1. Introduction
Electric vehicle sales are increasing steadily worldwide by 40% each year [
1], while the number of cars with advanced warranty periods is increasing accordingly. The more electric vehicles are sold, the higher the repercussion of maintenance activities under warranty is for electric vehicle manufacturers. Inappropriate management of the warranty could lead to systematic replacement of the battery systems under warranty, which will end into undesired additional costs for the manufacturer. Consequently, many efforts are spent on this regard, specially on implementing a maintenance methodology (reactive, preventive and predictive) that better fits the needs of each original equipment manufacturer (OEM).
The simplest maintenance is reactive maintenance [
2]. It consists of scheduling fixed maintenance activities and only acting in the case of vehicle failure. Therefore, interventions out of the scheduled plan would only be carried out if there is already a component that requires reparation. These interventions are scheduled immediately after failure notification (already broken). The most relevant features of reactive maintenance are the date of the beginning of life and the dates of scheduled maintenance events.
Nowadays, the most common maintenance is preventive maintenance [
3]. It consists of diagnosing the actual state of the vehicle and acting once some damage thresholds are overcome. Maintenance activities are scheduled based on the state of the vehicle itself. Interventions are scheduled before the occurrence of a failure, but after a certain level of damage is reached. The interventions are scheduled in a short time period after receiving the notification (with serious damage but still working). The most relevant features are the warning thresholds of health indicator(s) and the observed/estimated state of health (SOH).
The maintenance with the highest interest from specialized enterprises is the predictive maintenance [
4]. It consists of predicting failure before any real damage is inflicted. The evolution of health indicators of different elements of the vehicle are observed from the beginning of life. Recorded data are recurrently analyzed using aging models [
5] and prognosis algorithms [
6,
7,
8]. The results from those analyses are used to foresee and prevent failures in early states of damage. Hence, interventions can be scheduled before the occurrence of any failure and before observing any significant damage. Such interventions are scheduled in a long time period after receiving feedback (without any serious damage). The most relevant features are the expected lifespan (the prior) and the prognosed remaining useful life (RUL).
The actual maintenance schedules of electric vehicles are mostly carried out in a mix of reactive and preventive ways or in a mix of reactive, preventive and predictive ways. Maintenance activities of critical components such as the battery system are performed in a preventive or predictive way, while the remaining noncritical components are carried out in a reactive way. Consequently, the maintenance scheduling of electric vehicles must deal with a multicomponent, multimaintenance methodology scenario.
This scientific contribution tackles the need of easing such a multimaintenance methodology scenario through the study of the most critical element of an electric vehicle, the battery system. This study proposes a new qualitative metastate named the state of warranty (SOW). The SOW synthesizes the most relevant quantitative indicators (substates) of each of the maintenance methodologies in one merit. It allows for the simplification of the multimaintenance methodology into a global and unique maintenance methodology. Additionally, this SOW provides a milestone to develop a synthesized platform for multicomponent maintenance (a synthesized SOW of the electric vehicle determined by the estimated SOW of each of the components).
The paper is structured as follows. The proposal is explained in detail in
Section 2. Then, the different tools required to determine the value of each of the quantitative indicators or substates used to estimate the SOW are described in
Section 3: the SOH estimator, the prior and the RUL prognosis. After that, the results are shown and discussed in
Section 4. Finally, the conclusions are drawn in
Section 5.
2. State of Warranty
The needs of electric vehicle manufacturers to plan maintenance activities under the warranty period has motivated the development of a new state estimator: the state of warranty (SOW). The SOW is an off-board state that determines the warranty fulfillment level. This state provides a global understandable insight of the warranty state of an evaluated component while providing detailed and complex information about it if required.
The understandable insight is given by qualitatively determining the fulfillment level of the given warranty in a user-friendly color code. The detailed and complex information is given by quantifying in three substates related to the most relevant features of each of the different types of maintenance activities:
The remaining warranty (RW) for the reactive maintenance.
The remaining health (RH) for the preventive maintenance.
The remaining useful warranty (RUW) for the predictive maintenance.
The qualitative value that defines the SOW is calculated with an expert system. This calculus is performed off-board. The rule-based logic applied by the expert system determines the SOW value based on the previously determined quantitative substates: the remaining warranty, the remaining health and the remaining useful warranty. That rule-based logic is disclosed in
Table 1.
2.1. Remaining Warranty (RW)
The remaining warranty is the simplest substate. It is linked to reactive maintenance and refers to the warranty statement itself. It determines how much time of the warranty has been consumed and how much is still available. It is common to see warranties in form of kilometrage or lifespan.
This state aims at providing information about the closeness of the end of the provided warranty.
The value range of this state is defined with 0 and 1. A value equal to 1 represents the beginning of the warranty, i.e., the whole warranty is still available; 0 represents the end of the warranty, i.e., the warranty has been completely consumed.
This paper proposes to have four events of interest that describe this state. Two of those four events—first and fourth—correspond to the beginning and the end of warranty, respectively. Both determine the saturation levels of the proposed state since there is no interest on quantifying this warranty beyond those limits. The other two proposed events—the second and third events—correspond to warranty states where 5% and 1% of the total warranty remain available. These two values light up the advice state and alarm state, respectively.
Once the events are determined, how to fit them inside the 0 to 1 range is defined. For that aim, we proposed to use a first-order linear equation for the whole range.
Additionally, this paper proposes a color for each event, see
Figure 1. The first event (RW = 1), the green color (in RGB logic [0,1,0]), represents the starting point of the warranty. The second event (RW = 0.05), the orange color (in RGB logic [1,0.832,0.212]), notifies that there is only 5% of the total warranty remaining. The third event (RW = 0.01), the red color (n RGB logic [1,0,0.153]), tells us that there is only 1% of the total warranty available. The fourth event (RW = 0), the black color (in RGB logic [0,0,0]), represents the end of the warranty period (all the warranty has already been consumed).
2.2. Remaining Health (RH)
The remaining health is linked with the most common maintenance: the preventive maintenance. It refers to the present SOH and quantifies its deviation from the prior and the closeness with the end of life (EOL). The aging behavior of a system is prone to suffer changes from design to real life. Changes could come from common modifications on the operating conditions (differences between the expected and the real ones), from a deficient description of the expected aging behavior (an inaccurate aging model will give as a result an inaccurate result) or form unexpected use/manipulation of the asset by the end user of the system.
This state has two objectives. Firstly, it places the present SOH in between the expectation and the EOL to rapidly check the SOH in a proper warranty context (the SOH estimation as itself has low information regarding the warranty unless it is placed in a proper context). Secondly, the remaining health shows the closeness to the appearance of a sudden failure (in this study, the EOL) so as to inform the vehicle manufacturer about the need for a preventive maintenance action.
The value range of this state is defined with 0 and 1. The 1 represents that the estimated SOH is equal or higher than the expected one at the present instant, and 0 represents that the EOL has been reached.
This paper proposes to have three events of interest that describe this state. Two of those three events—the first and third events—are the expected SOH (at the present instant) and the EOL, respectively. Both determine the saturation levels of the proposed state since there is no interest on quantifying it beyond those limits. In terms of diagnosis, if the present SOH is above the expected one, it means that the accumulated damage is lower than expected and, therefore, preventive actions are not required. At the same time, if the present SOH is below the EOL, it means that the warranty has not been fulfilled (a failure has already happened).
The second event of interest is the SOH value that triggers the alarms of the closeness of a sudden failure, the SOH threshold that forces preventive maintenance. The value of this second event is the instant when SOH value reaches the EOL plus 3%. This value is assumed to be big enough to give room for actions, but small enough not to light up hasty alarms.
Once the events are defined, the rest of the values of this 0 to 1 range need to be defined. We proposed to use a piecewise-defined function built with first order linear equations; see Equation (1):
where the
is the remaining health at instant
; the
is the estimated SOH at instant
; the
is the prior at instant
; the
is the defined warning SOH threshold (EOL + 3%); the
is the relative difference between the estimated SOH and the expected SOH, having as reference the difference between the expected SOH and the
at instant
; the
is the relative difference between the estimated SOH and the EOL, having as reference the difference between the EOL and the
at instant
; the
and
are the variables of the linear function in between the defined events, being x 1 and 2.
The proposed Equation (1) suffers from incongruency when the
. It is only used from the beginning of life to the instant that the expectation reaches the second event. In this situation, the warranty is about to expire so the expectations are close to the failure threshold (the EOL). The remaining health loses its warning purpose since the prior already warns about it from the beginning of life. As result, the only purpose left for the remaining health is to contextualize the estimated SOH, which is carried out with a modified version of Equation (1), see Equation (2).
where the
is the relative difference between the estimated SOH and the expected SOH having as reference the difference between the expected SOH and the EOL at instant
; the
and
are the variables of the linear function in between the EOL and the expected SOH.
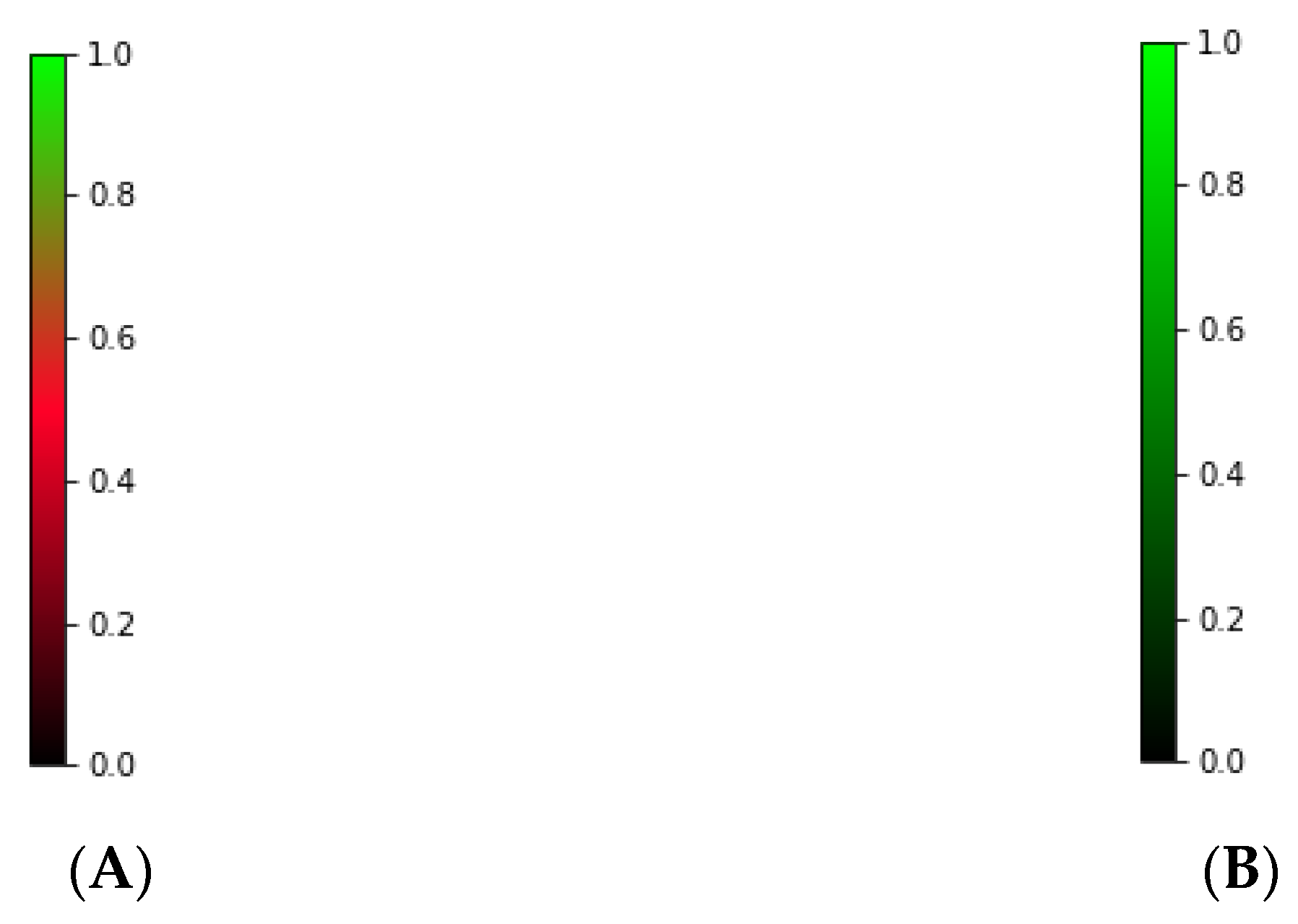
This paper proposes a color for each event; see
Figure 2A. The first event (RH = 1), the green color (in RGB logic [0,1,0]), represents that the estimated SOH is equal to the expected or higher. Everything goes well. The second event (RH = 0.5), the red color (in RGB logic [1,0,0.153]), represents that the EOL event is close (at 3% of SOH). An alert is lighted up and preventive actions are required not to suffer a failure of the vehicle before the warranty period. The third event (RH = 0), the black color (in RGB logic [0,0,0]), represents that the EOL has already been reached before the warranty period.
For the life period that the expected SOH is lower than the one defined at the second event (EOL + 3%), an alternative proposal is made; see
Figure 2B. In this period of the warranty, the second event has no sense (it has already been overcome), and it is taken from the color map. As consequence, the red color disappears and a color map of green and black is left.
2.3. Remaining Useful Warranty (RUW)
The remaining useful warranty is linked with the most interesting maintenance: the predictive maintenance. It requires the future SOH and refers to the remaining warranty from the present to the moment where the EOL threshold is reached; it refers to the RUL. It quantifies the deviations between predicted and expected RUL. It gathers the initial expectations, calculated with the prior and the prognosed value, with the recorded SOH estimations. By comparing expectations and predictions, the remaining useful warranty represents the compliance of the stated warranty on the fulfilment of the application’s operating specifications.
The objective of this state is to inform the vehicle manufacturer about the warranty state way before its nonfulfillment. Thanks to this, the remaining useful warranty gives enough room to the vehicle manufacturer to modify battery operation and achieve the designed warranty in absence of failure.
The value range of this state is defined with 0 and 1, with 1 being the fulfillment of the theoretical expectation and 0 the noncompliance of the warranty in half of the defined warranty period.
This paper proposes to have four events of interest that describe this state. The proposed first event is the theoretical remaining useful life based on the expectations described with 1. This event determines if the expectations are fulfilled or higher. We propose to neglect the states that represent higher compliance levels than those calculated prior since aging behavior is always expected to suffer negative deviations (higher degradation). Therefore, it is not likely to have states beyond this one.
The proposed second event is the RUL defined on the warranty. It usually consists of the value obtained by applying a reductive security margin to the theoretical RUL. Manufacturers used to add a security margin to their prior because of the uncertain level on the real application’s operating conditions. In case it coincides with the theoretical RUL (no security margin is applied), the first and the second events would be the same. Therefore, there would be just one event that represents both the theoretical expectations and the defined warranty.
The proposed third event is the noncompliance of the warranty in 80% of the defined warranty period. It is represented by 0.4. This event tries to represent the state that lights up all the alerts. It becomes mandatory to act in order to correct the deviation suffered on the given warranty.
The proposed last event is the noncompliance of the warranty in half of the defined warranty period. This event defines the border where the battery replacement goes from 1 to 2 in order to keep the warranty. Remaining useful warranty values below this threshold could lead to a catastrophe to the battery manufacturer.
Once the events are defined, the rest of the values of this 0 to 1 range need to be defined. We proposed to use a piecewise-defined function built with first-order linear equations; see Equation (3).
where the RUW
k is the remaining useful warranty at instant
; the
is the predicted lifespan at instant
; the
is the lifespan value related with the event x, being x 1, 2, 3 and 4; the
and
are the variables of the linear function in between the defined events, where x is 1 and 2.
This paper proposes a color for each event; see
Figure 3. The first event (RUW = 1), the green color (in RGB logic [0,1,0]), represents that the predicted lifespan is as the expected or higher. Everything goes well. The second event (RUW = 0.5), the orange color (in RGB logic [1,0.832,0.212]), means that the warranty lifespan and the predicted lifespan are the same. Since slight deviations can incur in the noncompliance of the warranty, a warning is set up. The third event (RUW = 0.4), the red color (n RGB logic [1,0,0.153]), represents that the warranty is not fulfilled 20% earlier than is defined on the warranty. An alert is lighted up. The fourth event (RUW = 0), the black color (in RGB logic [0,0,0]), represents the inflection point where the compliance of the warranty will come from 2 replacements of the whole battery system inside the warranty period. It represents a catastrophe.
3. Required Tools
The SOW estimation can only be performed if some other elements are available along with the SOW estimator. The SOW cannot be estimated unless there is an on-board SOH estimator, the prior data are previously generated and an off-board RUL prognosis is already available.
3.1. SOH Estimator
The SOH is the state of a component that describes its health status. It is commonly used as the unique health indicator due to its level of synthesis. The SOH of a battery system is almost always represented by the relative dischargeable capacity at the present (
) in reference to the nominal capacity (
); see Equation (4):
The SOH estimator of a battery system requires to estimate the dischargeable capacity at the present time instant. It can be directly estimated by undergoing a complete discharge process. Nonetheless, it is not common to undergo a complete discharge periodically in almost any real-life application of an electric vehicle. As consequence, indirect estimation methods are applied.
There are many different options available to conduct an indirect estimation of the dischargeable capacity of a battery system [
9]. One of the most interesting methods consists of estimating the dischargeable capacity from the data generated in partial charges. This study has the advantage of the already integrated SOH estimator in an electric vehicle, see [
10]. The obtained current profile of the partial charge is integrated in small time intervals so as to obtain the derivative profile of the capacity. These data are used along with a previously built model to obtain the SOH estimation.
The obtained on-board SOH estimations are used to directly estimate the remaining health. At the same time, the performed SOH estimations from the beginning of life (BOL) to the present are used to estimate the remaining useful warranty.
3.2. The Prior
The prior, or expectation, refers to the already obtained knowledge about the electric vehicle itself before it starts working; it is the knowledge available at the design phase of the electric vehicle. In this study, there are two different types of prior: the aging evolution and the warranty definition.
The prior related to the aging evolution consists of the data that describe the aging behavior. This knowledge is obtained by predicting the aging behavior at the most probable operating conditions from the BOL to the EOL. For that, there are four features that need to be defined.
Firstly, the most probable operating conditions are speculated. These operating conditions are established based on the application and battery characteristics. These characteristics are the following:
The most probable power profile.
The charge current rates.
The operation limitations (often imposed by the battery management system (BMS)).
The room environmental conditions.
The voltage response of the battery system.
The sizing characteristics of the battery.
Secondly, the EOL is specified. The EOL is an event of interest in the lifespan (in form of years or kilometrage) of the battery that describes the fulfillment of the application’s operational specifications. It is common to use a fixed threshold such as the 80% of the SOH (20% of capacity decay) or the 200% of the ohmic resistance (100% of resistance increase). It is also possible to calculate the EOL based on the operational specifications (application oriented) [
11].
Thirdly, the aging behavior of the battery at the most probable operating conditions is described. This is usually carried out with an aging model. There are many aging models available in the literature [
12,
13]. The accuracy of the model itself will lead to a lower or a higher uncertainty on the actual warranty definition (and more or fewer problems on the given warranty), but all of them are suitable options because they describe the aging behavior, i.e., what this study needs.
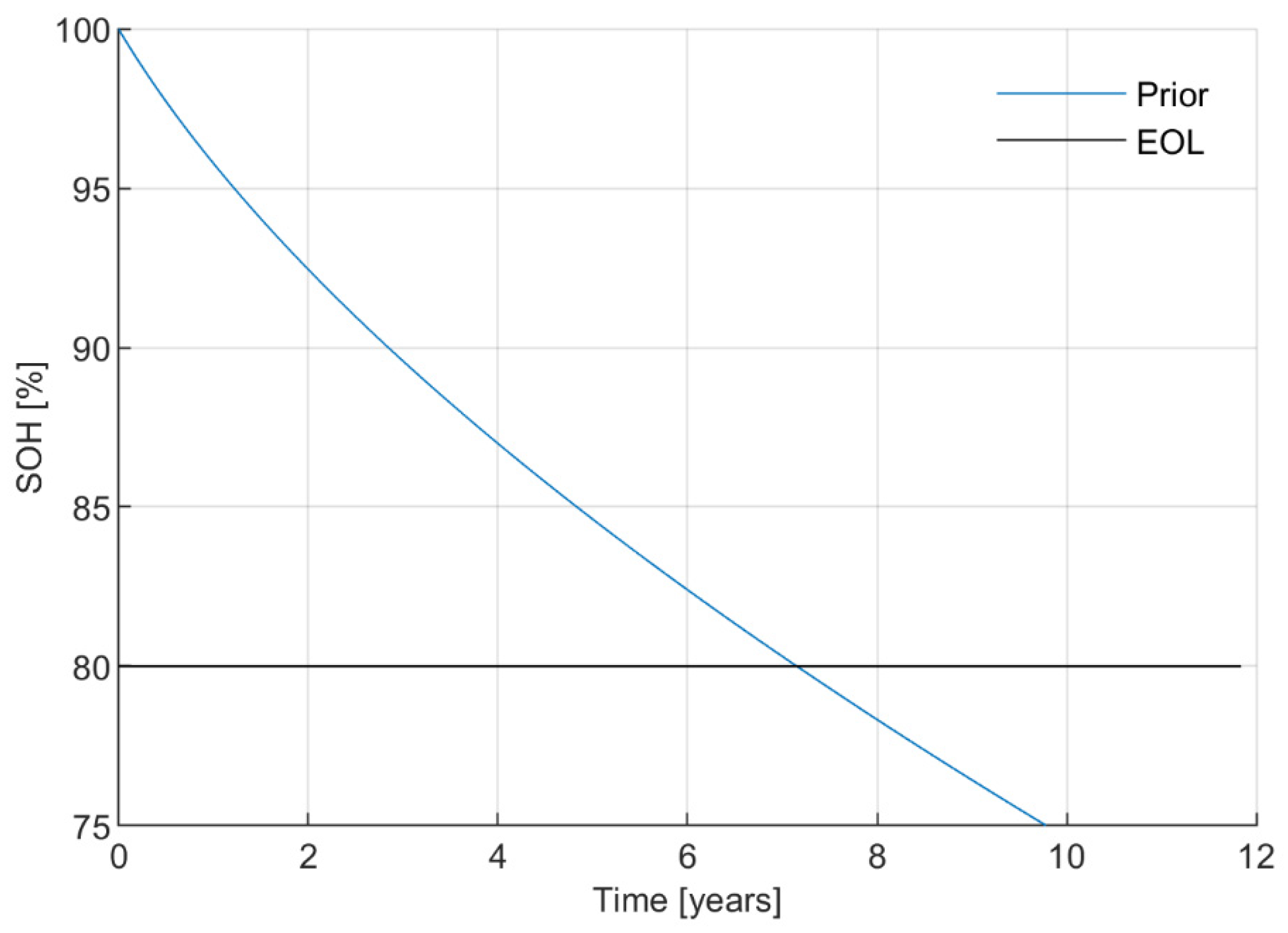
Finally, the SOH evolution from the BOL to the EOL considering the most probable operating conditions is predicted; see an example in
Figure 4.
The prior related with the warranty definition consists of determining the lifespan that covers the warranty in terms of years and kilometrage. The manufacturers usually use the prior of the aging evolution to define these values. The theoretical lifespan is estimated by observing the moment the EOL is reached in the prior (the prior referring to the aging evolution). Then, the warranty lifespan is set up according to the uncertainty level that the calculated theoretical lifespan value has.
The prior knowledge related to the aging behavior is required to estimate the remaining health and remaining useful warranty. The prior knowledge related with the warranty definition, on the other hand, is used on the three substates: on the remaining warranty, on the remaining health and on the remaining useful warranty.
3.3. RUL Prognosis
The RUL represents the time or kilometers for which the electric vehicle can still be operative. The prediction of this merit as well as the uncertainty level on the given prediction, commonly defined as a probability density function (pdf), are fundamental elements on any predictive maintenance. The actions on estimating both (the prediction and its uncertainty) are performed by the prognosis.
Simplifying the RUL prognosis to the extreme, it can be defined as a trend search algorithm that is applied into the recorded SOH estimations. The obtained trend and its uncertainty are propagated until the EOL event in order to calculate the RUL and its uncertainty. The trend search algorithm can integrate prior knowledge of the trend itself (the prior referring the aging evolution) as a bias. This bias of the prognosis activity can greatly reduce the uncertainty on the RUL prediction if the trend underneath the data (the recorded SOH estimations) is similar to the trend on the bias. This study uses the prior that refers to the battery SOH evolution as the bias.
The RUL prognosis requires access to the recorded on-board SOH estimations. This is a must. Without these data, the RUL prognosis cannot be conducted, and therefore, any predictive maintenance is out of the scope. The RUL prognosis requires to have an SOH estimator on-board and a recorded device that provides the tools to have access to these data afterwards off-board.
Once data are accessible, a RUL prognosis algorithm can be applied to these data. There are plenty of different algorithms that can be used to predict the RUL [
14]. The current study profits the already tested and validated prognosis algorithm based on a stochastic particle filter [
7,
8]; see example in
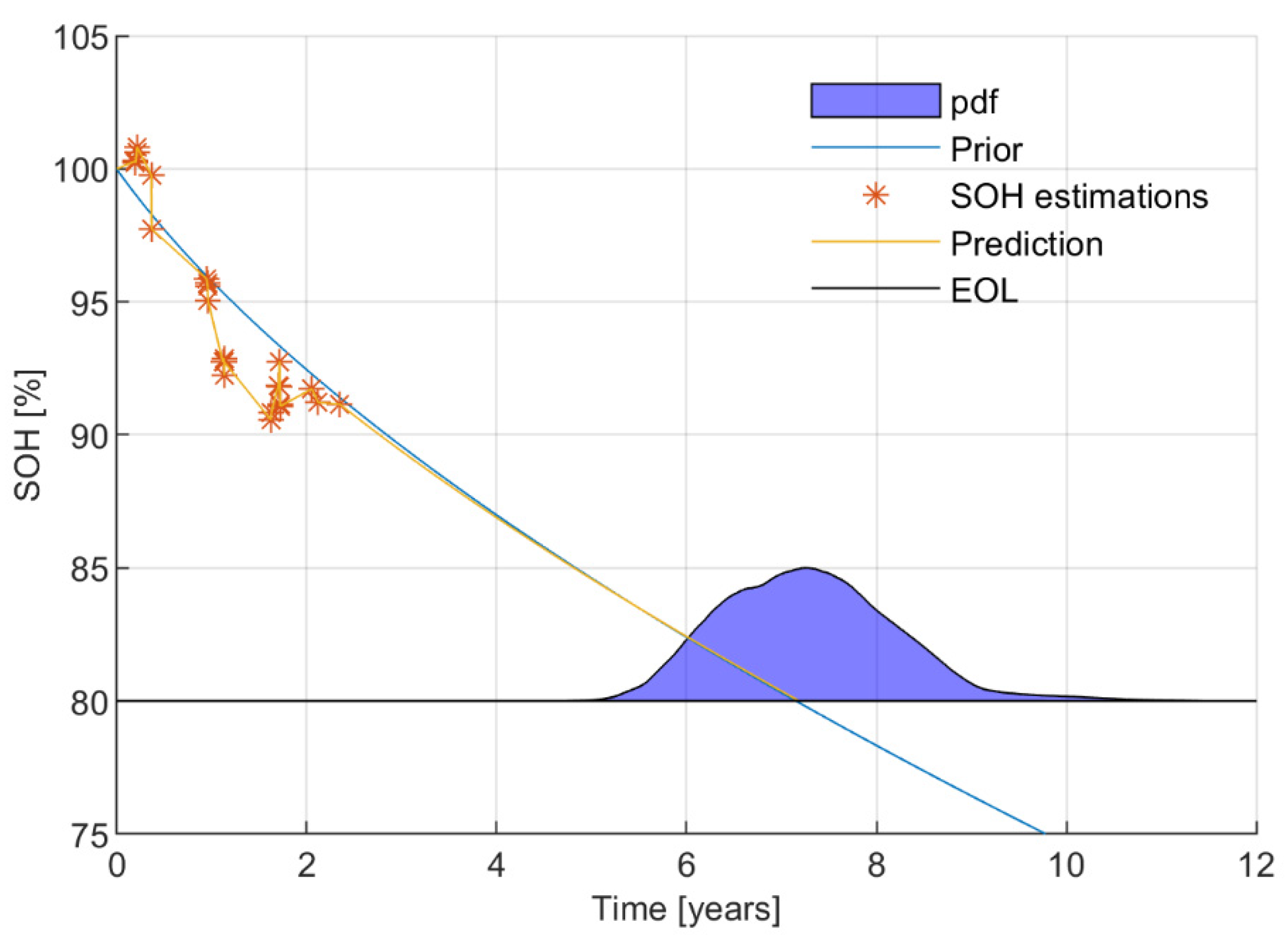
Figure 5.
A stochastic particle filter is based on a Monte Carlo algorithm. It consists of a randomly generated finite number of particles to find the posterior distribution given a noise process and some partial observations. It allows for the filtering of the noise that hides the actual trend underneath the data. Once the trend is obtained and there are no more observations (SOH estimations), the trend and its distribution are propagated until the EOL is reached. As results, the RUL and its pdf are predicted [
7].
The predicted off-board RUL values are used to estimate the remaining useful warranty.
4. Results and Discussion
The SOW estimation proposal has been applied into an artificially built example. Firstly, the example was characterized in order to generate the prior knowledge. The selected battery system was placed on a heavy-duty electric vehicle with a liquid-based thermal management system (the batteries are supposed to operate at 25 °C). This virtual electric vehicle travels a defined route (125 km with a specific orography) on a specified time schedule (320 days per year) during at least a specific lifespan (at least the 10 years of the imposed warranty). As result, the specifications of the operating conditions of the battery system were defined (the maximum required power rates based on the orography, the minimum dischargeable energy at the end of life of the battery and a minimum lifespan). Considering all this, the battery system was sized and the prior knowledge was generated. This virtual battery system was designed in five parts, containing 15 subparts each. The obtained aging evolution of the system under the designed operation conditions gives a lifespan of 12 years as a result (see the prior of
Figure 6).
After the design and sizing activity (and the prior generation), the designed battery system was constructed and operated based on the designed use case (all this was carried out in a virtual way and the data were artificially generated). The operation of the battery system provides on-board SOH estimations. One year of on-board SOH estimations were generated for each subpart; see the measurements of
Figure 6. In order to simplify the example, it was assumed that all subparts have the same SOH evolution versus time.
Once SOH estimations of real operation of the battery were available (in this paper these data were artificially generated), off-board analysis such as the prognosis of the SOH evolution could be carried out. For this paper, a prognosis algorithm based on a particle filter [
7] was developed in Python. The algorithm was applied to the artificially generated SOH estimations and the obtained prior from the sizing activity of the analyzed electric vehicle. The aging evolution from the observed first year onwards was then predicted (the worst case among all the subparts); see PF prediction in
Figure 6. Based on the predicted aging evolution, the final lifespan was predicted to be 10.5 years (a RUL of 9.5 years).
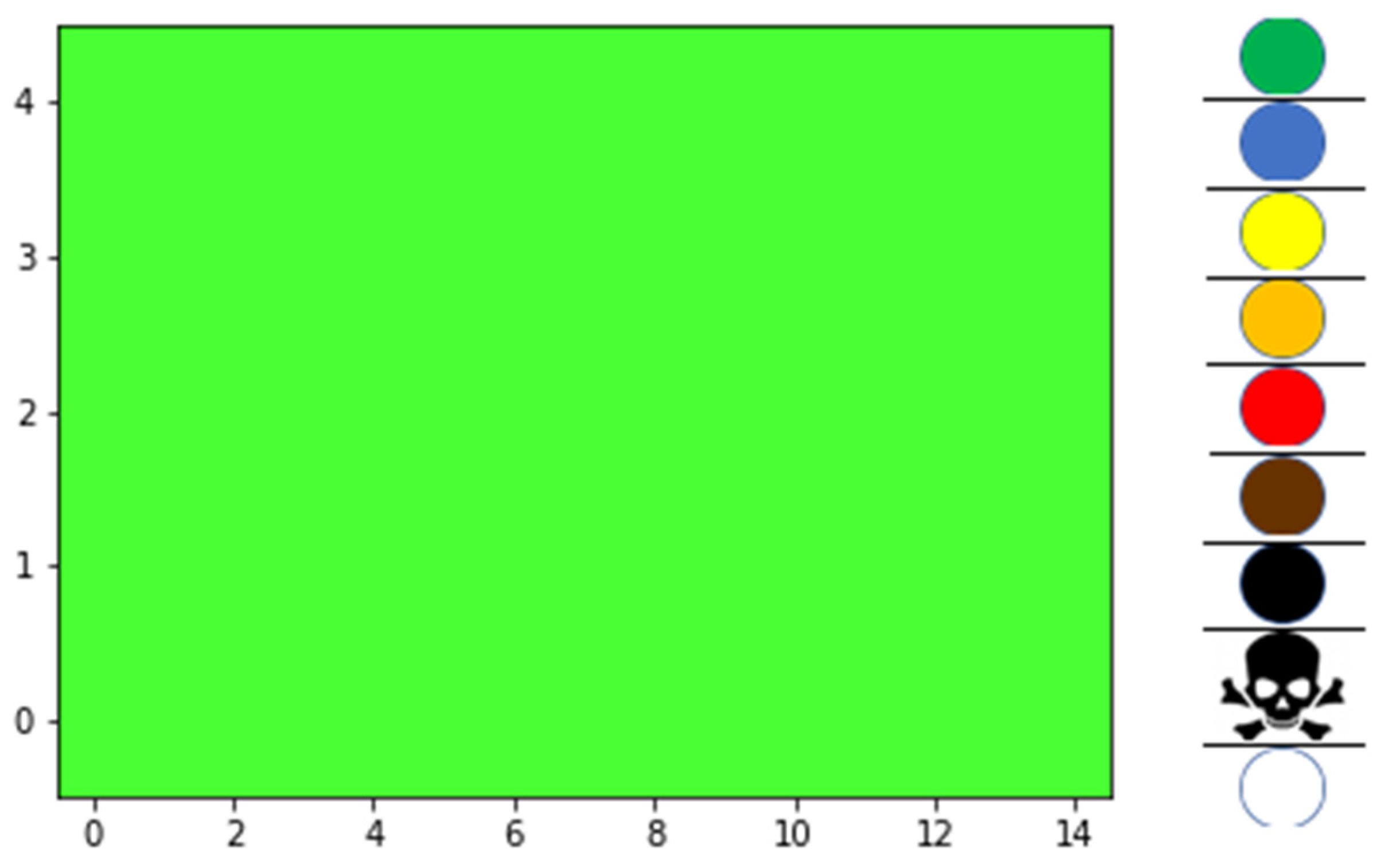
Finally, the proposed approach to estimate the SOW was applied (once the prior knowledge, the SOH estimations and the RUL prognosis were available). The SOW estimation of every subpart was “green”. The results of the estimated SOW are shown in
Figure 7.
The remaining warranty of the battery system after 1 year of operation is 0.9021.
The remaining health of each of the subparts is 0.9840. The SOH values of the different subparts are the same, so the remaining health of each of the subparts is also the same; see
Figure 8 (left).
The remaining useful warranty is shown in
Figure 8 (right). Each subpart has a slightly different value due to the randomness of the applied prognosis algorithm. The obtained remaining useful warranty values go from 0.5153 to 0.5649.
The fact that the SOW is “green” indicates that the warranty goes well. If analyzing the substates in detail, the first thing that stands out is that both the remaining health and remaining warranty are high (above 0.9). The other aspect that stands out is that the remaining useful warranty is not the same for all the subparts as in the rest of the substates, even though the gathered data of each subpart are completely the same. This value changes from subpart to subpart.
Firstly, the remaining warranty is high since it passed just 1 year from the 10 years of operation that the battery system must accomplish. The battery system can be considered almost new, and so is indicated by this substate.
Secondly, the remaining health is high because of two reasons. The first reason is that the estimated SOH is only slightly lower than the expected SOH at the date of the estimations. The last SOH estimation is 97.8% and the expected SOH value at the date that this SOH estimation was performed is 98.2%. There is only 0.4% of difference between the SOH expectation and the SOH estimation. The second reason is that there is still a huge difference between the actual SOH and the EOL. The difference between the estimated SOH and the EOL is 17.8%. The high remaining health indicates that the experienced damage on the batteries is close to the expected one, and that in case predictions were far from optimistic, there would still be room for action.
Thirdly, the remaining useful warranty is not unique for all the subparts because of the characteristics of the applied prognosis algorithm. The particle filter is based on finite random simulations, which lead to slightly different results despite sharing the same data. The obtained remaining useful warranty values between 0.51 and 0.56 indicate that the predictions are worse than the expected one (below 1) but that the predictions still respect the imposed warranty (above 0.5). The results warn about the need to analyze the expectations and the prior. The expected operation conditions could not be the same as the real ones, thus generating a deviation between the estimated SOH and the expected SOH. Another cause could be that the prior of the aging evaluation itself is not correct, which would require an update of the used aging model and to act accordingly in order to fulfill the warranty satisfactorily.
To sum up, the results show that the warranty of 10 years is expected to be fulfilled if everything evolves as it happened during the observed first year. The worst case (the subpart with the lowest predicted lifespan) shows a predicted lifespan of 10.5 years, which is above the imposed warranty of 10 years.
5. Conclusions
This paper has proposed a metastate that qualitatively synthesizes the relevant information about the warranty fulfillment. For that, three substates have been defined and qualitatively quantified: the remaining warranty, the remaining health and the remaining useful warranty. The remaining warranty represents the relative passed time of the warranty with respect to the total warranty. The remaining health represents the relative health with respect to the expectations and EOL. The remaining useful warranty represents the relative RUL with respect to the warranty definition, the expectations and the event where the battery system has to be replaced twice. The qualitative values of these three substates (in a range of 1 to 0) are evaluated by an expert system to determine the SOW, which is represented in a color code.
The applicability of an SOW estimator is totally dependent to the availability of three elements: an on-board SOH estimator (and a way of accessing the generated data with this estimator), a prior definition of the most probable aging evolution (and the most probable lifespan of the system) and an off-board RUL prognosis algorithm. It is not possible to develop a SOW estimator unless these three elements are available. The prior knowledge generates the constrictions to relativize these substates. This is indispensable to obtain qualitative values. The SOH estimations are the health observations themselves. This is necessary to carry out any off-board analysis of the health, and therefore, of the warranty. The RUL prognosis provides the SOH predictions. This is indispensable to properly address the warranty. In this proposal, the uncertainty of the given prediction is neglected. The SOW and the remaining useful warranty are indicators and not final decision-making actions, and therefore, the integration of the uncertainty is considered to be necessary in a decision-making level rather than in a state estimation (diagnosis) level.
The results have shown some strong points of the proposed state. The SOW is able to show in a user-friendly manner if there are reasons to worry in terms of warranty fulfillment. Moreover, its three substates provide enough insight to understand completely how healthy the system is with respect to what it should be, and how different the final lifespan will be with respect to the expected one (and imposed one).
One of the most interesting uses of this state is the planification of maintenance activities. The SOW synthesizes the most relevant features of each of the different maintenance methodologies. Therefore, it can be used as the main indicator for maintenance scheduling and develop an improved predictive maintenance.
Another strong argument in favor of the SOW is the detection of failures and weak points of the system. The tracking of the fulfillment of the warranty provides the chance to apply data analysis, which could lead to detect defect components, errors on prior knowledge, weak points, harmful actuations, etc. To sum up, it can be used as the basis of a continuous improvement process of the system.
Last but not least, the use of SOW provides the basis to determine the optimal use of the batteries. The tracking of the SOW allows the final user to adjust the use conditions of the batteries to fit to their concept of optimal use. The use conditions of the batteries can be brought to the limits of the warranty, optimizing the total income from the batteries on the warranty period, or the use conditions can be modified to maximize the lifespan.
As for the future, we are currently researching the diagnosis assessments that will support the SOW estimator. Those assessments are based on the historic data of the operating conditions, and they will give insight in the reasons behind deviations of the expectations and/or prior knowledge.












{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}








