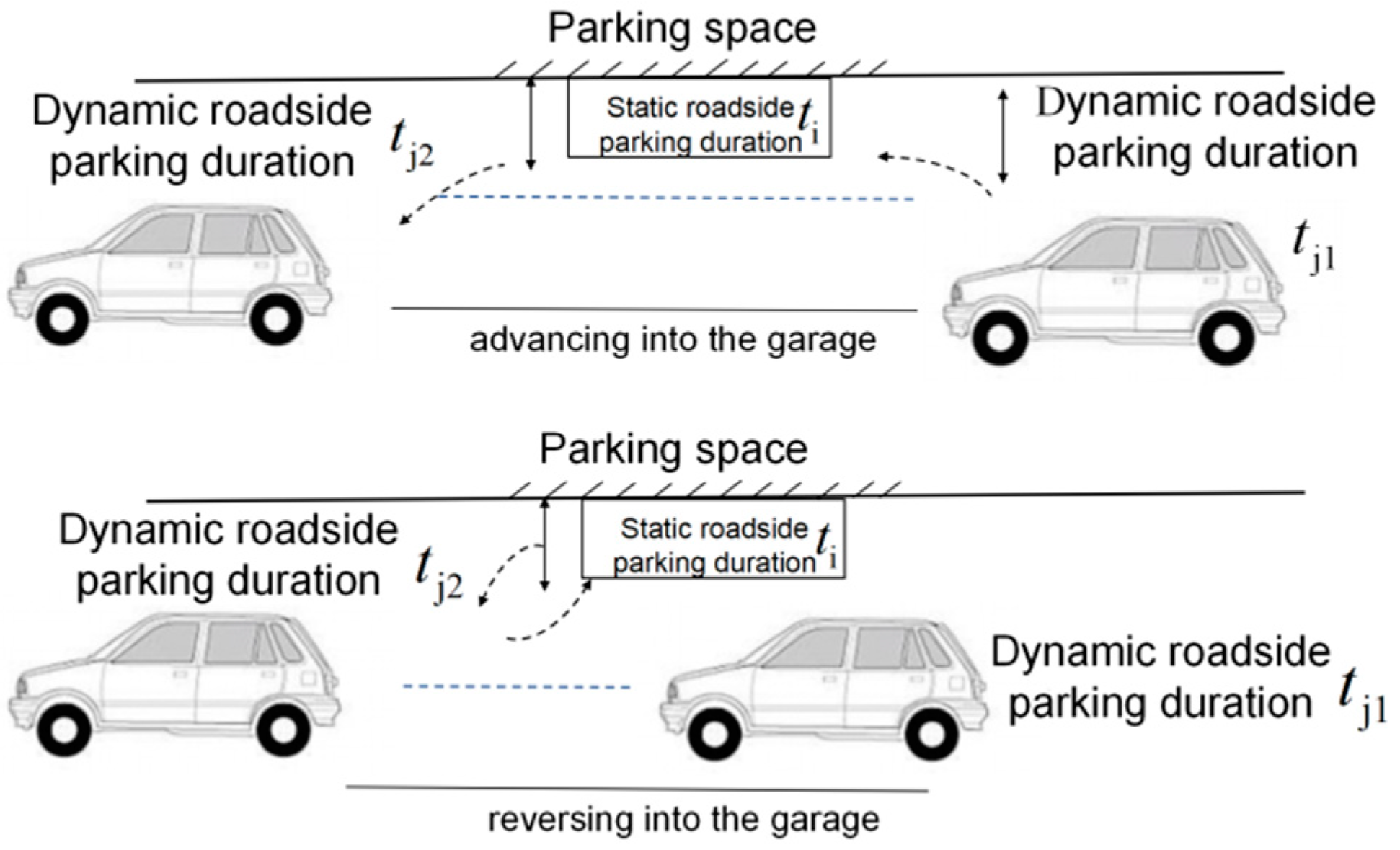
3.1. Static Roadside Parking Duration
3.2. Dynamic Roadside Parking Duration
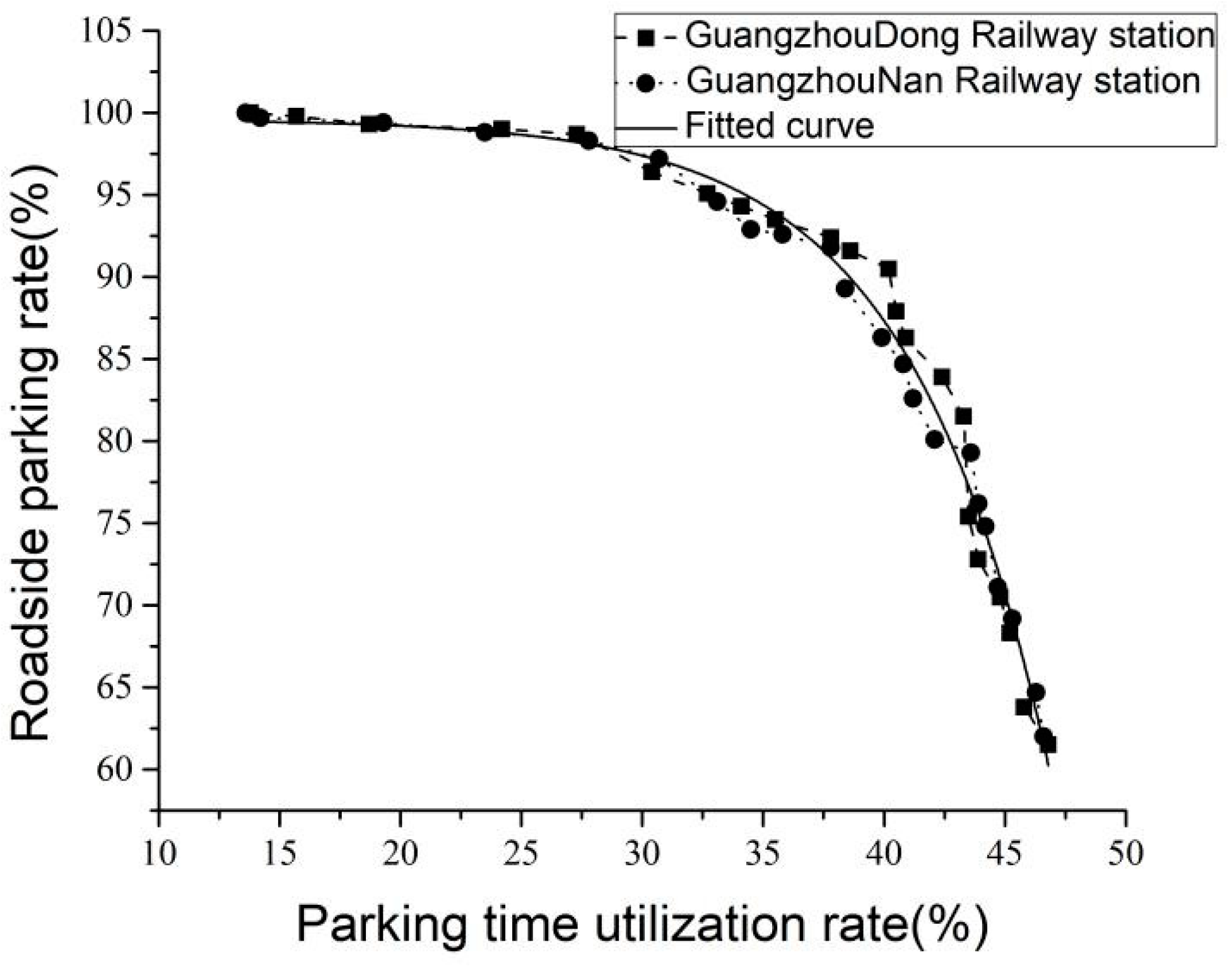
3.3. Roadside Parking Rate
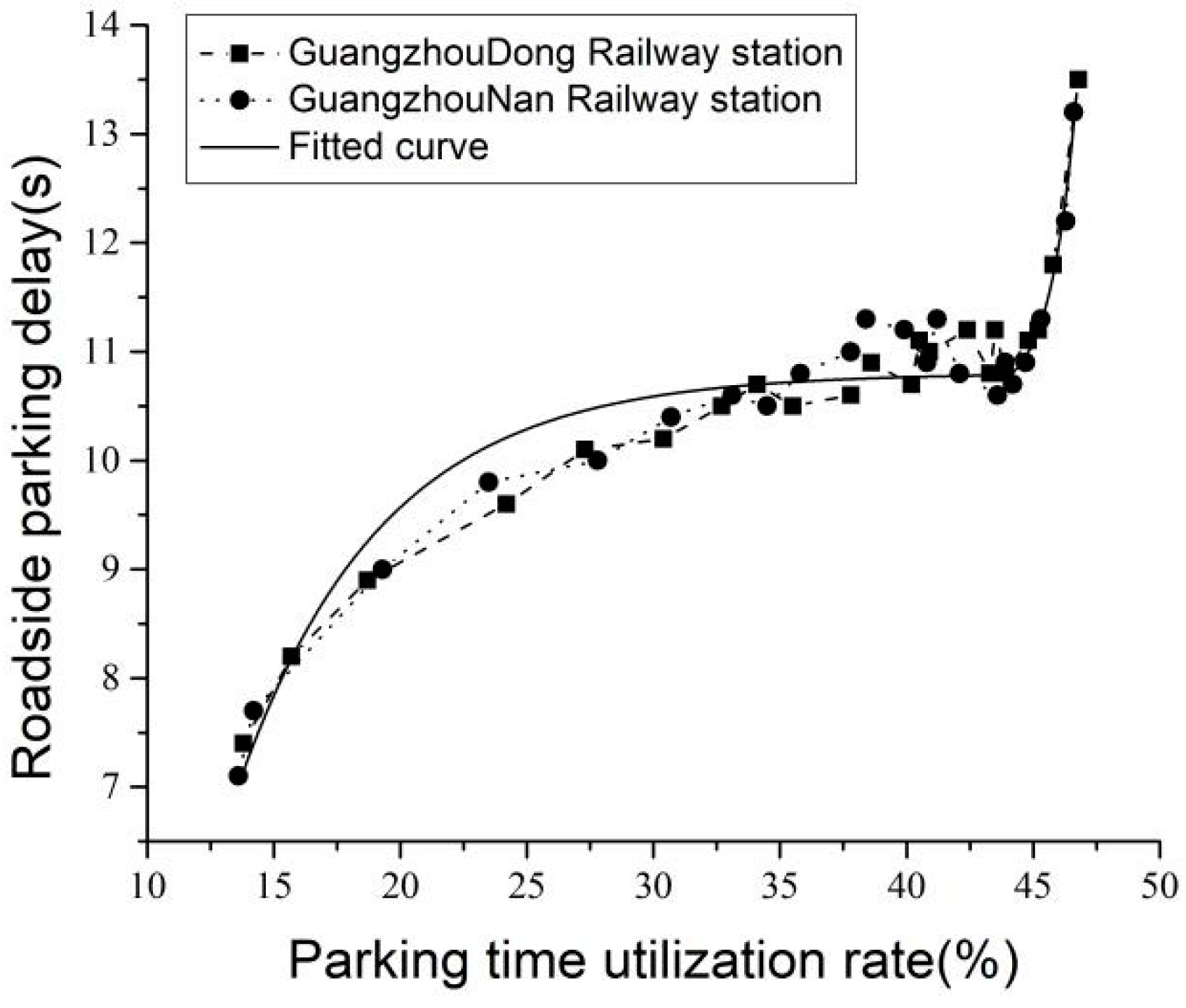
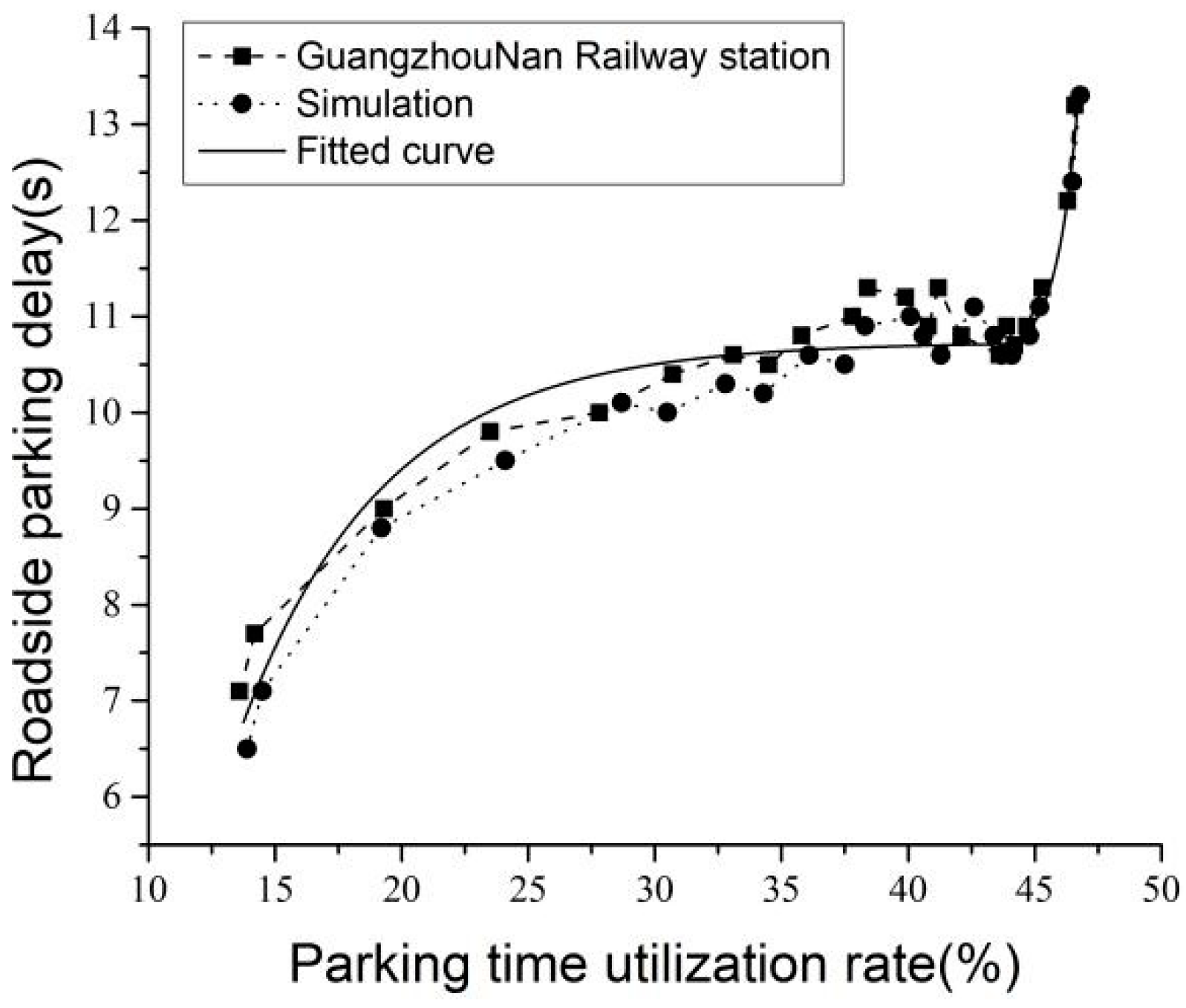
3.4. Roadside Parking Delays
3.5. Parking Time Utilization
4. Model Application and Analysis
4.1. Analysis of the Stability Boundary of the Roadside Parking System
4.2. Construction and Inspection of the Simulation Model of the Roadside Parking System
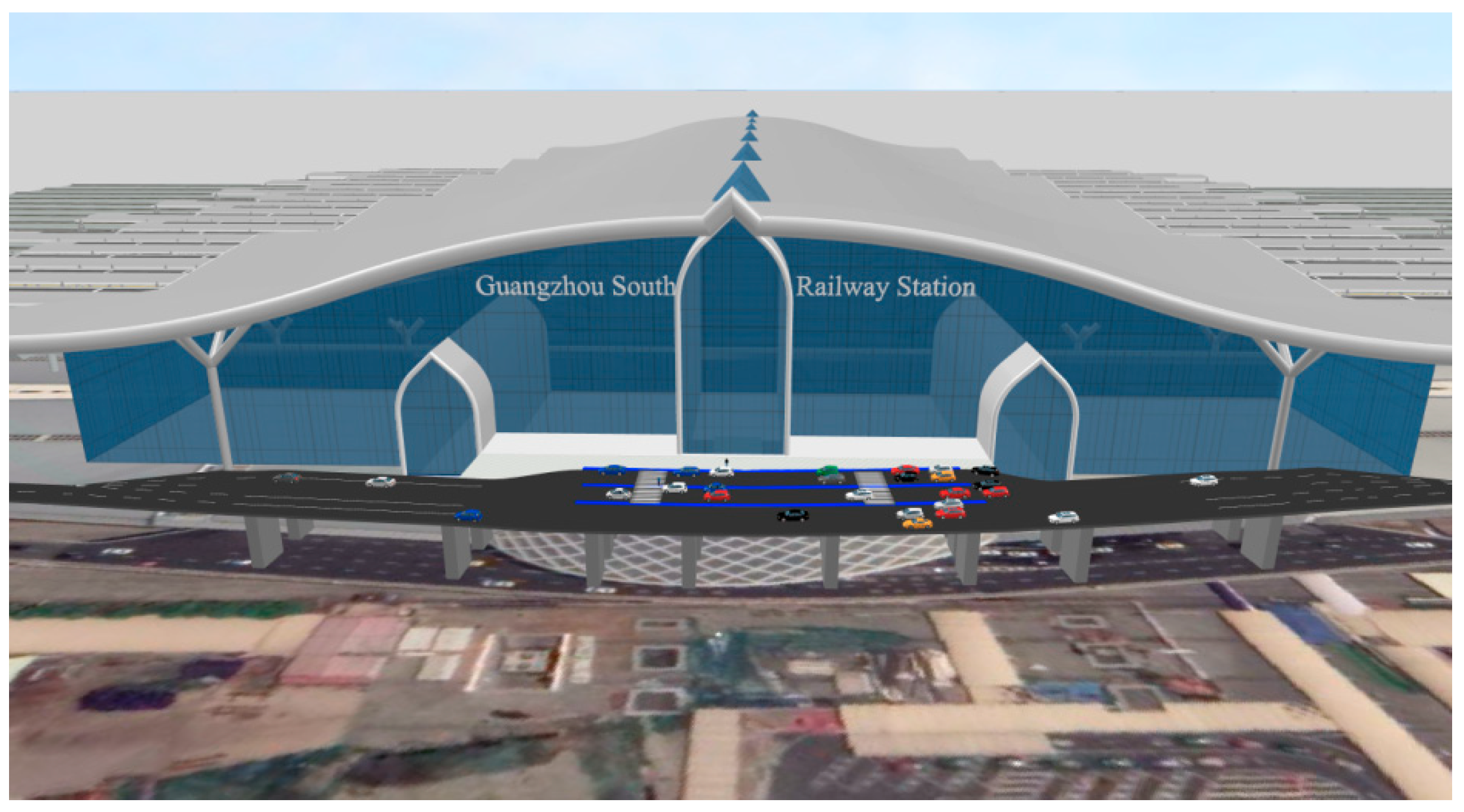
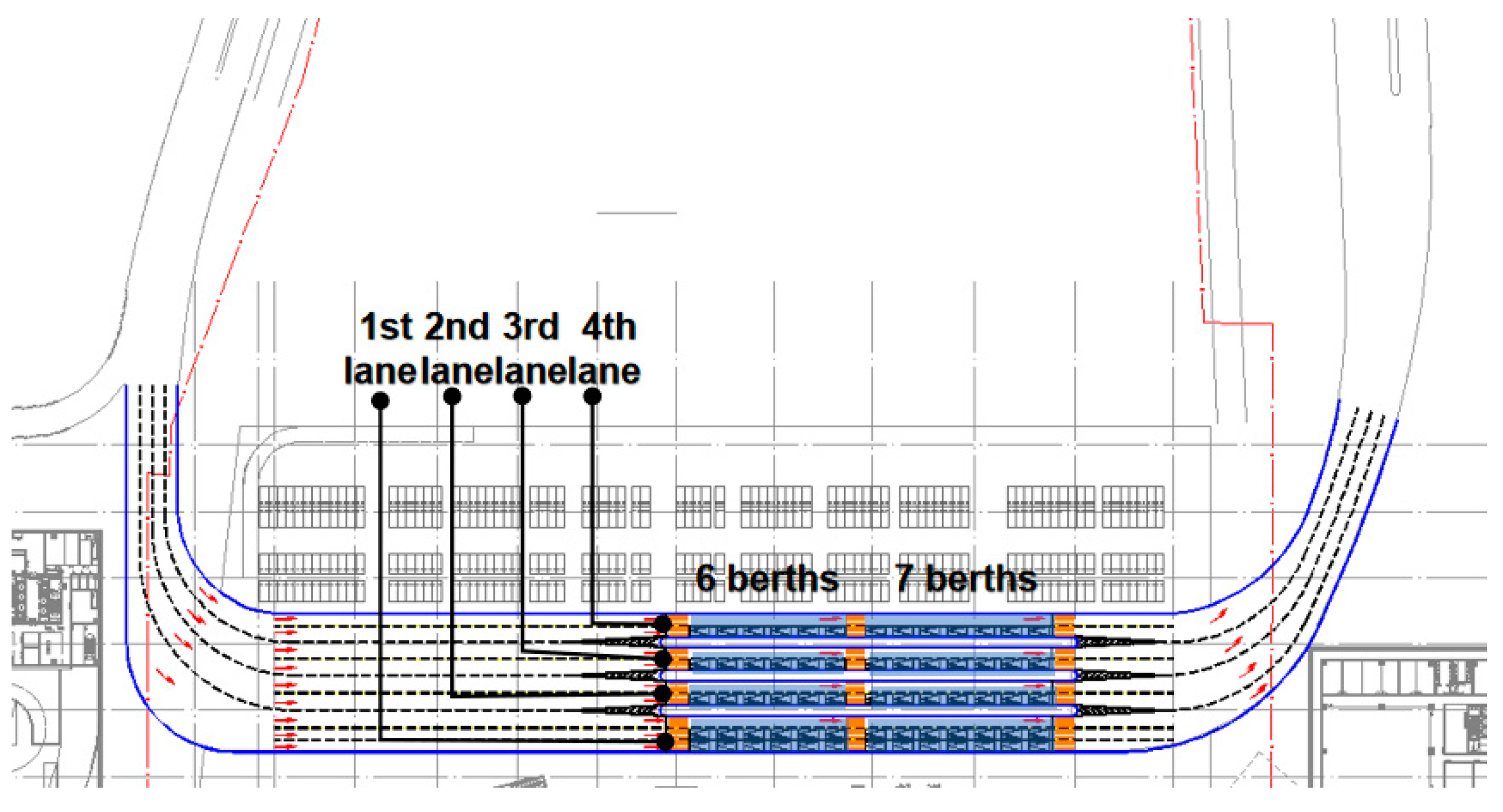
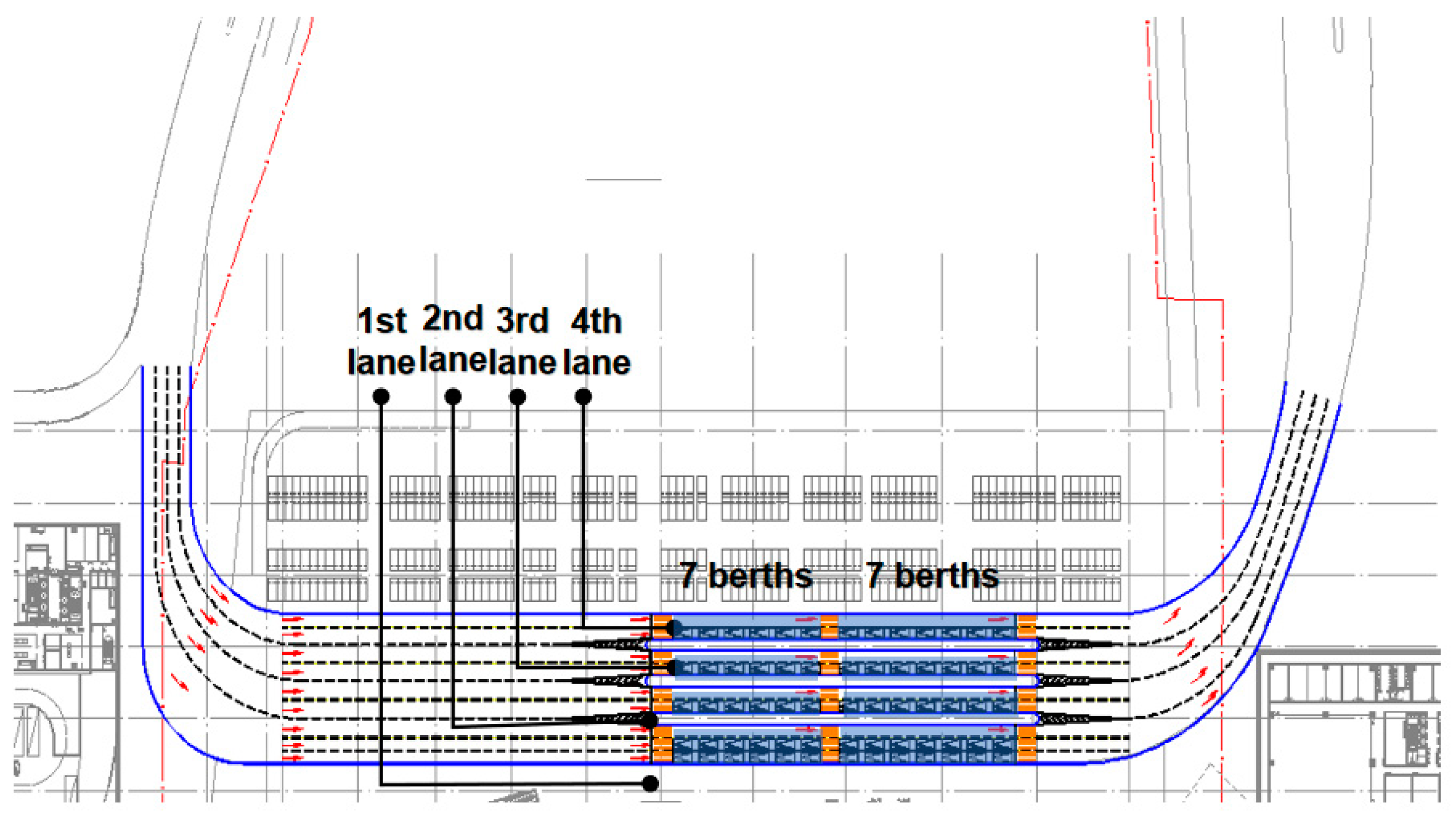
4.3. Simulation Evaluation of the Original Design Scheme of the Newly Built Rail-Integrated Transport Hub
4.4. Simulation Evaluation of the Improved Scheme of the Newly Built Rail-Integrated Transport Hub
5. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Francesca, P.; Filomena, M. The Impact of High-Speed Rail on Tourism with Parametric and Non-Parametric Methods: The Case Study of China. Sustainability 2021, 13, 3416. [Google Scholar]
- Leclercq, L.; Sénécat, A.; Mariotte, G. Dynamic macroscopic simulation of on-street parking search: A trip-based approach. Transp. Res. Part B Methodol. 2017, 101, 268–282. [Google Scholar] [CrossRef] [Green Version]
- Arnott, R. On the optimal target curbside parking occupancy rate. Econ. Transp. 2014, 3, 133–144. [Google Scholar] [CrossRef] [Green Version]
- Cao, J.; Menendez, M. Quantification of potential cruising time savings through intelligent parking services. Transp. Res. Part A Policy Pract. 2018, 116, 151–165. [Google Scholar] [CrossRef]
- Geroliminis, N. Cruising-for-parking in congested cities with an MFD representation. Econ. Transp. 2015, 4, 156–165. [Google Scholar] [CrossRef]
- Zheng, N.; Geroliminis, N. Modeling and optimization of multimodal urban networks with limited parking and dynamic pricing. Transp. Res. Part B Methodol. 2016, 83, 36–58. [Google Scholar] [CrossRef] [Green Version]
- Du, Y.; Yu, S.; Meng, Q. Allocation of street parking facilities in a capacitated network with equilibrium constraints on drivers’ traveling and cruising for parking. Transp. Res. Part C Emerg. Technol. 2019, 101, 181–207. [Google Scholar] [CrossRef]
- Hunt, J.D. Parking location choice: Insights and representations based on observed behaviour and the hierarchical logit modelling formulation. In Proceedings of the Institute of Transportation Engineers (ITE), Annual Meeting, 58th, Vancouver, BC, Canada, 7–10 May 1988. [Google Scholar]
- Bradley, M.; Kroes, E.; Hinloopen, E. A joint model of mode/parking type choice with supply-constrained application. In Proceedings of the PTRC Summer Annual Meeting, 21st, University of Manchester, Manchester, UK, 13–17 September 1993. [Google Scholar]
- Kobus, M.B.W.; Gutierrez-I-Puigarnau, E.; Rietveld, P. The On-Street Parking Premium and Car Drivers’ Choice between Street and Garage Parking. Reg. Urban Econ. 2013, 43, 395–403. [Google Scholar] [CrossRef] [Green Version]
- Boyles, S.D.; Tang, S.P.; Unnikrishan, A. Parking Search Equilibrium on a Network. Transp. Res. Part B Methodol. 2015, 81, 390–409. [Google Scholar] [CrossRef] [Green Version]
- Millard-ball, A.; Weinberger, R.R.; Hampshire, R.C. Is the Curb 80% Full or 20% Empty? Assessing the Impacts of San Francisco’s Parking Pricing Experiment. Transp. Res. Part A Policy Pract. 2014, 63, 76–92. [Google Scholar] [CrossRef]
- Pei, Y.; Yang, Y. Block Delay Model Under the Influence of On-Street Parking in Two-Way Two-Lane Road. Urban Transp. China 2020, 18, 119–126. [Google Scholar]
- Zhao, C.; Zhu, Y. A Real-time Prediction Method of Curbside Parking Occupancy Incorporating Dynamic Management Policies. J. Transp. Syst. Eng. Inf. Technol. 2020, 20, 107–113. [Google Scholar]
- Zhang, Y.; Kong, D. Curb Parking Resource Allocation Method Based on Optimal Road Network Traffic Efficiency. Transp. Res. 2020, 6, 64–73. [Google Scholar] [CrossRef]
- Liu, X.; Wang, L. Cellular automaton traffic flow model considering on-street parking. J. Jilin Univ. (Eng. Technol. Ed.) 2012, 42, 327–333. [Google Scholar]
- Wei, L.; Liang, Y. On Delay Probability and Influence of Inside Road Parking Area Length on Traffic. J. Southwest China Norm. Univ. (Nat. Sci. Ed.) 2016, 5, 115–121. [Google Scholar]
- Yu, P. Design of Intelligent Parking Lots Management System Based on ARM; Guangxi Normal University: Guilin, China, 2015. [Google Scholar]
- Yin, H.; Shen, J.; Zheng, S. Research on Infuential Factors of Parking Demand in Central Business District with Logitsitc Model. J. Dalian Jiaotong Univ. 2017, 38, 25–30. [Google Scholar]
- Zhang, R.; Zhu, L.; Lin, J. Curb Parking Progressive Charging Pricing Model of City Center. J. Tongji Univ. (Nat. Sci.) 2015, 43, 90–95. [Google Scholar]
- Wang, Y.; Jia, S.; Li, J. A Model of Network Assignment for Multi-Mode Travel Considering Roadside Parking Charge Game. J. Transp. Inf. Saf. 2019, 37, 88–94+162. [Google Scholar]
- Li, L.; He, S.; Liang, X. A Method for Forecasting Parking Demand of Complex Under Consistent Feature. J. Tongji Univ. (Nat. Sci.) 2018, 46, 340–345. [Google Scholar]
- Cao, Y.; Yang, Z.; Zuo, Z. The Planning Method of Regional Parking Based on Railway Transit Park-and-ride. J. Transp. Syst. Eng. Inf. Technol. 2016, 16, 153–158. [Google Scholar]
- Holland, J.H. Complex adaptive systems. Daedalus 1992, 121, 17–30. [Google Scholar]
- Chen, X. Simulation Modelling and Its Application of pedestrian Mustering and Evacuation in Rail Transit Hubs; Beijing Jiaotong University: Beijing, China, 2018. [Google Scholar]
- Zhang, J.J. Analysis on the Influence Transmission of Expressway Traffic Accidents under the Environment of Road Network; Chang’an University: Xian, China, 2010. [Google Scholar]
- Cao, Z.Y.; Guo, Z.Y. Research on Time and Spatial Extent of Terrible Traffic Accident on Highway. Highw. Eng. 2011, 36, 56–58. [Google Scholar]
- Ye, X.; Chen, J.; Zhu, R. Modeling Optimal Distance Between Curb Parking Location and Exit of Signal Controlled Intersection. J. Highw. Transp. Res. Dev. 2012, 29, 110–117. [Google Scholar]
- Chen, J.; He, X. Road Traffic Delay Caused by Curb Parking Set in the Influence Area of Signalized Intersection. J. Harbin Inst. Technol. 2009, 41, 130–135. [Google Scholar]
- Poliak, M.; Poliaková, A.; Čulík, K. Impact of the Social Law on Truck Parking Sustainability in the EU. Sustainability 2020, 12, 9430. [Google Scholar] [CrossRef]
- Dong, G.; Zuo, Y. Study on Calculation Model of Number of Queuing Vehicles and Total Delay in Traffic Incidents. Comput. Technol. Autom. 2018, 37, 110–116. [Google Scholar]
- Reynolds, C.W. Open Steer: Steering Behaviors for Autonomous Characters; Miller Freeman Game Group: San Jose, CA, USA, 1999. [Google Scholar]
- Reynolds, C.W.; Flocks, H. And Schools: A Distributed Behavioral Model; ACM: New York, NY, USA, 1987. [Google Scholar]
- Zhang, J.; Cheng, Y. Improvement and lightweight implementation of a crowd evacuation model. Sci. Surv. Mapp. 2017, 42, 183–189. [Google Scholar] [CrossRef]
- Gonzalo, A. The Effect of Introducing Parking Policies on Managing Mobility to Beaches in Touristic Coastal Towns. Sustainability 2019, 11, 3528. [Google Scholar]
- Alessandro, C.; Tom, J.; Antonino, S. Designing a Web Spatial Decision Support System Based on Analytic Network Process to Locate a Freight Lorry Parking. Sustainability 2019, 11, 5629. [Google Scholar]
- Chen, B.; Cheng, H. A review of the applications of agent technology in traffic and transportation systems. IEEE Trans. Intell. Transp. Syst. 2010, 11, 485–497. [Google Scholar] [CrossRef]
- Béhé, S.; Gaud, N. An ontology-based metamodel for multiagent-based simulations. Simul. Model. Pract. Theory 2014, 40, 64–85. [Google Scholar] [CrossRef]
- Chen, X.; Wang, S. Robust Ship Tracking via Multi-view Learning and Sparse Representation. J. Navig. 2019, 72, 176–192. [Google Scholar] [CrossRef]
- Luo, Q.; Zang, X. Research of Vehicle Rear-End Collision Model considering Multiple Factors. Math. Probl. Eng. 2020, 1–11. [Google Scholar] [CrossRef] [Green Version]
- Luo, Q.; Chen, X.; Yuan, J. Study and Simulation Analysis of Vehicle Rear-End Collision Model considering Driver Types. J. Adv. Transp. 2020, 1–11. [Google Scholar] [CrossRef]
- Luo, Q.; Yuan, J.; Chen, X. Research on mixed user equilibrium model based on mobile internet traffic information service. IEEE Access 2019, 7, 164775–164790. [Google Scholar] [CrossRef]
- Chen, X.; Yang, Y.; Wang, S. Ship Type Recognition via a Coarse-to-Fine Cascaded Convolution Neural Network. J. Navig. 2020, 73, 813–832. [Google Scholar] [CrossRef]
- Chen, X. Augmented Ship Tracking Under Occlusion Conditions from Maritime Videos. IEEE Access 2020, 8, 42884–42897. [Google Scholar] [CrossRef]
- Javad, K. Spatial Analysis of Curb-Park Violations and Their Relationship with Points of Interest: A Case Study of Tehran, Iran. Sustainability 2019, 11, 6336. [Google Scholar]
- Majda, I. Decision Support to Sustainable Parking Management—Investment Planning through Parking Fines to Improve Pedestrian Flows. Sustainability 2020, 12, 9485. [Google Scholar]
- Luo, Q.; Yuan, J. Analyzing start-up time headway distribution characteristics at signalized intersections at signalized intersections. Phys. A Stat. Mech. Its Appl. 2019, 535, 1–10. [Google Scholar]












{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Minimum Sample Size | Actual Survey Sample Size | ||||
|---|---|---|---|---|---|
| 100.00 | 1.64 | 3.00 | 6742 | 13,580 | |
| Roadside parking duration(s) | 30.00 | 1.64 | 2.00 | 269 | 3795 |
| Roadside parking delay(s) | 0.45 | 1.64 | 0.05 | 218 | 576 |
| Roadside Parking Delay(s) | Roadside Parking Rate (%) | |
|---|---|---|
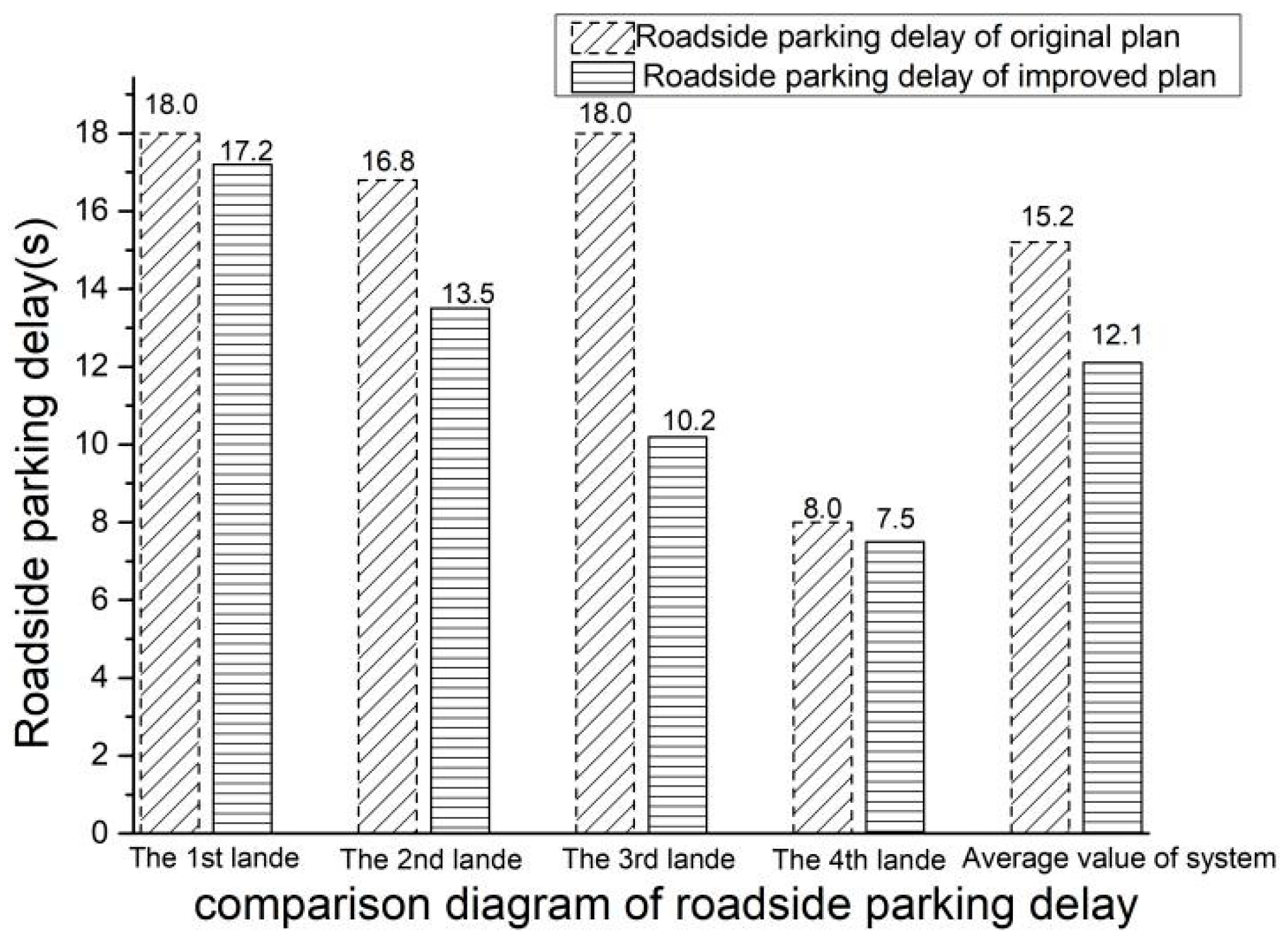
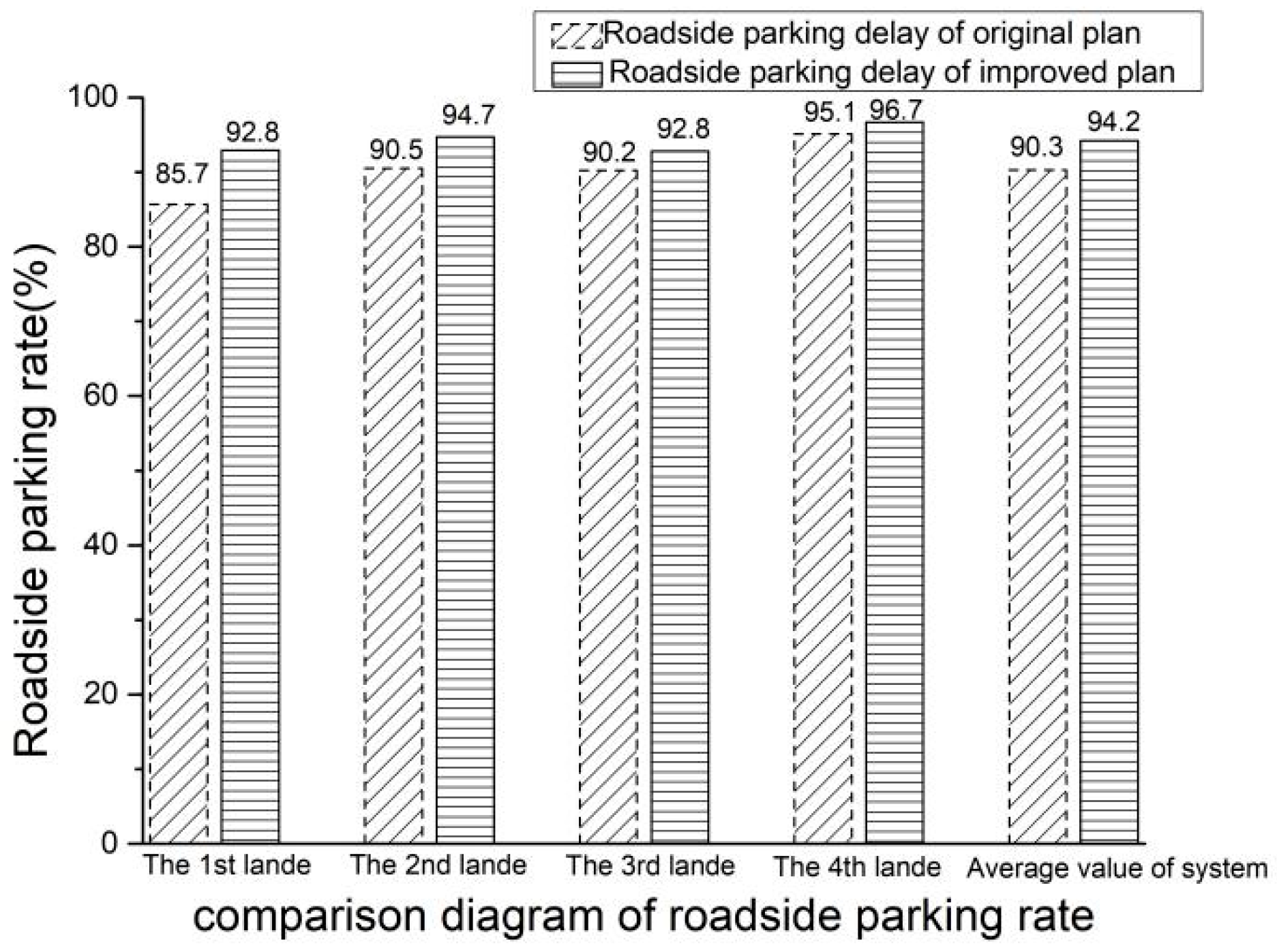
| The 1st lane (north) | 18.0 | 85.7 |
| The 2nd lane (north) | 16.8 | 90.5 |
| The 3rd lane (north) | 18.0 | 90.2 |
| The 4th lane (north) | 8.0 | 95.1 |
| The average value of roadside parking system | 15.2 | 90.3 |
| Roadside Parking Delay(s) | Roadside Parking Rate (%) | |
|---|---|---|
| The 1st lane (north) | 17.2 | 92.8 |
| The 2nd lane (north) | 13.5 | 94.7 |
| The 3rd lane (north) | 10.2 | 92.8 |
| The 4th lane (north) | 7.5 | 96.7 |
| The average value of roadside parking system | 12.1 | 94.2 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Yang, J.; Zang, X.; Luo, Q.; Shao, L. Analysis on Stability of Roadside Parking System in a Rail-Integrated Transport Hub. Sustainability 2021, 13, 4855. https://doi.org/10.3390/su13094855
Yang J, Zang X, Luo Q, Shao L. Analysis on Stability of Roadside Parking System in a Rail-Integrated Transport Hub. Sustainability. 2021; 13(9):4855. https://doi.org/10.3390/su13094855
Chicago/Turabian StyleYang, Junheng, Xiaodong Zang, Qiang Luo, and Liming Shao. 2021. "Analysis on Stability of Roadside Parking System in a Rail-Integrated Transport Hub" Sustainability 13, no. 9: 4855. https://doi.org/10.3390/su13094855