
Using an Intelligent Control Method for Electric Vehicle Charging in Microgrids



Abstract
:1. Introduction
Literature Review
- (A)
- The proposed method checks the time loop and charging level according to the objectives to reach the desired answer in the objective functions according to the predetermined scenarios.
- (B)
- The proposed method can perform intelligent charging with high safety without increasing the battery’s maximum voltage.
- (C)
- The proposed method designs the charging station with simultaneous consideration of the three goals: maximizing the charging demand every hour of the day and night, improving the network load profile, and minimizing the operation costs.
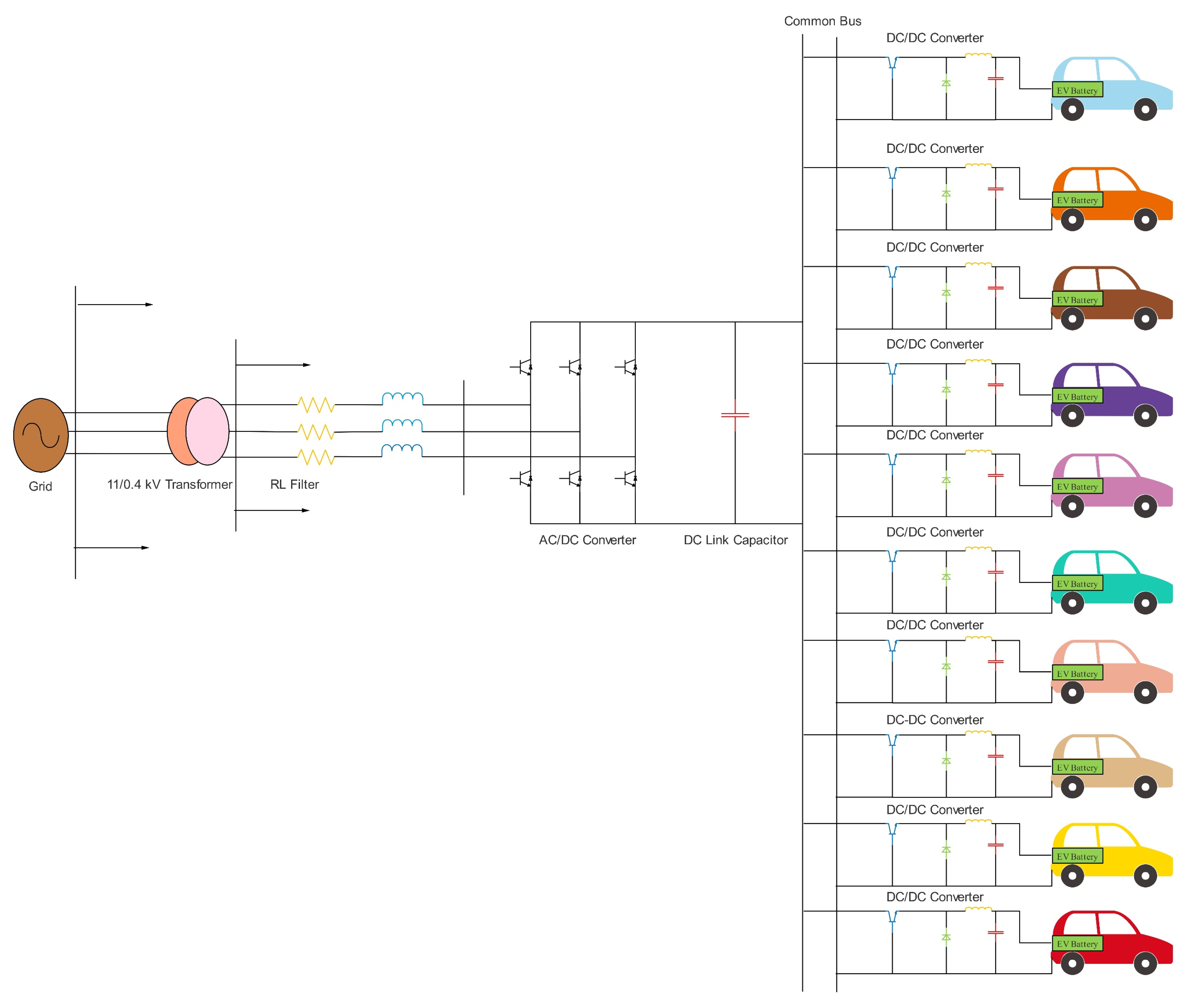
2. DC Bidirectional Fast Charging Station
2.1. Comprehensive AC/DC Converter Control
2.2. DC/DC Converter Control
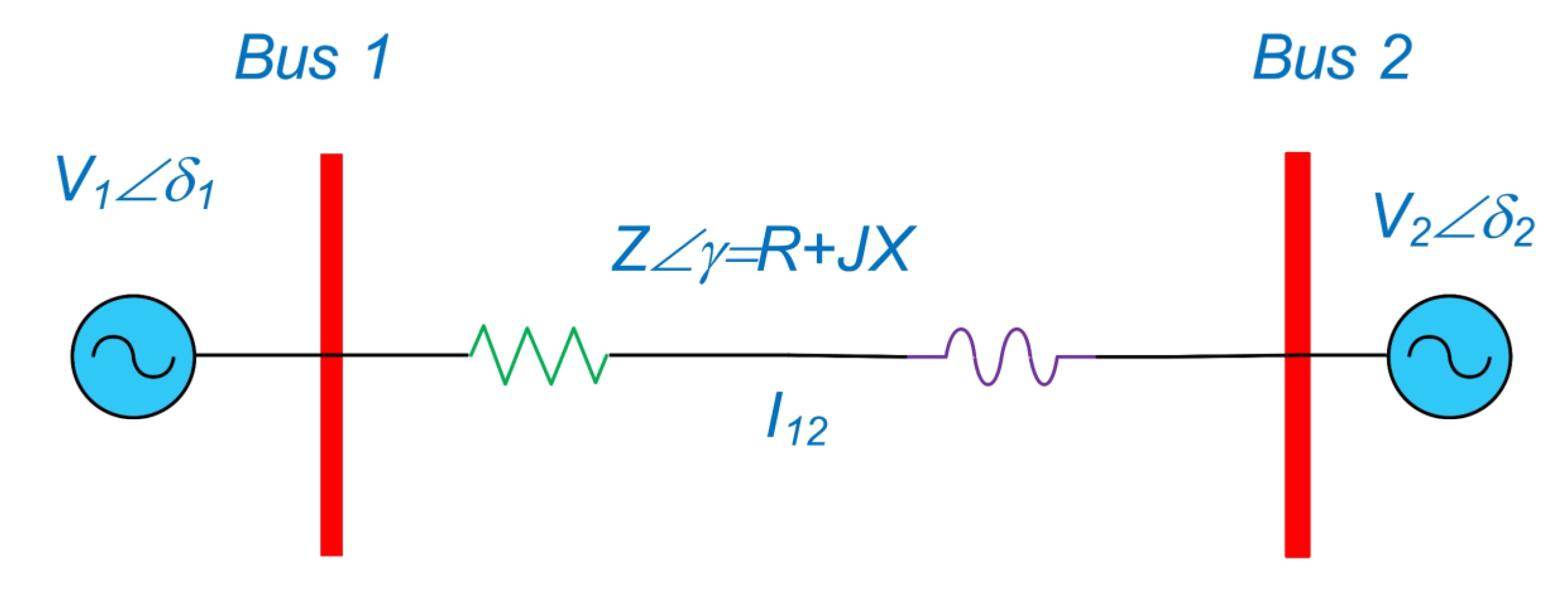
2.3. Two-Way Power Transmission
2.4. EV Battery Modeling
Sine Pulse Width Modulation
3. Proposed Method
3.1. Paralleling Synchronous Generators with the Network and with Each Other
3.2. Proposed System Modeling
4. Simulation of Bidirectional Reactive Power Exchange in the Studied Network
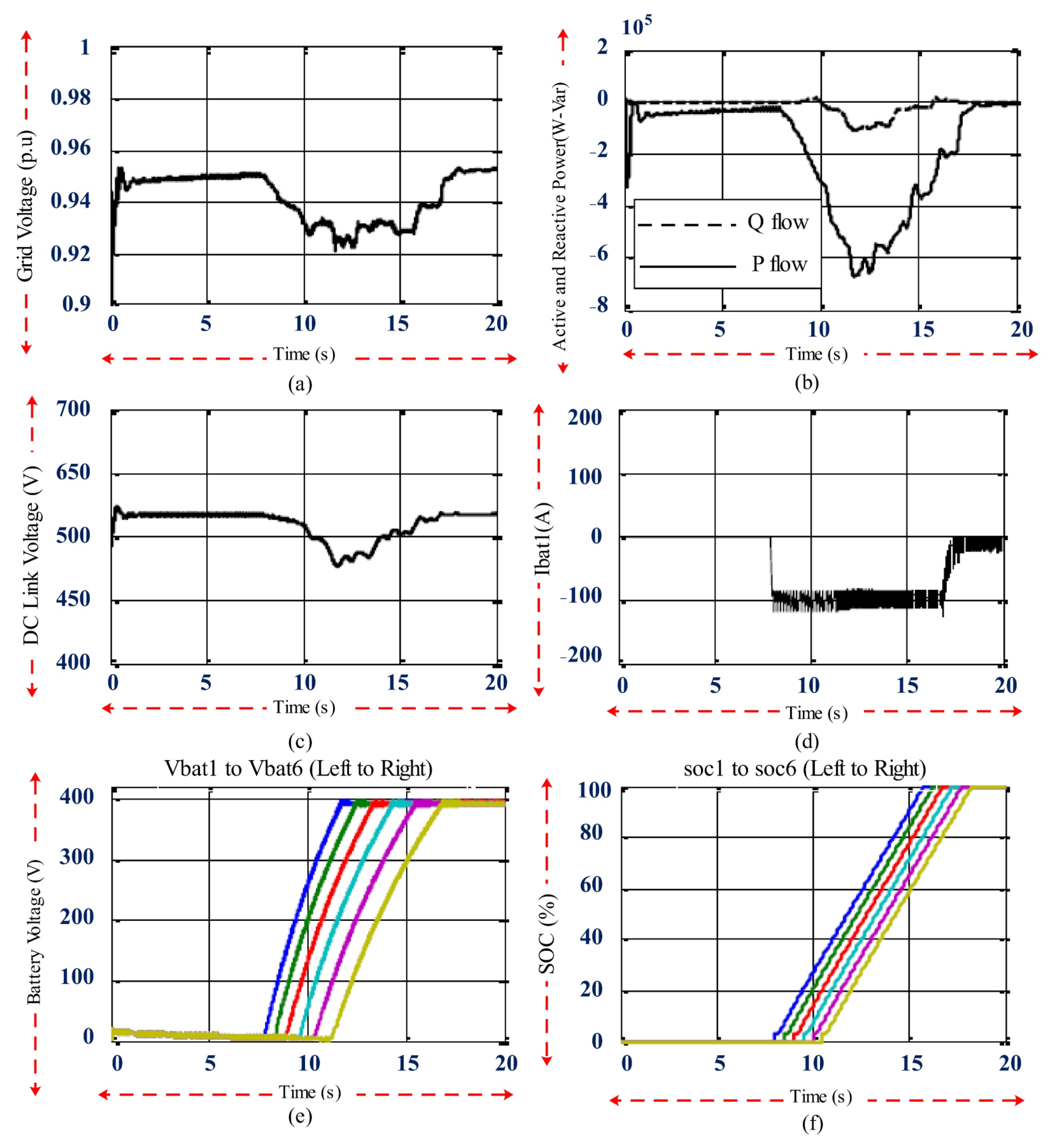
4.1. Analysis and Simulation of CC/RCC Charging Modes with DC/DC Converters
4.2. Simulation and Analysis of Bidirectional Reactive Power Exchange
4.2.1. Fast Charging of EVs without Reactive Power Compensation
4.2.2. Fast Charging of EVs with Reactive Power Compensation
- (A)
- Voltage adjustment for steady state voltage of 0.96 p.u
- (B) Voltage adjustment for the nominal voltage of 1 unit
- (C) Simulation and analysis of the proposed plan
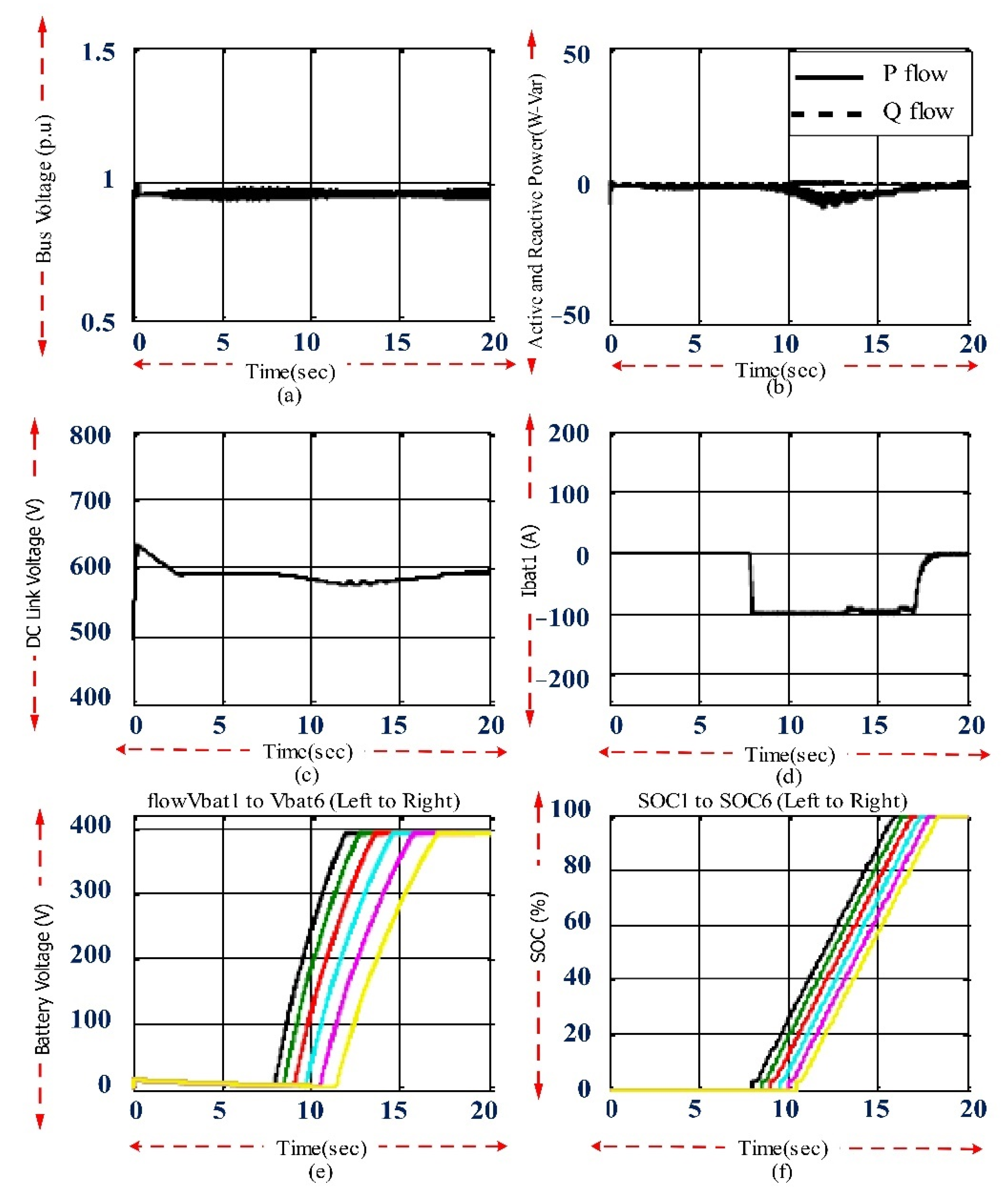
4.3. Autonomous Microgrid Simulation for Charging EV Batteries
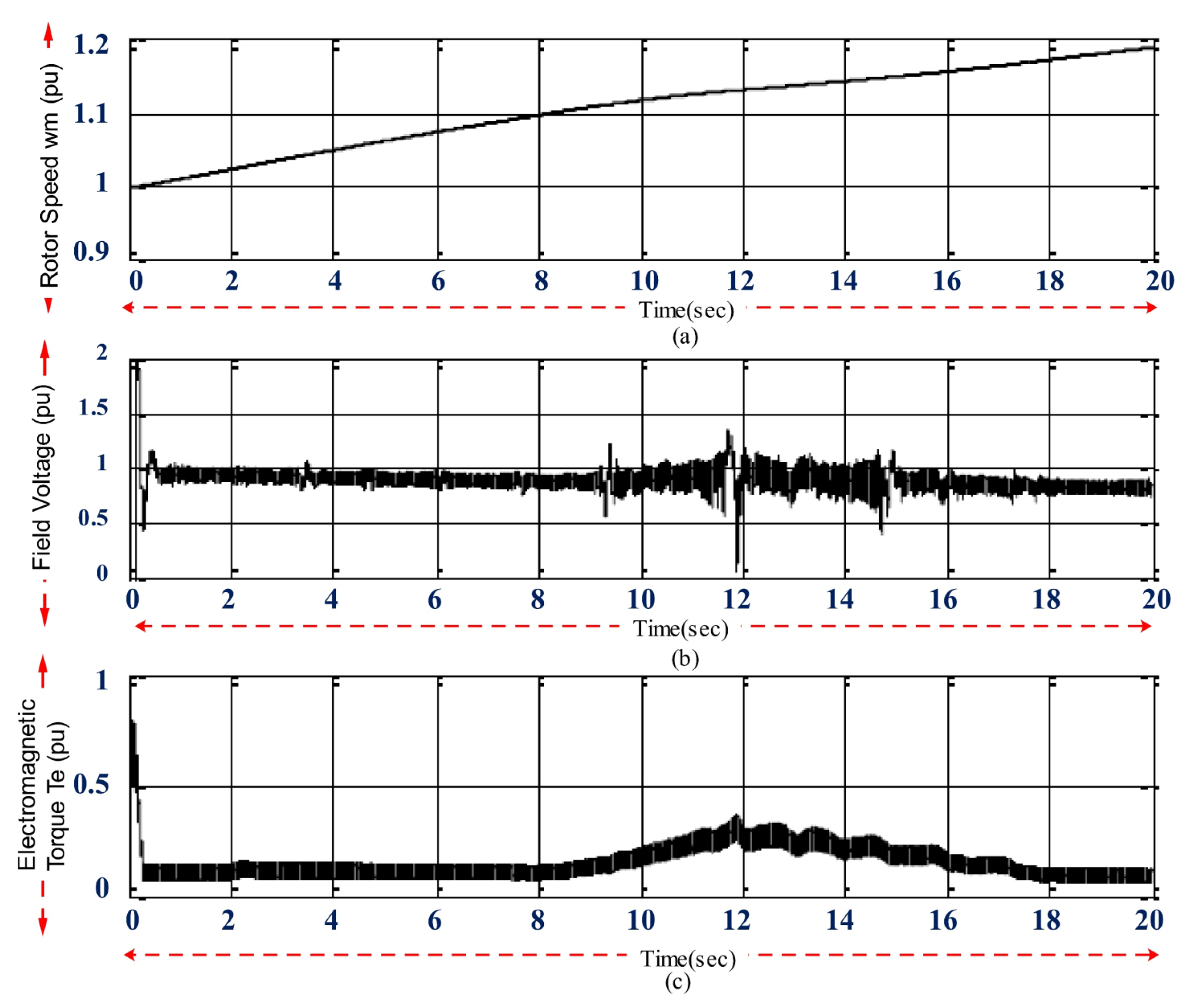
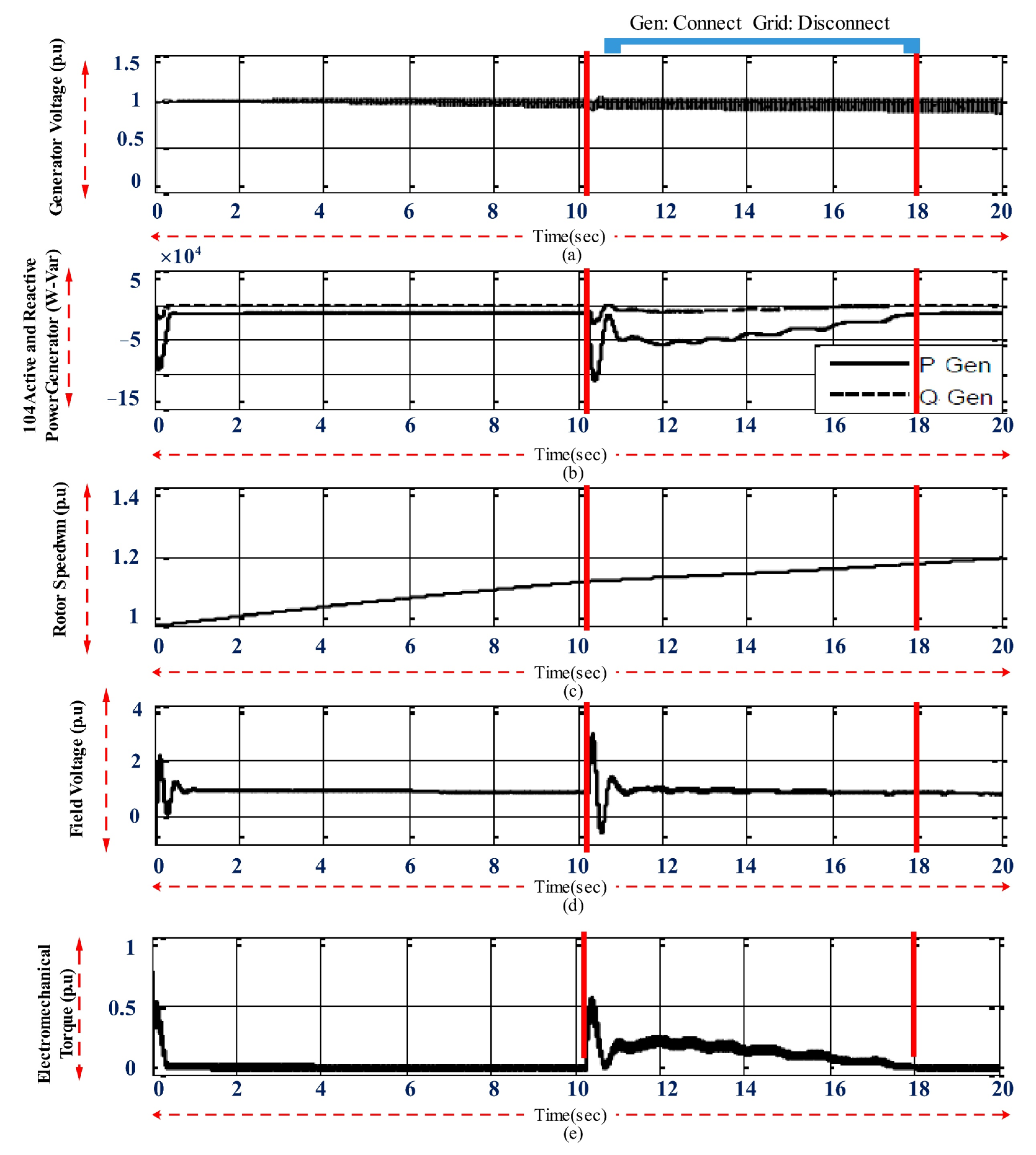
4.4. Simulating the Microgrid Connected to a Distribution Network and a Diesel Generator
4.5. Simulation of Microgrid Connected to the Distribution Network and Diesel Generator Selectively
5. Conclusions and Future Work
5.1. Conclusion
5.2. Future Work
- The design of a power controller is suggested for the diesel generator so that with any change in the DC link voltage range, the diesel can maintain the link voltage by injecting sufficient power in the reference value.
- To improve the microgrid’s efficiency and increase its reliability, it is suggested to use other scattered products such as wind turbines, solar modules, and fuel cells.
- In the method of the selective feeding of the diesel and network bus, the basis for changing the source from the network bus to the diesel generator and vice versa is the voltage range of the DC link (in this study, the basis for changing and switching sources to each other was the voltage drop in the distribution network bus).
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
Nomenclature and Abbreviation
| Nomenclature | |||
| I(t) | EV charging current | EV | Electric vehicle |
| Rated capacity of ith EV battery in Ah | BMS | Battery management system | |
| Number of charging EVs in the time slot | NLP | Nonlinear programming problem | |
| C | Charging rate of EVs | CC/RCC | Constant current/constant reverse current |
| Power of generation of PV system in parking lots | PCA | Principal component analysis | |
| Time | IOT | Internet of the things | |
| The line connected to the bass | RFID | Radiofrequency identification | |
| Upstream energy costs | DL | Deep learning | |
| Maximum and minimum active power output of the upstream network | ML | Machine learning | |
| Maximum and minimum reactive power produced by the upstream network | BD | Big data | |
| Maximum and minimum voltage | LSTM | Long short-term memory | |
| Number of network buses | R | Resiliency | |
| Connecting electric vehicles to the network | IPV | Internet protocol version | |
| The initial charge level of the electric car when entering the parking lot | MG | Microgrid | |
| Suspension | EV | Electric vehicle | |
| Capacity | DG | Distributed generation | |
| Network line | EMS | Energy management strategy | |
| Reactive load | SAG CS | Stand-alone grid Charging station | |
| Active time | LIB | Lithium-ion battery | |
| Battery capacity | MPPT | Maximum power point tracking | |
| Electric car battery charge rate | PV | Photovoltaic | |
| Total cost | PHEV | Plug-in hybrid electric vehicle | |
| Total wasted power | DES | Distributed energy resource | |
| The real part of the voltage | PWM | Pulse width modulation | |
| The imaginary part of the voltage | DAB | Dual active bridge | |
| The real part of the flow | STC | Standard test condition | |
| The imaginary part of the flow | BMS | Battery management system | |
| Ploss(.) | Lost active power | SOC | State of charge |
| Lost active power | MIDC | Measurement and instrumentation Data center | |
| Total network losses per hour | OB | Off-board | |
| Total network losses | RE | Renewable energy | |
| CB | Capacity of battery | PCA | Principal component analysis |
References
- Dinkhah, S.; Negri, C.A.; He, M.; Bayne, S.B. V2G for Reliable Microgrid Operations: Voltage/Frequency Regulation with Virtual Inertia Emulation. In Proceedings of the 2019 IEEE Transportation Electrification Conference and Expo (ITEC), Novi, MI, USA, 19–21 June 2019; pp. 1–6. [Google Scholar] [CrossRef]
- Dashtaki, A.A.; Khaki, M.; Zand, M.; Nasab, M.A.; Sanjeevikumar, P.; Samavat, T.; Khan, B. A Day Ahead Electrical Appliance Planning of Residential Units in a Smart Home Network Using ITS-BF Algorithm. Available online: https://www.hindawi.com/journals/itees/2022/2549887/ (accessed on 10 October 2022).
- Asadi, A.H.K.; Jahangiri, A.; Zand, M.; Eskandari, M.; Nasab, M.A.; Meyar-Naimi, H. Optimal Design of High Density HTS-SMES Step-Shaped Cross-Sectional Solenoid to Mechanical Stress Reduction. Available online: https://ieeexplore.ieee.org/document/9763198/ (accessed on 10 October 2022).
- Onat, N.C.; Kucukvar, M. A systematic review on sustainability assessment of electric vehicles: Knowledge gaps and future perspectives. Environ. Impact Assess. Rev. 2022, 97, 106867. [Google Scholar] [CrossRef]
- Unar, N.A.; Mirjat, N.H.; Aslam, B.; Qasmi, M.A.; Ansari, M.; Lohana, K. Modeling and Analysis of Load Growth Expected for Electric Vehicles in Pakistan (2021–2030). Energies 2022, 15, 5426. [Google Scholar] [CrossRef]
- Sanjeevikumar, P.; Zand, M.; Nasab, M.A.; Hanif, M.A.; Bhaskar, M.S. Spider Community Optimization Algorithm to Determine UPFC Optimal Size and Location for Improve Dynamic Stability. Available online: https://ieeexplore.ieee.org/document/9479149/ (accessed on 10 October 2022).
- Tightiz, L.; Nasab, M.A.; Yang, H.; Addeh, A. An intelligent system based on optimized ANFIS and association rules for power transformer fault diagnosis. ISA Trans. 2020, 103, 63–74. [Google Scholar] [CrossRef] [PubMed]
- Davoudi, M.; Jooshaki, M.; Moeini-Aghtaie, M.; Barmayoon, M.H.; Aien, M. Developing a multi-objective multi-layer model for optimal design of residential complex energy systems. Int. J. Electr. Power Energy Syst. 2022, 138, 107889. [Google Scholar] [CrossRef]
- Zantye, M.S.; Gandhi, A.; Wang, Y.; Vudata, S.P.; Bhattacharyya, D.; Hasan, M.F. Optimal design and integration of decentralized electrochemical energy storage with renewables and fossil plants. Energy Environ. Sci. 2022, 15, 4119–4136. [Google Scholar] [CrossRef]
- Marocco, P.; Ferrero, D.; Lanzini, A.; Santarelli, M. The role of hydrogen in the optimal design of off-grid hybrid renewable energy systems. J. Energy Storage 2022, 46, 103893. [Google Scholar] [CrossRef]
- He, X.; Qiu, J.; Wang, W.; Hou, Y.; Ayyub, M.; Shuai, Y. A review on numerical simulation, optimization design and applications of packed-bed latent thermal energy storage system with spherical capsules. J. Energy Storage 2022, 51, 104555. [Google Scholar] [CrossRef]
- Robust Speed Control for Induction Motor Drives Using STSM Control. Available online: https://ieeexplore.ieee.org/document/9405912 (accessed on 10 October 2022).
- Chen, Y.; Wang, R.; Ming, M.; Cheng, S.; Bao, Y.; Zhang, W.; Zhang, C. Constraint multi-objective optimal design of hybrid renewable energy system considering load characteristics. Complex Intell. Syst. 2022, 8, 803–817. [Google Scholar] [CrossRef]
- Nasab, M.A.; Zand, M.; Eskandari, M.; Sanjeevikumar, P.; Siano, P. Optimal Planning of Electrical Appliance of Residential Units in a Smart Home Network Using Cloud Services. Smart Cities 2021, 4, 1173–1195. [Google Scholar] [CrossRef]
- Elmorshedy, M.F.; Elkadeem, M.R.; Kotb, K.M.; Taha, I.B.; Mazzeo, D. Optimal design and energy management of an isolated fully renewable energy system integrating batteries and supercapacitors. Energy Convers. Manag. 2021, 245, 114584. [Google Scholar] [CrossRef]
- Rishabh, G.; van Wijk, A.; Lukszo, Z. Off-grid solar charging of electric vehicles at long-term parking locations. Energy 2021, 227, 120356. [Google Scholar]
- Prakash, K.; Ali, M.; Siddique, M.N.I.; Karmaker, A.K.; Macana, C.A.A.; Dong, D.; Pota, H.R. Bi-level planning and scheduling of electric vehicle charging stations for peak shaving and congestion management in low voltage distribution networks. Comput. Electr. Eng. 2022, 102, 108235. [Google Scholar] [CrossRef]
- Khosravi, S.; Hayati, M. Design of GaAs-thin film solar cell using TiO2 hemispherical nanoparticles array. Opt. Laser Technol. 2022, 156, 108608. [Google Scholar]
- Pearre, N.S.; Swan, L.G.; Burbidge, E.; Balloch, S.; Horrocks, L.; Piper, B.; Anctil, J. Regional Electric Vehicle Fast Charging Network Design Using Common Public Data. World Electr. Veh. J. 2022, 13, 212. [Google Scholar] [CrossRef]
- Saadati, R.; Saebi, J.; Jafari-Nokandi, M. Effect of uncertainties on siting and sizing of charging stations and renewable energy resources: A modified capacitated flow-refueling location model. Sustain. Energy Grids Netw. 2022, 31, 100759. [Google Scholar] [CrossRef]
- A Hybrid Scheme for Fault Locating in Transmission Lines Compensated by the TCSC. Available online: https://ieeexplore.ieee.org/document/9375626 (accessed on 10 October 2022).
- Al-Thani, H.; Koç, M.; Isaifan, R.J.; Bicer, Y. A Review of the Integrated Renewable Energy Systems for Sustainable Urban Mobility. Sustainability 2022, 14, 10517. [Google Scholar] [CrossRef]
- Cui, Z.; Kang, L.; Li, L.; Wang, L.; Wang, K. A combined state-of-charge estimation method for lithium-ion battery using an improved BGRU network and UKF. Energy 2022, 259, 124933. [Google Scholar] [CrossRef]
- A Hybrid Scheme for Fault Locating for Transmission Lines with TCSC. Available online: https://ieeexplore.ieee.org/document/9763217/ (accessed on 10 October 2022).
- Mo, T.; Li, Y.; Lau, K.T.; Poon, C.K.; Wu, Y.; Luo, Y. Trends and Emerging Technologies for the Development of Electric Vehicles. Energies 2022, 15, 6271. [Google Scholar] [CrossRef]
- Pal, R.; Chavhan, S.; Gupta, D.; Khanna, A.; Padmanaban, S.; Khan, B.; Rodrigues, J.J. A comprehensive review on IoT-based infrastructure for smart grid applications. IET Renew. Power Gener. 2021, 15, 3761–3776. [Google Scholar] [CrossRef]
- Petrucci, A.; Barone, G.; Buonomano, A.; Athienitis, A. Modelling of a multi-stage energy management control routine for energy demand forecasting, flexibility, and optimization of smart communities using a Recurrent Neural Network. Energy Convers. Manag. 2022, 268, 115995. [Google Scholar] [CrossRef]
- Zand, Z.; Hayati, M.; Karimi, G. Short-Channel Effects Improvement of Carbon Nanotube Field Effect Transistors. In Proceedings of the 28th Iranian Conference on Electrical Engineering (ICEE), Tabriz, Iran, 26–28 May 2020; pp. 1–6. [Google Scholar] [CrossRef]
- Zand, M.; Nasab, M.A.; Sanjeevikumar, P.; Maroti, P.K.; Holm-Nielsen, J.B. Energy management strategy for solid-state transformer-based solar charging station for electric vehicles in smart grids. IET Renew. Power Gener. 2020, 14, 3843–3852. [Google Scholar] [CrossRef]
- Chen, J.; Ramanathan, L.; Alazab, M. Holistic big data integrated artificial intelligent modeling to improve privacy and security in data management of smart cities. Microprocess. Microsyst. 2020, 81, 103722. [Google Scholar] [CrossRef]
- Khalili, M.; Ali Dashtaki, M.; Nasab, M.A.; Reza Hanif, H.; Padmanaban, S.; Khan, B. Optimal instantaneous prediction of voltage instability due to transient faults in power networks taking into account the dynamic effect of generators. Cogent. Engineering 2022, 9, 2072568. [Google Scholar] [CrossRef]
- Nezamabad, H.A.; Zand, M.; Alizadeh, A.; Vosoogh, M.; Nojavan, S. Multi-objective optimization based robust scheduling of electric vehicles aggregator. Sustain. Cities Soc. 2019, 47, 101494. [Google Scholar] [CrossRef]
- Makolo, P.; Zamora, R.; Lie, T.-T. The role of inertia for grid flexibility under high penetration of variable renewables—A review of challenges and solutions. Renew. Sustain. Energy Rev. 2021, 147, 111223. [Google Scholar] [CrossRef]
- Chen, J.; Huang, S.; Shahabi, L. Economic and environmental operation of power systems including combined cooling, heating, power and energy storage resources using developed multi-objective grey wolf algorithm. Appl. Energy 2021, 298, 117257. [Google Scholar] [CrossRef]
- Nasab, M.A.; Zand, M.; Padmanaban, S.; Bhaskar, M.S.S.; Guerrero, J.M. An efficient, robust optimization model for the unit commitment considering of renewables uncertainty and Pumped-Storage Hydropower. Comput. Electr. Eng. 2022, 100, 107846. [Google Scholar] [CrossRef]
- Sanjeevikumar, P.; Samavat, T.; Nasab, M.A.; Zand, M.; Khoobani, M. Machine learning-based hybrid demand-side controller for renewable energy management. In Sustainable Developments by Artificial Intelligence and Machine Learning for Renewable Energies; Elsevier: Amsterdam, The Netherlands, 2022; pp. 291–307. [Google Scholar] [CrossRef]
- Solanke, T.U.; Khatua, P.K.; Ramachandaramurthy, V.K.; Yong, J.Y.; Tan, K.M. Control and management of a multilevel EVs infrastructure integrated with distributed resources: A comprehensive review. Renew. Sustain. Energy Rev. 2021, 144, 111020. [Google Scholar] [CrossRef]
- Hou, Z.; Guo, J.; Xing, J.; Guo, C.; Zhang, Y. Machine learning and whale optimization algorithm based design of energy management strategy for plug-in hybrid electric vehicle. IET Intell. Transp. Syst. 2021, 15, 1076–1091. [Google Scholar] [CrossRef]
- Zand, M.; Nasab, M.A.; Neghabi, O.; Khalili, M.; Goli, A. Fault locating transmission lines with thyristor-controlled series capacitors by fuzzy logic method. In Proceedings of the 14th International Conference on Protection and Automation of Power Systems (IPAPS), Tehran, Iran, 31 December 2019–1 January 2020; Institute of Electrical and Electronics Engineers (IEEE): Piscataway, NJ, USA, 2020; pp. 62–70. [Google Scholar] [CrossRef]
- Nilotpal, C.; Mondal, A.; Mondal, S. Intelligent charge scheduling and eco-routing mechanism for EVs: A multi-objective heuristic approach. Sustain. Cities Soc. 2021, 69, 102820. [Google Scholar]
- Annu, D.; Gupta, P.; Niranjan, V. Microgrid protection: A comprehensive review. Renew. Sustain. Energy Rev. 2021, 149, 111401. [Google Scholar]
- Felix, B.; Kaiser, M.; Keller, R. Policy support measures for widespread expansion of fast charging infrastructure for EVs. Energy Policy 2021, 156, 112372. [Google Scholar]
- Zand, M.; Chamorro, H.R.; Nasab, M.A.; Hosseinian, S.H. Optimal reactive power dispatch using θ-social mimic optimization (θ-SMO). J. Intell. Fuzzy Syst. 2020, preprint, 1–15. [Google Scholar] [CrossRef]
- Nasri, S.; Nowdeh, S.A.; Davoudkhani, I.F.; Moghaddam, M.J.H.; Kalam, A.; Shahrokhi, S.; Zand, M. Maximum Power Point Tracking of Photovoltaic Renewable Energy System Using a New Method Based on Turbulent Flow of Water-Based Optimization (TFWO) Under Partial Shading Conditions. In Energy Systems in Electrical Engineering; Springer: Cham, Switzerland, 2021; pp. 285–310. ISBN 9789813364561. [Google Scholar] [CrossRef]
- Vogt, H.H.; de Melo, R.R.; Daher, S.; Schmuelling, B.; Antunes, F.L.M.; dos Santos, P.A.; Albiero, D. Electric tractor system for family farming: Increased autonomy and economic feasibility for an energy transition. J. Energy Storage 2021, 40, 102744. [Google Scholar] [CrossRef]
- Zand, M.; Nasab, M.A.; Hatami, A.; Kargar, M.; Chamorro, H.R. Using Adaptive Fuzzy Logic for Intelligent Energy Management in Hybrid Vehicles. In Proceedings of the 28th Iranian Conference on Electrical Engineering (ICEE), Tabriz, Iran, 4–6 August 2020; pp. 1–7. [Google Scholar] [CrossRef]
- Dashtaki, M.A.; Nafisi, H.; Khorsandi, A.; Hojabri, M.; Pouresmaeil, E. Dual Two-Level Voltage Source Inverter Virtual Inertia Emulation: A Comparative Study. Energies 2021, 14, 1160. [Google Scholar] [CrossRef]
- ANasab, M.A.; Zand, M.; Padmanaban, S.; Khan, B. Simultaneous Long-Term Planning of Flexible Electric Vehicle Photovoltaic Charging Stations in Terms of Load Response and Technical and Economic Indicators. World Electr. Veh. J. 2021, 12, 190. [Google Scholar] [CrossRef]
- Arzu, T.; Teke, A.; Alkaya, A. A comprehensive overview of the dc-dc converter-based battery charge balancing methods in EVs. Renew. Sustain. Energy Rev. 2020, 133, 110274. [Google Scholar]
- Determination of Power Transformers Health Index Using Parameters Affecting the Transformer’s Life. Available online: https://www.tandfonline.com/doi/abs/10.1080/03772063.2022.2048714?journalCode=tijr20 (accessed on 10 October 2022).
- Tao, H.; Wang, J.; Yaseen, Z.M.M.; Mohammed, M.N.; Zain, J.M. Shrewd vehicle framework model with a streamlined informed approach for green transportation in smart cities. Environ. Impact Assess. Rev. 2021, 87, 106542. [Google Scholar] [CrossRef]
- Lv, Z.; Chen, D.; Wang, Q. Diversified Technologies in Internet of Vehicles Under Intelligent Edge Computing. IEEE Trans. Intell. Transp. Syst. 2020, 22, 2048–2059. [Google Scholar] [CrossRef]
- Ghasemi, M.; Akbari, E.; Zand, M.; Hadipour, M.; Ghavidel, S.; Li, L. An Efficient Modified HPSO-TVAC-Based Dynamic Economic Dispatch of Generating Units. Electr. Power Components Syst. 2019, 47, 1826–1840. [Google Scholar] [CrossRef]
- Swathika, O.G.; Karthikeyan, K.; Padmanaban, S. Big Data for SMART Sensor and Intelligent Electronic Devices–Building Application. In Smart Buildings Digitalization; CRC Press: Boca Raton, FL, USA, 2022; pp. 11–28. [Google Scholar] [CrossRef]
- Rafik, M.; Fentis, A.; Khalili, T.; Youssfi, M.; Bouattane, O. Learning and Predictive Energy Consumption Model based on LSTM recursive neural networks. In Proceedings of the 2020 Fourth International Conference on Intelligent Computing in Data Sciences (ICDS), Fez, Morocco, 21–23 October 2020. [Google Scholar]























{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Condition | Power Transfer | |
|---|---|---|
| Active power of bass | Transfer from two to one | |
| Active power of bass | Transfer from one to two | |
| Reactive power of bass | Transfer from two to one | |
| Reactive power of bass | Transfer from one to two | |
| Parameters | Lithium Battery 360 Volt and 66.2201 Amp/h |
|---|---|
| 403.2643 | |
| 6.004 | |
| 384.864 | |
| 58.32 | |
| 345.62 |
| Generator Specification | Values |
|---|---|
| Nominated Demand and Power Factor | 200 kVA, 0.85 lag |
| Voltage and Nominated Frequency | 440 V, 50 Hz |
| H (Inertia Constant) | 24 s |
| Number of Poles | 4 |
| Xd, Xd′, Xd″ | 1.0305, 0.296, 0.252 (p.u) |
| Xq, Xq″, Xl | 0.474, 0.243, 0.18 (p.u) |
| Td′, Td″, Tqo″ | 1.01, 0.053, 0.1 (s) |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Rastgoo, S.; Mahdavi, Z.; Azimi Nasab, M.; Zand, M.; Padmanaban, S. Using an Intelligent Control Method for Electric Vehicle Charging in Microgrids. World Electr. Veh. J. 2022, 13, 222. https://doi.org/10.3390/wevj13120222
Rastgoo S, Mahdavi Z, Azimi Nasab M, Zand M, Padmanaban S. Using an Intelligent Control Method for Electric Vehicle Charging in Microgrids. World Electric Vehicle Journal. 2022; 13(12):222. https://doi.org/10.3390/wevj13120222
Chicago/Turabian StyleRastgoo, Samaneh, Zahra Mahdavi, Morteza Azimi Nasab, Mohammad Zand, and Sanjeevikumar Padmanaban. 2022. "Using an Intelligent Control Method for Electric Vehicle Charging in Microgrids" World Electric Vehicle Journal 13, no. 12: 222. https://doi.org/10.3390/wevj13120222