1. Introduction
As the concern over global warming and energy issues grows, electric vehicles are increasingly considered as an alternative to traditional vehicles and have hence gained much attention from the general public. With the increasing interest and popularity of electric vehicles (EVs), many countries have developed electric buses and introduced them on a trial basis. In South Korea, the Seoul metropolitan government has operated electric buses around significant tourist destinations and has been gradually expanding the network [
1]. Jeju island, the largest island in Korea, is preparing for pilot electric bus operation [
2]. In addition to these attempts, academic research into the usefulness and operation policies of electric vehicles is actively underway [
3]. Outside Korea, China has grown its market size of electric buses significantly [
4], and we can infer that the demand for e-Buses is increasing continuously. Other major countries, such as the U.S, European countries, and India, have trends of increasing demand and application of electric buses, and these trends are expected to continue in the future [
5].
There are several types of electric buses, as well as operation methods. The most typical ones are the plug-in type, the wireless rechargeable type, the trolley bus and the battery exchange type. Since each method has its special characteristics, it cannot be easily concluded which is the best. However, depending on the type of electric bus, the factors and problems requiring consideration vary widely. For example, the trolley bus needs wires for electric supply. Thus the constraint of wires becomes an important consideration, and there are many studies treating issues related to wire networks. Teoh et al. [
6] cover routing network design and fleet planning for Malaysia’s transportation situation. On the other hand, for the battery charging system, efficient route configuration within a given battery capacity is important since charging takes time and is usually only possible in depots. Thus, regarding charging system problems, locating a depot or optimizing time scheduling given a network configuration are major concerns. In fact, some studies have focused on electric bus operations and the problem of locating charging stations. Relatively recently, Rogge et al. [
7] aimed to optimize the charging schedule of electric buses to minimize overall costs, including vehicle investment, charger investment, operational costs, and energy expenses. Liu and Wang [
8] treated the problem of locating several types of recharging facilities, especially wireless recharging facilities. There is also ongoing research into operating electric buses based on battery swapping. In battery swapping cases, each vehicle travels with a battery and can swap the battery at the designated places for exchange, so-called battery swapping stations. The advantage of the battery swapping system is that it does not require huge infrastructure as a trolleybus system does, and unlike the battery charging system, it is possible to replace the battery quickly along the route. In the battery swapping system, locating battery swapping stations is a crucial problem. Ko and Shim [
9] deal with the issue of selecting the location of battery exchange stations for the seamless operation of electric taxis, which operate with no fixed routes. Furthermore, several studies deal with the issues related to the scheduling of battery swapping when operating electric vehicles or buses. For example, Chao and Xiaohong [
10] and Kang et al. [
11] dealt with the time scheduling problem of battery swapping systems. Sarker et al. [
12] proposed a numerical model for selecting the location of battery swapping stations in terms of the supply of and demand for electricity, and the scheduling of electrical supply. Our paper differs from those studies in that we aim to determine both the location of swapping stations and the scheduling of battery swapping. We approach battery swapping systems as being underlying problem situations. In doing so, we deal with the problem of operating an electric bus in a public transit network with a battery swapping system. To achieve this, we assume the installation of a so-called Quick Charger Machine (QCM) over the public bus transit network (see
Figure 1). We refer those who are interested in the QCM, to the web page of reference [
13].
As
Figure 1 shows, QCM is a machine installed in a proper bus station and it transforms an eligible bus station into a battery swapping station. Since the automated machine replaces the battery, it is possible to replace the battery within a short time (say, within one minute) while passengers are transferring. Inevitably, for the seamless operation of electric buses (e-Buses) in public transportation, some existing bus stations should play the role of battery swapping stations due to the limited travel range of e-Buses. Considering that the number of QCMs is related to the operational cost of the system, it is important to minimize the total number of QCMs installed. In this problem, we do not explicitly consider the installation costs of these QCMs, which may differ by location.
This problem can be partly viewed as a location routing problem (LRP) variant.The LRP considers vehicle routing and related resources (e.g., facilities, customers and so on) to find proper facility locations, determine the optimal number of facilities or vehicles, and optimize the routing plan [
14]. The LRP itself has many variants depending on the particular purpose or problem situation [
15,
16]. In this paper, the problem is to find the number of facilities and their optimal locations. In the general LRP, some nodes have demands, and vehicles route them to satisfy those demands. In this problem, we can see the similarity with the LRP in the sense that the facilities considered are bus stations with a QCM and the vehicles travel over the bus transit network while preventing battery shortage by visiting some of the QCMs. There are many papers in literature (e.g., [
17,
18,
19]) introducing the basic concept of the LRP, its variants and solution approaches. Amaya et al. [
20] study the operation of vehicles and the location of depots with capacitated vehicles, a problem defined as the capacitated arc routing problem (CARP). The specific problem of that paper is that the service vehicle (SV) travels service arcs in a graph, and since the SV has a finite capacity, to enable its continuous service, it is replenished by a refilling vehicle (RV). There is a depot to refill the RV, and the paper tries to find the optimal location of the depot and optimal min-cost path. If we assume the refilling vehicles are fixed and uncapacitated, this problem situation becomes similar to our assumed problem situation. Nevertheless, our paper is completely different in that it considers the cost incurred in routing. Xing et al. [
21] consider several depots in the CARP model. Bektaş and Elmastaş [
22] deal with a similar problem to ours, and find the optimal locations for the depots, but consider just one main depot in the bus route for fulfilling buses without any other refill point. Yang and Sun [
23] assume the problem of delivering goods to customers from a depot using electric vehicles. The depot serves as both a supply of goods and a battery swapping station. Within this setting, they select depot locations that minimize overall shipping costs. Rogge et al. [
7] propose optimal charging priority and charging location in the battery swapping problem, and examine a similar situation to ours. However, this paper is different to ours in that it deals with a centralized charging system, which means that battery charging occurs only at the depot. Boccia et al. [
24] deal with an interesting problem similar to ours in some respects. They determine the location of the facility on the flow network that maximizes the flow through the facilities. To summarize the above, our study significantly differs from previous studies. In our problem, each node (i.e., a bus station with QCM) can serve as a refill point while most of the previous works set a separate depot as the central refill point.
This paper is organized as follows.
Section 2 presents the three different proposed mathematical programming models for the concomitant model. In
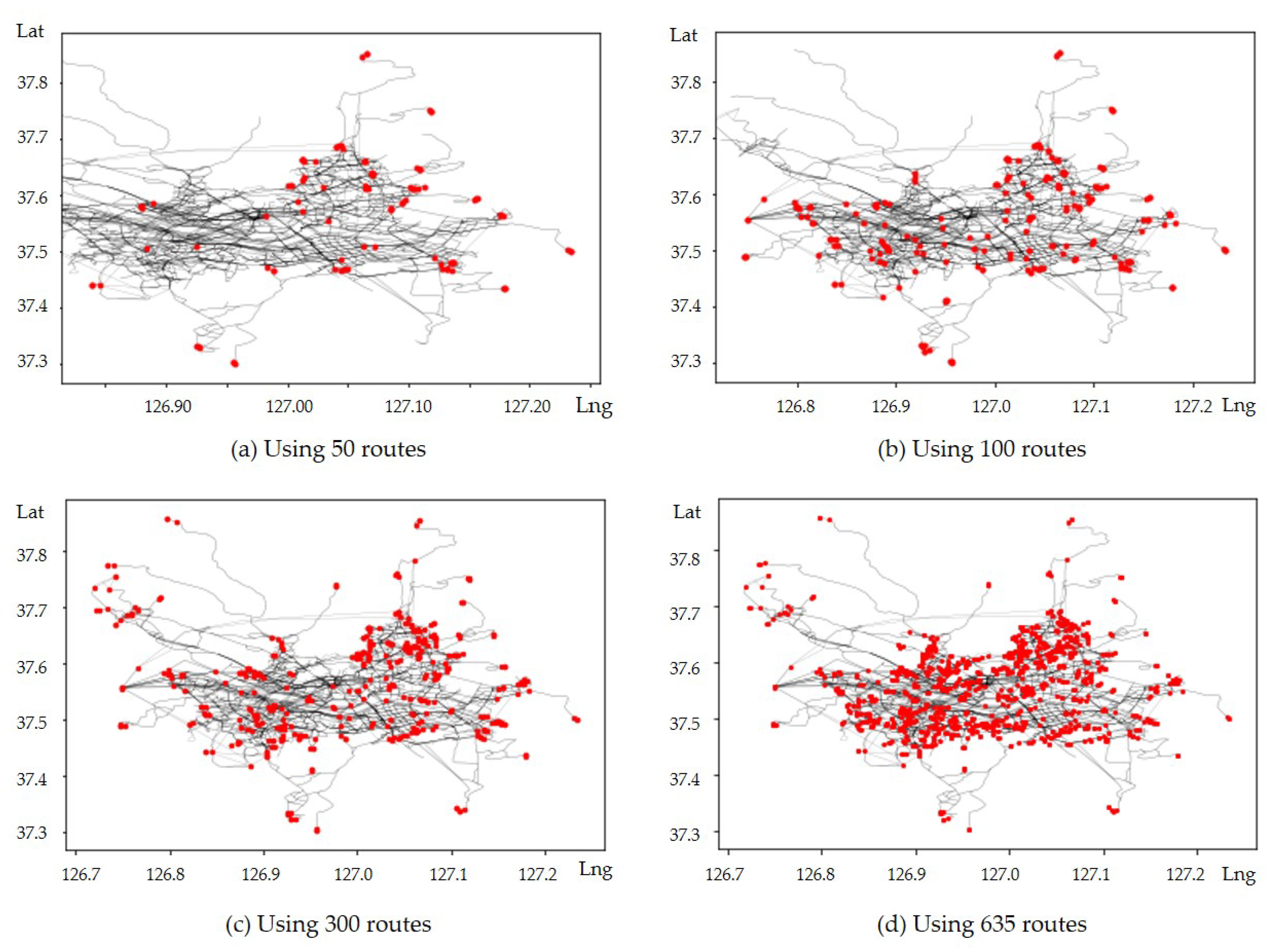
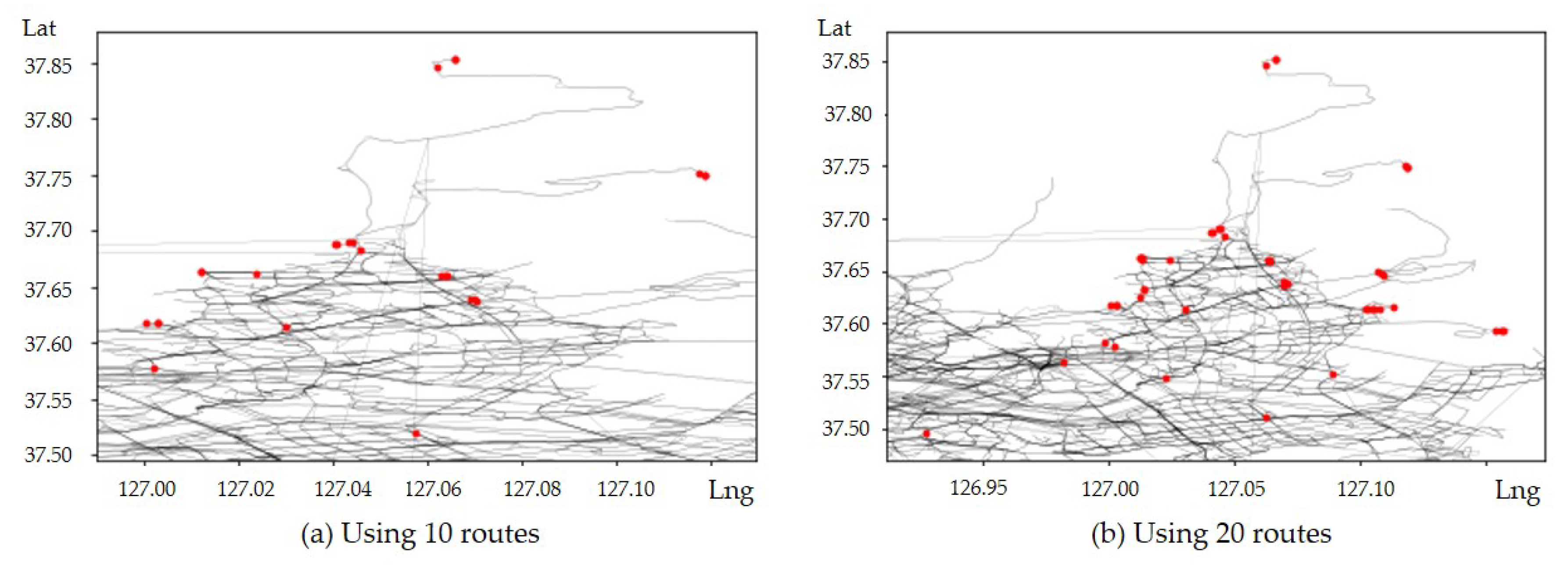
Section 3, the proposed models are applied and tested on the current bus transit network in the Seoul metropolitan area of South Korea and the experimental results are discussed, including comparisons of the models. Finally, we provide a conclusion in
Section 4.
2. Model
In this section, we present the mathematical programming models for swapping station deployments for an e-Bus transit network. The deployment of a network of swapping stations is essential given e-Buses’ limited travel range. This paper considers the problem of locating battery swapping stations for electric buses on a bus transit network while appropriately addressing the battery capacity of each bus in operation. Given the situation, the objective of our problem is to optimize network performance. Specifically, we maximize the flow covered by a predetermined number of stations or minimize the number of stations needed to cover traffic flows. For this, three different mixed-integer programming models are proposed to address the concomitant problem. These are the set-covering-based model (
Section 2.3.1), the flow-based model (
Section 2.3.2), and the path-based model (
Section 2.3.3).
2.1. Assumption
Before presenting the mathematical models, we first present the assumptions while maintaining the essence of the problem. We note that all these assumptions are applied to the three models. First, battery swapping can be achieved within the time period the passengers are transferring so that the problem of interest is free from battery swapping time constraints. Second, if a bus route from a depot to the end does not require battery swapping during a journey, we exclude this route from consideration. Third, we also assume that a battery in the swapping station is always a fully charged battery; in other words, there are no replacements with an incompletely charged battery. Lastly, considering QCM assumptions, we ignore the possibility that there exist some stations where battery swapping facilities cannot be installed due to geographical and spatial problems or administrative problems.
2.2. Notation
The sets, parameters, and decision variables used in the models are listed in
Table 1:
We remark that the eligibility of each bus stop for a QCM () can be confirmed during the preprocessing process by considering factors such as electrical grid infrastructure and the availability of the construction space required for a QCM.
2.3. Mathematical Programming Formulations
In this section, we present the mathematical programming formulations for the problem of interest—i.e., set-covering formulation, flow-based formulation and path-based formulation—and then discuss the pros and cons of each formulation.In fact, we propose three types of formulations for the same strategic decision making problem of locating QCMs in a bus transit network. We will see that the set-covering formulation is efficient in terms of computational performance but that it lacks flexibility when incorporating additional issues such as Quality of Service. To address this drawback, flow-based and path-based formulations are also proposed since their models can incorporate these additional issues, as we will discuss in the subsequent sections.
2.3.1. Set-Covering Formulation
First, with the maximal ordered subset (MOS) defined in
Table 1, this problem can be basically viewed as a set-covering problem.
Figure 2 illustrates the definition of MOS and the basic idea of the set-covering formulation. If at least one QCM is included in all the MOSs for each bus route, we can confirm that no full battery discharge occurs during the bus’s traversal of that route, since MOS is defined as the maximal distance that an e-Bus can drive without needing a battery swap. By incorporating the definition of MOSs, the following formulation can be proposed to minimize the overall number of QCMs.
Model (Set-covering model) The objective function in Equation (
1a) is to minimize the total number of QCM installations over the e-Bus transit network. We note that, as for conventional facility location models, this objective function can be easily modified to minimize QCM installations and annual maintenance costs. However, in this paper we limit our attention to minimizing the total number of QCM installations. Constraint () indicates that each MOS must contain at least one QCM, as discussed above. Constraint () guarantees that all the depots have QCM functionality.
We assume that
is large enough to warrant that
for all
,
; otherwise, the problem becomes infeasible. This formulation has a compact form, compared with the other formulations below. However, the set-covering model only suggests the locations of QCMs among potential bus station candidates for QCM installation with
y variables. We will see that the other proposed formulations simultaneously determine not only the QCM locations but also the battery swapping schedule of each bus en route. Thus, with this formulation, it is difficult to take Quality of Service (QoS) into account because of the difficulty of analyzing the operational efficiency of each bus and route due to limited information on where and how many times battery swapping occurs. We discuss this aspect further in
Section 3.5. The formulations introduced below complement these perspectives and should be more informative.
2.3.2. Flow-Based Formulation
As noted earlier, the set-covering formulation in
Section 2.3.1 does not explicitly provide detailed locations of where to swap batteries for each bus (i.e., battery swapping scheduling for each bus en route). Thus, we here suggest an alternative model which overcomes the limitation of the first model. This model is based on the idea of minimizing the number of QCM installations while satisfying all the in- and out-flows and the connectivity of all stations. For this, we first introduce the additional notations in
Table 2 and then introduce the flow-based model.
Constraints (2b) and (2c) indicate that a QCM can only be installed when the variable x is selected, which means that a bus in route r will use and stations for swapping batteries. Constraint (2d) is the connectivity constraint with the conditional parameter . Constraint (2e) indicates that all the depots should also play the role of QCM, and Constraints (2f) and (2g) say that and are binary variables. The advantage of this model is that we can determine not only the QCM locations but also the detailed battery swapping schedules for each bus. Moreover, this model gives a potential chance for insight into aspects of Quality of Service (QoS) since x variables suggest the detailed routing schedule information for each bus so we can analyze the efficiency of each bus route. On the other hand, a drawback of this model is that if a bus route has more QCMs than its minimally required number, a bus on the route does not necessarily follow the suggested battery swapping schedules (i.e., alternative plans exist, and this model cannot capture that aspect). Moreover, compared with the set-covering formulation, the complexity of this formulation is significantly increased in terms of the number of decision variables and constraints because, with n stations, the total number of x variables is as much as , in the worst case. In addition, as we can see in the structure of the formulation, the number of constraints also increases in proportion to the number of variables. This implies that, depending on the number of entire stations of our problem or stations over the certain bus transit network, the computational complexity of the model dramatically increases. Thus, it may be necessary to come up with more efficient modeling or solution approaches. In this regard, we propose another formulation utilizing a column generation algorithm suitable for solving a large-scale problem, as presented in the next section.
2.3.3. Path-Based Formulation
We now present a path-based formulation for this problem. The main difference between the flow-based model and the path-based model is that the decision variable
x in the flow-based model indicates the previous and next stations for the battery swap. On the other hand, the path-based model groups these
x variables based on each route and defines the set of paths throughout a bus itinerary, where each path corresponds to a feasible battery swapping schedules. In summary, a path is nothing but one of a subset of QCM stations for battery swapping on each route.
Table 3 shows additional notations for the path-based formulation.
The path-based model can be formulated as follows:
The
x variables of the flow-based model are translated into a path, which becomes much simpler than before. Constraint (3b) means only one path should be chosen from among the possible paths for each route, and Constraint (3c) indicates that if a path is selected, then the nodes included in that path must be QCM stations. Finally, all the decision variables are binary variables, as indicated by Constraint (3d). The problem is that, although this formulation looks simple, creating a path set for each route and considering all these paths are not straightforward at all. With
n nodes in a bus route, the total number of possible paths can reach up to
. Thus, we approach this problem based on column generation techniques. Note that a column generation algorithm is useful when dealing with problems featuring large numbers of variables because it avoids the enumeration of all possible variables and instead only evaluates them as needed. We note that column generation algorithms cannot be applied to all cases, but that they are applicable to this problem in two respects. First, LP-relaxation is essential for application of the column generation algorithm, and because this problem treats a kind of network-flow problem, we can use LP-relaxation [
25]. Moreover, as described above, this problem has a large number of variables compared to the number of constraints. According to the column generation algorithm, we divide this model into a master problem
and sub-problems
for each route
. We then iteratively solve the problem by repeatedly adding the feasible paths from each sub-problem to the master problem using the column generation algorithm.
Model (Master problem of path-based model) The master problem
is basically the same as the path-based formulation (
Section 2.3.3), but starts with a partial set of paths as an initial basis. Let
and
be the dual variables for Equations () and (), respectively. To solve the problem with these dual variables, the linear programming relaxation of the master problem is solved. If the reduced cost for
x variable,
, turns out to be negative, then the corresponding column
can be added to the restricted master problem. To find a candidate
x-variable to add, we need to solve the following pricing sub-problem
for a route
r:
Model (Subproblem of path-based model for route r) In the sub-problem , if , if , and 0 otherwise. Note that the path generation sub-problem is a variant of the shortest path problem. Unlike a typical shortest path problem, minimizes node costs instead of edge costs. It is trying to minimize the sum of the costs incurred at the nodes visited. The problem can be easily transformed to an edge-cost-minimizing shortest path problem. Since the arc weights in the transformed model are non-negative (the dual variables for Equation (4c), , are negative), the sub-problem can be solved efficiently by Dijkstra’s algorithm.
The objective Function (5a) indicates the reduced cost of the master problem, and thus if the objective function of is non-negative, it means that we have found a candidate x-variable with a negative reduced cost. Constraints (5b) and (5c) show the activating condition of y, since the master problem is a minimization problem so that a variable with negative reduced costs could further decrease the objective function of . When the sub-problem cannot find any solution with a negative objective function value, we can conclude that all the necessary variables have been added to the restricted master problem. The algorithm is then terminated after deriving the optimal solution of the master problem.
4. Conclusions and Future Research
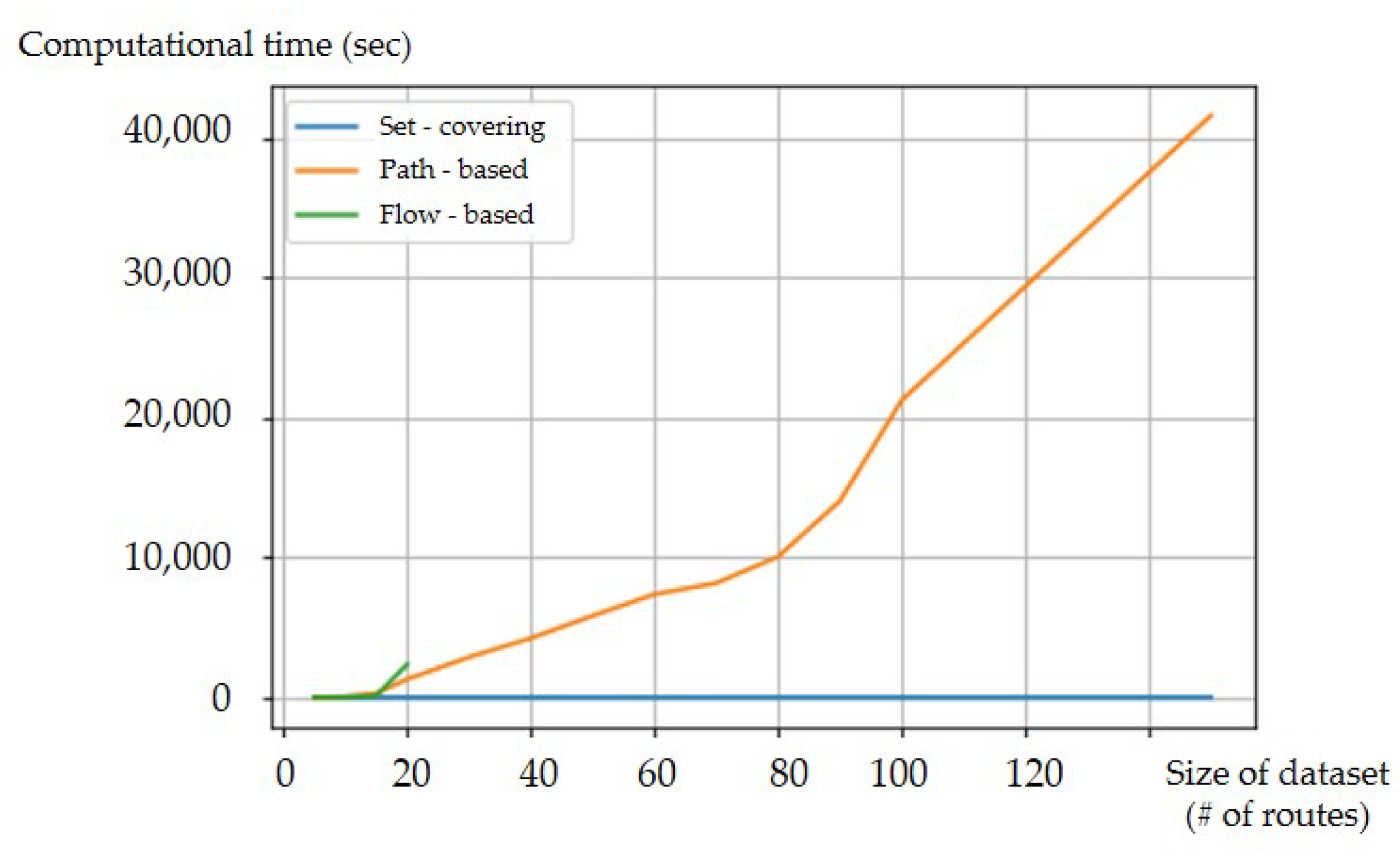
In this paper, we studied the effective operation of electric buses, assuming the battery swapping system, in which batteries can be swapped in bus stations by using special equipment called quick charger machines. The purpose of this study is to minimize the total number of QCM installations in existing bus stations over the urban bus transit network while providing the seamless operation of a public bus service in a metropolitan area. To address this problem, we suggest three different mathematical models based on mixed-integer programming. The first model, the set-covering-based formulation, has fast computational times since it is formulated as a low complexity model. The deficiency of this model is that it does not suggest a detailed schedule of where to swap batteries for each bus; it only provides the locations of the QCM stations. On the other hand, the flow-based formulation and path-based formulation do provide this important additional information, unlike the set-covering model. However, these models are highly computationally complex, as shown by the experiment results with actual data. The column generation algorithm used in the path-based model makes this model better balanced in terms of computational time and completeness of information than the set-covering model or flow-based model. In
Section 3, we check the performance of each model and their validity for this problem with the actual bus transit network data from the Seoul metropolitan area. Above all, in
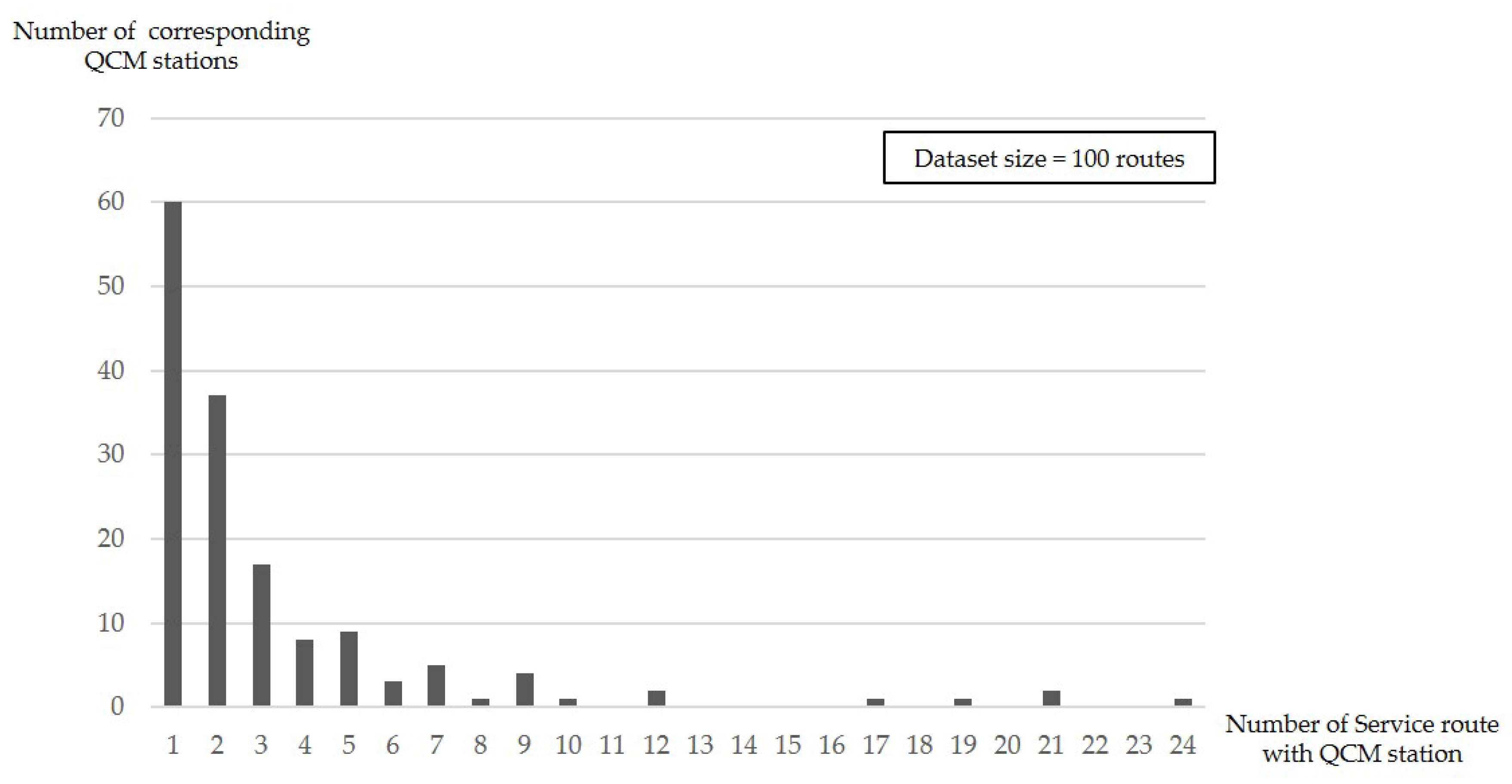
Section 3.5, as a QoS analysis, we introduce additional constraints to the path-based model so that the demand for battery servicing at QCM stations is distributed more evenly over the entire bus transit network and demonstrate that the approach is effective. Most of all, we show the improved flexibility and scalability of the flow-based and path-based models compared to the set-covering model. This paper contributes significantly to the understanding of how to introduce an electric vehicle to an urban area. The varied models can solve this problem and give insight into further studies.
For future work, we can generalize the assumptions used in our problem. First, we assume that all buses depart from the depot at full battery capacity. However, if each bus rotates its route several times, then the initial or final condition of the battery can be different every time. By taking this into account, the improved model can reflect the initial battery level. Moreover, considering the cost of installing each QCM on an individual basis can be meaningful since here we assume the cost of installation is the same for all stations, and, therefore, only focus on minimizing the total number of QCMs. For another problem approach, we can first solve the set-covering model and then solve another scheduling model. The set-covering model only suggests the optimal location of QCM stations but not the specific scheduling, and the result of the flow-based model and path-based model are also restricted by their computational complexity. Thus, proposing additional scheduling problems that utilize the QCM location results of the set-covering model could be another methodological approach, although one that would not guarantee an optimal solution. It is apparent from numerical experiments with real-world data that a heuristic algorithm may be necessary to solve these problems efficiently. Finally, once the strategic decision to install QCMs has been made, operational decisions, such as those concerning battery pack charging/discharging based on usage and the availability of battery packs eligible for battery swapping, need to be addressed.
















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}