A Novel Command-Filtered Adaptive Backstepping Control Strategy with Prescribed Performance for Photovoltaic Grid-Connected Systems


Abstract
:1. Introduction
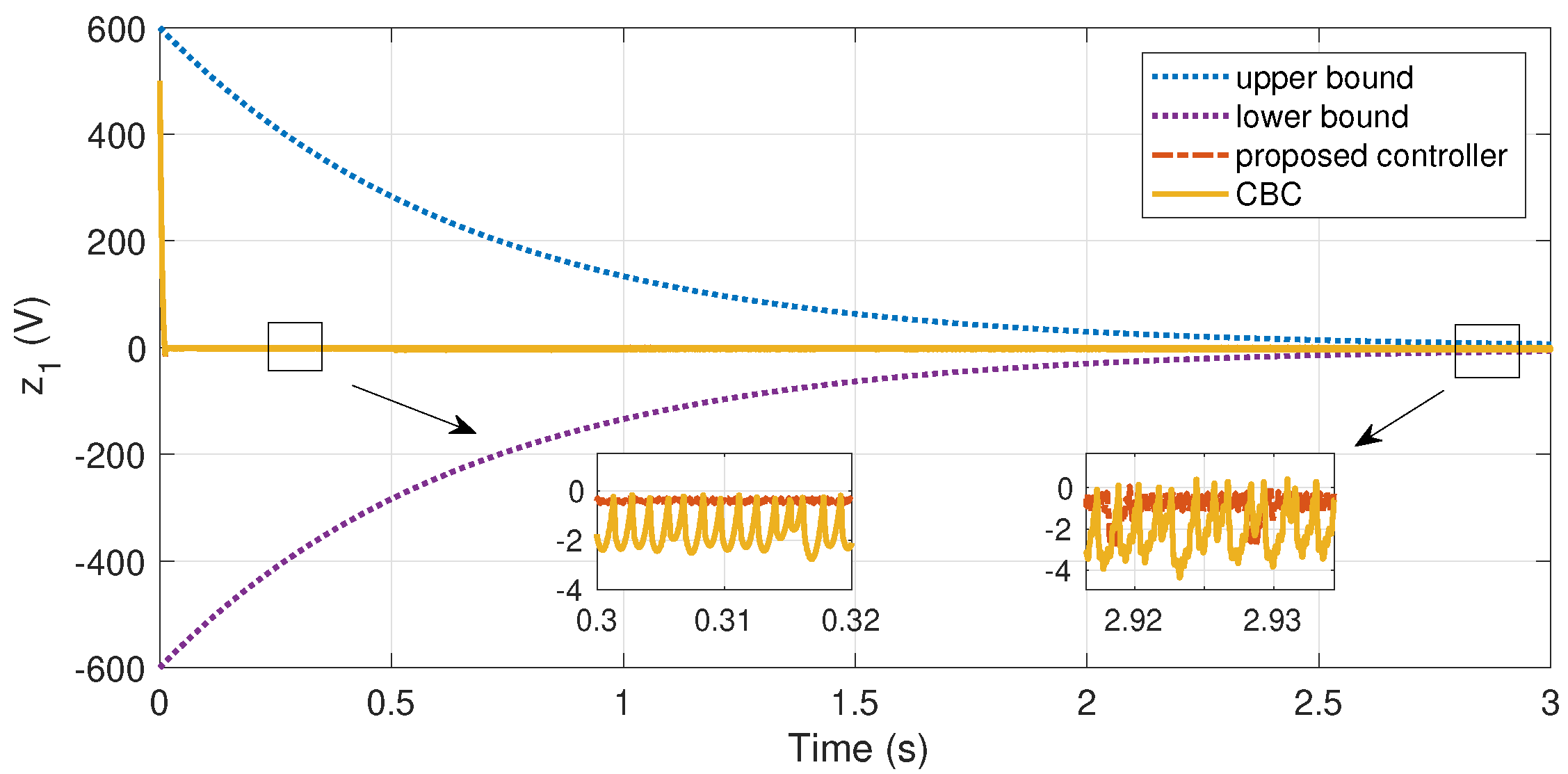
- The prescribed performance technique is introduced in the command-filtered backstepping sliding mode controller to constrain the voltage tracking error within the preset range, namely, enable the DC bus voltage which possesses the prescribed performance, which constitutes to the stable operation of the PV grid-connected system.
- The integral sliding mode control method is considered in the controller design process to improve the robustness of the system, and the stability of the prescribed performance-based control strategy is proved via the Lyapunov stability criterion.
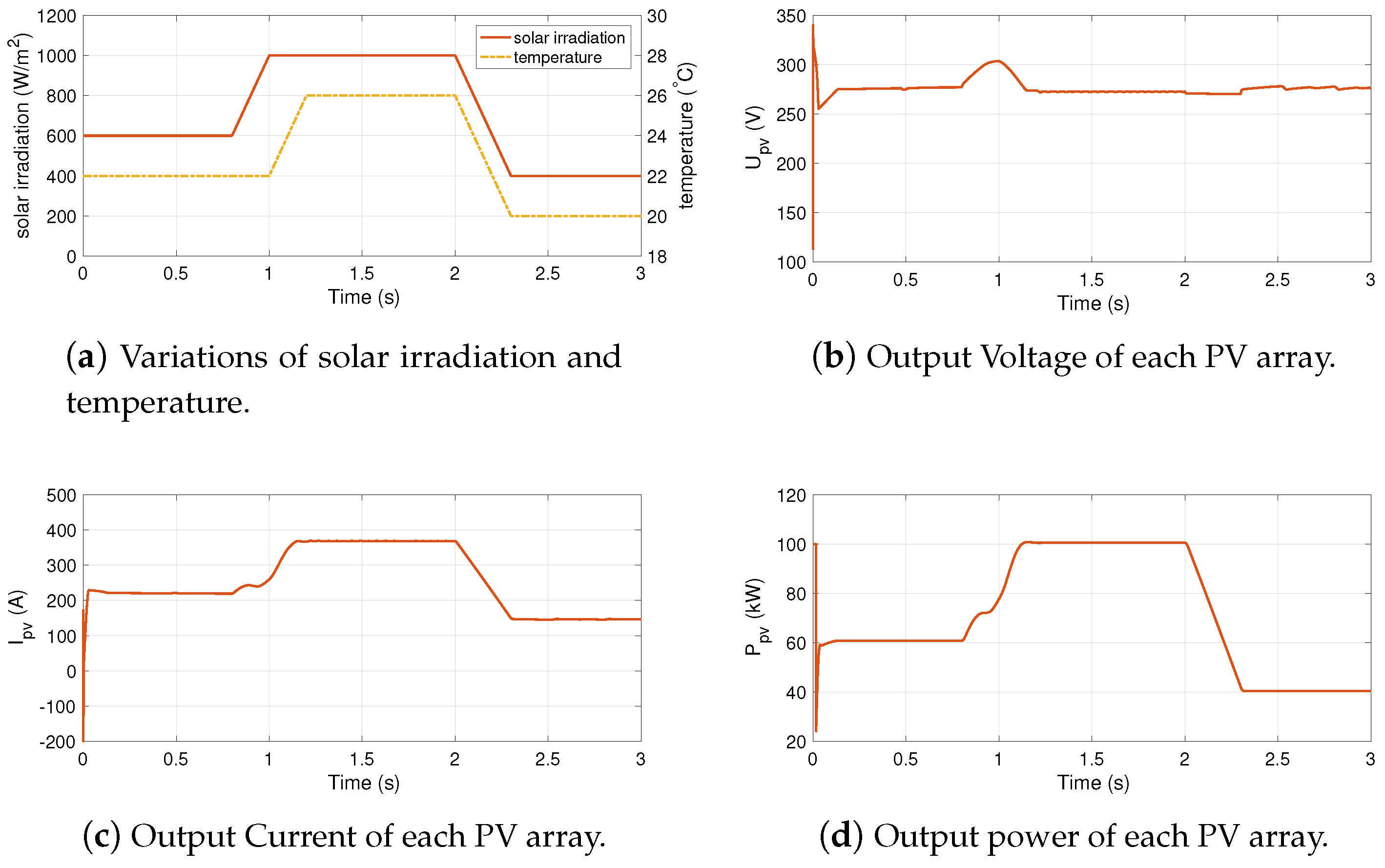
- The environmental variations of PV arrays, including solar irradiation and temperature, are reasonably considered in the system to test the stability of the control system.
2. Materials and Methods
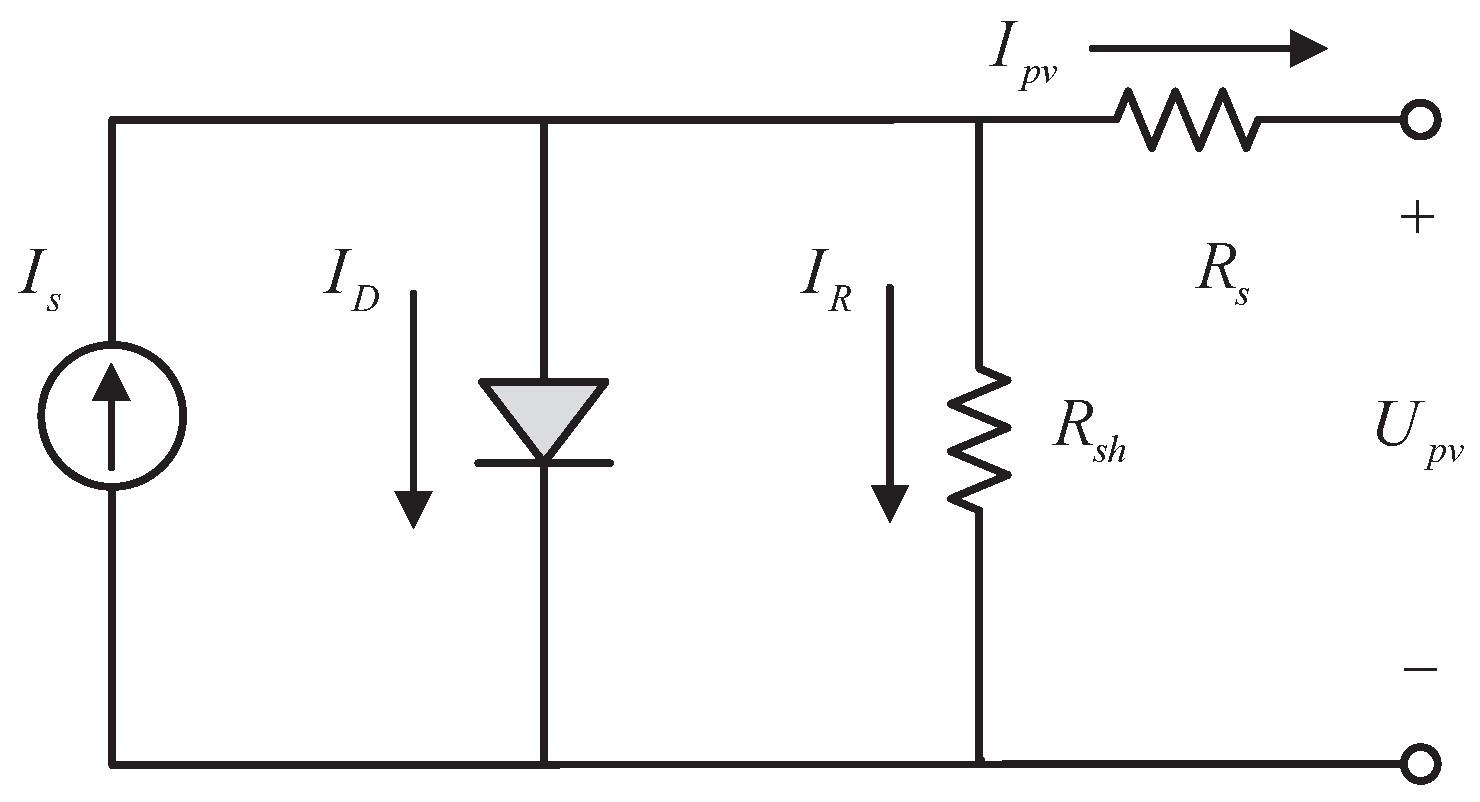
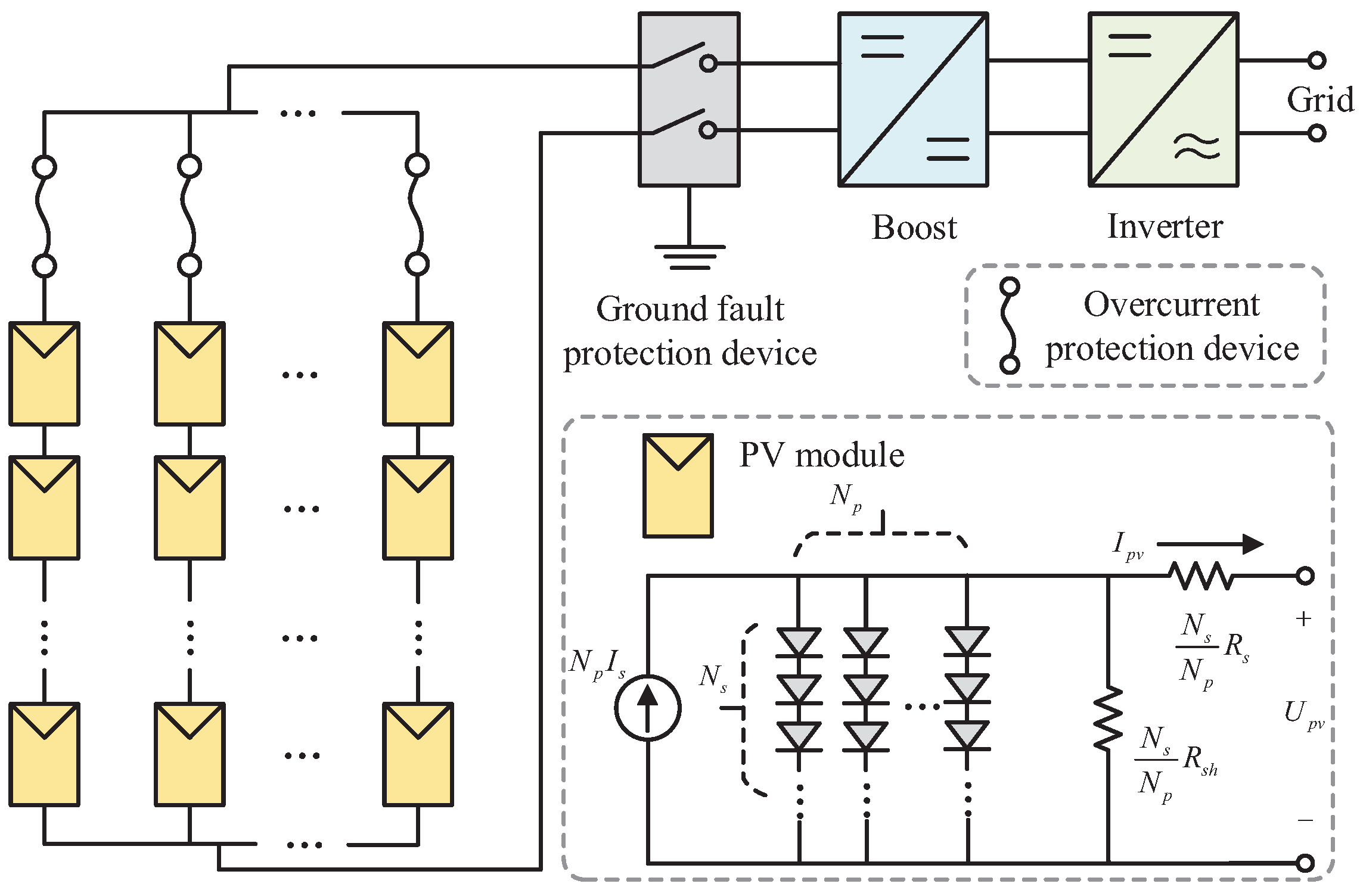
2.1. PV Arrays Modeling
2.2. Mathematical Modeling of PV Grid-Connected Systems
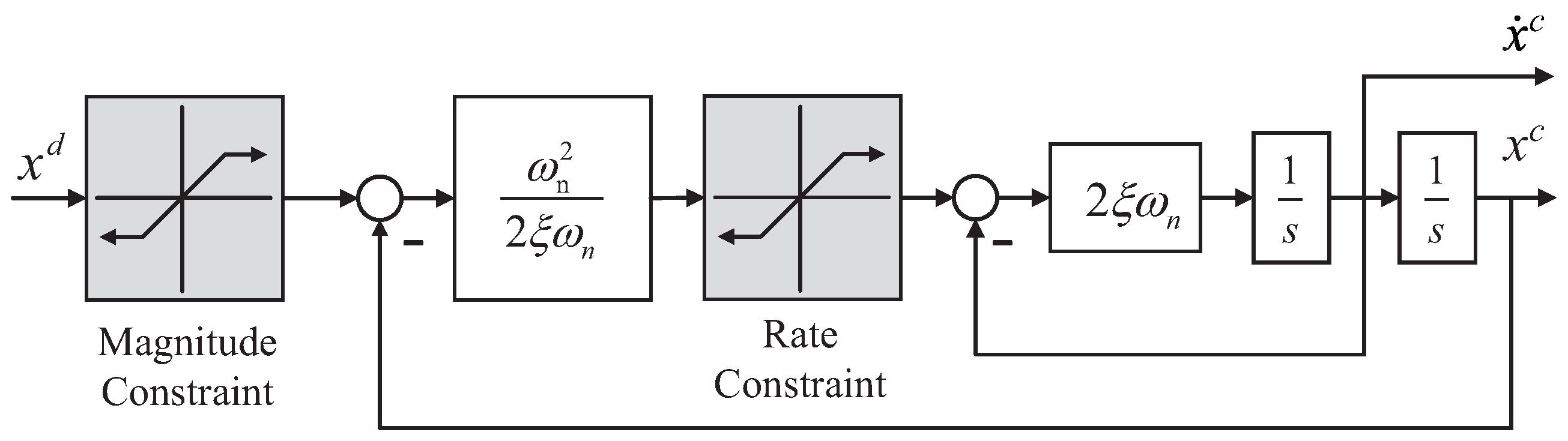
2.3. Basic Principle of Prescribed Performance Control
2.4. Proposed Controller Design for Grid-Connected Inverter and Stability Proof
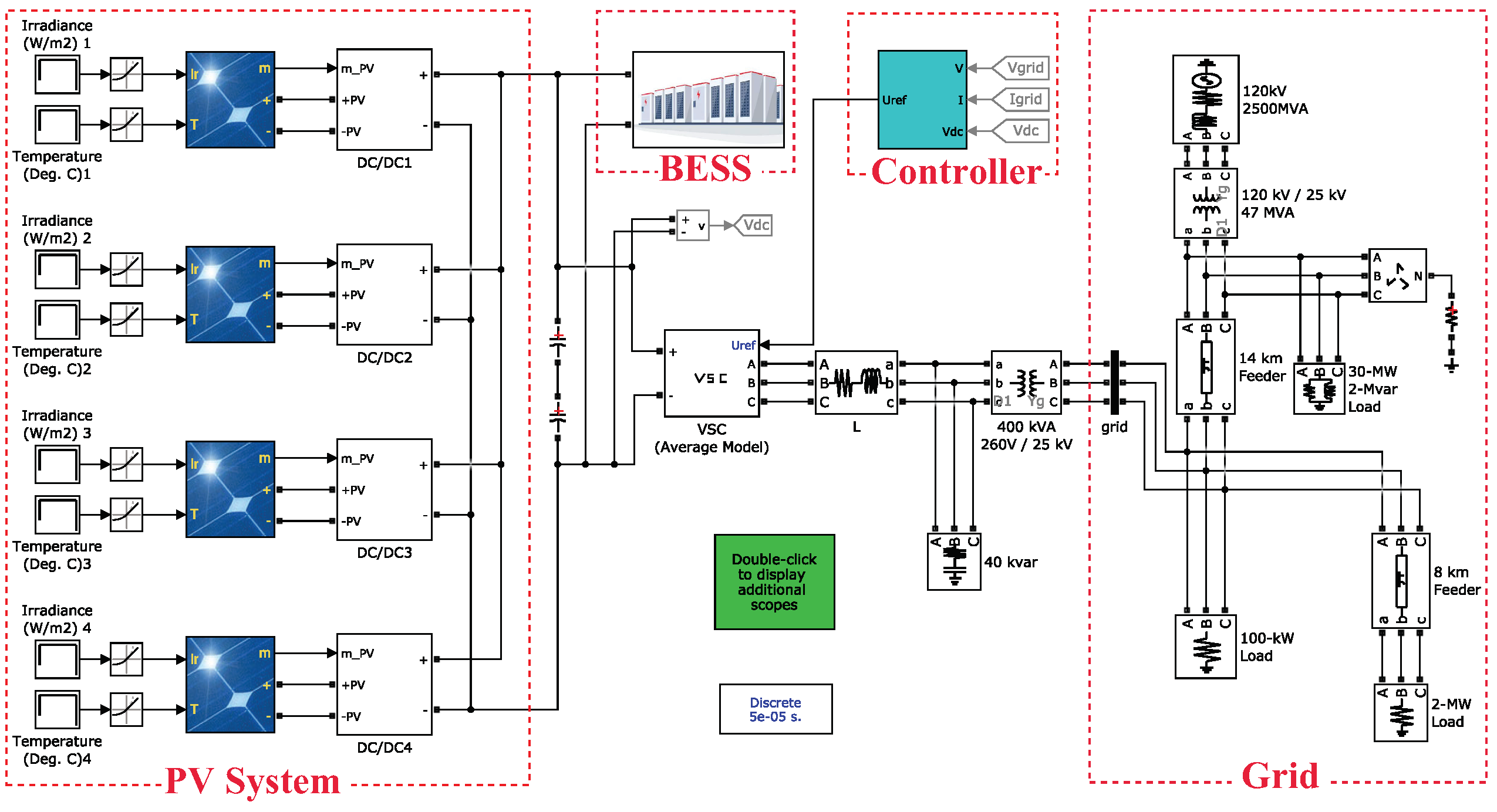
3. Results and Discussion
4. Conclusions
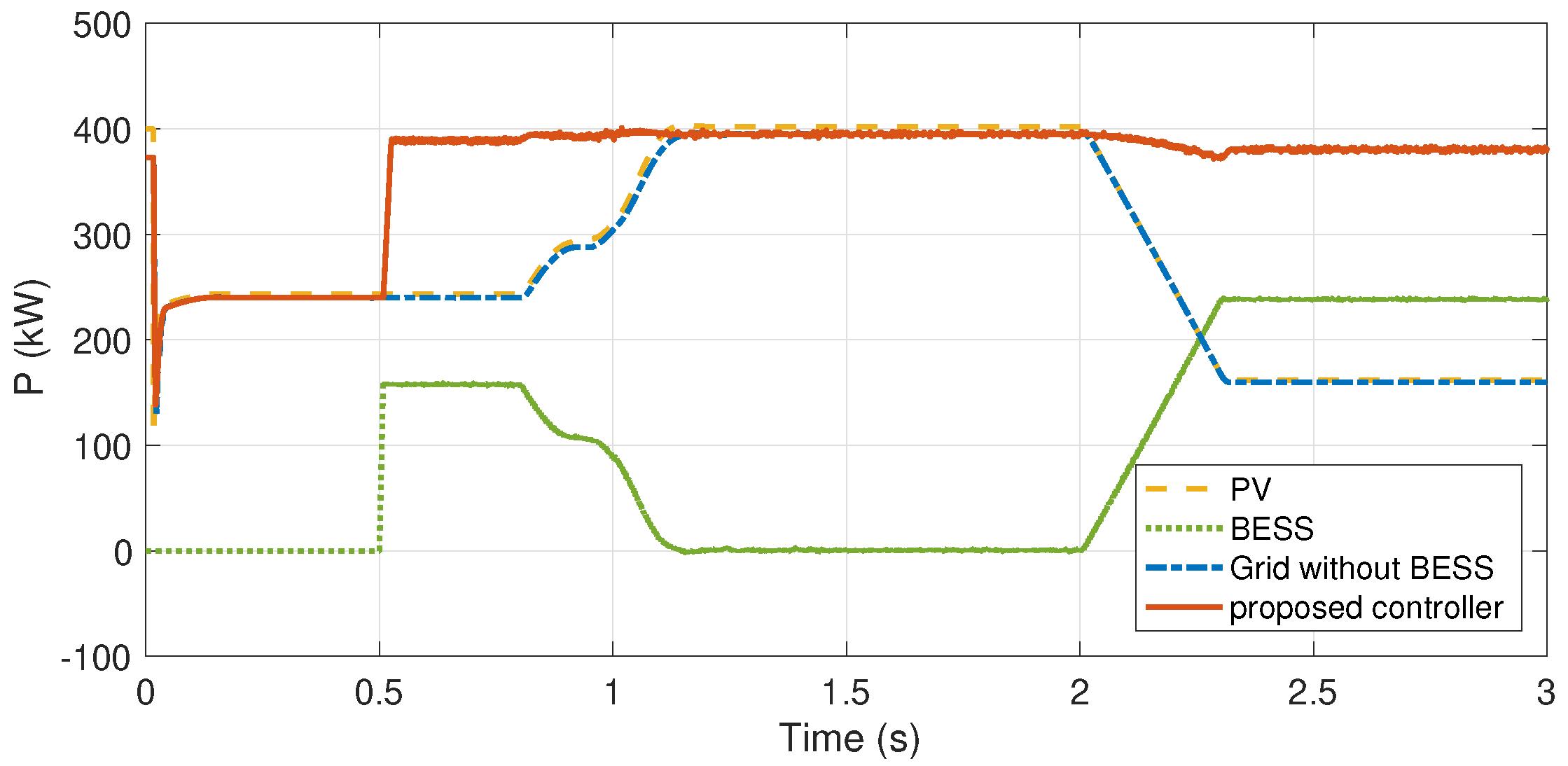
- The proposed control strategy exhibits great performance for power and voltage control of the PV grid-connected system with unknown system parameters and constantly variable environmental conditions.
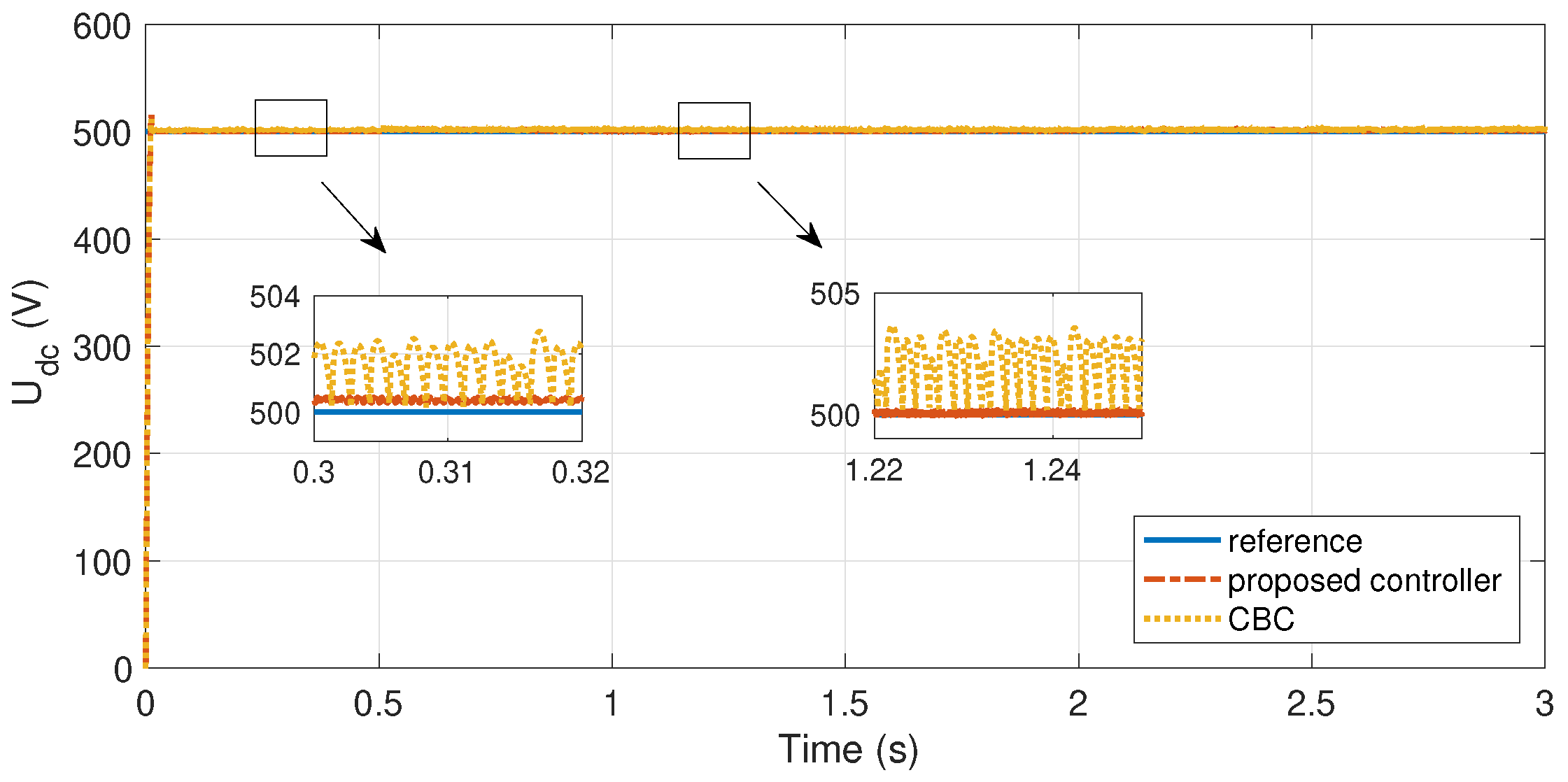
- The DC bus voltage tracking error is constrained within the preset range owing to the introduction of prescribed performance technique, which guarantees high tracking precision and constitutes to the stable operation of the system.
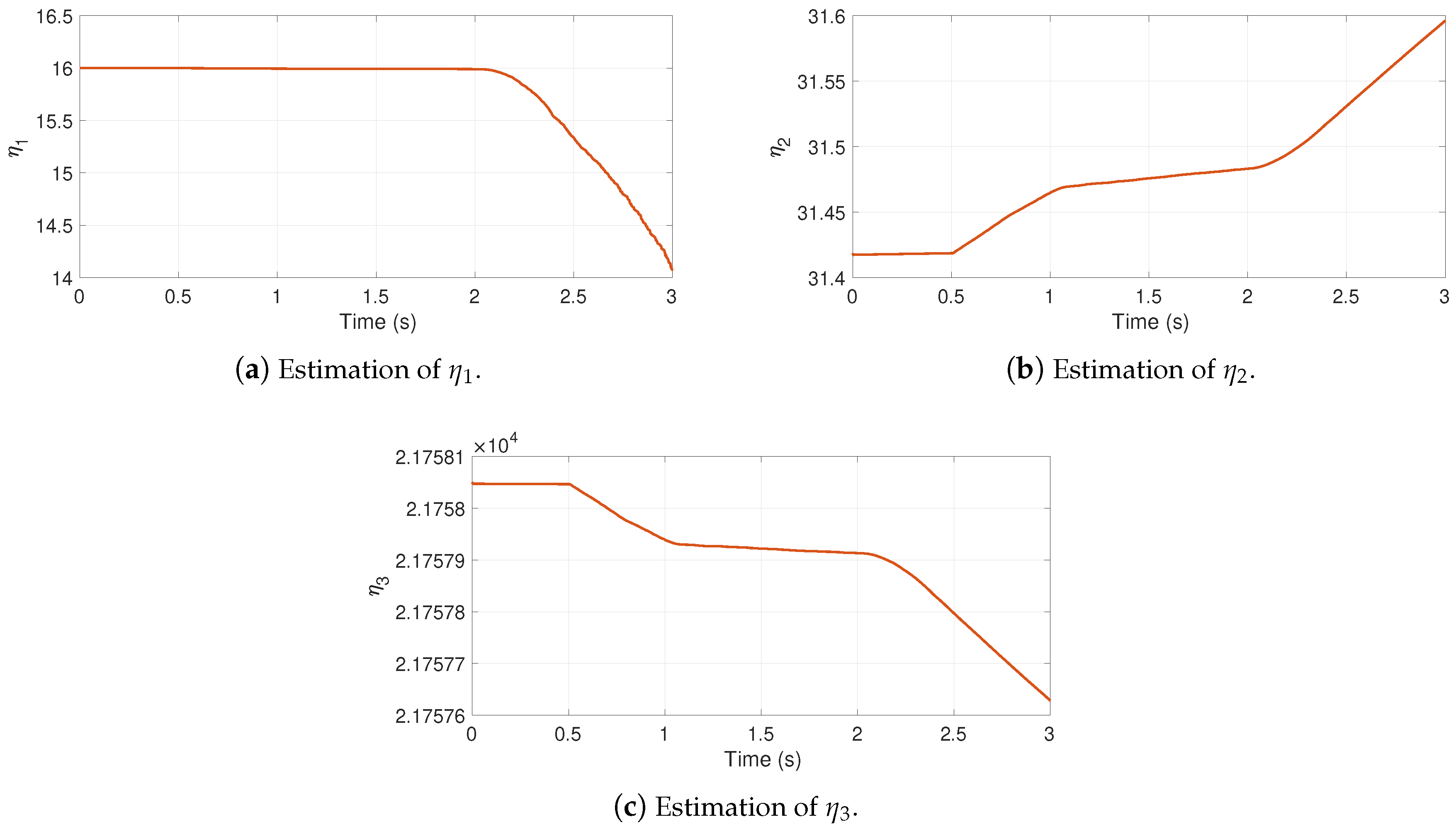
- The introduced projection-based adaptive law provides accurate estimation for system parameters, which is more in line with the actual system.
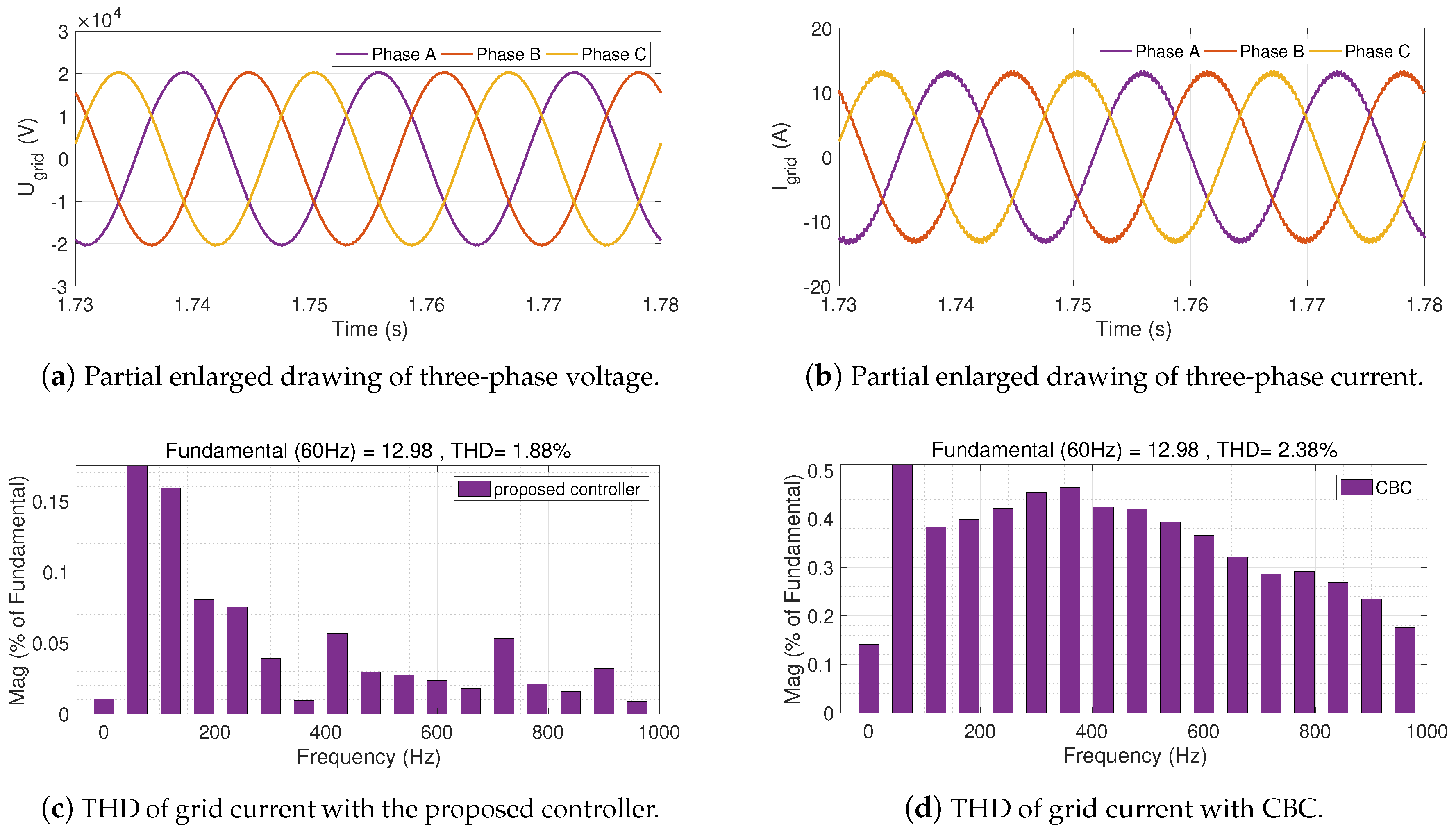
- Comparing with CBC, the prescribed performance-based control strategy owns more stable power delivery and voltage with little fluctuation, which shows better static and dynamic performance of the proposed controller.
Author Contributions
Funding
Conflicts of Interest
Abbreviations
| A | Dimensionless Coefficient |
| BESS | Battery Energy Storage System |
| C | Capacitance of System (F) |
| CBC | Command-Filtered Backstepping Control |
| Grid Voltages in d-q Axis (V) | |
| Band-Gap Power of Semiconductor (W) | |
| Output Current of Boost Circuit (A) | |
| Reverse Saturation Current (A) | |
| Grid Currents in d-q Axis (A) | |
| Diode Current (A) | |
| Input Current of Inverter (A) | |
| Output Current of PV Cell (A) | |
| Corresponding current (A) | |
| Reverse Saturation Current (A) | |
| Photocurrent (A) | |
| Short-Circuit Current (A) | |
| k | Boltzmann Constant |
| Switching Function in d-q Axis | |
| Thermal Coefficient of Current | |
| L | Inductance of System (H) |
| MPPT | Maximum Power Point Tracking |
| Number of PV Cells in Parallel Way | |
| Number of PV Cells in Series Way | |
| PPC | Prescribed Performance Control |
| PV | Photovoltaic |
| q | Elementary Charge (C) |
| R | Resistance of System () |
| Solar Irradiation (W/m) | |
| Reference Solar Irradiation (W/m) | |
| Series Resistance () | |
| Shunt Resistance () | |
| SMC | Sliding Mode Control |
| T | Temperature of PV Cell (C) |
| Reference Temperature of PV Cell (C) | |
| THD | Total Harmonic Distortion |
| DC Bus Voltage (V) | |
| Output Voltage of PV Cell (V) |
References
- Kouro, S.; Leon, J.I.; Vinnikov, D.; Franquelo, L.G. Grid-connected photovoltaic systems: An overview of recent research and emerging PV converter technology. IEEE Ind. Electron. Mag. 2015, 9, 47–61. [Google Scholar] [CrossRef]
- Eltawil, M.A.; Zhao, Z. Grid-connected photovoltaic power systems: Technical and potential problems—A review. Renew. Sustain. Energy Rev. 2010, 14, 112–129. [Google Scholar] [CrossRef]
- Yang, B.; Li, W.; Zhao, Y.; He, X. Design and analysis of a grid-connected photovoltaic power system. IEEE Trans. Power Electron. 2010, 25, 992–1000. [Google Scholar] [CrossRef]
- Li, S.; Wei, Z.; Ma, Y. Fuzzy load-shedding strategy considering photovoltaic output fluctuation characteristics and static voltage stability. Energies 2018, 11, 779. [Google Scholar] [CrossRef] [Green Version]
- Liserre, M.; Teodorescu, R.; Blaabjerg, F. Stability of photovoltaic and wind turbine grid-connected inverters for a large set of grid impedance values. IEEE Trans. Power Electron. 2006, 21, 263–272. [Google Scholar] [CrossRef]
- Li, Y.; Ishikawa, M. An efficient reactive power control method for power network systems with solar photovoltaic generators using sparse optimization. Energies 2017, 10, 696. [Google Scholar] [CrossRef] [Green Version]
- Zhang, Q.; Zhou, L.; Mao, M.; Xie, B.; Zheng, C. Power quality and stability analysis of large-scale grid-connected photovoltaic system considering non-linear effects. IET Power Electron. 2018, 11, 1739–1747. [Google Scholar] [CrossRef]
- Mahmud, M.A.; Pota, H.; Hossain, M. Dynamic stability of three-phase grid-connected photovoltaic system using zero dynamic design approach. IEEE J. Photovoltaics 2012, 2, 564–571. [Google Scholar] [CrossRef]
- Yıldıran, N.; Tacer, E. A new approach to H-infinity control for grid-connected inverters in photovoltaic generation systems. Electr. Power Components Syst. 2019, 47, 1413–1422. [Google Scholar] [CrossRef]
- Zhu, Y.; Fei, J. Adaptive global fast terminal sliding mode control of grid-connected photovoltaic system using fuzzy neural network approach. IEEE Access 2017, 5, 9476–9484. [Google Scholar] [CrossRef]
- Xu, D.; Wang, G.; Yan, W.; Yan, X. A novel adaptive command-filtered backstepping sliding mode control for PV grid-connected system with energy storage. Sol. Energy 2019, 178, 222–230. [Google Scholar] [CrossRef] [Green Version]
- Farrell, J.A.; Polycarpou, M.; Sharma, M.; Dong, W. Command filtered backstepping. IEEE Trans. Autom. Control 2009, 54, 1391–1395. [Google Scholar] [CrossRef]
- Yu, J.; Shi, P.; Zhao, L. Finite-time command filtered backstepping control for a class of nonlinear systems. Automatica 2018, 92, 173–180. [Google Scholar] [CrossRef]
- Shen, Q.; Shi, P. Distributed command filtered backstepping consensus tracking control of nonlinear multiple-agent systems in strict-feedback form. Automatica 2015, 53, 120–124. [Google Scholar] [CrossRef]
- Cui, G.; Xu, S.; Lewis, F.L.; Zhang, B.; Ma, Q. Distributed consensus tracking for non-linear multi-agent systems with input saturation: A command filtered backstepping approach. IET Control Theory Appl. 2016, 10, 509–516. [Google Scholar] [CrossRef]
- Yu, J.; Zhao, L.; Yu, H.; Lin, C.; Dong, W. Fuzzy finite-time command filtered control of nonlinear systems with input saturation. IEEE Trans. Cybern. 2017, 48, 2378–2387. [Google Scholar]
- Pan, Y.; Wang, H.; Li, X.; Yu, H. Adaptive command-filtered backstepping control of robot arms with compliant actuators. IEEE Trans. Control Syst. Technol. 2017, 26, 1149–1156. [Google Scholar] [CrossRef]
- Jin, Z.; Zhang, W.; Liu, S.; Gu, M. Command-filtered backstepping integral sliding mode control with prescribed performance for ship roll stabilization. Appl. Sci. 2019, 9, 4288. [Google Scholar] [CrossRef] [Green Version]
- Ren, H.; Deng, G.; Hou, B.; Wang, S.; Zhou, G. Finite-time command filtered backstepping algorithm-based pitch angle tracking control for wind turbine hydraulic pitch systems. IEEE Access 2019, 7, 135514–135524. [Google Scholar] [CrossRef]
- Choi, I.H.; Bang, H.C. Adaptive command filtered backstepping tracking controller design for quadrotor unmanned aerial vehicle. Proc. Inst. Mech. Eng. Part J. Aerosp. Eng. 2012, 226, 483–497. [Google Scholar] [CrossRef]
- Zhao, S.; Dong, W.; Farrell, J.A. Quaternion-based trajectory tracking control of VTOL-UAVs using command filtered backstepping. In Proceedings of the 2013 American Control Conference, Washington, DC, USA, 17–19 June 2013; IEEE: Piscataway, NJ, USA, 2013; pp. 1018–1023. [Google Scholar]
- Bechlioulis, C.P.; Rovithakis, G.A. Robust adaptive control of feedback linearizable MIMO nonlinear systems with prescribed performance. IEEE Trans. Autom. Control 2008, 53, 2090–2099. [Google Scholar] [CrossRef]
- Na, J.; Chen, Q.; Ren, X.; Guo, Y. Adaptive prescribed performance motion control of servo mechanisms with friction compensation. IEEE Trans. Ind. Electron. 2013, 61, 486–494. [Google Scholar] [CrossRef]
- Huang, Y.; Na, J.; Wu, X.; Liu, X.; Guo, Y. Adaptive control of nonlinear uncertain active suspension systems with prescribed performance. ISA Trans. 2015, 54, 145–155. [Google Scholar] [CrossRef]
- Kostarigka, A.K.; Doulgeri, Z.; Rovithakis, G.A. Prescribed performance tracking for flexible joint robots with unknown dynamics and variable elasticity. Automatica 2013, 49, 1137–1147. [Google Scholar] [CrossRef]
- Zhou, Q.; Li, H.; Wang, L.; Lu, R. Prescribed performance observer-based adaptive fuzzy control for nonstrict-feedback stochastic nonlinear systems. IEEE Trans. Syst. Man Cybern. Syst. 2017, 48, 1747–1758. [Google Scholar] [CrossRef]
- Qiu, J.; Sun, K.; Wang, T.; Gao, H. Observer-based fuzzy adaptive event-triggered control for pure-feedback nonlinear systems with prescribed performance. IEEE Trans. Fuzzy Syst. 2019, 27, 2152–2162. [Google Scholar] [CrossRef]
- Belhachat, F.; Larbes, C. Modeling, analysis and comparison of solar photovoltaic array configurations under partial shading conditions. Sol. Energy 2015, 120, 399–418. [Google Scholar] [CrossRef]
- Dhoke, A.; Sharma, R.; Saha, T.K. An approach for fault detection and location in solar PV systems. Sol. Energy 2019, 194, 197–208. [Google Scholar] [CrossRef]
- Liu, D.; Yang, G.H. Data-driven adaptive sliding mode control of nonlinear discrete-time systems with prescribed performance. IEEE Trans. Syst. Man Cybern. Syst.s 2019, 49, 2598–2604. [Google Scholar] [CrossRef]
- Jiang, B.; Xu, D.; Shi, P.; Lim, C.C. Adaptive neural observer-based backstepping fault tolerant control for near space vehicle under control effector damage. IET Control Theory Appl. 2014, 8, 658–666. [Google Scholar] [CrossRef]
- Chen, H.; Wang, H. Numerical simulation for conservative fractional diffusion equations by an expanded mixed formulation. J. Comput. Appl. Math. 2016, 296, 480–498. [Google Scholar] [CrossRef]












{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Definition | Parameter | Value |
|---|---|---|
| Maximum output power | 315.072 W | |
| Open-circuit voltage | 64.6 V | |
| Short-circuit current | 6.14 A | |
| Voltage at maximum power point | 54.7 V | |
| Current at maximum power point | 5.76 A |
| Classification | Parameter | Value | Parameter | Value | Parameter | Value |
|---|---|---|---|---|---|---|
| R | 1 m | 5 m | 400 kW | |||
| PV grid-connected system | L | 45 H | 5 mH | f | 60 Hz | |
| C | 50 mF | 0.1 mF | 500 V | |||
| 250 | 5 | l | 1.5 | |||
| 8000 | 60,000 | 80,000 | ||||
| Proposed controller | 0.1 | 0.1 | 0.1 | |||
| 3 | 3 | 0.9 | ||||
| 0.5 | 300 | 0.1 |
© 2020 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Zhang, W.; Pan, T.; Wu, D.; Xu, D. A Novel Command-Filtered Adaptive Backstepping Control Strategy with Prescribed Performance for Photovoltaic Grid-Connected Systems. Sustainability 2020, 12, 7429. https://doi.org/10.3390/su12187429
Zhang W, Pan T, Wu D, Xu D. A Novel Command-Filtered Adaptive Backstepping Control Strategy with Prescribed Performance for Photovoltaic Grid-Connected Systems. Sustainability. 2020; 12(18):7429. https://doi.org/10.3390/su12187429
Chicago/Turabian StyleZhang, Weiming, Tinglong Pan, Dinghui Wu, and Dezhi Xu. 2020. "A Novel Command-Filtered Adaptive Backstepping Control Strategy with Prescribed Performance for Photovoltaic Grid-Connected Systems" Sustainability 12, no. 18: 7429. https://doi.org/10.3390/su12187429