
New Decentralized Control of Mesh AC Microgrids: Study, Stability, and Robustness Analysis


 and
and
Abstract
:1. Introduction
2. Power Sharing and Synchronization Strategies in Mesh Microgrids
2.1. Power Sharing Using Droop Control Strategies
2.2. Synchronization Strategy in Mesh Islanded Microgrid
3. System Modeling for Its Stability Analysis
3.1. State-Space Model of a Distributed Generator (DG)
3.2. Microgrid Structure and Modeling
3.3. Validation of the State Model
4. Mesh Microgrid Stability and Robustness of its Control
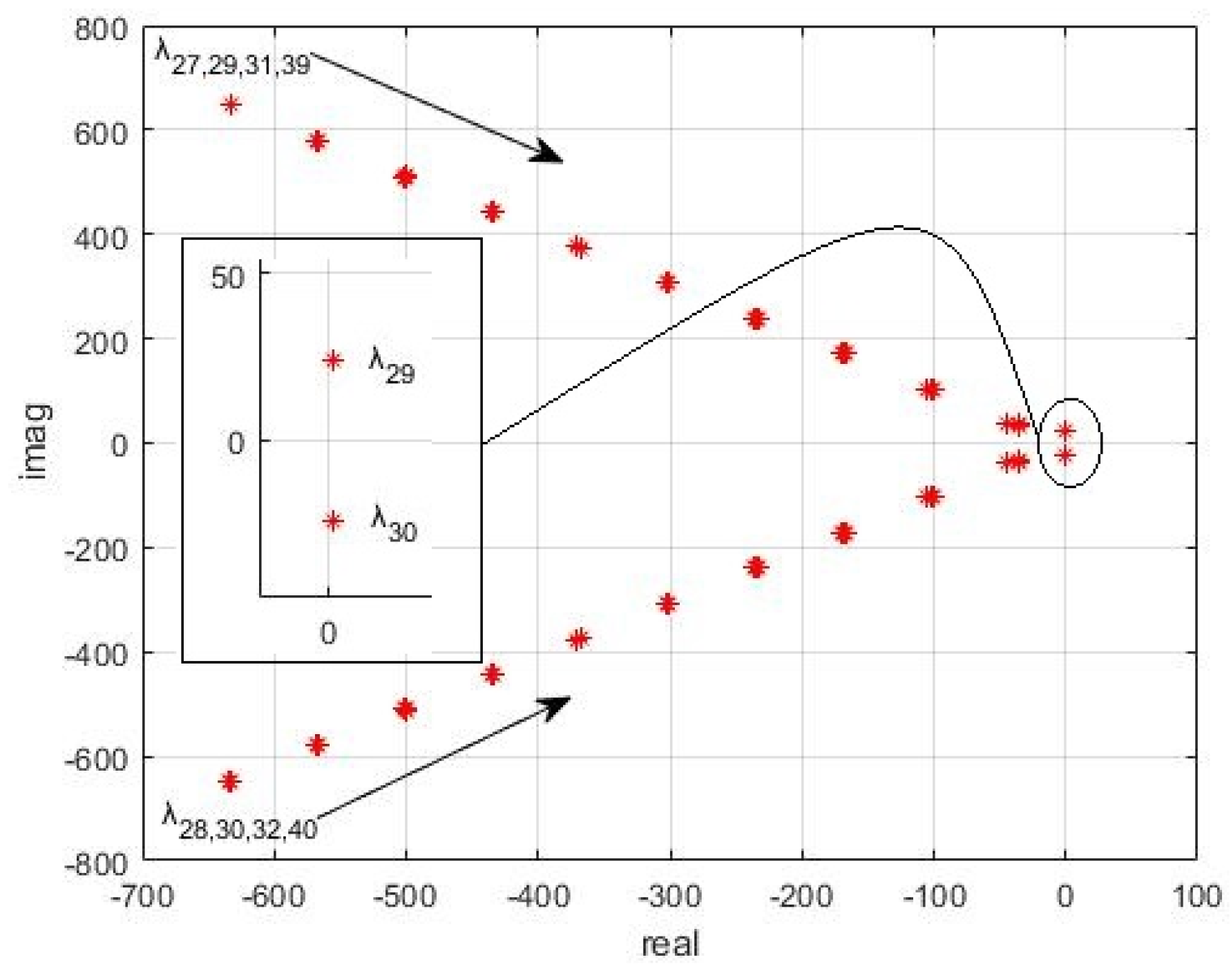
4.1. Jacobian Matrix Eigenvalues
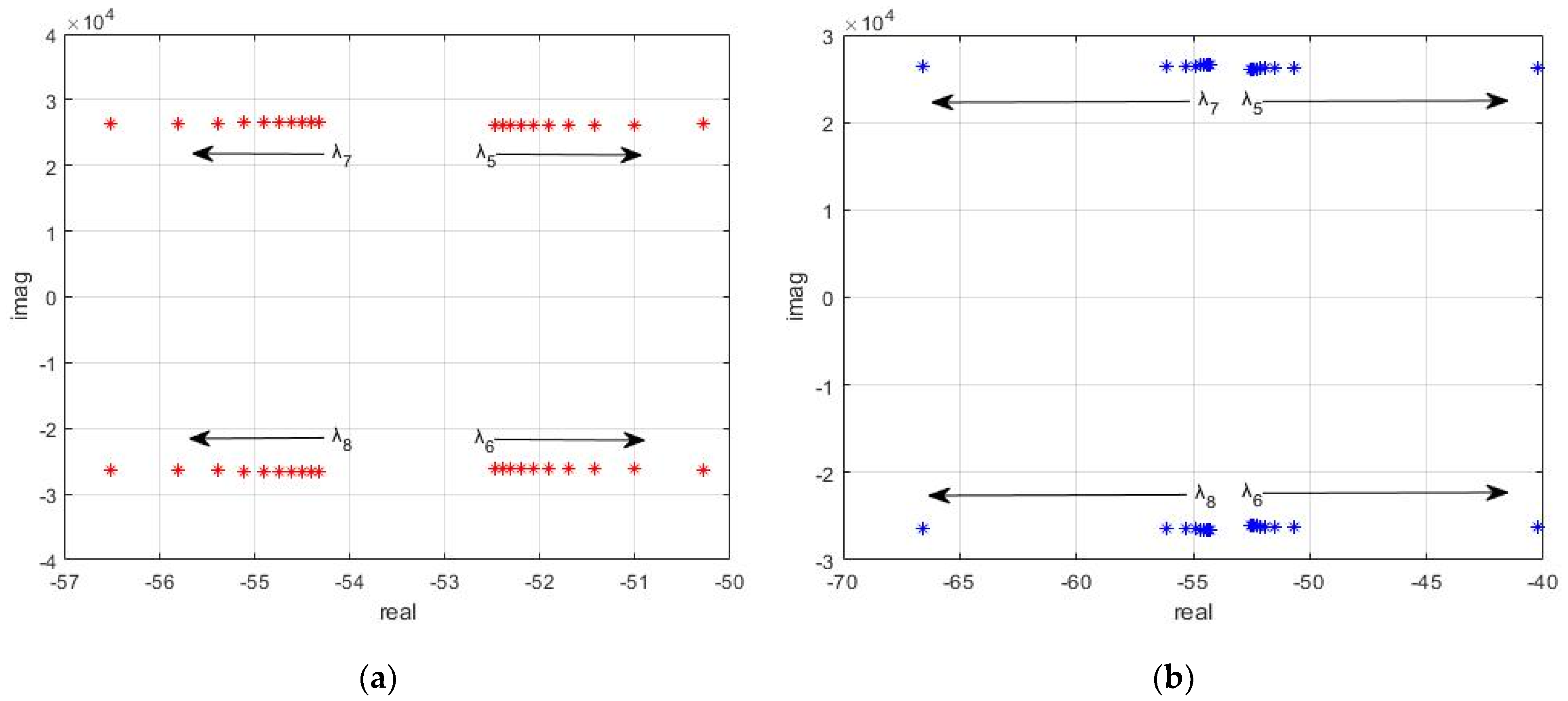
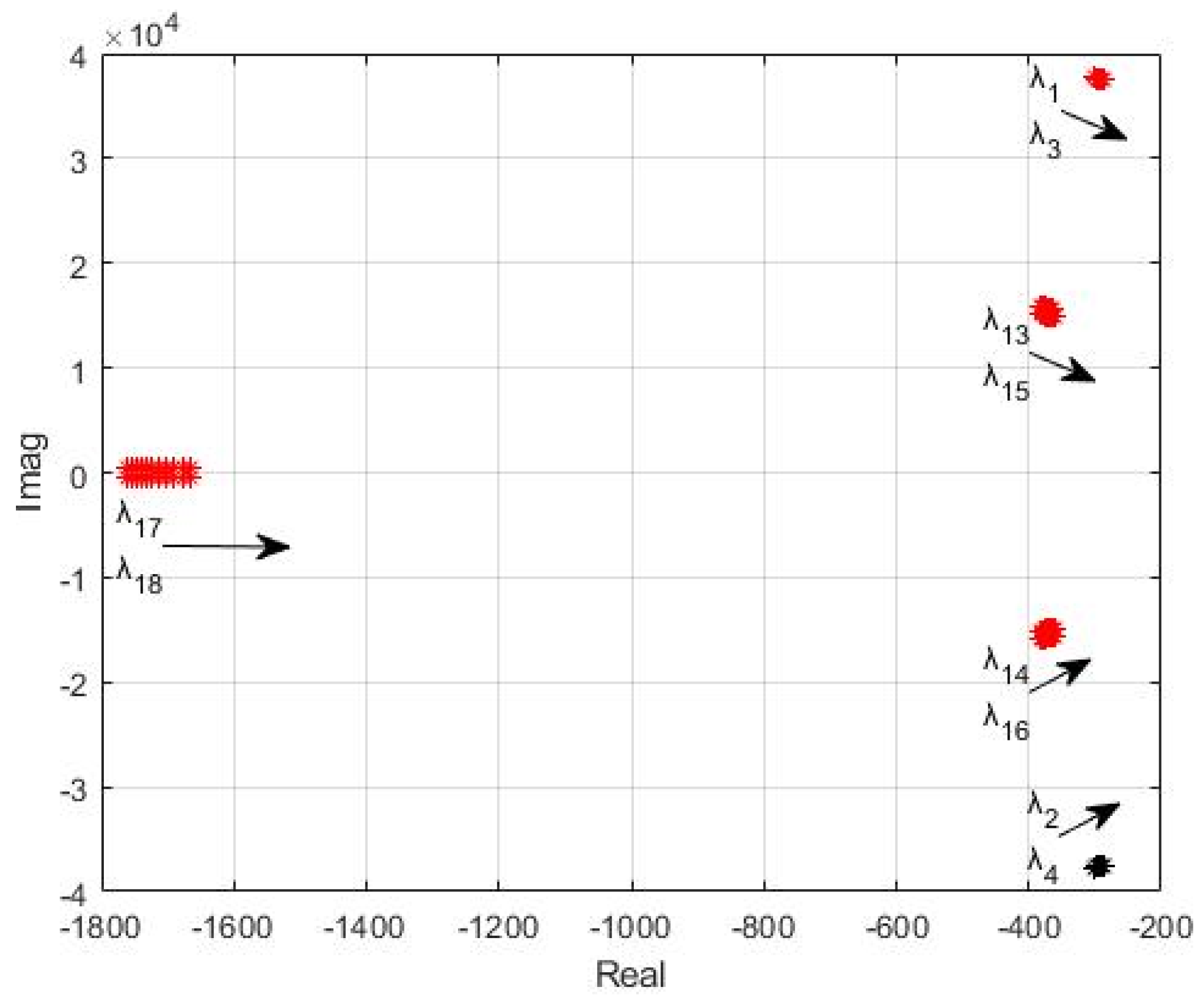
4.2. Eigenvalue Trajectory and Sensibility Analysis for Different Values of Power Line Parameters
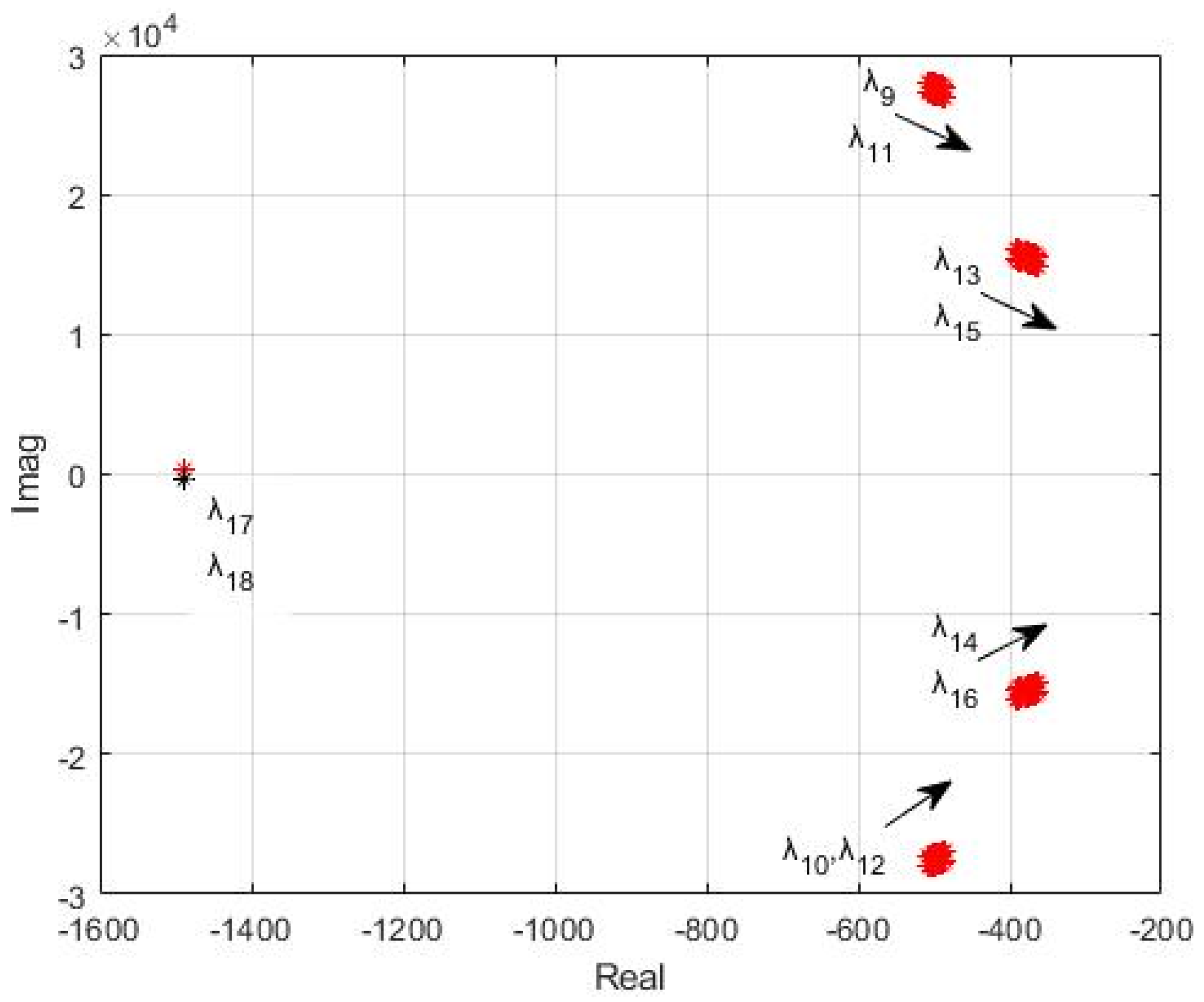
4.3. Eigenvalue Trajectory and Sensibility Analysis for Different Values of DG Parameters
4.4. Eigenvalue Trajectory and Sensibility Analysis for Different Values of Load Parameters
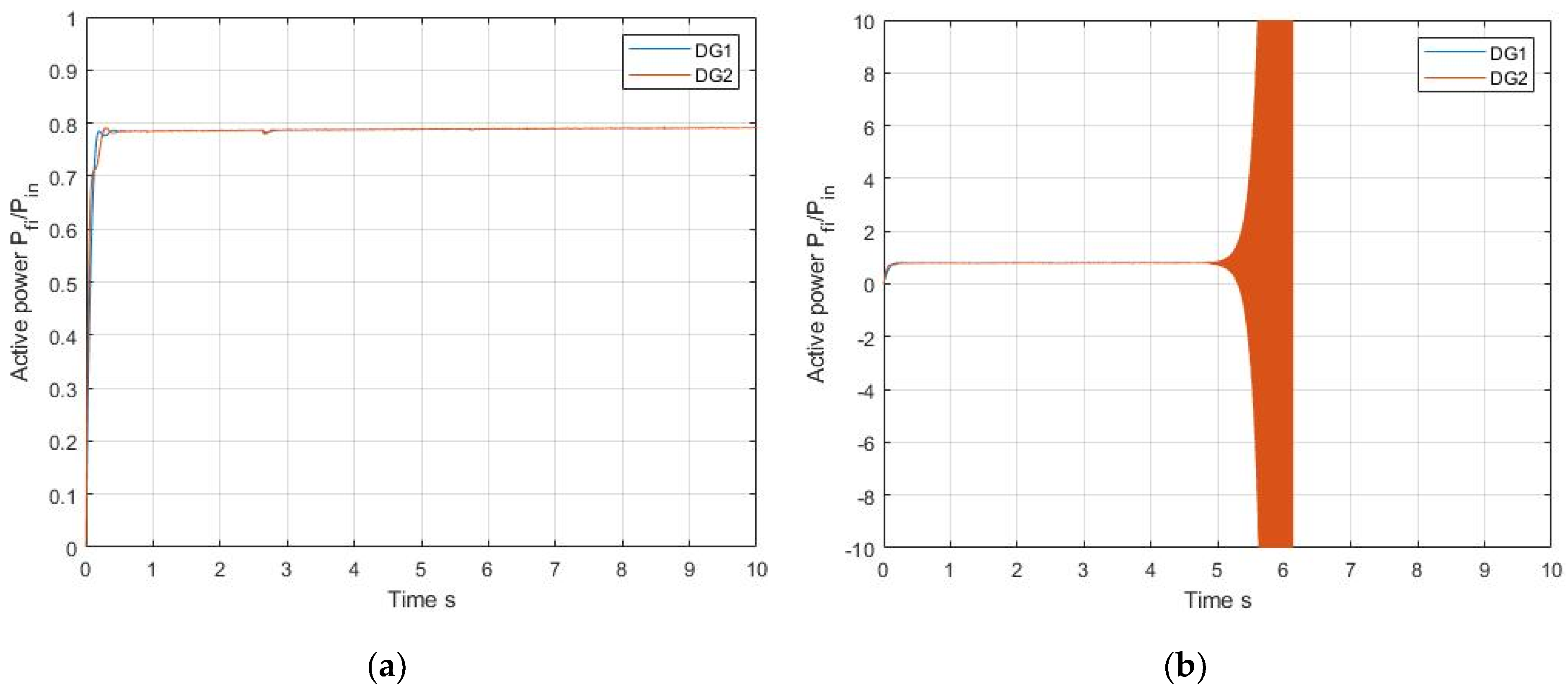
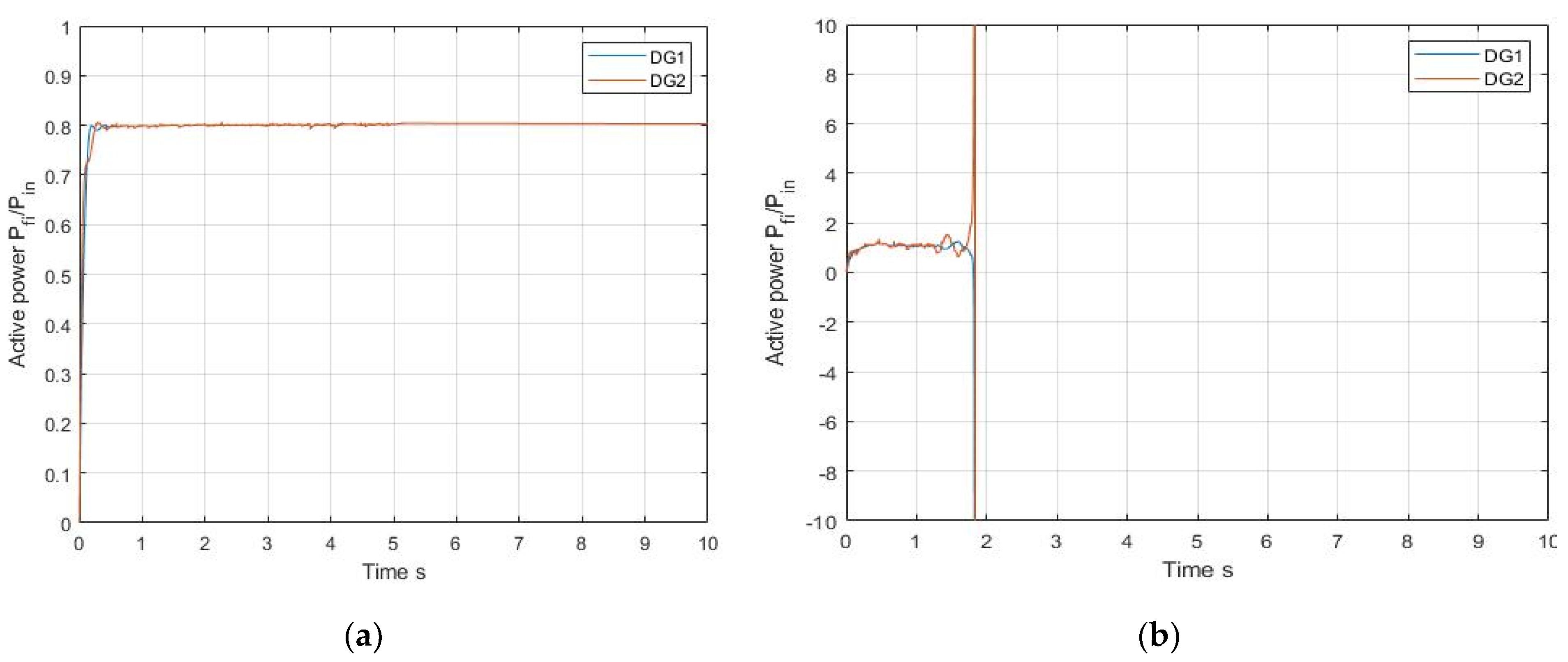
4.5. Mesh Microgrid Control Robustness
5. Discussion
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- El-Khattam, W.; Salama, M.M. Distributed generation technologies, definitions and benefits. Electr. Power Syst. Res. 2004, 71, 119–128. [Google Scholar] [CrossRef]
- Zhang, L.; Harnefors, L.; Nee, H.-P. Power-Synchronization Control of Grid-Connected Voltage-Source Converters. IEEE Trans. Power Syst. 2010, 25, 809–820. [Google Scholar] [CrossRef]
- Haizhen, X.; Xing, Z.; Fang, L.; Debin, Z.; Rongliang, S.; Hua, N.; Wei, C. Synchronization strategy of microgrid from islanded to grid-connected mode seamless transfer. In Proceedings of the IEEE International Conference of IEEE Region 10 (TENCON 2013), Xi’an, China, 22–25 October 2013. [Google Scholar]
- Tayaba, U.B.; Roslan, M.A.B.; Hwai, L.J.; Kashif, M. A review of droop control techniques for microgrid. Renew. Sustain. Energy Rev. 2017, 76, 717–727. [Google Scholar] [CrossRef]
- Xiaofei, X.; Hong, L.; Zhipeng, L. Research on new algorithm of droop control. In Proceedings of the Chinese Control and Decision Conference (CCDC), Guiyang, China, 25–27 May 2013. [Google Scholar]
- Huang, X.; Wang, K.; Qiu, J.; Hang, L.; Li, G.; Wang, X. Decentralized Control of Multi-Parallel Grid-Forming DGs in Islanded Microgrids for Enhanced Transient Performance. IEEE Access 2019, 7, 17958–17968. [Google Scholar] [CrossRef]
- Han, H.; Hou, X.; Yang, J.; Wu, J.; Su, M.; Guerrero, J.M. Review of Power Sharing Control Strategies for Islanding Operation of AC Microgrids. IEEE Trans. Smart Grid 2016, 7, 200–215. [Google Scholar] [CrossRef] [Green Version]
- Moussa, H.; Shahin, A.; Martin, J.-P.; Pierfederici, S.; Moubayed, N. Optimal angle droop for power sharing enhancement with stability improvement in islanded microgrids. IEEE Trans. Smart Grid 2017, 9, 5014–5026. [Google Scholar] [CrossRef]
- Dheer, D.K.; Kulkarni, O.V.; Doolla, S.; Rathore, A.K. Effect of Reconfiguration and Meshed Networks on the Small-Signal Stability Margin of Droop-Based Islanded Microgrids. IEEE Trans. Ind. Appl. 2018, 54, 2821–2833. [Google Scholar] [CrossRef]
- Trivedi, A.; Singh, M. Adaptive Droop Control for AC Microgrid with Small Mesh Network. IEEE Trans. Ind. Electron. 2018, 65, 4781–4789. [Google Scholar] [CrossRef]
- Zhu, Y.; Zhuo, F.; Shi, H. Accurate power sharing strategy for complex microgrid based on droop control method. In Proceedings of the IEEE 10th International Symposium on Power Electronics for Distributed Generation Systems (PEDG), Xi’an, China, 3–6 June 2019. [Google Scholar]
- Jiao, J.; Guo, S.; Tan, C.; Xue, Y.; Hua, X. Research on Improved Droop Control Method of DC Microgrid Based on Voltage Compensation. In Proceedings of the 2020 5th International Conference on Power and Renewable Energy (ICPRE), Shanghai, China, 12–14 September 2020; pp. 391–395. [Google Scholar] [CrossRef]
- Jusoh, A.B. The instability effect of constant power loads. In Proceedings of the National Power and Energy Conference PECon 2004, Kuala Lumpur, Malaysia, 29–30 November 2004; pp. 175–179. [Google Scholar]
- Cespedes, M.; Xing, L.; Sun, J. Constant-power load system stabilization by passive damping. IEEE Trans. Power Electron. 2011, 26, 1832–1836. [Google Scholar] [CrossRef]
- Marx, D.; Magne, P.; Nahid-Mobarakeh, B.; Pierfederici, S.; Davat, B. Large signal stability analysis tools in DC power systems with constant power loads and variable power loads—A review. IEEE Trans. Power Electron. 2012, 27, 1773–1787. [Google Scholar] [CrossRef]
- Kabalan, M.; Singh, P.; Niebur, D. Large signal Lyapunov-based stability studies in microgrids: A review. IEEE Trans. Smart Grid 2016, 8, 2287–2295. [Google Scholar] [CrossRef]
- Bottrell, N.; Prodanovic, M.; Green, C.T. Dynamic stability of a microgrid with an active load. IEEE Trans. Power Electron. 2013, 28, 5107–5119. [Google Scholar] [CrossRef] [Green Version]
- Rasheduzzaman, M.; Mueller, J.A.; Kimball, W.J. An accurate small-signal model of inverter- dominated islanded microgrids using dq reference frame. IEEE J. Emerg. Sel. Top. Power Electron. 2014, 2, 1070–1080. [Google Scholar] [CrossRef]
- Hennane, Y.; Martin, J.; Berdai, A.; Pierfederici, S.; Meibody-Tabar, F. Power Sharing and Synchronization Strategies for Multiple PCC Islanded Microgrids. Int. J. Electr. Electron. Eng. Telecommun. 2020, 9, 156–162. [Google Scholar] [CrossRef]






























{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Lines | Resistance (Ω) | Inductance (mH) | Capacitance (µF) | Points of Connections |
|---|---|---|---|---|
| Line 1 | 0.63 | 7.14 | 205 | Bus 8–Bus 7 |
| Line 2 | 2.55 | 11.4 | 230 | Bus 5–Bus 7 |
| Line 3 | 0.63 | 7.14 | 205 | Bus 8–Bus 9 |
| Line 4 | 2 | 7 | 180 | Bus 9–Bus 6 |
| Line 5 | 1.7 | 7.6 | 153.4 | Bus 4–Bus 5 |
| Line 6 | 1.7 | 7.6 | 153.4 | Bus 4–Bus 6 |
| Sources and Loads | Active Power (Mw) | Reactive Power (Mvar) | Phase to Phase Voltage (kV) | Point of Connection |
|---|---|---|---|---|
| Source 1 | 3 | 0.9 | 6 | Bus 7 |
| Source 2 | 2 | 0.9 | 6 | Bus 9 |
| Load 1 | 1.5 | 0.35 | 20 | Bus 5 |
| Load 2 | 1.2 | 0.25 | 20 | Bus 6 |
| Load 3 | 1 | 0.25 | 20 | Bus 8 |
| Lines | Resistance (Ω) | Inductance (mH) | Capacitance (µF) | Points of Connection |
|---|---|---|---|---|
| Line 13 | 0.63 | 7.14 | 205 | PCC1–PCC3 |
| line 23 | 0.63 | 7.14 | 205 | PCC2–PCC3 |
| line 14 | 2.55 | 11.4 | 230 | PCC1–PCC4 |
| line 25 | 2 | 7 | 180 | PCC5–PCC2 |
| line 56 | 1.7 | 7.6 | 153.4 | PCC5–PCC6 |
| line 46 | 1.7 | 7.6 | 153.4 | PCC4–PCC6 |
| Serial RL Loads | Resistance (Ω) | Inductance (H) |
|---|---|---|
| Load 1 | 376.47 | 0.2496 |
| Load 2 | 319.467 | 0.1765 |
| Load 3 | 252.8977 | 0.1564 |
| Load CPL | Pc = 100 KW | Qc = 0 VAR |
| DGs | Rated Active Power (MW) | Rated Reactive Power (Mvar) | Rated Phase to Phase Voltage (kV) | Cut-Off Frequency Power Calculation Filter (rad/s) | Cut-Off Frequency Second Order Filter (rad/s) | Damping Factor | Permissible Variations of Pulsation (for Droop Control) | Permissible Variations of Voltage (for Droop Control) |
|---|---|---|---|---|---|---|---|---|
| DG1 | ||||||||
| DG2 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Hennane, Y.; Berdai, A.; Martin, J.-P.; Pierfederici, S.; Meibody-Tabar, F. New Decentralized Control of Mesh AC Microgrids: Study, Stability, and Robustness Analysis. Sustainability 2021, 13, 2243. https://doi.org/10.3390/su13042243
Hennane Y, Berdai A, Martin J-P, Pierfederici S, Meibody-Tabar F. New Decentralized Control of Mesh AC Microgrids: Study, Stability, and Robustness Analysis. Sustainability. 2021; 13(4):2243. https://doi.org/10.3390/su13042243
Chicago/Turabian StyleHennane, Youssef, Abdelmajid Berdai, Jean-Philippe Martin, Serge Pierfederici, and Farid Meibody-Tabar. 2021. "New Decentralized Control of Mesh AC Microgrids: Study, Stability, and Robustness Analysis" Sustainability 13, no. 4: 2243. https://doi.org/10.3390/su13042243