
Evaluation of Tree-Based Machine Learning Algorithms for Accident Risk Mapping Caused by Driver Lack of Alertness at a National Scale

 , ,
, , 
Abstract
:1. Introduction
2. Materials and Methods
2.1. Methodology
2.2. Study Area
2.3. Spatial Database
2.3.1. Accident Dataset
2.3.2. Effective Criteria Dataset
- Distance to the city: In Iran, 60% of RTA occurs within 30 km of cities. Several types of traffic flows occur at the city entrance/exit areas, which result in the different performance of drivers. This causes heterogeneous vehicular traffic and, consequently, accidents [75]. Since distance to the city correlates with high accident risk at the city entrance/exit areas and driving duration, it was selected for modeling.
- Distance to the gas station: Refueling the vehicle prevents a long period of driving. Besides, most of the roadside gas stations in Iran have facilities such as supermarket, coffee, parking, etc., and many drivers rest at these places. This prevents the driver from losing alertness and reduces the risk of accidents. To apply this criterion, the distance to the gas station was selected as the modeling criterion.
- Land use/cover: The surrounding environment of the road influence the level of driver alertness. Each land-use/cover type has a different visual diversity which can make the road environment monotonous or absorbing. Thus, land use/cover was selected as an effective criterion for spatial modeling. Using Landsat 8 satellite images in ENVI 5.1 software and the maximum likelihood classification method, the land-use/cover map was prepared. According to experts, all land-use/cover types were weighted (Table 3). With these weights, a map of this criterion with a pixel size of 30 × 30 m was prepared.
- Road structure: Generally, three structure types of bridge, tunnel, and normal road were in the study area. According to Iran’s Highway Geometric Design Code (No. 415), each of the road constructions mentioned above has its own set of requirements, such as speed limits, lighting conditions, curvature, and slope limitations, all of which affect driving conditions [76]. Since a change in the driving situation can influence the driver alertness, road structure type was chosen for spatial modeling. According to experts, bridges labeled 1, normal roads labeled 0.5, and tunnels were labeled 0 in modeling.
- Road type: There are specific standards for the construction of any road type. These standards define limitations for geometric road characteristics such as slope, curvature, speed limit, and road width [76]. As the geometry and characteristics of the road affect the level of driver alertness, the road type was chosen as an effective criterion in modeling. To apply the effect of this criterion in modeling, experts assigned a weight to each road type, as listed in Table 3.
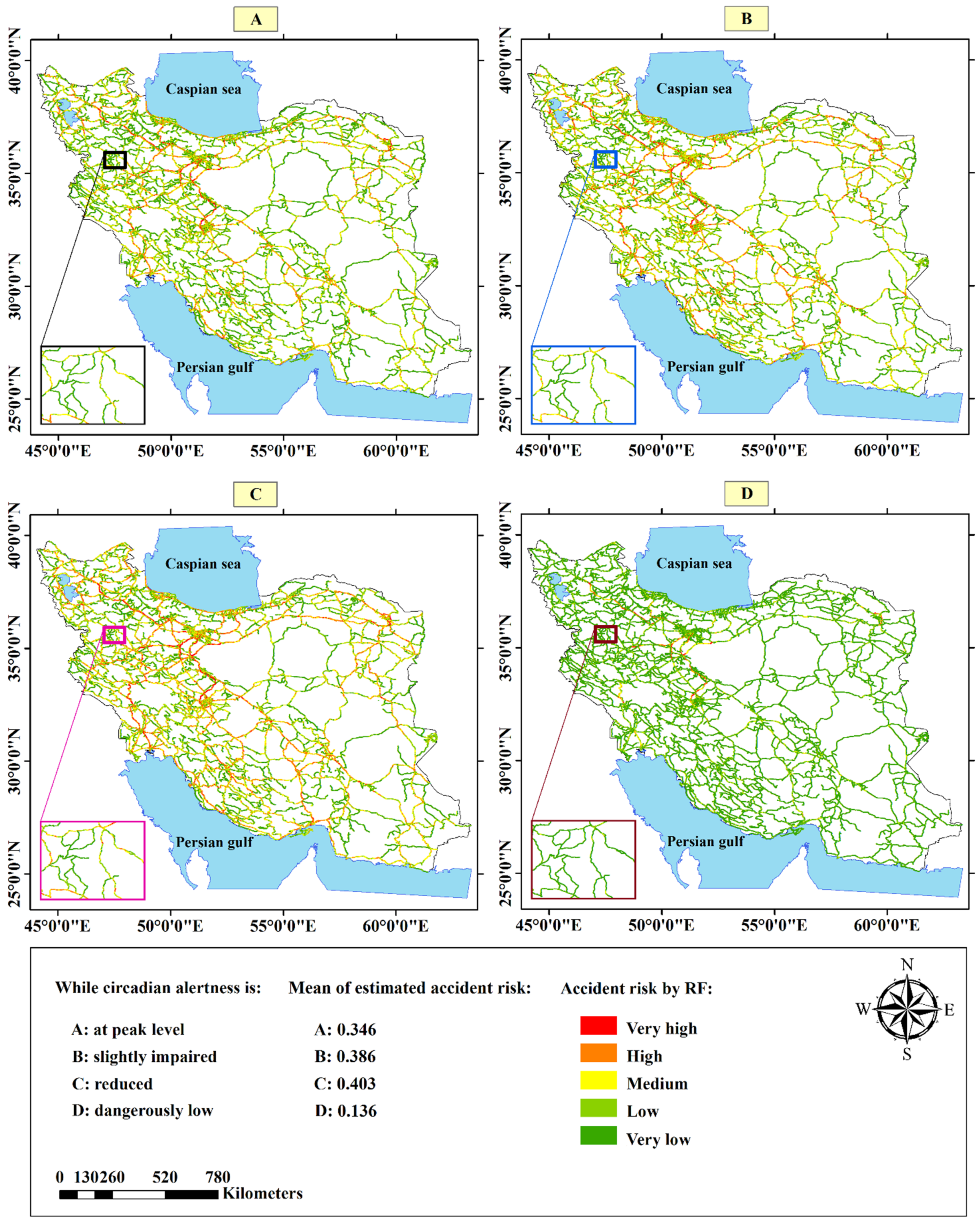
- Time of day: Time of day is an associated factor with driver alertness [65]. Accident data records were divided into four classes (Figure 3) based on a typical circadian rhythm with peak alertness at around 8:00 p.m. and 10 a.m. [77], and all classes were weighted (Table 3). The detailed classes and the number of accidents per class are listed in Table 4.
- Traffic direction: Traffic flow affects the level of driver alertness [78]. Drivers are used to getting visual information about traffic situations, and this behavior is associated with their alertness level [63]. In general, there are two types of traffic direction (one-way and two-way) that make different conditions both for traffic flow and visual traffic situations. In modeling, one-way roads were labeled 1, and two-way roads were labeled 0.
- Slope: Road geometry is significantly affected by the terrain slope. Increasing the slope makes the road geometry more varied [10]. Moreover, changing the slope make drivers careful to control their speed [45]. These led to the choice of slope as an effective criterion in modeling. The global multi-resolution terrain elevation data (GMTED 2010), with a resolution of 225 m, were used to obtain slope values.


{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Criterion | Value/Weight |
|---|---|
| Distance to the city | Normalized in the range of [0, 1] |
| Distance to the gas station | Normalized in the range of [0, 1] |
| Land use/cover | Bare land and desert = 1 Rock, salt land, and sand dune = 0.8 Agriculture, and range = 0.6 Wetland = 0.4 Forest and shoreline = 0.2 Urban = 0 |
| Road structure | Bridge = 1 Normal road = 0.5 Tunnel = 0 |
| Road type | Freeway = 1 Highway = 0.65 Primary road = 0.3 Secondary road = 0 |
| Time of day | 05:00–06:00 = 1 24:00–05:00, 06:00–07:00, and 13:30–16:00 = 0.66 07:00–08:00, 10:00–13:30, 16:00–17:00, and 21:00–24:00 = 0.33 08:00–10:00, and 17:00–21:00 = 0 |
| Traffic direction | One-way = 1 Two-way = 0 |
| Slope | Normalized in the range of [0, 1] |
| Class | Time | Number of Accidents |
|---|---|---|
| While circadian alertness is dangerously low | 05:00–06:00 | 203 (4.62%) |
| While circadian alertness is slightly impaired | 24:00–05:00, 06:00–07:00, and 13:30–16:00 | 1684 (38.28%) |
| While circadian alertness is reduced | 07:00–08:00, 10:00–13:30, 16:00–17:00, and 21:00–24:00 | 1490 (33.87%) |
| While circadian alertness is at peak level | 08:00–10:00, and 17:00–21:00 | 1022 (23.23%) |
2.4. Methods
2.4.1. Data Preprocessing
2.4.2. Bagged Decision Trees Algorithm
2.4.3. Extra Trees Algorithm
2.4.4. Random Forest Algorithm
2.5. Validation
2.5.1. K-Fold Cross-Validation
2.5.2. Validation Metrics
3. Results
3.1. Accident-Risk Mapping
3.2. Identification and Prioritizing of Accident-Prone Locations
3.3. Correlation between Accident Risks at Different Times of Day
3.4. Spatial Features’ Importance
3.5. Models Validation
3.6. Evaluation of Hyper Parameters Tuning
4. Discussion
5. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- WHO Global Status Report on Road Safety 2018. Available online: https://www.who.int/publications-detail/global-status-report-on-road-safety-2018 (accessed on 17 June 2018).
- Bhalla, K.; Naghavi, M.; Shahraz, S.; Bartels, D.; Murray, C.J. Building national estimates of the burden of road traffic injuries in developing countries from all available data sources: Iran. Inj. Prev. 2009, 15, 150–156. [Google Scholar] [CrossRef] [Green Version]
- IRMTO Statistical Yearbook of the Road Maintenance and Transportation Organization 2020. Available online: http://rmto.ir/Pages/SalnameAmari.aspx (accessed on 16 February 2021).
- Behnood, H.R.; Haddadi, M.; Sirous, S.; Ainy, E.; Rezaei, R. Medical costs and economic burden caused by road traffic injuries in Iran. Trauma Mon. 2017, 22. [Google Scholar] [CrossRef] [Green Version]
- Sargazi, A.; Sargazi, A.; Jim, P.K.N.; Danesh, H.; Aval, F.; Kiani, Z.; Lashkarinia, A.; Sepehri, Z. Economic burden of road traffic accidents; report from a single center from south Eastern Iran. Bull. Emerg. Trauma 2016, 4, 43. [Google Scholar]
- Gorea, R. Financial impact of road traffic accidents on the society. Int. J. Ethics Trauma Vict. 2016, 2, 6–9. [Google Scholar] [CrossRef]
- Lee, J.; Chae, J.; Yoon, T.; Yang, H. Traffic accident severity analysis with rain-related factors using structural equation modeling—A case study of Seoul City. Accid. Anal. Prev. 2018, 112, 1–10. [Google Scholar] [CrossRef] [PubMed]
- Hazaa, M.A.; Saad, R.M.; Alnaklani, M.A. Prediction of Traffic Accident Severity using Data Mining Techniques in IBB Province, Yemen. Int. J. Softw. Eng. Comput. Syst. 2019, 5, 77–92. [Google Scholar] [CrossRef]
- Chen, M.-M.; Chen, M.-C. Modeling road accident severity with comparisons of logistic regression, decision tree and random forest. Information 2020, 11, 270. [Google Scholar] [CrossRef]
- Farhangi, F.; Sadeghi-Niaraki, A.; Nahvi, A.; Razavi-Termeh, S.V. Spatial modeling of accidents risk caused by driver drowsiness with data mining algorithms. Geocarto Int. 2020, 1–15. [Google Scholar] [CrossRef]
- Driss, M.; Benabdeli, K.; Saint-Gerand, T.; Hamadouche, M. Traffic safety prediction model for identifying spatial degrees of exposure to the risk of road accidents based on fuzzy logic approach. Geocarto Int. 2015, 30, 243–257. [Google Scholar] [CrossRef]
- Bhowmik, T.; Yasmin, S.; Eluru, N. Do we need multivariate modeling approaches to model crash frequency by crash types? A panel mixed approach to modeling crash frequency by crash types. Anal. Methods Accid. Res. 2019, 24, 100107. [Google Scholar] [CrossRef]
- Zhang, X.; Waller, S.T.; Jiang, P. An ensemble machine learning-based modeling framework for analysis of traffic crash frequency. Comput.-Aided Civ. Infrastruct. Eng. 2020, 35, 258–276. [Google Scholar] [CrossRef]
- Al-Radaideh, Q.A.; Daoud, E.J. Data mining methods for traffic accident severity prediction. Int. J. Neural Netw. Adv. Appl. 2018, 5, 1–12. [Google Scholar]
- Erdogan, S.; Yilmaz, I.; Baybura, T.; Gullu, M. Geographical information systems aided traffic accident analysis system case study: City of Afyonkarahisar. Accid. Anal. Prev. 2008, 40, 174–181. [Google Scholar] [CrossRef] [PubMed]
- El Naqa, I.; Murphy, M.J. What is machine learning? In Machine Learning in Radiation Oncology; Springer: Berlin/Heidelberg, Germany, 2015; pp. 3–11. [Google Scholar]
- Yang, L.; Shami, A. On hyperparameter optimization of machine learning algorithms: Theory and practice. Neurocomputing 2020, 415, 295–316. [Google Scholar] [CrossRef]
- Witten, I.H.; Frank, E. Data mining: Practical machine learning tools and techniques with Java implementations. Acm Sigmod Rec. 2002, 31, 76–77. [Google Scholar] [CrossRef]
- Ardabili, S.; Mosavi, A.; Várkonyi-Kóczy, A.R. Advances in Machine Learning Modeling Reviewing Hybrid and Ensemble. In Engineering for Sustainable Future; Springer: Berlin/Heidelberg, Germany, 2019; pp. 215–227. [Google Scholar]
- Hegde, J.; Rokseth, B. Applications of machine learning methods for engineering risk assessment—A review. Saf. Sci. 2020, 122, 104492. [Google Scholar] [CrossRef]
- Al-Dogom, D.; Aburaed, N.; Al-Saad, M.; Almansoori, S. Spatio-temporal analysis and machine learning for traffic accidents prediction. In Proceedings of the 2019 2nd International Conference on Signal Processing and Information Security (ICSPIS), Dubai, UAE, 30–31 October 2019; IEEE: Piscataway, NJ, USA, 2019; pp. 1–4. [Google Scholar]
- Wang, C.; Liu, L.; Xu, C.; Lv, W. Predicting future driving risk of crash-involved drivers based on a systematic machine learning framework. Int. J. Environ. Res. Public Health 2019, 16, 334. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Ziakopoulos, A.; Yannis, G. A review of spatial approaches in road safety. Accid. Anal. Prev. 2020, 135, 105323. [Google Scholar] [CrossRef]
- Silva, P.B.; Andrade, M.; Ferreira, S. Machine learning applied to road safety modeling: A systematic literature review. J. Traffic Transp. Eng. 2020, 7, 775–790. [Google Scholar]
- Lee, J.; Yoon, T.; Kwon, S.; Lee, J. Model evaluation for forecasting traffic accident severity in rainy seasons using machine learning algorithms: Seoul city study. Appl. Sci. 2020, 10, 129. [Google Scholar] [CrossRef] [Green Version]
- Mestri, R.A.; Rathod, R.R.; Garg, R.D. Identification and removal of accident-prone locations using spatial data mining. In Applications of Geomatics in Civil Engineering; Springer: Berlin/Heidelberg, Germany, 2020; pp. 383–394. [Google Scholar]
- Fan, Z.; Liu, C.; Cai, D.; Yue, S. Research on black spot identification of safety in urban traffic accidents based on machine learning method. Saf. Sci. 2019, 118, 607–616. [Google Scholar] [CrossRef]
- Rovšek, V.; Batista, M.; Bogunović, B. Identifying the key risk factors of traffic accident injury severity on Slovenian roads using a non-parametric classification tree. Transport 2017, 32, 272–281. [Google Scholar] [CrossRef] [Green Version]
- Taamneh, M.; Alkheder, S.; Taamneh, S. Data-mining techniques for traffic accident modeling and prediction in the United Arab Emirates. J. Transp. Saf. Secur. 2017, 9, 146–166. [Google Scholar] [CrossRef]
- Kumar, S.; Toshniwal, D. A data mining approach to characterize road accident locations. J. Mod. Transp. 2016, 24, 62–72. [Google Scholar] [CrossRef] [Green Version]
- Tao, G.; Song, H.; Liu, J.; Zou, J.; Chen, Y. A traffic accident morphology diagnostic model based on a rough set decision tree. Transp. Plan. Technol. 2016, 39, 751–758. [Google Scholar] [CrossRef]
- Zeng, Q.; Huang, H.; Pei, X.; Wong, S.; Gao, M. Rule extraction from an optimized neural network for traffic crash frequency modeling. Accid. Anal. Prev. 2016, 97, 87–95. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Wang, J.; Zheng, Y.; Li, X.; Yu, C.; Kodaka, K.; Li, K. Driving risk assessment using near-crash database through data mining of tree-based model. Accid. Anal. Prev. 2015, 84, 54–64. [Google Scholar] [CrossRef] [PubMed]
- Beshah, T.; Ejigu, D.; Abraham, A.; Snasel, V.; Kromer, P. Pattern recognition and knowledge discovery from road traffic accident data in ethiopia: Implications for improving road safety. In Proceedings of the 2011 World Congress on Information and Communication Technologies, Mumbai, India, 11–14 December 2011; pp. 1241–1246. [Google Scholar]
- Das, A.; Abdel-Aty, M.A. A combined frequency–severity approach for the analysis of rear-end crashes on urban arterials. Saf. Sci. 2011, 49, 1156–1163. [Google Scholar] [CrossRef]
- Chang, L.-Y.; Chen, W.-C. Data mining of tree-based models to analyze freeway accident frequency. J. Saf. Res. 2005, 36, 365–375. [Google Scholar] [CrossRef] [PubMed]
- Sagi, O.; Rokach, L. Ensemble learning: A survey. Wiley Interdiscip. Rev. Data Min. Knowl. Discov. 2018, 8, e1249. [Google Scholar] [CrossRef]
- Hegde, C.; Wallace, S.; Gray, K. Using Trees, Bagging, and Random Forests to Predict Rate of Penetration During Drilling. In Proceedings of the SPE Middle East Intelligent Oil and Gas Conference and Exhibition, Abu Dhabi, United Arab Emirates, 15–16 September 2015; Society of Petroleum Engineers: Denver, CO, USA, 2015. [Google Scholar]
- Lee, T.-H.; Ullah, A.; Wang, R. Bootstrap aggregating and random forest. In Macroeconomic Forecasting in the Era of Big Data; Springer: Berlin/Heidelberg, Germany, 2020; pp. 389–429. [Google Scholar]
- Geurts, P.; Ernst, D.; Wehenkel, L. Extremely randomized trees. Mach. Learn. 2006, 63, 3–42. [Google Scholar] [CrossRef] [Green Version]
- Shahzad, M. Review of road accident analysis using GIS technique. Int. J. Inj. Control. Saf. Promot. 2020, 27, 472–481. [Google Scholar] [CrossRef]
- Kumar, D.; Singh, R.; Kaur, R. GIS Databases: Spatial and Non-spatial. In Spatial Information Technology for Sustainable Development Goals; Springer: Berlin/Heidelberg, Germany, 2019; pp. 15–25. [Google Scholar]
- Budzyński, M.; Kustra, W.; Okraszewska, R.; Jamroz, K.; Pyrchla, J. The Use of GIS Tools for Road Infrastructure Safety Management. In E3S Web of Conferences; EDP Sciences: Ulis, France, 2018; p. 00009. [Google Scholar]
- Le, K.G.; Liu, P.; Lin, L.-T. Determining the road traffic accident hotspots using GIS-based temporal-spatial statistical analytic techniques in Hanoi, Vietnam. Geo-Spat. Inf. Sci. 2020, 23, 153–164. [Google Scholar] [CrossRef] [Green Version]
- Naboureh, A.; Feizizadeh, B.; Naboureh, A.; Bian, J.; Blaschke, T.; Ghorbanzadeh, O.; Moharrami, M. Traffic Accident Spatial Simulation Modeling for Planning of Road Emergency Services. Int. J. Geo-Inf. 2019, 8, 371. [Google Scholar] [CrossRef] [Green Version]
- Briz-Redón, Á.; Mateu, J.; Montes, F. Modeling accident risk at the road level through zero-inflated negative binomial models: A case study of multiple road networks. Spat. Stat. 2021, 43, 100503. [Google Scholar] [CrossRef]
- Prasannakumar, V.; Vijith, H.; Charutha, R.; Geetha, N. Spatio-temporal clustering of road accidents: GIS based analysis and assessment. Procedia-Soc. Behav. Sci. 2011, 21, 317–325. [Google Scholar] [CrossRef] [Green Version]
- Shafabakhsh, G.A.; Famili, A.; Bahadori, M.S. GIS-based spatial analysis of urban traffic accidents: Case study in Mashhad, Iran. J. Traffic Transp. Eng. 2017, 4, 290–299. [Google Scholar] [CrossRef]
- Owusu, C.K.; Eshun, J.K.; Asare, C.K.O.; Aikins, A.A. Identification of Road Traffic Accident Hotspots in the Cape Coast Metropolis, Southern Ghana Using Geographic Information System (GIS). Int. J. Sci. Eng. Res. 2018, 10, 2106–2123. [Google Scholar] [CrossRef]
- Almoshaogeh, M.; Abdulrehman, R.; Haider, H.; Alharbi, F.; Jamal, A.; Alarifi, S.; Shafiquzzaman, M. Traffic Accident Risk Assessment Framework for Qassim, Saudi Arabia: Evaluating the Impact of Speed Cameras. Appl. Sci. 2021, 11, 6682. [Google Scholar] [CrossRef]
- Aghajani, M.A.; Dezfoulian, R.S.; Arjroody, A.R.; Rezaei, M. Applying GIS to Identify the Spatial and Temporal Patterns of Road Accidents Using Spatial Statistics (case study: Ilam Province, Iran). Transp. Res. Procedia 2017, 25, 2126–2138. [Google Scholar] [CrossRef]
- Singh, D.; Mohan, C.K. Deep spatio-temporal representation for detection of road accidents using stacked autoencoder. IEEE Trans. Intell. Transp. Syst. 2018, 20, 879–887. [Google Scholar] [CrossRef]
- Quddus, M. Exploring the relationship between average speed, speed variation, and accident rates using spatial statistical models and GIS. J. Transp. Saf. Secur. 2013, 5, 27–45. [Google Scholar] [CrossRef]
- Sameen, M.I.; Pradhan, B. Assessment of the effects of expressway geometric design features on the frequency of accident crash rates using high-resolution laser scanning data and GIS. Geomat. Nat. Hazards Risk 2017, 8, 733–747. [Google Scholar] [CrossRef] [Green Version]
- Heydari, S.T.; Sarikhani, Y.; Moafian, G.; Aghabeigi, M.R.; Mahmoodi, M.; Ghaffarpasand, F.; Riasati, A.; Peymani, P.; Ahmadi, S.M.; Lankarani, K.B. Time analysis of fatal traffic accidents in Fars Province of Iran. Chin. J. Traumatol. 2013, 16, 84–88. [Google Scholar] [PubMed]
- Sadeghi-Bazargani, H.; Ayubi, E.; Azami-Aghdash, S.; Abedi, L.; Zemestani, A.; Amanati, L.; Moosazadeh, M.; Syedi, N.; Safiri, S. Epidemiological Patterns of Road Traffic Crashes During the Last Two Decades in Iran: A Review of the Literature from 1996 to 2014. Arch. Trauma Res. 2016, 5, e32985. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Afolabi, S.; Warrie, W.; Banjo, O.; Iwashokun, O.; Olawale, A.; Ngqambela, N.; Soliu, F.; Olasunkanmi, O.; Sakinat, F.; Matshika, S. When and where? Proactively predicting traffic accident in South Africa: Our machine learning competition winning approach. Int. J. Soc. Syst. Sci. 2021, 13, 151–170. [Google Scholar] [CrossRef]
- Al-Aamri, A.K.; Hornby, G.; Zhang, L.-C.; Al-Maniri, A.A.; Padmadas, S.S. Mapping road traffic crash hotspots using GIS-based methods: A case study of Muscat Governorate in the Sultanate of Oman. Spat. Stat. 2021, 42, 100458. [Google Scholar] [CrossRef]
- Roland, J.; Way, P.D.; Firat, C.; Doan, T.-N.; Sartipi, M. Modeling and predicting vehicle accident occurrence in Chattanooga, Tennessee. Accid. Anal. Prev. 2021, 149, 105860. [Google Scholar] [CrossRef]
- Liu, J. Large-Scale Traffic Accident Data Classification Method Based on XGBoost. Des. Eng. 2020, 2020, 572–584. [Google Scholar]
- Zahid, M.; Chen, Y.; Jamal, A.; Al-Ofi, K.A.; Al-Ahmadi, H.M. Adopting machine learning and spatial analysis techniques for driver risk assessment: Insights from a case study. Int. J. Environ. Res. Public Health 2020, 17, 5193. [Google Scholar] [CrossRef]
- Zhu, H.; Zhou, Y.; Chen, Y. Identification of potential traffic accident hot spots based on accident data and GIS. In MATEC Web of Conferences; EDP Sciences: Ulis, France, 2020; p. 01005. [Google Scholar]
- Pastor, G.; Tejero, P.; Choliz, M.; Roca, J. Rear-view mirror use, driver alertness and road type: An empirical study using EEG measures. Transp. Res. Part F Traffic Psychol. Behav. 2006, 9, 286–297. [Google Scholar] [CrossRef]
- Thiffault, P.; Bergeron, J. Monotony of road environment and driver fatigue: A simulator study. Accid. Anal. Prev. 2003, 35, 381–391. [Google Scholar] [CrossRef]
- Otmani, S.; Rogé, J.; Muzet, A. Sleepiness in professional drivers: Effect of age and time of day. Accid. Anal. Prev. 2005, 37, 930–937. [Google Scholar] [CrossRef]
- Otmani, S.; Pebayle, T.; Roge, J.; Muzet, A. Effect of driving duration and partial sleep deprivation on subsequent alertness and performance of car drivers. Physiol. Behav. 2005, 84, 715–724. [Google Scholar] [CrossRef]
- Smith, P.; Shah, M.; Lobo, N.d.V. Monitoring head/eye motion for driver alertness with one camera. In Proceedings of the 15th International Conference on Pattern Recognition. ICPR-2000, Barcelona, Spain, 3–7 September 2000; Volume 4, pp. 636–642. [Google Scholar]
- Richardson, J.H. The development of a driver alertness monitoring system. In Fatigue and Driving; Routledge: London, UK, 2019; pp. 219–229. [Google Scholar]
- Murthy, K.; Khan, Z.A. Different techniques to quantify the driver alertness. World Appl. Sci. J. 2013, 22, 1094–1098. [Google Scholar]
- Moafian, G.; Aghabeigi, M.R.; Hoseinzadeh, A.; Lankarani, K.B.; Sarikhani, Y.; Heydari, S.T. An epidemiologic survey of road traffic accidents in Iran: Analysis of driver-related factors. Chin. J. Traumatol. 2013, 16, 140–144. [Google Scholar] [PubMed]
- Jung, S.; Joo, S.; Oh, C. Evaluating the effects of supplemental rest areas on freeway crashes caused by drowsy driving. Accid. Anal. Prev. 2017, 99, 356–363. [Google Scholar] [CrossRef]
- Hu, D.; Feng, X.; Zhao, X.; Li, H.; Ma, J.; Fu, Q. Impact of HMI on driver’s distraction on a freeway under heavy foggy condition based on visual characteristics. J. Transp. Saf. Secur. 2020, 1–24. [Google Scholar] [CrossRef]
- Jiang, X.; Abdel-Aty, M.; Hu, J.; Lee, J. Investigating macro-level hotzone identification and variable importance using big data: A random forest models approach. Neurocomputing 2016, 181, 53–63. [Google Scholar] [CrossRef]
- SCI Population and Housing Censuses 2016. Available online: https://www.amar.org.ir/english/Population-and-Housing-Censuses (accessed on 17 August 2018).
- Ehsani Sohi, M.; Dashtestaninejad, H.; Khademi, E. Effects of Roadway and Traffic Characteristics on Accidents Frequency at City Entrance Zone. Int. J. Transp. Eng. 2019, 7, 139–152. [Google Scholar]
- PBO Highway Geometric Design Code (No.415) of Iran. Available online: https://sama.mporg.ir/sites/Publish/en/Pages/ZabetehAllItems.aspx (accessed on 19 July 2021).
- Gartenberg, D. The Circadian Rhythm and How to Hack Yours. Available online: https://medium.com/@dangartenberg/the-circadian-rhythm-and-how-to-hack-yours-bd8413e0aacf (accessed on 12 May 2018).
- D’Anna, C.; Bibbo, D.; Bertollo, M.; di Fronso, S.; Comani, S.; De Blasiis, M.R.; Veraldi, V.; Goffredo, M.; Conforto, S. State of alertness during simulated driving tasks. In Proceedings of the XIV Mediterranean Conference on Medical and Biological Engineering and Computing, Paphos, Cyprus, 31 March–2 April 2016; Springer: Berlin/Heidelberg, Germany, 2016; pp. 913–918. [Google Scholar]
- Singh, D.; Singh, B. Investigating the impact of data normalization on classification performance. Appl. Soft Comput. 2020, 97, 105524. [Google Scholar] [CrossRef]
- Bühlmann, P.; Yu, B. Analyzing bagging. Ann. Stat. 2002, 30, 927–961. [Google Scholar] [CrossRef]
- Dietterich, T.G. Ensemble methods in machine learning. In Multiple Classifier Systems, Proceedings of the International Workshop on Multiple Classifier Systems, Cagliari, Italy, 21–23 June 2000; Springer: Berlin/Heidelberg, Germany, 2000; pp. 1–15. [Google Scholar]
- Razavi-Termeh, S.V.; Sadeghi-Niaraki, A.; Choi, S.-M. Spatial modeling of asthma-prone areas using remote sensing and ensemble machine learning algorithms. Remote. Sens. 2021, 13, 3222. [Google Scholar] [CrossRef]
- Teli, S.; Kanikar, P. A survey on decision tree based approaches in data mining. Int. J. Adv. Res. Comput. Sci. Softw. Eng. 2015, 5, 613–617. [Google Scholar]
- Sharma, H.; Kumar, S. A survey on decision tree algorithms of classification in data mining. Int. J. Sci. Res. 2016, 5, 2094–2097. [Google Scholar]
- Razavi-Termeh, S.V.; Sadeghi-Niaraki, A.; Choi, S.-M. Effects of air pollution in spatio-temporal modeling of asthma-prone areas using a machine learning model. Environ. Res. 2021, 200, 111344. [Google Scholar] [CrossRef] [PubMed]
- Razavi-Termeh, S.V.; Sadeghi-Niaraki, A.; Choi, S.-M. Asthma-prone areas modeling using a machine learning model. Sci. Rep. 2021, 11, 1–16. [Google Scholar] [CrossRef] [PubMed]
- Anguita, D.; Ghelardoni, L.; Ghio, A.; Oneto, L.; Ridella, S. The ‘K’in K-fold cross validation. In Proceedings of the 20th European Symposium on Artificial Neural Networks, Computational Intelligence and Machine Learning (ESANN), Bruges, Belgium, 25–27 April 2012; pp. 441–446. [Google Scholar]
- Fushiki, T. Estimation of prediction error by using K-fold cross-validation. Stat. Comput. 2011, 21, 137–146. [Google Scholar] [CrossRef]
- Razavi-Termeh, S.V.; Khosravi, K.; Sadeghi-Niaraki, A.; Choi, S.-M.; Singh, V.P. Improving groundwater potential mapping using metaheuristic approaches. Hydrol. Sci. J. 2020, 65, 2729–2749. [Google Scholar] [CrossRef]
- Xu-hui, W.; Ping, S.; Li, C.; Ye, W. A ROC curve method for performance evaluation of support vector machine with optimization strategy. In Proceedings of the 2009 International Forum on Computer Science-Technology and Applications, Chongqing, China, 25–27 December 2009; IEEE: Piscataway, NJ, USA, 2009; pp. 117–120. [Google Scholar]
- Ranjgar, B.; Razavi-Termeh, S.V.; Foroughnia, F.; Sadeghi-Niaraki, A.; Perissin, D. Land subsidence susceptibility mapping using persistent scatterer sar interferometry technique and optimized hybrid machine learning algorithms. Remote. Sens. 2021, 13, 1326. [Google Scholar] [CrossRef]
- Shogrkhodaei, S.Z.; Razavi-Termeh, S.V.; Fathnia, A. Spatio-temporal modeling of pm2. 5 risk mapping using three machine learning algorithms. Environ. Pollut. 2021, 289, 117859. [Google Scholar] [CrossRef] [PubMed]
- Bergstra, J.; Bengio, Y. Random search for hyper-parameter optimization. J. Mach. Learn. Res. 2012, 13, 281–305. [Google Scholar]
- Menze, B.H.; Kelm, B.M.; Masuch, R.; Himmelreich, U.; Bachert, P.; Petrich, W.; Hamprecht, F.A. A comparison of random forest and its Gini importance with standard chemometric methods for the feature selection and classification of spectral data. BMC Bioinform. 2009, 10, 1–16. [Google Scholar] [CrossRef] [Green Version]
- Altman, N.; Krzywinski, M. Points of Significance: Ensemble Methods: Bagging and Random Forests; Nature Publishing Group: Berlin, Germany, 2017. [Google Scholar]
- Brownlee, J. How to Develop an Extra Trees Ensemble with Python. Available online: https://machinelearningmastery.com/extra-trees-ensemble-with-python/ (accessed on 12 September 2021).
- Schlögl, M. A multivariate analysis of environmental effects on road accident occurrence using a balanced bagging approach. Accid. Anal. Prev. 2020, 136, 105398. [Google Scholar] [CrossRef]
- Noce, F.; Tufik, S.; Mello, M.T.D. Professional drivers and working time: Journey span, rest, and accidents. Sleep Sci. 2008, 1, 20–26. [Google Scholar]
- Anund, A.; Ahlström, C.; Fors, C.; Åkerstedt, T. Are professional drivers less sleepy than non-professional drivers? Scand. J. Work. Environ. Health 2018, 44, 88–95. [Google Scholar] [CrossRef]
- Wang, J.; Sun, S.; Fang, S.; Fu, T.; Stipancic, J. Predicting drowsy driving in real-time situations: Using an advanced driving simulator, accelerated failure time model, and virtual location-based services. Accid. Anal. Prev. 2017, 99, 321–329. [Google Scholar] [CrossRef]
- Xie, Z.; Yan, J. Detecting traffic accident clusters with network kernel density estimation and local spatial statistics: An integrated approach. J. Transp. Geogr. 2013, 31, 64–71. [Google Scholar] [CrossRef]
- Le, K.G.; Liu, P.; Lin, L.-T. Traffic accident hotspot identification by integrating kernel density estimation and spatial autocorrelation analysis: A case study. Int. J. Crashworthiness 2020, 1–11. [Google Scholar] [CrossRef]
- Foster, R.G.; Kreitzman, L. The rhythms of life: What your body clock means to you! Exp. Physiol. 2014, 99, 599–606. [Google Scholar] [CrossRef]
- Ahlström, C.; Anund, A.; Fors, C.; Åkerstedt, T. Effects of the road environment on the development of driver sleepiness in young male drivers. Accid. Anal. Prev. 2018, 112, 127–134. [Google Scholar] [CrossRef] [PubMed]












| Paper | Machine Learning Application |
|---|---|
| Farhangi et al. [10] | Accident-risk modeling and mapping |
| Lee et al. [25] | Accident severity prediction |
| Mestri et al. [26] | Identification of accident-prone locations |
| Al-dogom et al. [21] | Spatio-temporal analysis for accidents prediction |
| Fan et al. [27] | Identification of accident black spots and analyzing their characteristics |
| Rovšek et al. [28] | Identifying the critical risk factors of accident injury severity |
| Taamneh et al. [29] | Accident modeling and prediction |
| Kumar and Toshniwal [30] | Characterizing road accident locations |
| Tao et al. [31] | Creating a diagnostic model between driving violation behaviors and accident morphologies |
| Zheng et al. [32] | Accident frequency modeling |
| Wang et al. [33] | Driving risk assessment using near-crash database |
| Beshah et al. [34] | Pattern recognition and knowledge discovery from accident data |
| Das and Abdel-Aty [35] | Combined frequency-severity accident analysis |
| Chang and Chen [36] | Establishing the empirical relationships between accidents and road geometric |
| Paper | Aim | Summary | Study Area | Hyper Parameters Tuning |
|---|---|---|---|---|
| Afolabi et al. [57] | Proactively predicting traffic accident | Ensemble machine learning algorithms of lightGBM, catboost, and lightGBM + catboost were used to predict the occurrence of accidents accurately at a given segment for every hour ranging. Data processing and visualization were performed with GIS. | Cape Town, South Africa | No |
| Al-Aamri et al. [58] | Mapping road traffic crash hotspots | The network-based analysis and KDE identified traffic crash hotspots in GIS. Random forest was used to classify the crash hot and cold zones and evaluate the role of effective factors. | Muscat Governorate, Oman | No |
| Roland et al. [59] | Modeling and predicting the vehicle accident occurrence | The multi-layer perceptron model used different spatial attributes to inform local law enforcement officers of high likelihood accident hotspots for any given day. Manipulating spatial information into desired formats was performed with GIS. | Chattanooga City, Tennessee | No |
| Farhangi et al. [10] | Drowsy accidents risk modeling and mapping | Drowsy accidents occurrence risk was modeled with RF, SVM, and decision tree. The preparation and preprocessing of spatial factors and accident-risk mapping were performed in GIS. | Qazvin Province, Iran | No |
| Liu [60] | Classification of the accident severity using large-scale data | Traffic accident severity was classified with SGD linear, K-nearest neighbors, decision tree, RF, and XGBoost algorithms based on various influential factors in large-scale data. Data processing was performed with GIS. | California State, United States | No |
| Zahid et al. [61] | Adopting machine learning and spatial analysis for driver risk assessment | Driving violation hotspots along two expressways developed in GIS and K-nearest neighbors, SVM, and CN2 rule inducer algorithms assessed risk based on the characteristics of hotspots well. | Luzhou City, China | No |
| Zhu et al. [62] | Identification of potential traffic accident hotspots on accident data | First, spatial analysis in GIS was used to identify traffic accident hotspots. Then, logistic regression and RF algorithms identified influencing factors on the creation of the hot spots. | Beijing city, China | No |
| Method | Hyper Parameters | |
|---|---|---|
| BDT | Number of base estimators: 74 | Max_features: 1 |
| Max_samples: 0.4694 | Bootstrap: True | |
| ET | Number of base estimators: 96 | Max_features: 0.3535 |
| Min_samples_split: 2 | Max_depth: 41 | |
| Min_samples_leaf: 1 | Bootstrap: False | |
| Max_samples: 1 | ||
| RF | Number of base estimators: 100 | Max_features: 0.3535 |
| Min_samples_split: 3 | Max_depth: 61 | |
| Min_samples_leaf: 1 | Bootstrap: True | |
| Max_samples: 0.7959 | ||
| Model | Fold Number | AUC | Standard Error | 95% Confidence Interval | Mean AUC | SD |
|---|---|---|---|---|---|---|
| BDT | 1 | 0.844 | 0.00906 | 0.826 to 0.861 | 0.846 | 0.002 |
| 2 | 0.844 | 0.00917 | 0.826 to 0.860 | |||
| 3 | 0.845 | 0.00904 | 0.828 to 0.862 | |||
| 4 | 0.850 | 0.00886 | 0.832 to 0.866 | |||
| 5 | 0.846 | 0.00906 | 0.828 to 0.862 | |||
| ET | 1 | 0.833 | 0.00937 | 0.815 to 0.850 | 0.840 | 0.005 |
| 2 | 0.838 | 0.00937 | 0.820 to 0.855 | |||
| 3 | 0.839 | 0.00918 | 0.821 to 0.856 | |||
| 4 | 0.846 | 0.00903 | 0.828 to 0.862 | |||
| 5 | 0.844 | 0.00913 | 0.826 to 0.860 | |||
| RF | 1 | 0.842 | 0.00912 | 0.824 to 0.859 | 0.847 | 0.003 |
| 2 | 0.847 | 0.00912 | 0.829 to 0.863 | |||
| 3 | 0.845 | 0.00907 | 0.827 to 0.861 | |||
| 4 | 0.851 | 0.00886 | 0.834 to 0.868 | |||
| 5 | 0.848 | 0.00899 | 0.830 to 0.864 |
| Model | Fold Number | AUC | Standard Error | 95% Confidence Interval | Mean AUC | SD |
|---|---|---|---|---|---|---|
| BDT | 1 | 0.825 | 0.00965 | 0.806 to 0.842 | 0.827 | 0.002 |
| 2 | 0.819 | 0.00970 | 0.800 to 0.836 | |||
| 3 | 0.841 | 0.00916 | 0.823 to 0.857 | |||
| 4 | 0.827 | 0.00978 | 0.809 to 0.845 | |||
| 5 | 0.832 | 0.00958 | 0.813 to 0.849 | |||
| ET | 1 | 0.842 | 0.00928 | 0.825 to 0.859 | 0.828 | 0.006 |
| 2 | 0.830 | 0.00954 | 0.812 to 0.847 | |||
| 3 | 0.825 | 0.00961 | 0.807 to 0.843 | |||
| 4 | 0.846 | 0.00902 | 0.828 to 0.862 | |||
| 5 | 0.828 | 0.00957 | 0.810 to 0.846 | |||
| RF | 1 | 0.830 | 0.00941 | 0.812 to 0.848 | 0.845 | 0.004 |
| 2 | 0.851 | 0.00884 | 0.833 to 0.867 | |||
| 3 | 0.826 | 0.00967 | 0.807 to 0.843 | |||
| 4 | 0.833 | 0.00943 | 0.815 to 0.850 | |||
| 5 | 0.846 | 0.00903 | 0.828 to 0.863 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Farhangi, F.; Sadeghi-Niaraki, A.; Razavi-Termeh, S.V.; Choi, S.-M. Evaluation of Tree-Based Machine Learning Algorithms for Accident Risk Mapping Caused by Driver Lack of Alertness at a National Scale. Sustainability 2021, 13, 10239. https://doi.org/10.3390/su131810239
Farhangi F, Sadeghi-Niaraki A, Razavi-Termeh SV, Choi S-M. Evaluation of Tree-Based Machine Learning Algorithms for Accident Risk Mapping Caused by Driver Lack of Alertness at a National Scale. Sustainability. 2021; 13(18):10239. https://doi.org/10.3390/su131810239
Chicago/Turabian StyleFarhangi, Farbod, Abolghasem Sadeghi-Niaraki, Seyed Vahid Razavi-Termeh, and Soo-Mi Choi. 2021. "Evaluation of Tree-Based Machine Learning Algorithms for Accident Risk Mapping Caused by Driver Lack of Alertness at a National Scale" Sustainability 13, no. 18: 10239. https://doi.org/10.3390/su131810239