

Dual-Source Bidirectional Quasi-Z-Source Inverter Development for Off-Road Electric Vehicles



Abstract
:1. Introduction
- It provides a novel control configuration of SC/BAT HESS Bq-ZSI for EV systems.
- It improves the SC/BAT HESS EV in terms of the dynamic performance and the battery lifetime.
2. Hybrid Energy Storage System Configuration and Modeling
3. Finite Control Set Model Predictive Controller
4. Results and Discussion
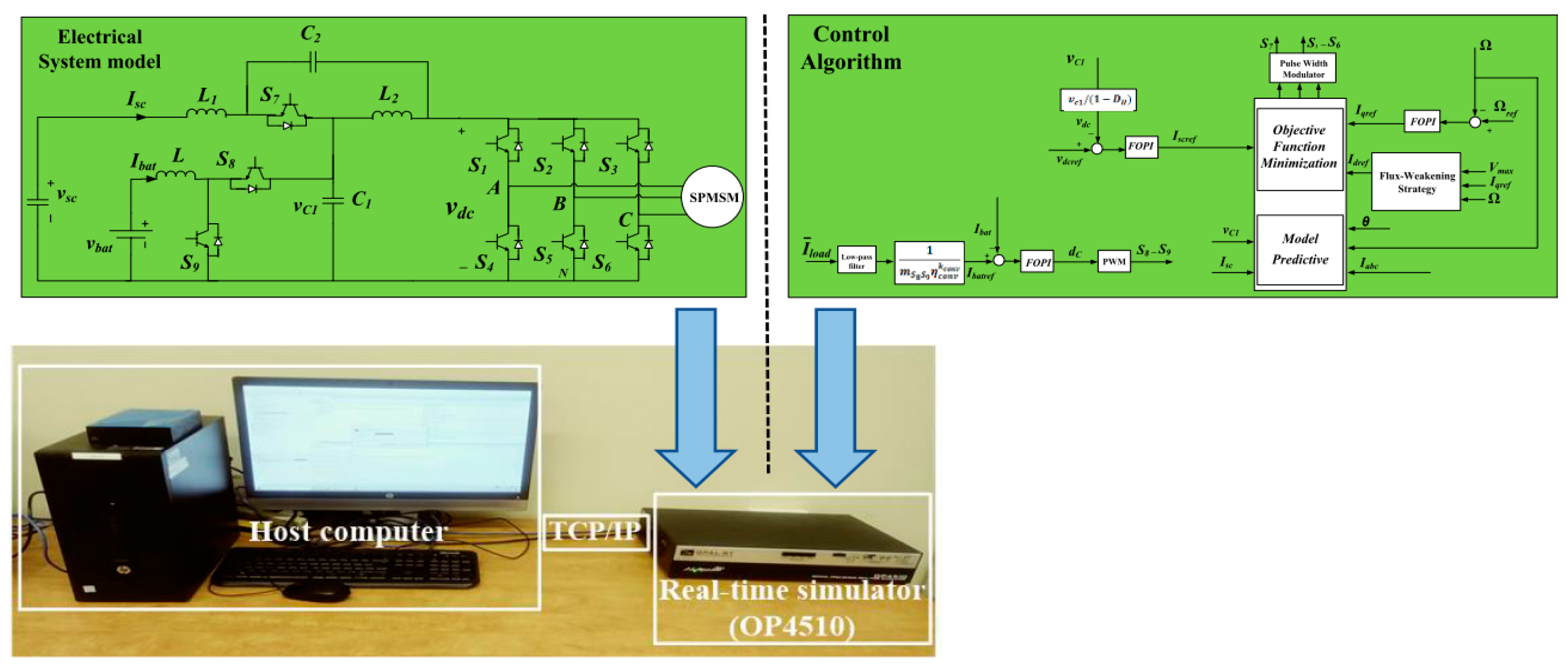
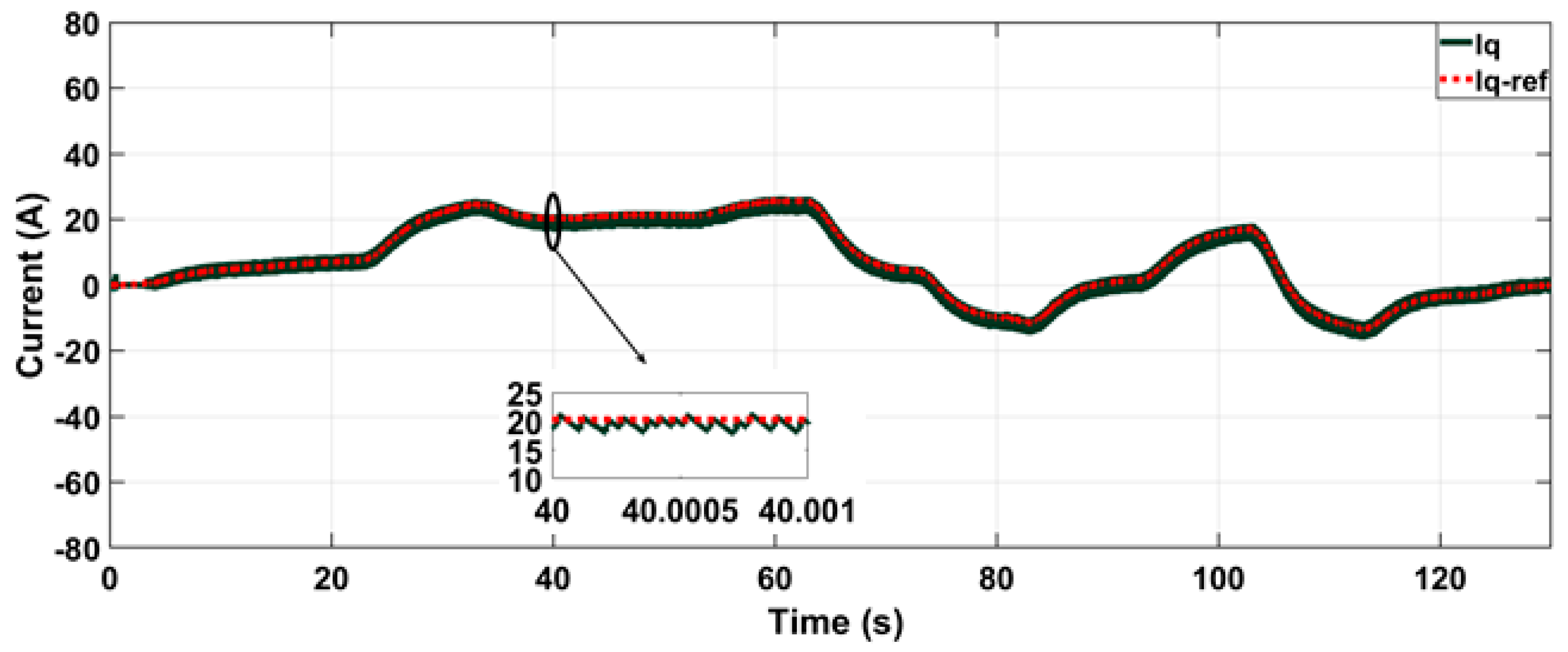
4.1. Real-Time Simulation Results
4.2. Battery Aging Index Comparison
5. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Conflicts of Interest
References
- Chemali, E.; Preindl, M.; Malysz, P.; Emadi, A. Electrochemical and electrostatic energy storage and management systems for electric drive vehicles: State-of-the-Art review and future trends. IEEE J. Emerg. Sel. Top. Power Electron. 2016, 4, 1117–1134. [Google Scholar] [CrossRef]
- Zimmermann, T.; Keil, P.; Hofmann, M.; Horsche, M.F.; Pichlmaier, S.; Jossen, A. Review of system topologies for hybrid electrical energy storage systems. J. Energy Storage 2016, 8, 78–90. [Google Scholar] [CrossRef]
- Hemmati, R.; Saboori, H. Emergence of hybrid energy storage systems in renewable energy and transport applications—A review. Renew. Sustain. Energy Rev. 2016, 65, 11–23. [Google Scholar] [CrossRef]
- Jiya, I.N.; Gurusinghe, N.; Gouws, R. Combination of LiCs and EDLCs with Batteries: A New Paradigm of Hybrid Energy Storage for Application in EVs. World Electr. Veh. J. 2018, 9, 47. [Google Scholar] [CrossRef]
- Chia, Y.Y.; Lee, L.H.; Shafiabady, N.; Isa, D. A load predictive energy management system for supercapacitor-battery hybrid energy storage system in solar application using the Support Vector Machine. Appl. Energy 2015, 137, 588–602. [Google Scholar] [CrossRef]
- Monem, M.A.; Trad, K.; Omar, N.; Hegazy, O.; Mantels, B.; Mulder, G.; van den Bossche, P.; van Mierlo, J. Lithium-ion batteries: Evaluation study of different charging methodologies based on aging process. Appl. Energy 2015, 152, 143–155. [Google Scholar] [CrossRef]
- Sarasketa-Zabala, E.; Gandiaga, I.; Martinez-Laserna, E.; Rodriguez-Martinez, L.M.; Villarreal, I. Cycle ageing analysis of a LiFePO 4 /graphite cell with dynamic model validations: Towards realistic lifetime predictions. J. Power Sources 2015, 275, 573–587. [Google Scholar] [CrossRef]
- Preger, Y.; Barkholtz, H.M.; Fresquez, A.; Campbell, D.L.; Juba, B.W.; Romàn-Kustas, J.; Ferreira, S.R.; Chalamala, B. Degradation of Commercial Lithium-Ion Cells as a Function of Chemistry and Cycling Conditions. J. Electrochem. Soc. 2020, 167, 120532. [Google Scholar] [CrossRef]
- Gomozov, O.; Trovão, J.P.F.; Kestelyn, X.; Dubois, M.R. Adaptive Energy Management System Based on a Real-Time Model Predictive Control with Nonuniform Sampling Time for Multiple Energy Storage Electric Vehicle. IEEE Trans. Veh. Technol. 2016, 66, 5520–5530. [Google Scholar] [CrossRef]
- Kuperman, A.; Aharon, I.; Malki, S.; Kara, A. Design of a Semiactive Battery-Ultracapacitor Hybrid Energy Source. IEEE Trans. Power Electron. 2012, 28, 806–815. [Google Scholar] [CrossRef]
- Chemali, E.; McCurlie, L.; Howey, B.; Stiene, T.; Rahman, M.M.; Preindl, M.; Ahmed, R.; Emadi, A. Minimizing battery wear in a hybrid energy storage system using a linear quadratic regulator. In Proceedings of the IECON 2015—41st Annual Conference of the IEEE Industrial Electronics Society, Yokohama, Japan, 9–12 November 2015. [Google Scholar]
- Siwakoti; Peng, F.; Blaabjerg, F. Impedance-source networks for electric power conversion part I: A topological review. IEEE Trans. Power Electron. 2015, 30, 699–716. [Google Scholar] [CrossRef]
- Ellabban, O.; Abu-Rub, H. Z-source inverter: Topology improvements review. IEEE Ind. Electron. Mag. 2016, 10, 6–24. [Google Scholar] [CrossRef]
- Liu, Y.; Ge, B.; Ferreira, F.J.T.E.; de Almeida, A.T.; Rub, A.A. Modelling and SVPWM control of quasi-Z-source inverter. In Proceedings of the 11th International Conference on Electrical Power Quality and Utilisation, Lisbon, Portugal, 17–19 October 2011. [Google Scholar]
- Jung, J.; Keyhani, A. Control of a Fuel Cell Based Z-Source Converter. IEEE Trans. Energy Convers. 2007, 22, 467–476. [Google Scholar] [CrossRef]
- Shen, M.; Joseph, A.; Wang, J.; Peng, F.Z.; Adams, D.J. Comparison of traditional inverters and Z-source inverter for fuel cell vehicles. IEEE Trans. Power Electron. 2007, 22, 1453–1463. [Google Scholar] [CrossRef]
- Hu, S.; Liang, Z.; He, X. Ultracapacitor-Battery Hybrid Energy Storage System Based on the Asymmetric Bidirectional Z-Source Topology for EV. IEEE Trans. Power Electron. 2015, 31, 7489–7498. [Google Scholar] [CrossRef]
- Aljanad, A.; Mohamed, A.; Khatib, T.; Ayob, A.; Shareef, H. A Novel Charging and Discharging Algorithm of Plug-in Hybrid Electric Vehicles Considering Vehicle-to-Grid and Photovoltaic Generation. World Electr. Veh. J. 2019, 10, 61. [Google Scholar] [CrossRef]
- Wang, G.; Ciobotaru, M.; Agelidis, V.G. Power Smoothing of Large Solar PV Plant Using Hybrid Energy Storage. IEEE Trans. Sustain. Energy 2014, 5, 834–842. [Google Scholar] [CrossRef]
- Chong, L.W.; Wong, Y.W.; Rajkumar, R.K.; Rajkumar, R.K.; Isa, D. Hybrid energy storage systems and control strategies for stand-alone renewable energy power systems. Renew. Sustain. Energy Rev. 2016, 66, 174–189. [Google Scholar] [CrossRef]
- Yu, J.; Jiang, F.; Kong, W.; Luo, Y. A Distributed and Hierarchical Optimal Control Method for Intelligent Connected Vehicles in Multi-Intersection Road Networks. World Electr. Veh. J. 2022, 13, 34. [Google Scholar] [CrossRef]
- Ort´uzar, M.; Moreno, J.; Dixon, J. Ultracapacitor-based auxiliary energy system for an electric vehicle: Implementation and evaluation. IEEE Trans. Ind. Electron. 2007, 54, 2147–2156. [Google Scholar] [CrossRef]
- Wang, P.; Xiao, J.; Setyawan, L. Hierarchical Control of Hybrid Energy Storage System in DC Microgrids. IEEE Trans. Ind. Electron. 2015, 62, 4915–4924. [Google Scholar] [CrossRef]
- Nosrati, K.; Mansouri, H.R.; Saboori, H. Fractional-order PID controller design of frequency deviation in a hybrid renewable energy generation and storage system. CIRED-Open Access Proc. J. 2017, 2017, 1148–1152. [Google Scholar] [CrossRef]
- Yaramasu, V.; Wu, B.; Rivera, M.; Rodriguez, J. Enhanced model predictive voltage control of four-leg inverters with switching frequency reduction for standalone power systems. In Proceedings of the 2012 15th International Power Electronics and Motion Control Conference (EPE/PEMC), Novi Sad, Serbia, 4–6 September 2012. [Google Scholar]
- Choi, D.K.; Lee, K.B. Dynamic Performance Improvement of AC/DC Converter Using Model Predictive Direct Power Control With Finite Control Set. IEEE Trans. Ind. Electron. 2014, 62, 757–767. [Google Scholar] [CrossRef]
- Murali, A.; Wahab, R.S.; Gade, C.S.R.; Annamalai, C.; Subramaniam, U. Assessing Finite Control Set Model Predictive Speed Controlled PMSM Performance for Deployment in Electric Vehicles. World Electr. Veh. J. 2021, 12, 41. [Google Scholar] [CrossRef]
- Mendez, R.; Sbarbaro, D.; Espinoza, J.; Rojas, C. Finite Control Set Model Predictive Control Assisted by a Linear Controller for True Parameter Uncertainty Compensation. In Proceedings of the 2017 IEEE Energy Conversion Congress and Exposition (ECCE), Cincinnati, OH, USA, 1–5 October 2017; pp. 4964–4970. [Google Scholar]
- Bakeer, A.; Ismeil, M.A.; Orabi, M. A powerful finite control set-model predictive control algorithm for quasi z-source inverter. IEEE Trans. Ind. Inform. 2016, 12, 1371–1379. [Google Scholar] [CrossRef]
- Mande, D.; Blondin, M.; Trovão, J.P.F. Optimisation of fractional-order PI controller for bidirectional quasi-Z-source inverter used for electric traction system. IET Electr. Syst. Transp. 2020, 10, 376–384. [Google Scholar] [CrossRef]
- Mande, D.; Trovão, J.P.; Rubio, R.G.; Ta, M.C. Comparison of Bidirectional Quasi Z-Source Inverter and Bidirectional Conventional Two-Stage Inverter for Electric Traction System. In Proceedings of the 2018 IEEE Vehicle Power and Propulsion Conference (VPPC), Chicago, IL, USA, 27–30 August 2018. [Google Scholar]
- Dehghan, S.M.; Mohamadian, M.; Yazdian, A. Hybrid electric vehicle based on bidirectional Z-source nine-switch inverter. IEEE Trans. Veh. Technol. 2010, 59, 2641–2653. [Google Scholar] [CrossRef]
- Peng, F.Z.; Shen, M.; Holland, K. Application of Z-source inverter for traction drive of fuel cell—Battery hybrid electric vehicles. IEEE Trans. Power Electron. 2007, 22, 1054–1061. [Google Scholar] [CrossRef]
- Cortes, P.; Ortiz, G.; Yuz, J.I.; Rodriguez, J.; Vazquez, S.; Franquelo, L.G. Model predictive control of an inverter with output LC filter for UPS applications. IEEE Trans. Power Electron. 2009, 56, 1875–1883. [Google Scholar] [CrossRef]
- Sepulchre, L.; Fadel, M.; Pietrzak-David, M.; Porte, G. Flux-weakening strategy for high speed PMSM for vehicle application. In Proceedings of the 2016 International Conference on Electrical Systems for Aircraft, Railway, Ship Propulsion and Road Vehicles & International Transportation Electrification Conference (ESARS-ITEC), Toulouse, France, 2–4 November 2016. [Google Scholar]
- Liu, Y.; Abu-Rub, H.; Xue, Y.; Tao, F. A Discrete-Time Average Model-Based Predictive Control for a Quasi-Z-Source Inverter. IEEE Trans. Ind. Electron. 2018, 65, 6044–6054. [Google Scholar] [CrossRef]
- Thounthong, P.; Rael, S. The benefits of hybridization. IEEE Ind. Electron. Mag. 2009, 3, 25–37. [Google Scholar] [CrossRef]
- Song, Z.; Hofmann, H.; Li, J.; Hou, J.; Han, X.; Ouyang, M. Energy management strategies comparison for electric vehicles with hybrid energy storage system. Appl. Energy 2014, 134, 321–331. [Google Scholar] [CrossRef]
- Goussian, A.; LeBel, F.-A.; Trovão, J.P.; Boulon, L. Passive hybrid energy storage system based on lithium-ion capacitor for an electric motorcycle. J. Energy Storage 2019, 25, 100884. [Google Scholar] [CrossRef]

















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Supercapacitor | Battery | Motor | |
|---|---|---|---|
| Mode 1 | Null | ||
| Mode 2 | Null | ||
| Mode 3 | |||
| Mode 4 | |||
| Mode 5 | |||
| Mode 6 | |||
| Mode 7 | |||
| Mode 8 |
| Parameters | Variable Name | Values |
|---|---|---|
| Vehicle (e-Commander) | ||
| Total mass of the EV | ||
| Aerodynamic standard | 1.3 | |
| Rolling coefficient | 0.035 | |
| Air density (at 20 °C) | ||
| Motor-to-wheel-transmission ratio | 20.5 | |
| Efficiency of the transmission | 0.87 | |
| Wheel radius | 0.3175 m | |
| Parameters of SPMSM | ||
| Phase inductance | 1 mH | |
| Phase resistance | 0.08 Ω | |
| Number of pole pairs | np | 2 |
| Global inertia referred to the rotor | J | 1 kg.m2 |
| Equivalent magnetic flux linkage | 0.1 Wb | |
| Rated power | 15 kW | |
| Parameters of original configuration | ||
| Inductance | L | |
| Capacitance | C | 4.5 mF |
| Switching frequency | Fs | 10 kHz |
| Parameters of multi-source Bq-ZSI parameters | ||
| Inductance | L1, L2 | 660 μH |
| Inductance | L | 2.72 mH |
| Capacitance | C1 | 4.9 mF |
| Capacitance | C2 | 8.9 mF |
| Cut-off frequency of LPF | 40 mHz | |
| Switching frequency | Fs | 10 kHz |
| Batteries (Lithium-ion LG Chem ICR2 cell) | ||
| Cell capacitance | 2500 mAh | |
| Cell maximum voltage | 4.2 V | |
| Number of cells in series | 12 | |
| Number of branches in parallel | 48 | |
| Supercapacitor (Maxwell BMOD0058 E016 B02) | ||
| Rated capacitance | 58 F | |
| Nominal voltage | 16 V | |
| Number of series capacitors | 4 | |
| Number of parallels capacitors | 4 | |
| Internal resistance | ||
| Parameters | |||||||||
|---|---|---|---|---|---|---|---|---|---|
| FOPI Structure | Motor Speed | Battery Current | DC-Link Voltage | ||||||
| Value | 0.2086 | 3.4246 | 0.1000 | 0.1075 | 15.9137 | 0.7500 | 0.0231 | 22.9688 | 0.7000 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Mande, D.; Trovão, J.P.F.; Ta, M.C.; Do, T.V. Dual-Source Bidirectional Quasi-Z-Source Inverter Development for Off-Road Electric Vehicles. World Electr. Veh. J. 2022, 13, 174. https://doi.org/10.3390/wevj13090174
Mande D, Trovão JPF, Ta MC, Do TV. Dual-Source Bidirectional Quasi-Z-Source Inverter Development for Off-Road Electric Vehicles. World Electric Vehicle Journal. 2022; 13(9):174. https://doi.org/10.3390/wevj13090174
Chicago/Turabian StyleMande, Daouda, João Pedro F. Trovão, Minh C. Ta, and Thang Van Do. 2022. "Dual-Source Bidirectional Quasi-Z-Source Inverter Development for Off-Road Electric Vehicles" World Electric Vehicle Journal 13, no. 9: 174. https://doi.org/10.3390/wevj13090174