Effects of Design Parameters on Operating Characteristics of an Electric Assisted Bicycle Using Fuel Cell

Abstract
:1. Introduction
2. Establishment of Models
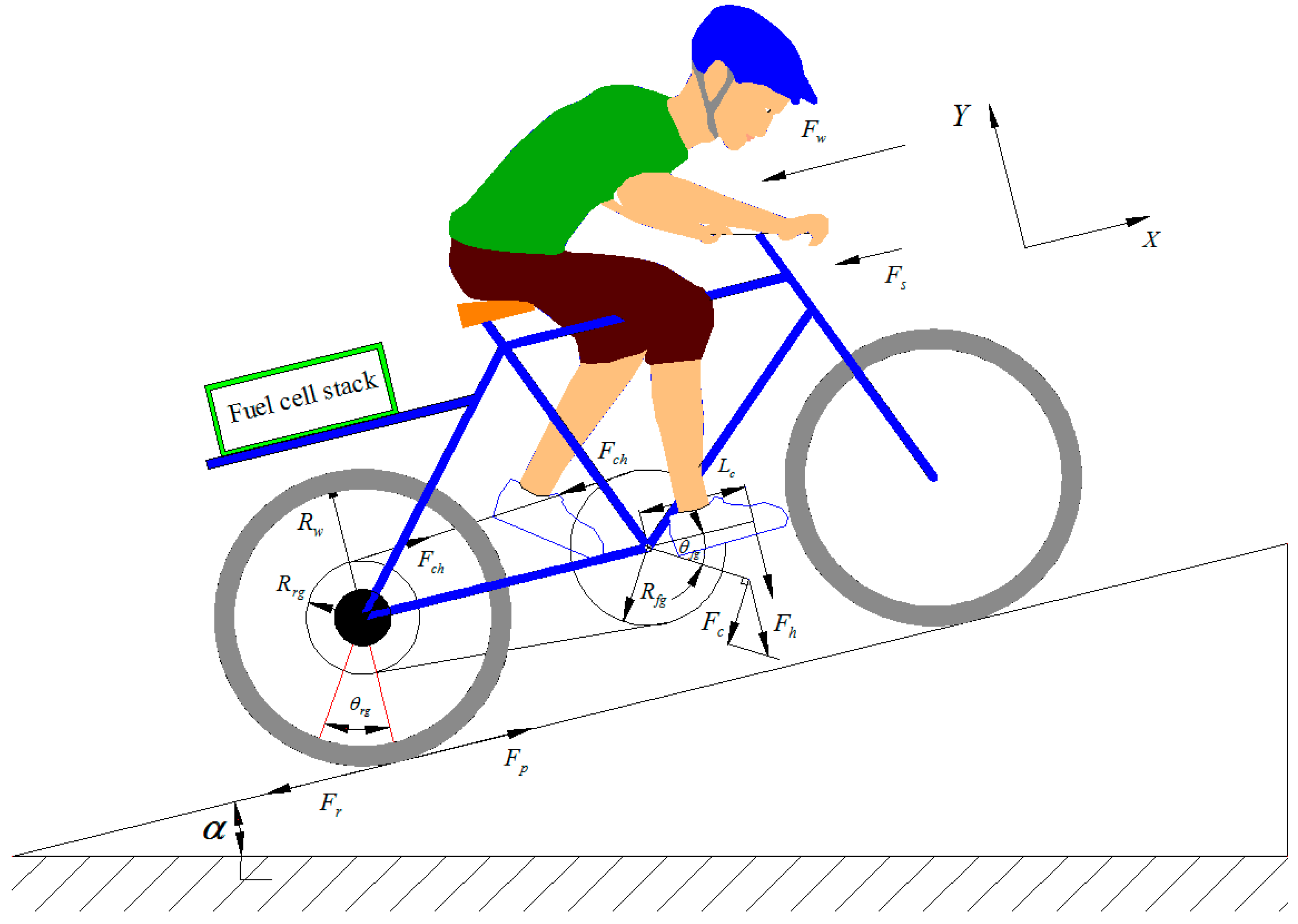
2.1. PAB Dynamic Models
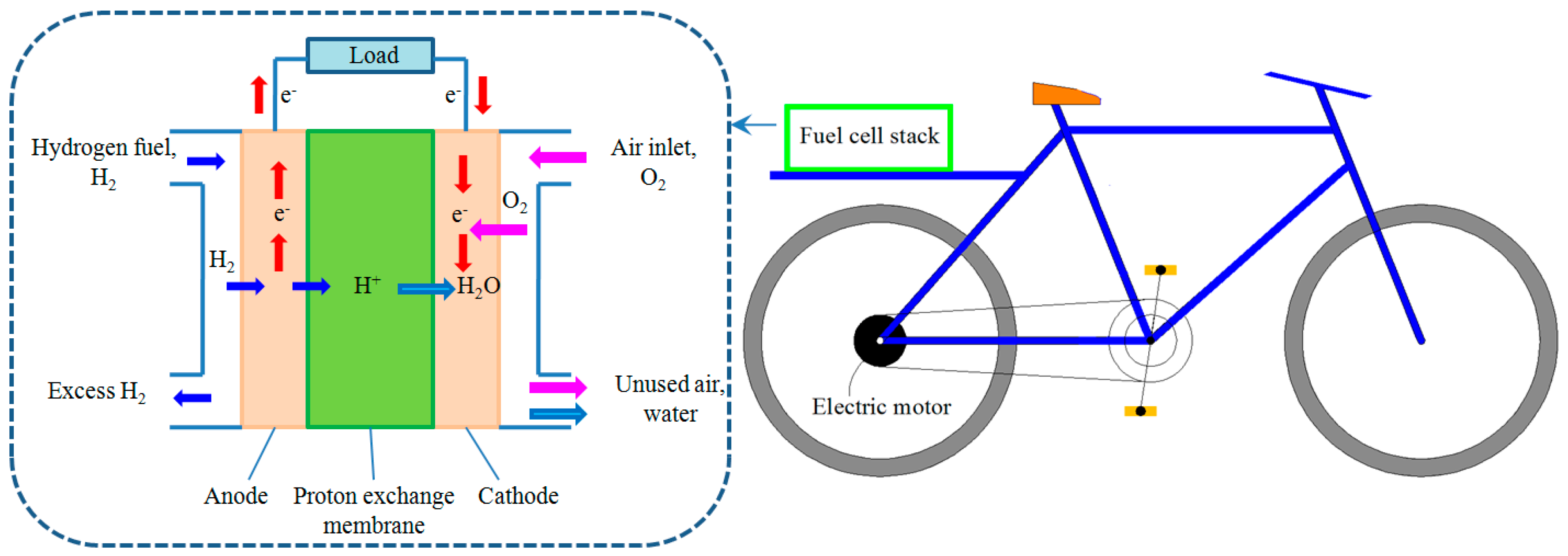
2.2. Mathematical Models of Fuel Cell
3. Simulation Results
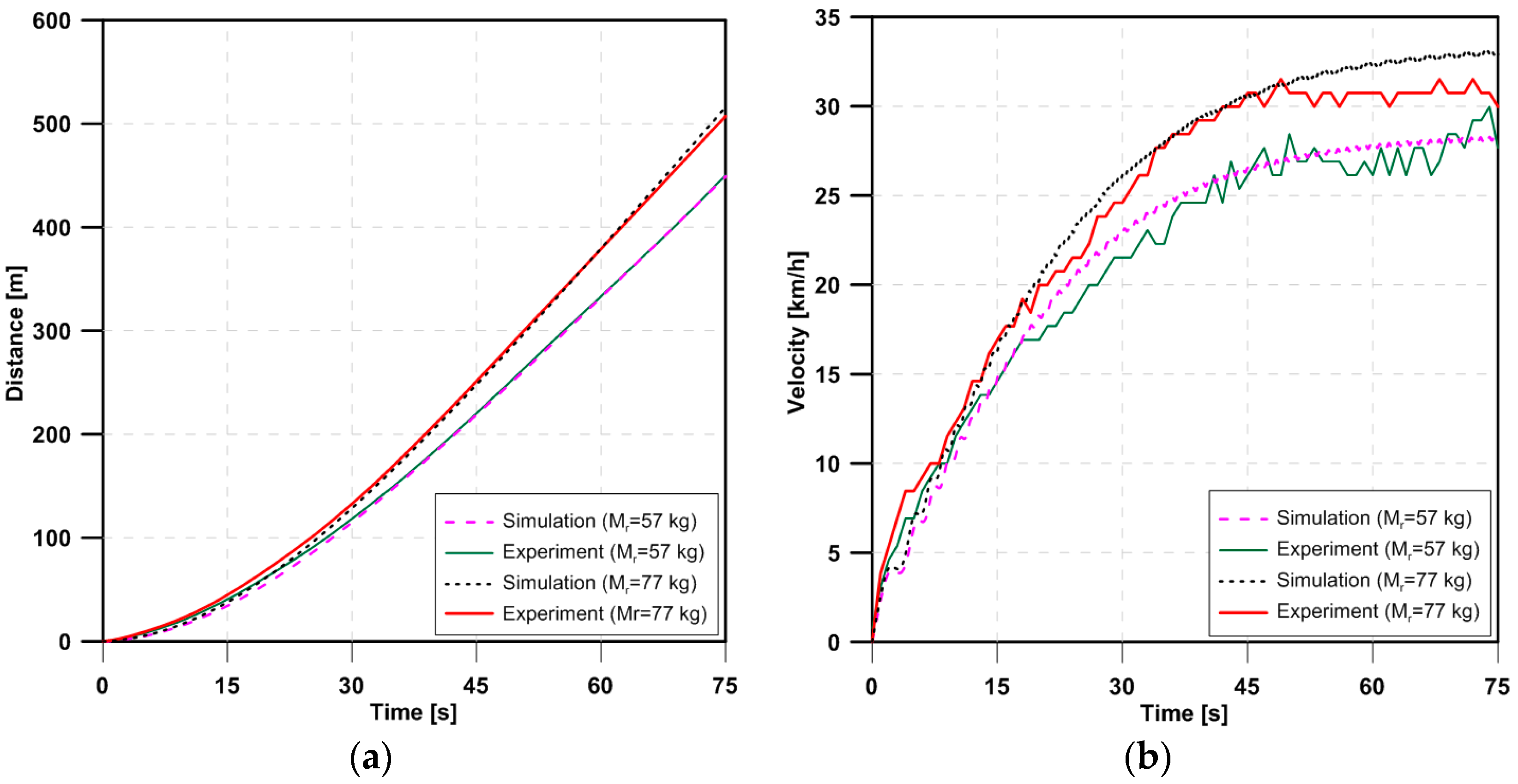
3.1. Comparison between Simulation and Experiment
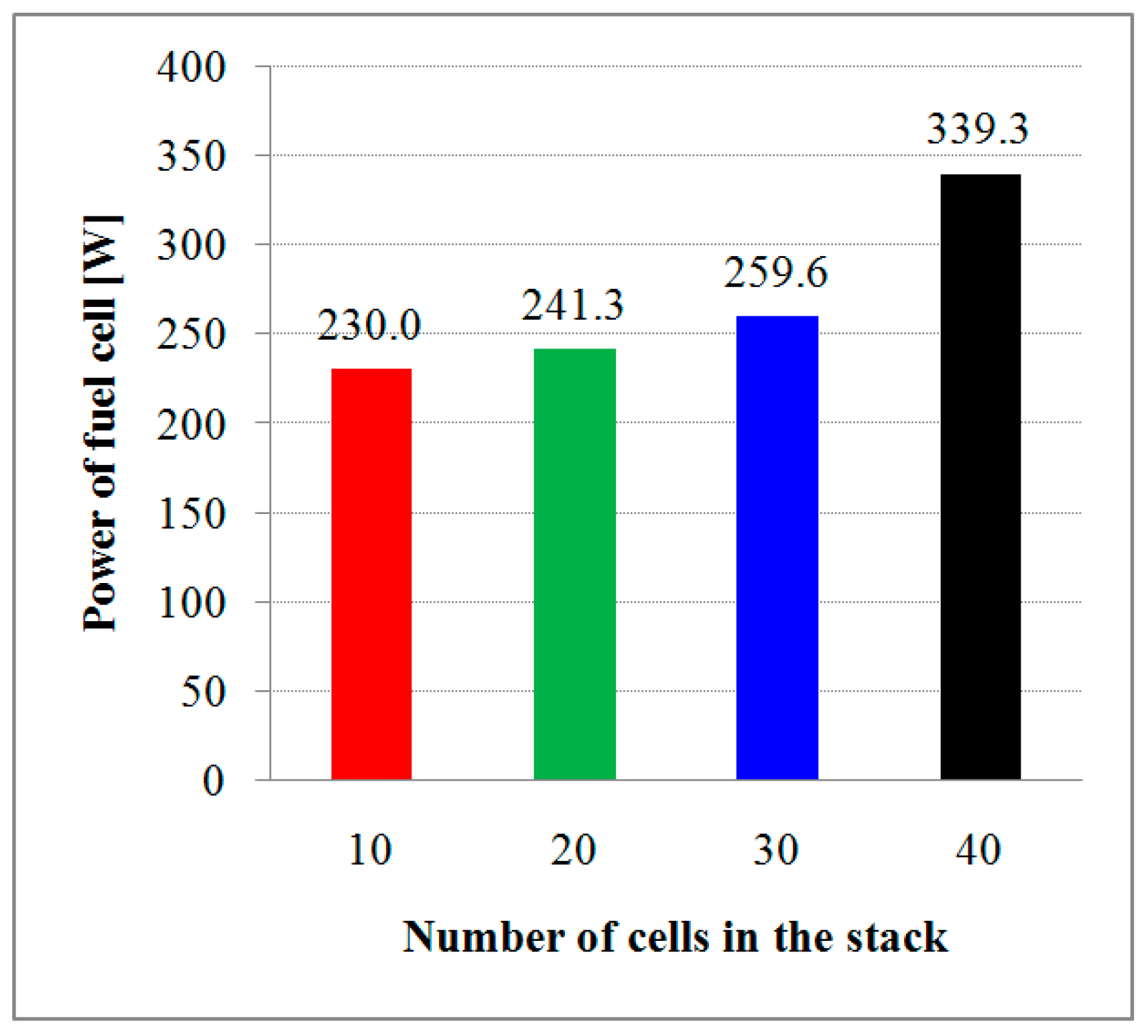
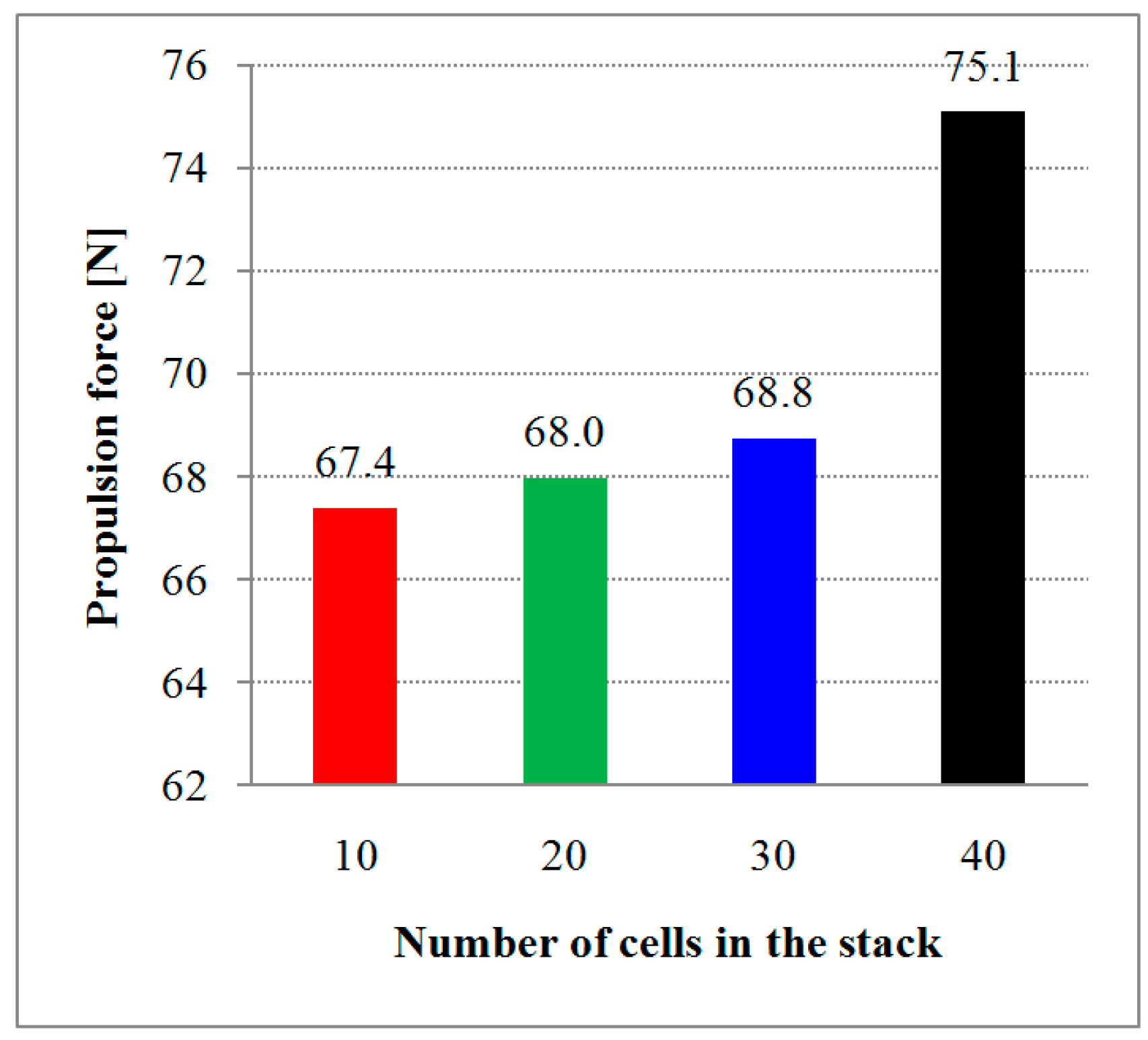
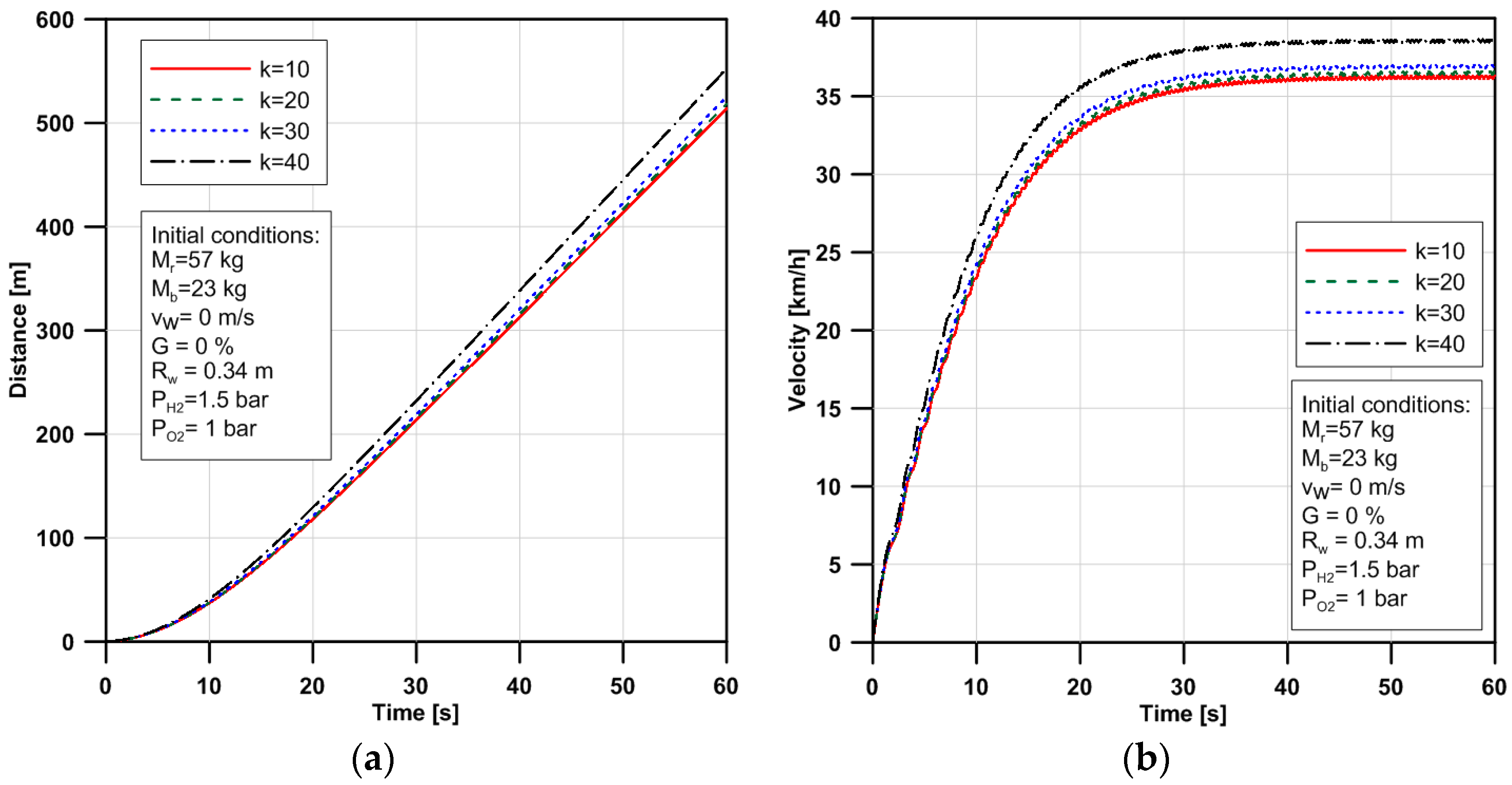
3.2. Effects of Number of Cells in the Stack
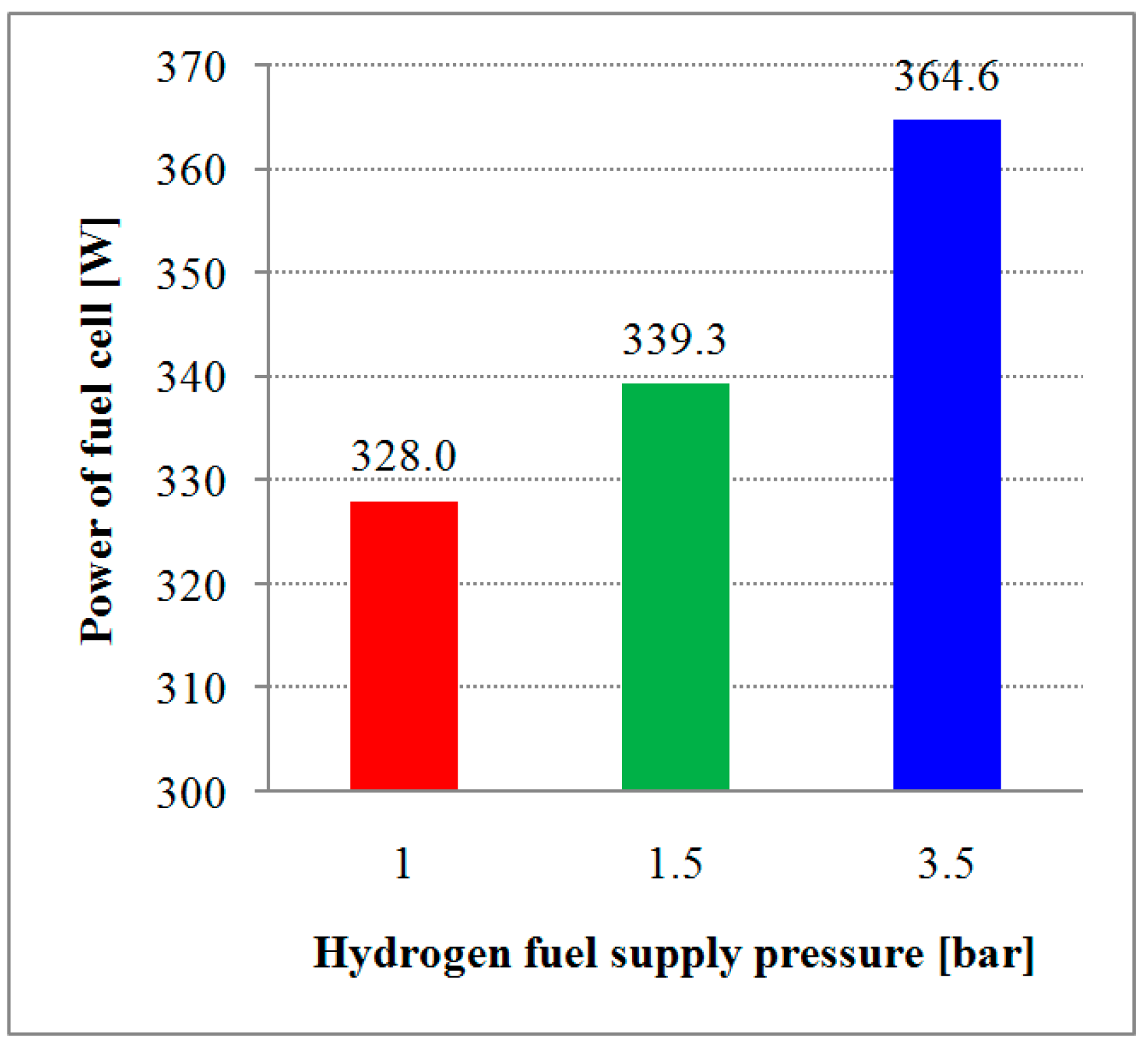
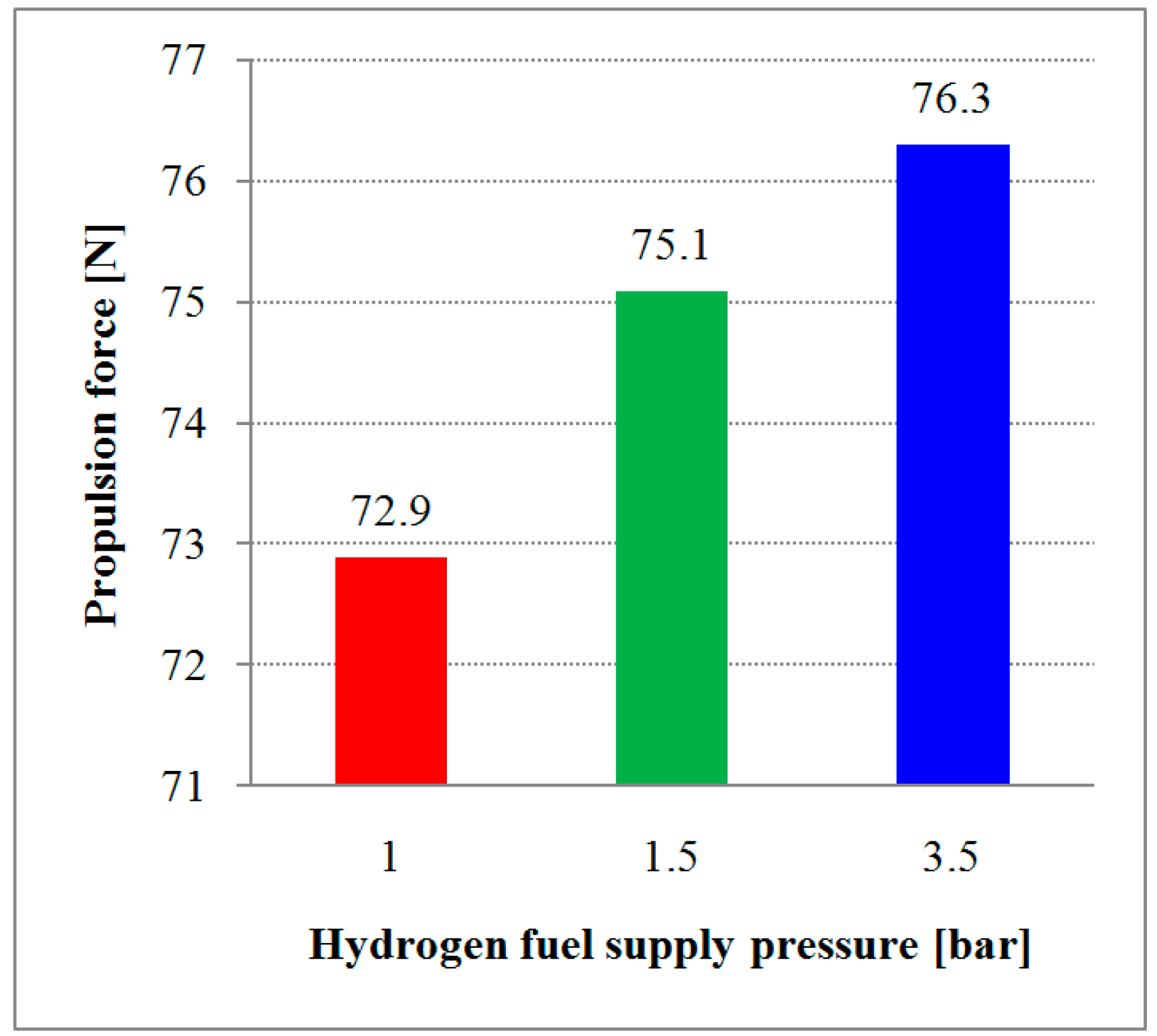
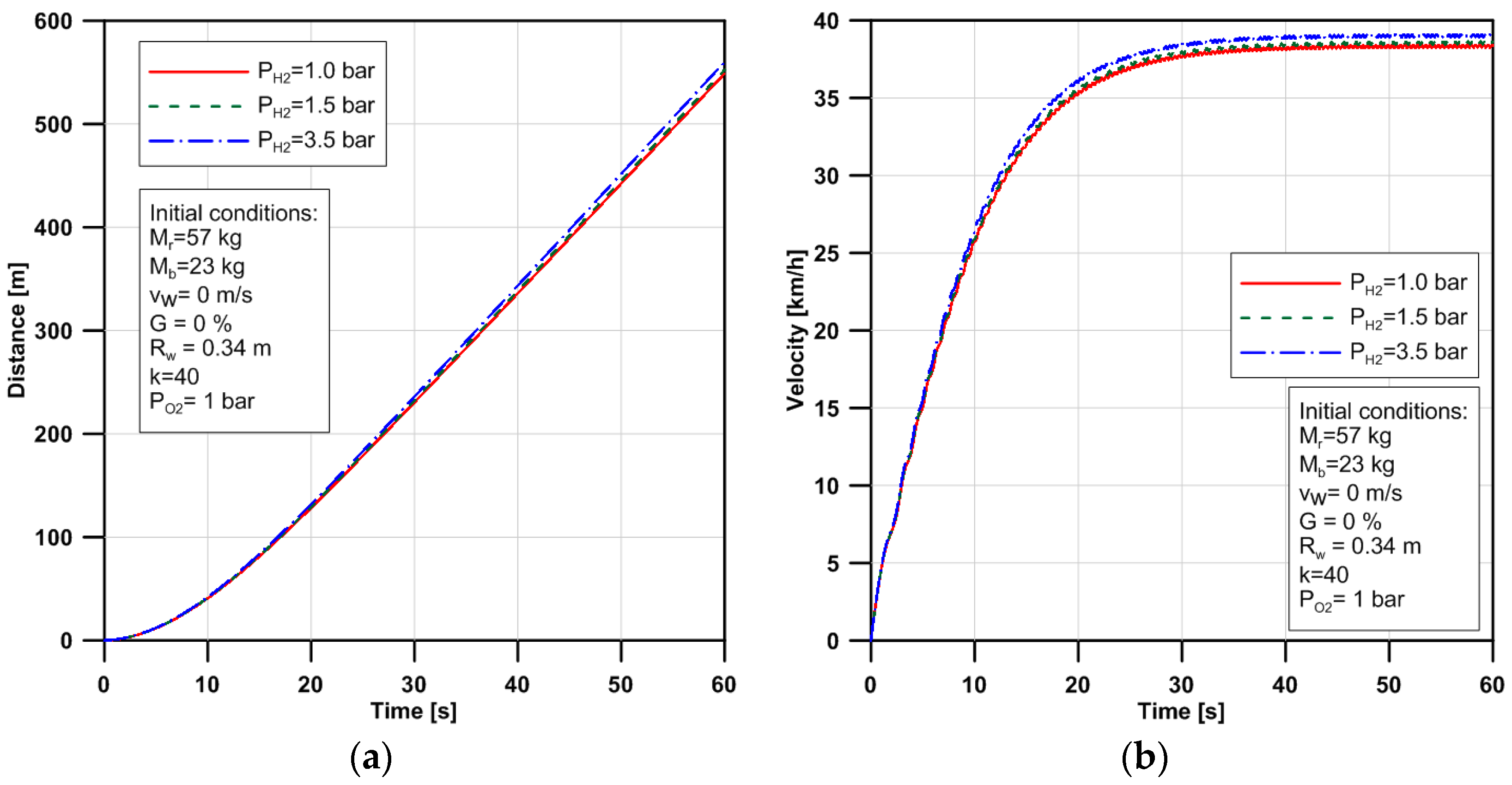
3.3. Effects of Hydrogen Fuel Supply Pressure
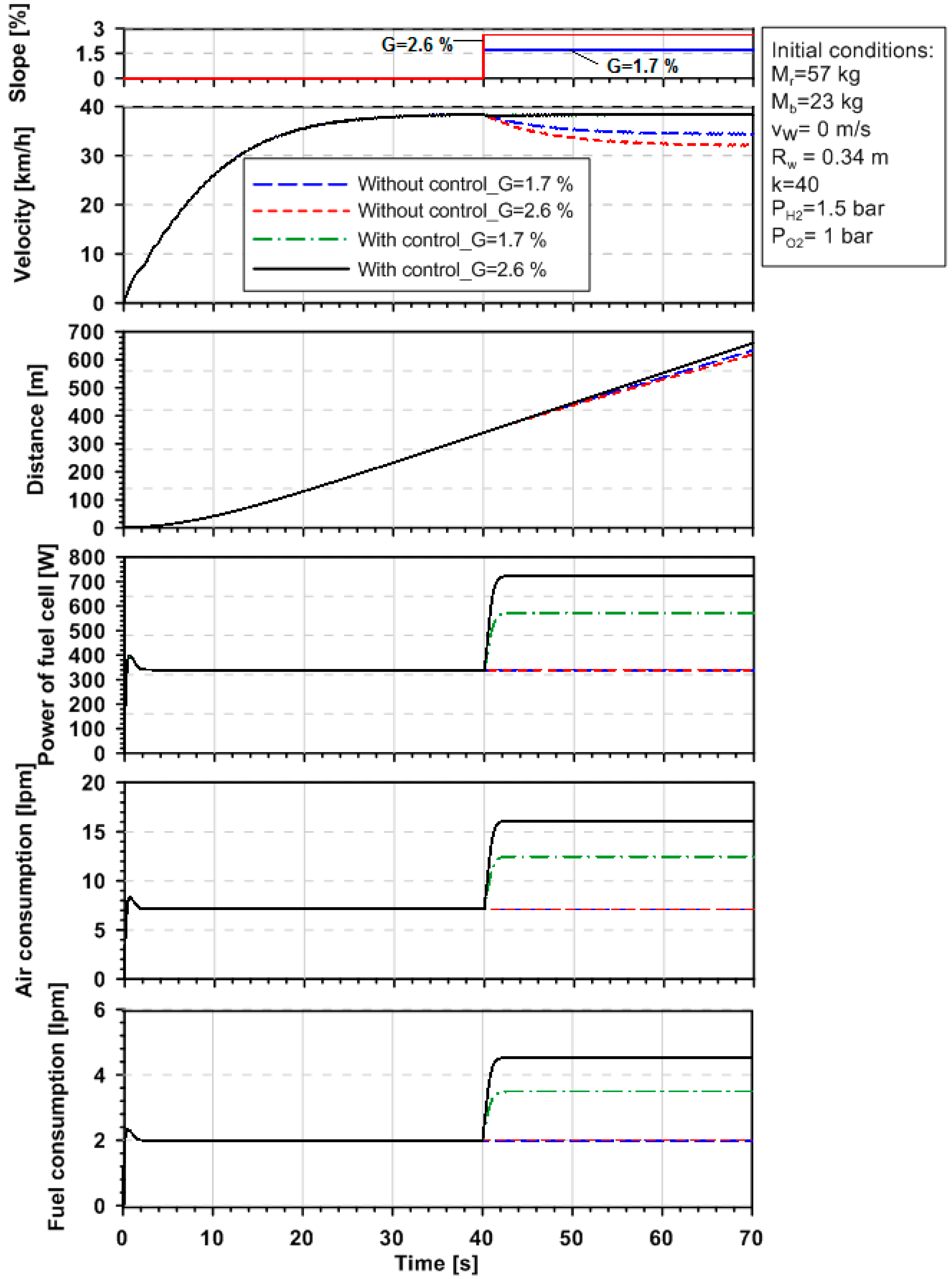
3.4. Effects of Slope Grade
4. Conclusions
- (1)
- Operating performance of the PAB was significantly improved by increasing the number of cells in the stack.
- (2)
- The increase in hydrogen fuel pressure also contributed to improving the operating performance of the PAB; however, this contribution was not significant.
- (3)
- Fuel cell power and propulsion force of the PAB obtained the highest values of 364.6 W and 76.3 N, respectively, when the number of cells and hydrogen fuel pressure were optimized at 40 and 3.5 bar, respectively.
- (4)
- In the case of controlling the fuel cell to maintain a stable velocity of the PAB, the power of fuel cell was increased from 339.2 to 571.2 and 722 W, when slope grade was increased from 0% to 1.7% and 2.6%, respectively.
- (5)
- Air and fuel consumption in the stack of fuel cell was also significantly increased along with the increase in fuel cell power.
Author Contributions
Funding
Conflicts of Interest
References
- Kim, E.S.; Heo, E.N. Key Drivers behind the Adoption of Electric Vehicle in Korea: An Analysis of the Revealed Preferences. Sustainability 2019, 11, 6854. [Google Scholar] [CrossRef] [Green Version]
- Yang, Y.; Tan, Z. Investigating the Influence of Consumer Behavior and Governmental Policy on the Diffusion of Electric Vehicles in Beijing, China. Sustainability 2019, 11, 6967. [Google Scholar] [CrossRef] [Green Version]
- Wolf, S.; Korzynietz, R. Innovation Needs for the Integration of Electric Vehicles into the Energy System. World Electr. Veh. J. 2019, 10, 76. [Google Scholar] [CrossRef] [Green Version]
- Kihm, A.; Trommer, S. The new car market for electric vehicles and the potential for fuel substitution. Energy Policy 2014, 73, 147–157. [Google Scholar] [CrossRef]
- Buekers, J.; Holderbeke, M.V.; Bierkens, J.; Panis, L.I. Health and environmental benefits related to electric vehicle introduction in EU countries. Transp. Res. Part D Transp. Environ. 2014, 33, 26–38. [Google Scholar] [CrossRef]
- Erdelić, T.; Carić, T. A Survey on the Electric Vehicle Routing Problem: Variants and Solution Approaches. J. Adv. Transp. 2019, 2019. [Google Scholar] [CrossRef]
- Moon, H.B.; Park, S.Y.; Jeong, C.; Lee, J. Forecasting electricity demand of electric vehicles by analyzing consumers’ charging patterns. Transp. Res. Part D Transp. Environ. 2018, 62, 64–79. [Google Scholar] [CrossRef]
- Pielecha, J.; Merkisz, J.; Jasinski, R.; Gis, W. Real Driving Emissions Testing of Vehicles Powered by Compressed Natural Gas; SAE Technical Paper; SAE: Warrendale, PA, USA, 2015. [Google Scholar]
- Hung, N.B.; Lim, O. The effects of operating conditions and structural parameters on the dynamic, electric consumption and power generation characteristics of an electric assisted bicycle. Appl. Energy 2019, 247, 285–296. [Google Scholar] [CrossRef]
- Jones, T.; Harms, L.; Heinen, E. Motives, perceptions and experiences of electric bicycle owners and implications for health, wellbeing and mobility. J. Transp. Geogr. 2016, 53, 41–49. [Google Scholar] [CrossRef] [Green Version]
- Langford, B.C.; Cherry, C.R.; Bassett, D.R., Jr.; Fitzhugh, E.C.; Dhakal, N. Comparing physical activity of pedal-assist electric bikes with walking and conventional bicycles. J. Transp. Health 2017, 6, 463–473. [Google Scholar] [CrossRef]
- Bourne, J.E.; Sauchelli, S.; Perry, R.; Page, A.; Leary, S.; England, C.; Cooper, A.R. Health benefits of electrically-assisted cycling: A systematic review. Int. J. Behav. Nutr. Phys. Act. 2018, 15, 116. [Google Scholar] [CrossRef] [PubMed]
- Hung, N.B.; Sung, J.; Lim, O. A simulation and experimental study of operating performance of an electric bicycle integrated with a semi-automatic transmission. Appl. Energy 2018, 221, 319–333. [Google Scholar] [CrossRef]
- Morchin, W.C.; Oman, H. Electric Bicycles—A Guide to Design and Use; Wiley-IEEE Press: Hoboken, NJ, USA, 2006. [Google Scholar]
- Kheirandish, A.; Kazemi, M.S.; Dahari, M. Dynamic performance assessment of the efficiency of fuel cell-powered bicycle: An experimental approach. Int. J. Hydrogen Energy 2014, 39, 13276–13284. [Google Scholar] [CrossRef]
- Hwang, J.J.; Wang, D.Y.; Shih, N.C.; Lai, D.Y.; Chen, C.K. Development of fuel-cell-powered electric bicycle. J. Power Sources 2004, 133, 223–228. [Google Scholar] [CrossRef]
- Cardinali, L.; Santomassimo, S.; Stefanoni, M. Design and realization of a 300 W fuel cell generator on an electric bicycle. J. Power Sources 2002, 106, 384–387. [Google Scholar] [CrossRef]
- Yildiz, A.B. Electrical equivalent circuit based modeling and analysis of direct current motors. Electr. Power Energy Syst. 2012, 43, 1043–1047. [Google Scholar] [CrossRef]
- Ramos-Paja, C.A.; Bordons, C.; Romero, A.; Giral, R.; Salamero, L.M. Minimum Fuel Consumption Strategy for PEM Fuel Cells. IEEE Trans. Ind. Electron. 2009, 56, 685–696. [Google Scholar] [CrossRef]
- O’Dwyer, A. Handbook of PI and PID Controller Tuning Rules; World Scientific: Singapore, 2006; Volume 26, pp. 92–93. [Google Scholar]











{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameters | Values |
|---|---|
| EAB mass, kg | 23 |
| Length of crank, m | 0.175 |
| Radius of wheel, m | 0.34 |
| Number of teeth on front gear | 44 |
| Number of teeth on rear gear | 11 |
| Power of electric motor, W | 250 |
| Parameters | Values |
|---|---|
| Number of cells | 10 ÷ 40 |
| Nominal stack efficiency | 48% |
| Operating temperature, °C | 55 |
| Fuel supply pressure, bar | 1.5 ÷ 3.5 |
| Air supply pressure, bar | 1.0 |
© 2020 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Hung, N.B.; Lim, O. Effects of Design Parameters on Operating Characteristics of an Electric Assisted Bicycle Using Fuel Cell. Sustainability 2020, 12, 4684. https://doi.org/10.3390/su12114684
Hung NB, Lim O. Effects of Design Parameters on Operating Characteristics of an Electric Assisted Bicycle Using Fuel Cell. Sustainability. 2020; 12(11):4684. https://doi.org/10.3390/su12114684
Chicago/Turabian StyleHung, Nguyen Ba, and Ocktaeck Lim. 2020. "Effects of Design Parameters on Operating Characteristics of an Electric Assisted Bicycle Using Fuel Cell" Sustainability 12, no. 11: 4684. https://doi.org/10.3390/su12114684