Dynamic-Area-Based Shortest-Path Algorithm for Intelligent Charging Guidance of Electric Vehicles



Abstract
:1. Introduction
- (1)
- Based on the charging request point and the users’ next destination, a dynamic-area model is proposed. The area extension algorithm (AEA) and the charging station attribution algorithm (CAA) are added to ensure validity and scalability of the model. The constructed model can intelligently match the charging station area in accordance with the direction of users’ destination and provide charging guidance.
- (2)
- The Dijkstra algorithm is improved based on the dynamic-area model by limiting the node searching area. The improved shortest-path algorithm divides the charging guidance problem into three steps. It not only guarantees the users-oriented shortest-path planning but also effectively reduces time complexity.
2. The Dynamic-Area Model
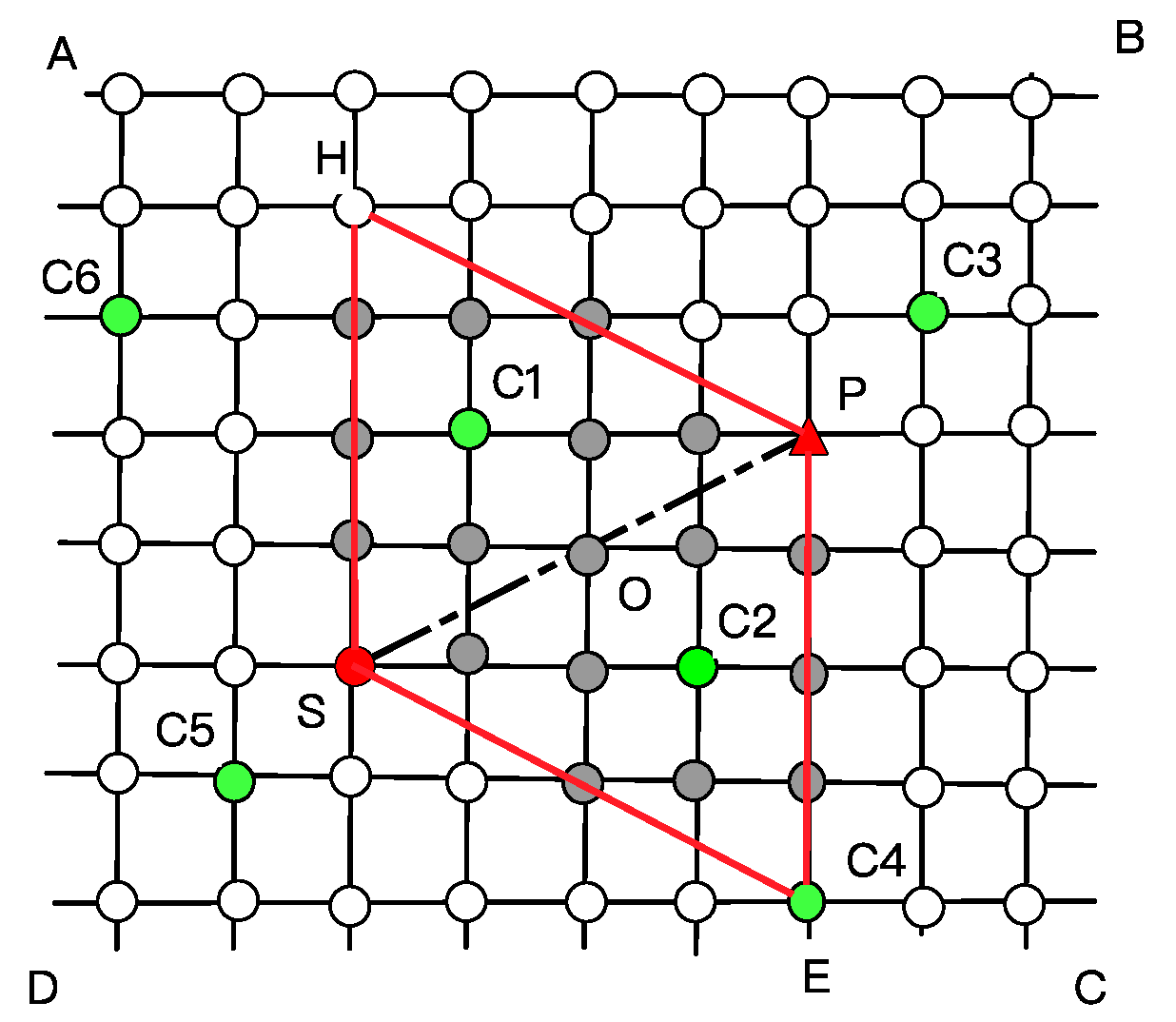
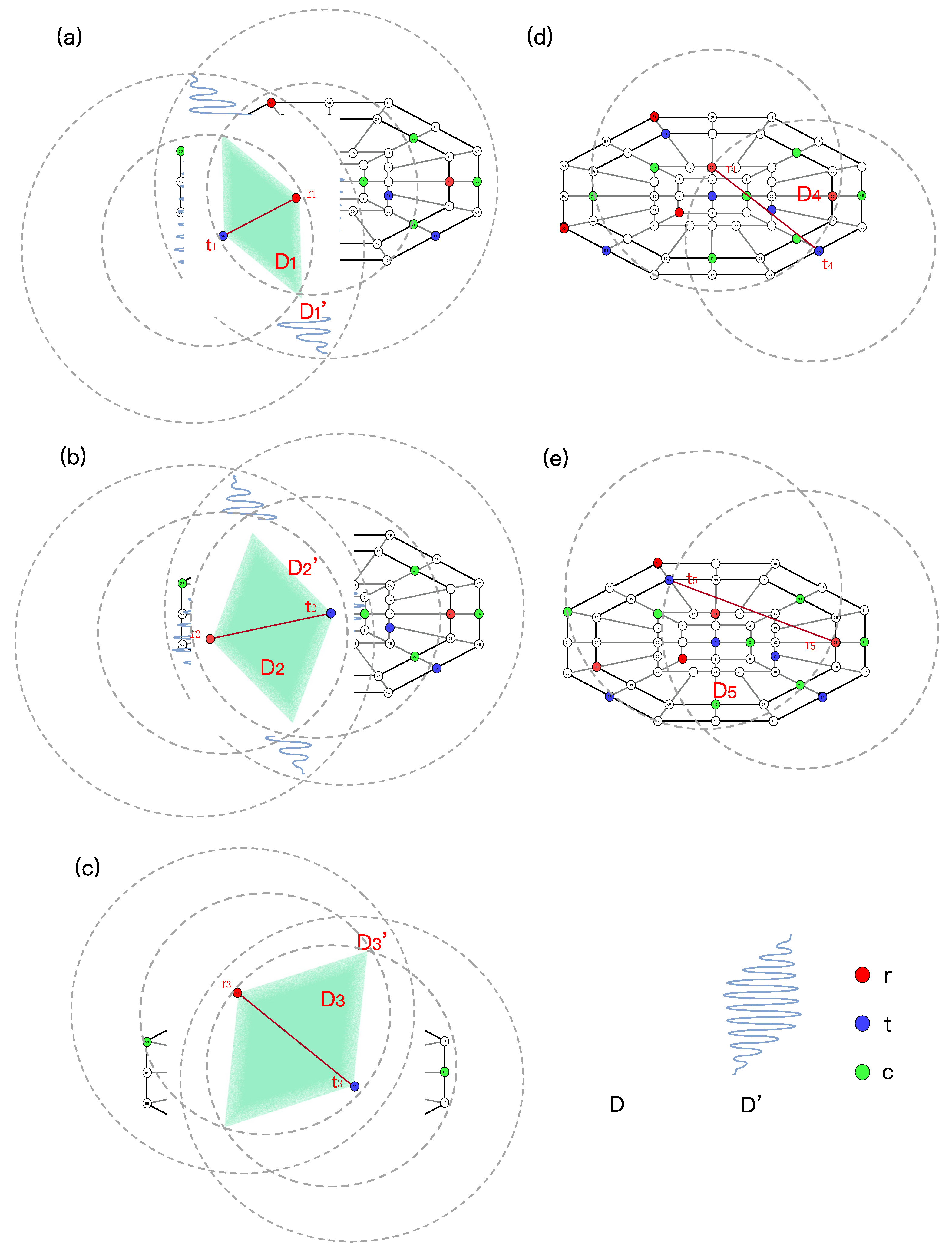
2.1. Restricted Area Initialization
- The line segments of SP and HE show the symmetry of up-down and the symmetry of left-right, respectively.
- The number of nodes contained in the area is significantly smaller than that in the area ABCD.
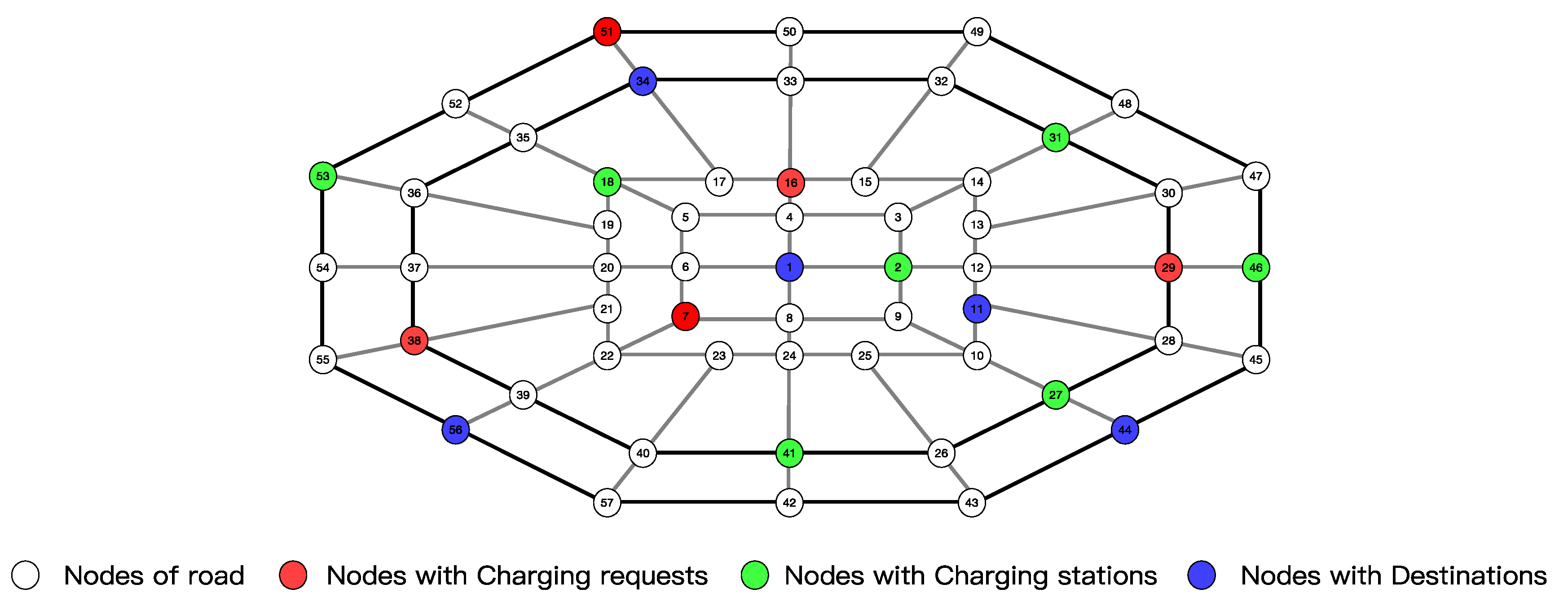
- The charging station nodes C1 and C2 in the area match with the direction of the users’ next destination and also meet the users’ travel demand.
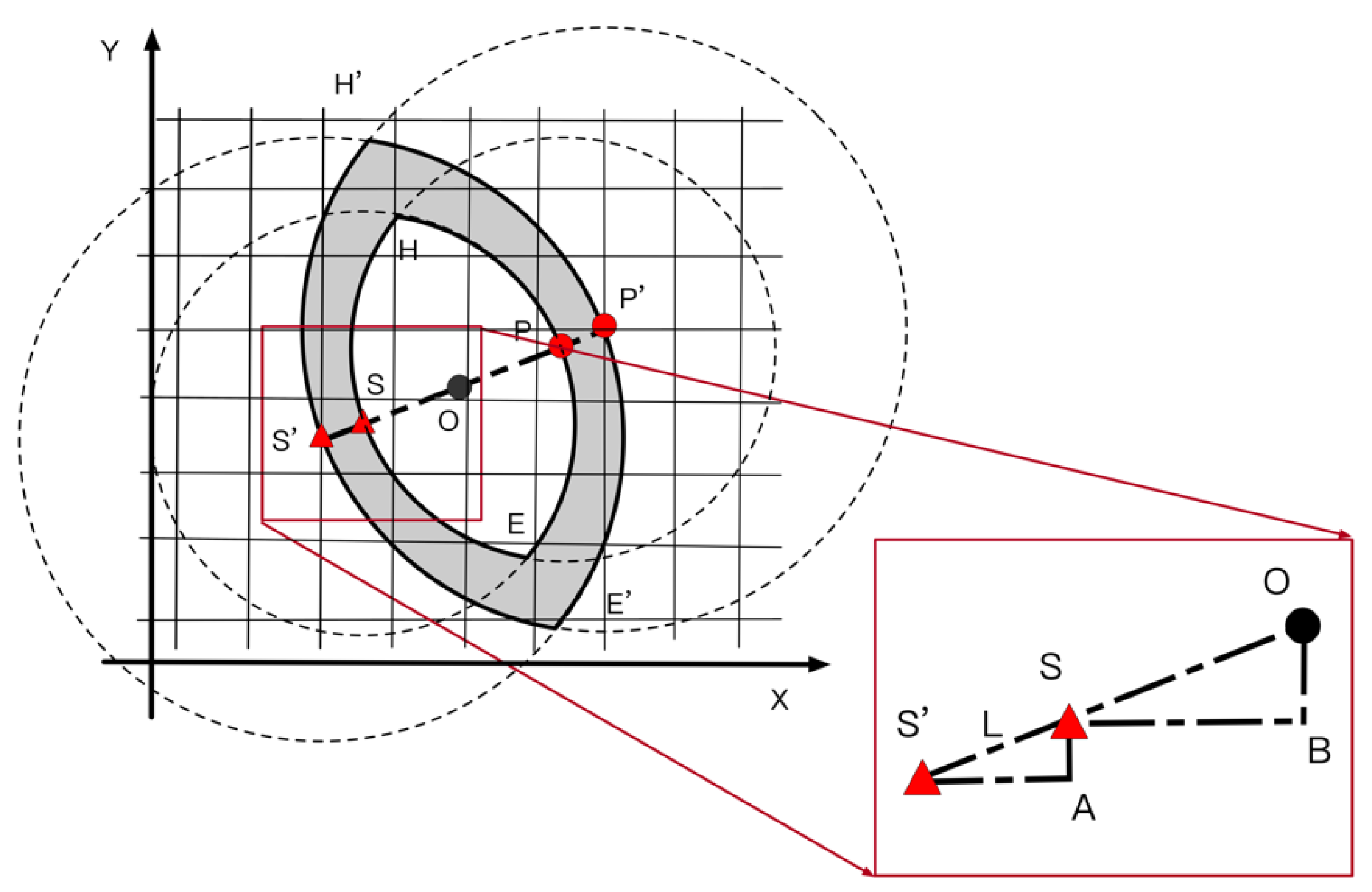
2.2. Dynamic-Area Construction
3. Intelligent Charging Guidance Strategy
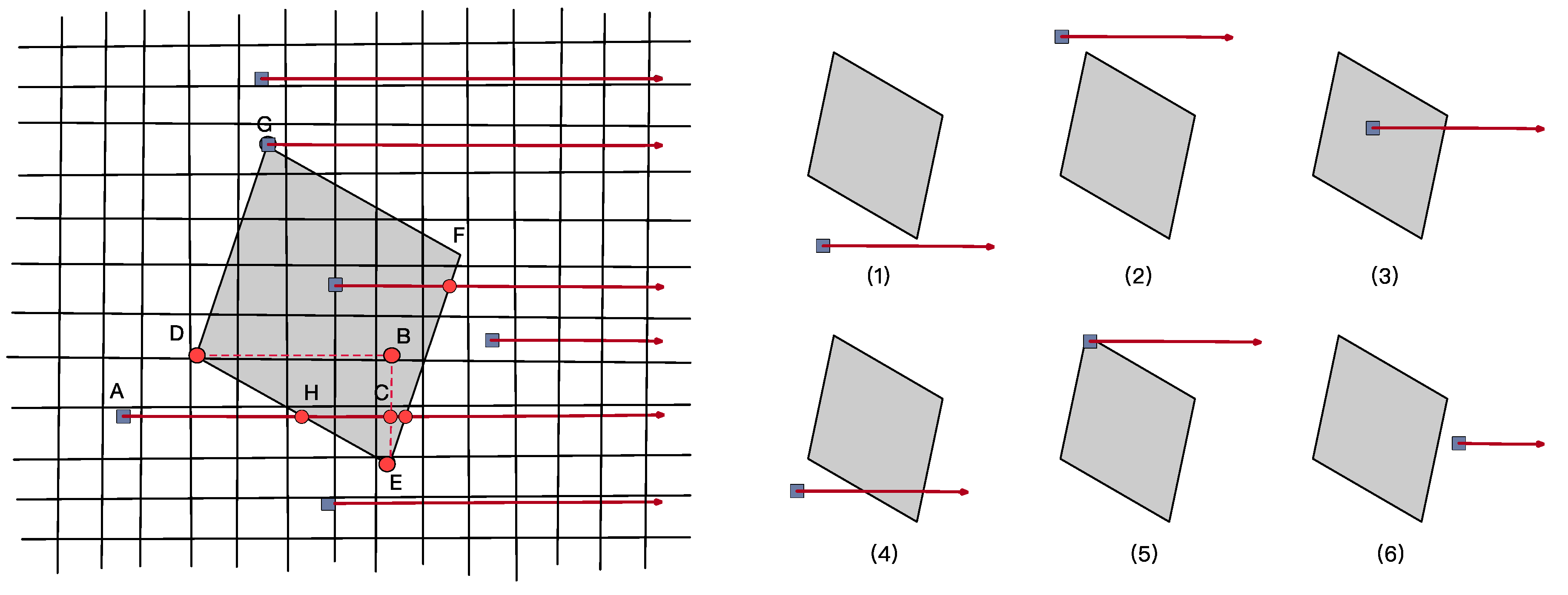
3.1. CAA Description
- (1)
- The rays and the points are below the area;
- (2)
- The rays and the points are above the area;
- (3)
- Both the rays and the points are in the area;
- (4)
- The rays pass through the area and the points to the left of the area;
- (5)
- The rays are outside the area, and the points are at the area boundary;
- (6)
- The rays and the points are to the right of the area.
3.2. Dijkstra for Improving Node Searching Area
- -
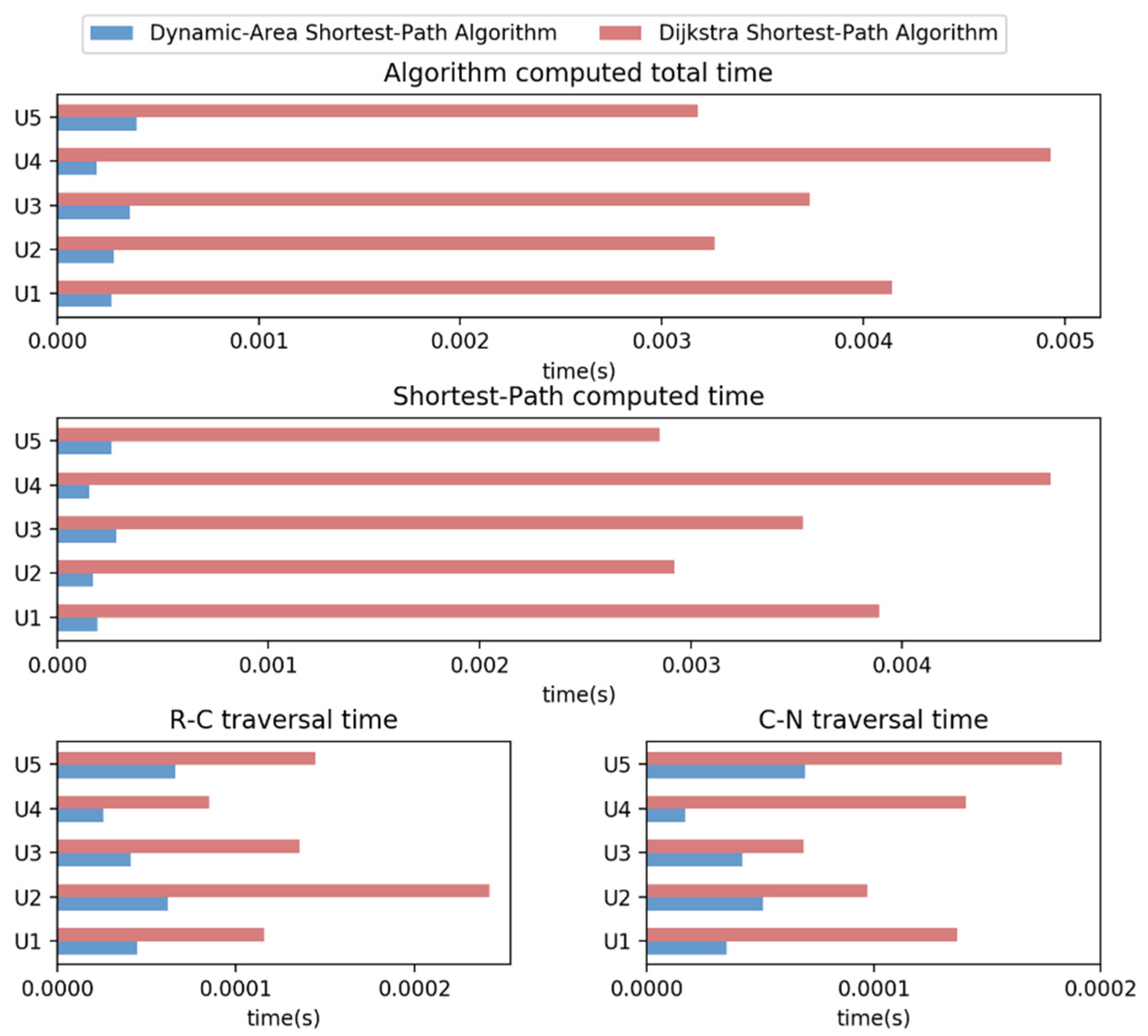
- Step 1: R-C (Request point to Charging station). R-C indicates the shortest-path guidance from the charging request point to the charging station. The shortest-path distance is = , and its corresponding node set is .
- -
- Step 2: C-N (Charging station to Next destination). C-N indicates the shortest-path guidance from the charging station to the next destination. The shortest-path distance is , and its corresponding node set is .
- -
- Step 3: R-N (Request point to Next destination). R-N indicates the process of the dynamic-area shortest-path algorithm from the charging request point to the next destination.
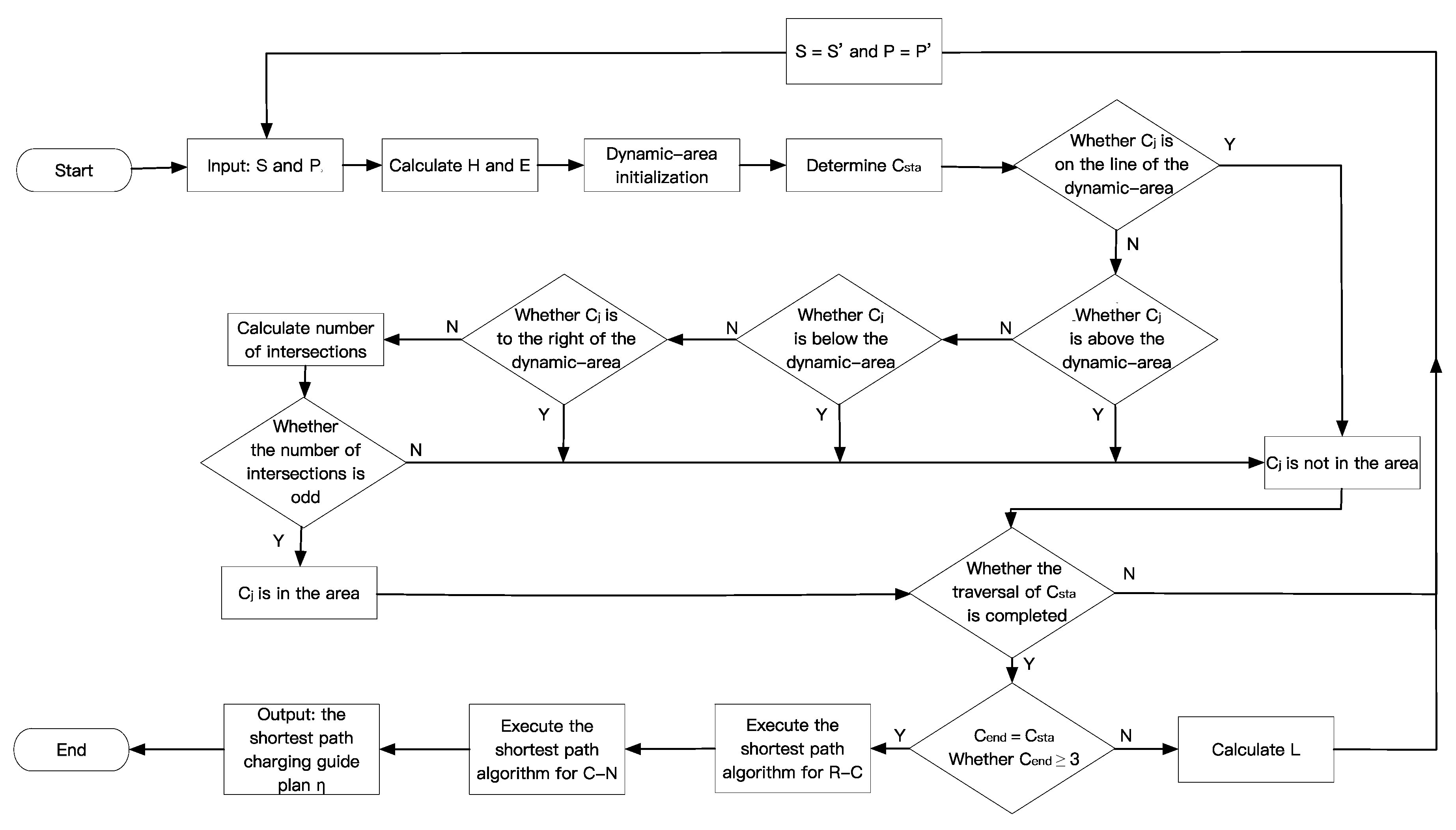
3.3. Strategy Structure
- -
- Step 1: Determine and set ; , HE points were calculated by Equations (6) and (7). The dynamic area model was established with points HPES.
- -
- Step 2: Determine the list of charging stations in the area. According to the CAA, traverse the charging stations to determine whether they are within the dynamic area.
- -
- Step 3: Determine the list of charging stations in the dynamic area; the list length is n. Set the sufficient number of charging stations in the dynamic area as 3. If , execute the AEA and return Step 2; otherwise, execute Step 4.
- -
- Step 4: Calculate the R-C and C-N distance of each station in the dynamic area. Then, get the R-N calculation results and the list of charging station guidance strategies.
- -
- Step 5: Calculate the shortest-path charging station guidance strategy .
4. Simulation and Results
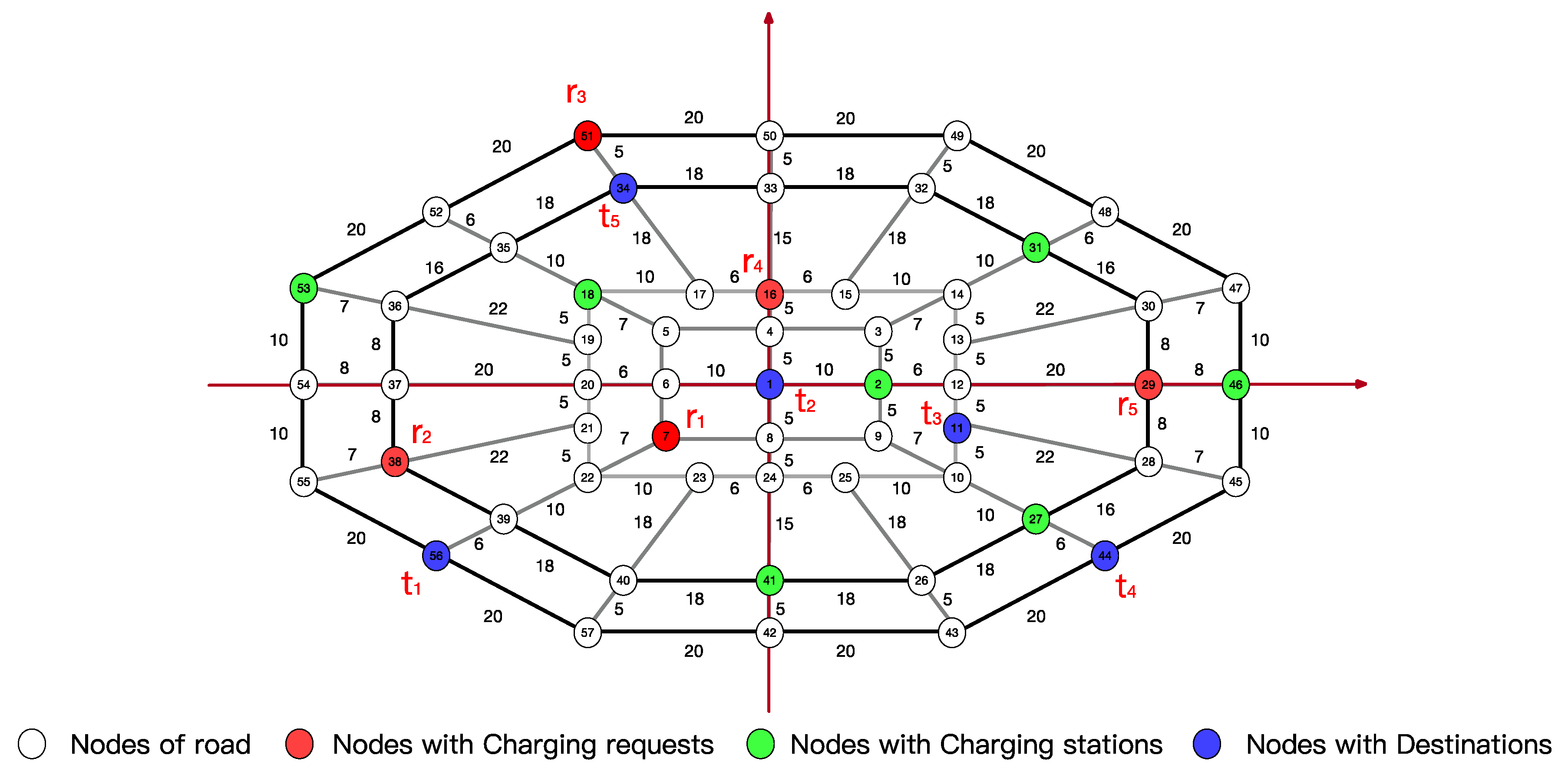
4.1. Road Network Model
4.2. Results and Discussion
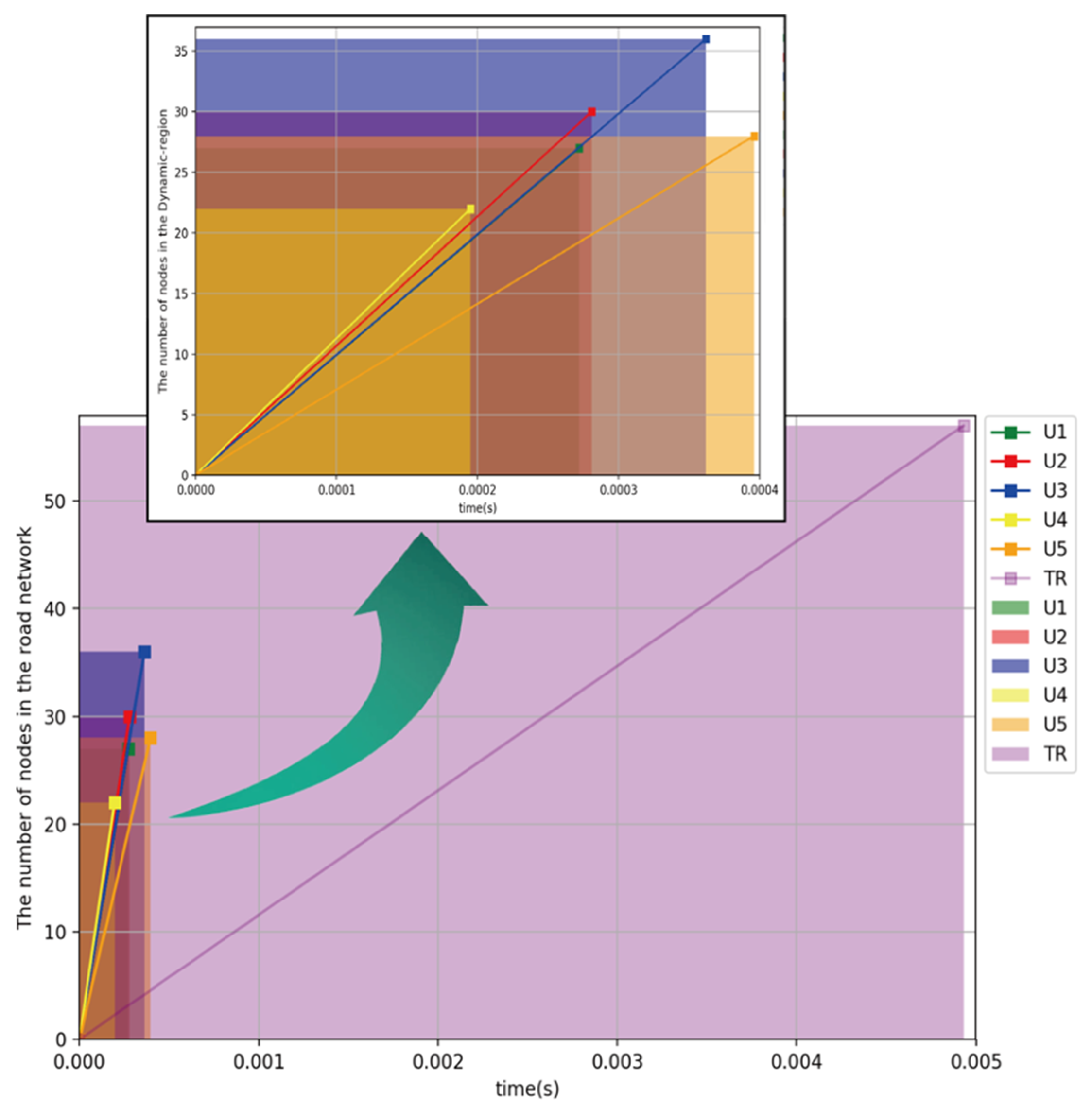
4.3. Comparison of Execution Time
5. Conclusions
Author Contributions
Funding
Conflicts of Interest
References
- Lin, Z.-P.; Wang, H.-S.; Tsai, S.-J. The Intelligent Charging Path Planning for Electric Vehicle. Int. J. Comput. Netw. Wirel. Mob. Commun. (IJCNWMC) 2016, 6, 1–8. [Google Scholar]
- Bonges, H.A.; Lusk, A. Addressing electric vehicle (EV) sales and range anxiety through parking layout, policy and regulation. Transp. Res. Part. A Policy Pract. 2016, 83, 63–73. [Google Scholar] [CrossRef] [Green Version]
- Guo, F.; Yang, J.; Lu, J. The battery charging station location problem: Impact of users’ range anxiety and distance convenience. Transp. Res. Part. E Logist. Transp. Rev. 2018, 114, 1–18. [Google Scholar] [CrossRef]
- Li, S.; Tong, L.; Xing, J.; Zhou, Y. The Market for Electric Vehicles: Indirect Network Effects and Policy Design. J. Assoc. Environ. Resour. Econ. 2017, 4, 89–133. [Google Scholar] [CrossRef]
- Dong, J.; Xie, M.; Zhao, L.; Shang, D. A framework for electric vehicle charging-point network optimization. IBM J. Res. Dev. 2013, 57, 15:1–15:9. [Google Scholar] [CrossRef]
- Gong, L.; Cao, W.; Liu, K.; Zhao, J.; Li, X. Spatial and Temporal Optimization Strategy for Plug-In Electric Vehicle Charging to Mitigate Impacts on Distribution Network. Energies 2018, 11, 1373. [Google Scholar] [CrossRef] [Green Version]
- Suyono, H.; Rahman, M.T.; Mokhlis, H.; Othman, M.; Illias, H.A.; Mohamad, H. Optimal Scheduling of Plug-in Electric Vehicle Charging Including Time-of-Use Tariff to Minimize Cost and System Stress. Energies 2019, 12, 1500. [Google Scholar] [CrossRef] [Green Version]
- Kongjeen, Y.; Bhumkittipich, K. Impact of Plug-in Electric Vehicles Integrated into Power Distribution System Based on Voltage-Dependent Power Flow Analysis. Energies 2018, 11, 1571. [Google Scholar] [CrossRef] [Green Version]
- Gao, Y.; Guo, S.; Ren, J.; Zhao, Z.; Ehsan, A.; Zheng, Y. An Electric Bus Power Consumption Model and Optimization of Charging Scheduling Concerning Multi-External Factors. Energies 2018, 11, 2060. [Google Scholar] [CrossRef] [Green Version]
- Mao, T.; Zhang, X.; Zhou, B. Intelligent Energy Management Algorithms for EV-charging Scheduling with Consideration of Multiple EV Charging Modes. Energies 2019, 12, 265. [Google Scholar] [CrossRef] [Green Version]
- Lopez, K.L.; Gagne, C.; Gardner, M.-A. Demand-Side Management Using Deep Learning for Smart Charging of Electric Vehicles. IEEE Trans. Smart Grid 2018, 10, 2683–2691. [Google Scholar] [CrossRef]
- Wang, Y.; Bi, J.; Zhao, X.; Guan, W. A geometry-based algorithm to provide guidance for electric vehicle charging. Transp. Res. Part. D Transp. Environ. 2018, 63, 890–906. [Google Scholar] [CrossRef]
- Baum, M.; Dibbelt, J.; Gemsa, A.; Wagner, D.; Zündorf, T. Shortest Feasible Paths with Charging Stops for Battery Electric Vehicles. In Proceedings of the 23rd SIGSPATIAL International Conference on Advances in Geographic Information Systems-GIS’ 15, Seattle, WA, USA, 3–6 November 2015; pp. 1–10. [Google Scholar]
- Chunping, Y.; Qi, Z.; Bing, Q.; Bin, L.; Gaoying, C. Charge and discharge scheduling strategy of electric vehicle based on interest and travel intention of users. Electr. Meas. Instrum. 2018, 684, 112–118. [Google Scholar]
- Schwenk, K.; Faix, M.; Mikut, R.; Hagenmeyer, V.; Appino, R.R. On Calendar-Based Scheduling for User-Friendly Charging of Plug-In Electric Vehicles. In Proceedings of the 2019 IEEE 2nd Connected and Automated Vehicles Symposium (CAVS), Honolulu, HI, USA, 22–23 September 2019; pp. 1–5. [Google Scholar]
- De, H.J.; Alpcan, T.; Brazil, M.; Thomas, D.; Mareels, I. A Market Mechanism for Electric Vehicle Charging Under Network Constraints. IEEE Trans. Smart Grid 2015, 7, 827–836. [Google Scholar] [CrossRef]
- Wang, Y.; Bi, J.; Guan, W.; Zhao, X. Optimising route choices for the travelling and charging of battery electric vehicles by considering multiple objectives. Transp. Res. Part. D Transp. Environ. 2018, 64, 246–261. [Google Scholar] [CrossRef]
- Fei, W.; Li, Z.; Ye, M. Review on research of impact of electric vehicles charging on power grids and its optimal dispatch. South. Power Syst. Technol. 2016, 10, 71–80. [Google Scholar]
- Vandael, S.; Claessens, B.; Ernst, D.; Holvoet, T.; Deconinck, G. Reinforcement Learning of Heuristic EV Fleet Charging in a Day-Ahead Electricity Market. IEEE Trans. Smart Grid 2015, 6, 1. [Google Scholar] [CrossRef] [Green Version]
- Tan, J.; Wang, L. Real-time charging navigation of electric vehicles: A non-cooperative game approach. In Proceedings of the 2015 IEEE Power & Energy Society General Meeting, Denver, CO, USA, 26–30 July 2015; pp. 1–5. [Google Scholar] [CrossRef]
- Chau, S.C.-K.; Elbassioni, K.; Tseng, C.-M. Drive Mode Optimization and Path Planning for Plug-In Hybrid Electric Vehicles. IEEE Trans. Intell. Transp. Syst. 2017, 18, 3421–3432. [Google Scholar] [CrossRef] [Green Version]
- Liu, H.; Yin, W.; Yuan, X.; Niu, M. Reserving Charging Decision-Making Model and Route Plan for Electric Vehicles Considering Information of Traffic asnd Charging Station. Sustainability 2018, 10, 1324. [Google Scholar] [CrossRef] [Green Version]
- Black, A. Optimizing urban mass transit systems: A general model. Transp. Res. Rec. 1976, 610, 12–18. [Google Scholar]
- Zhang, Y.; Aliya, B.; Zhou, Y.; You, I.; Zhang, X.; Pau, G.; Collotta, M. Shortest feasible paths with partial charging for battery-powered electric vehicles in smart cities. Pervasive Mob. Comput. 2018, 50, 82–93. [Google Scholar] [CrossRef]
- Wang, Y.; Bi, J.; Lu, C.; Ding, C. Route Guidance Strategies for Electric Vehicles by Considering Stochastic Charging Demands in a Time-Varying Road Network. Energies 2020, 13, 2287. [Google Scholar] [CrossRef]
- Luo, S.; Nie, Y. (Marco) On the role of route choice modeling in transit sketchy design. Transp. Res. Part. A Policy Pract. 2020, 136, 223–243. [Google Scholar] [CrossRef]
- Chen, H.; Gu, W.; Cassidy, M.J.; Daganzo, C.F. Optimal transit service atop ring-radial and grid street networks: A continuum approximation design method and comparisons. Transp. Res. Part. B Methodol. 2015, 81, 755–774. [Google Scholar] [CrossRef] [Green Version]
- Shimrat, M. Algorithm 112: Position of point relative to polygon. Commun. ACM 1962, 5, 434. [Google Scholar] [CrossRef]
- Wang, H.; Zhou, X. Improved shortest path algorithm for restricted searching area. J. Nanjing Univ. Sci. Technol. (Nat. Sci.) 2009, 5, 638–642. [Google Scholar]
- Nordbeck, S. Computer cartography, shortest route programs. Lund Stud. Geogr. Ser. C 1969, 9, 53. [Google Scholar]
- Chu, Y.J.; Ma, L.; Zhang, H.Z. Location-allocation and Its Algorithm for Gradual Covering Electric Vehicle Charging Stations. Math. Pract. Theory 2015, 45, 102–106. [Google Scholar]
- Badia, H.; Estrada, M.; Robusté, F. Competitive transit network design in cities with radial street patterns. Transp. Res. Part. B Methodol. 2014, 59, 161–181. [Google Scholar] [CrossRef]
- Miyagawa, M. Optimal hierarchical system of a grid road network. Ann. Oper. Res. 2009, 172, 349–361. [Google Scholar] [CrossRef]
- Fan, W.; Mei, Y.; Gu, W. Optimal design of intersecting bimodal transit networks in a grid city. Transp. Res. Part. B Methodol. 2018, 111, 203–226. [Google Scholar] [CrossRef]














{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| (−10, −5) | (−36, −8) | (−20, 30) | (0, 10) | (36, 0) | |
| (−31, −20) | (0, 0) | (16, −5) | (31, −20) | (−18, 25) |
| Charging Station Node List | Charging Station Coordinates | |
|---|---|---|
| 2 | (10, 0) | |
| 18 | (−16, 10) | |
| 27 | (26, −15) | |
| 31 | (26, 15) | |
| 41 | (0, −25) | |
| 46 | (44, 0) | |
| 53 | (−44, 10) |
| CAA | R | AEA | |||
|---|---|---|---|---|---|
| (7.11, −51.15) | n = 3 | 54.84 | Execute 3 times L = 7.83 | ||
| (−48.11, 26.15) | |||||
| (1.81, 3.44) | |||||
| (−42.82, −28.44) | |||||
| (−47.75, −10.61) | n = 3 | 74.58 | Execute 1 time L = 10.65 | ||
| (−6.54, −55.53) | |||||
| (−29.45, 47.53) | |||||
| (11.75, 2.61) | |||||
| (7.11, −51.15) | n = 4 | 64.55 | Execute 2 times L = 9.22 | ||
| (−48.11, 26.15) | |||||
| (1.81, 3.44) | |||||
| (−42.82, −28.44) | |||||
| (41.48,21.85) | n = 4 | 43.14 | No execution | ||
| (−10.48, −31.85) | |||||
| (0, 10) | |||||
| (31, −20) | |||||
| (30.65, 59.26) | n = 3 | 76.51 | No execution | ||
| (−12.65, −34.26) | |||||
| (36, 0) | |||||
| (−18, 25) |
| TR | ||||||
|---|---|---|---|---|---|---|
| K | 99.26 | 106.83 | 99.47 | 112.82 | 70.70 | 11.56 |
© 2020 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Cai, J.; Chen, D.; Jiang, S.; Pan, W. Dynamic-Area-Based Shortest-Path Algorithm for Intelligent Charging Guidance of Electric Vehicles. Sustainability 2020, 12, 7343. https://doi.org/10.3390/su12187343
Cai J, Chen D, Jiang S, Pan W. Dynamic-Area-Based Shortest-Path Algorithm for Intelligent Charging Guidance of Electric Vehicles. Sustainability. 2020; 12(18):7343. https://doi.org/10.3390/su12187343
Chicago/Turabian StyleCai, Junpeng, Dewang Chen, Shixiong Jiang, and Weijing Pan. 2020. "Dynamic-Area-Based Shortest-Path Algorithm for Intelligent Charging Guidance of Electric Vehicles" Sustainability 12, no. 18: 7343. https://doi.org/10.3390/su12187343