
Intelligent Motor Bearing Fault Diagnosis Using Channel Attention-Based CNN
Abstract
:1. Introduction
2. Methodology
2.1. A Brief Introduction to CNN
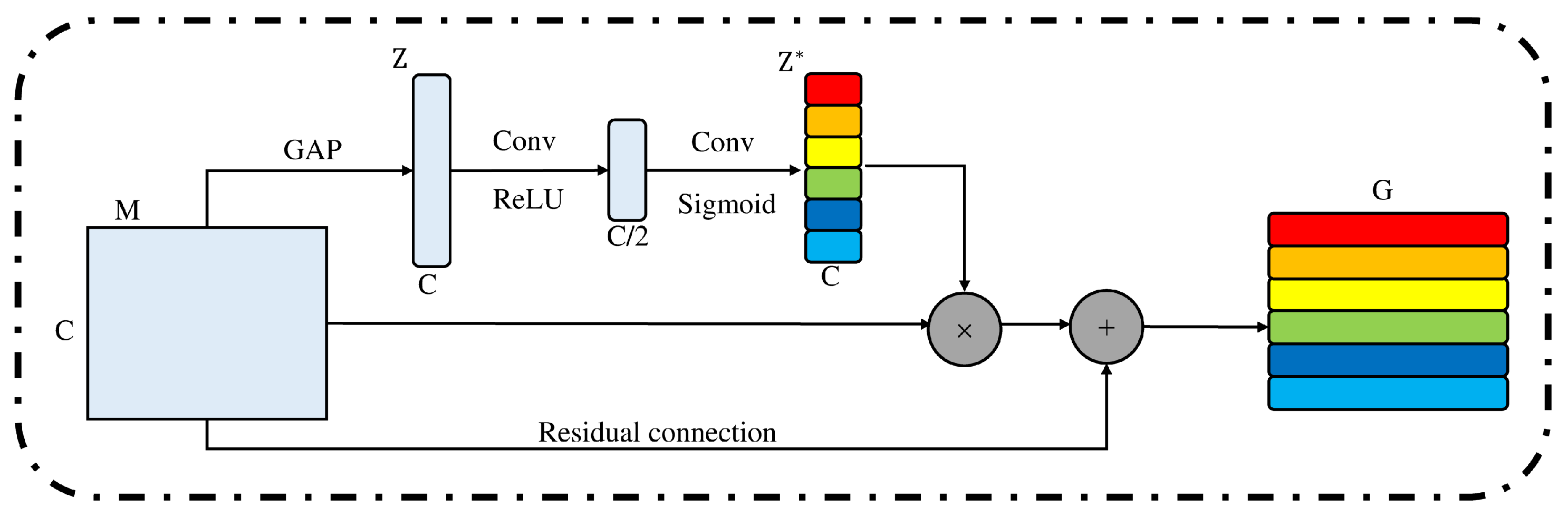
2.2. Channel Attention
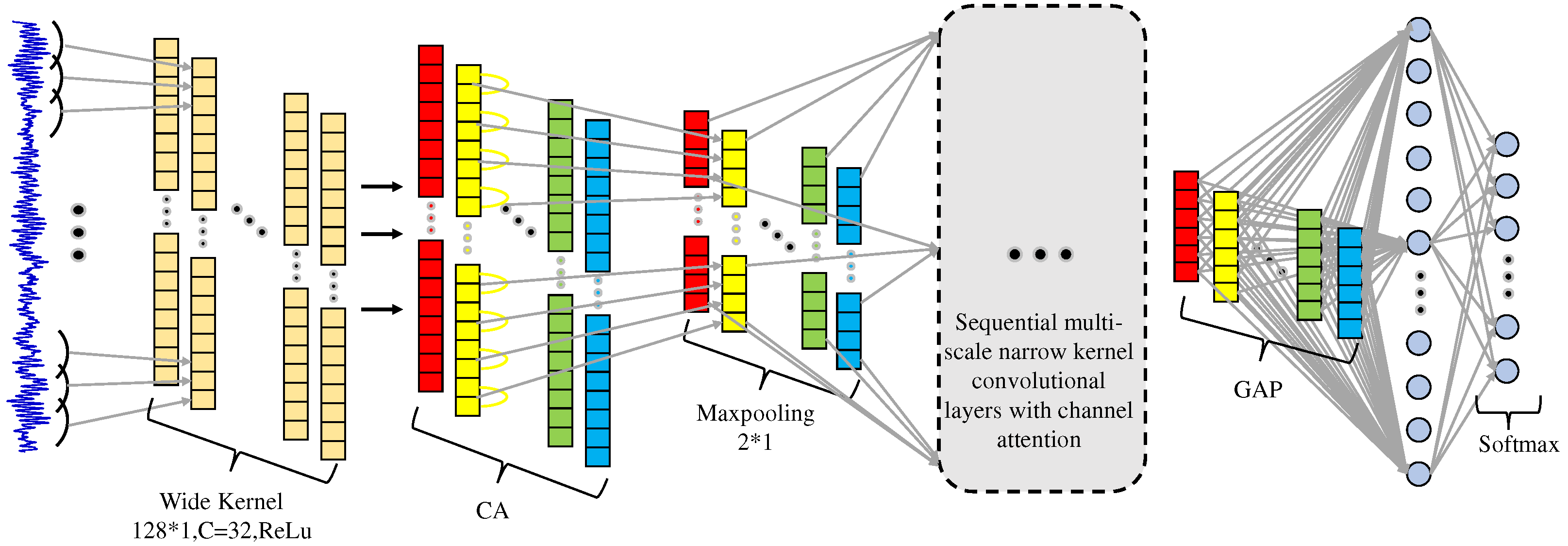
2.3. Proposed CA-CNN Intelligent Diagnosis Method
3. Results and Discussion
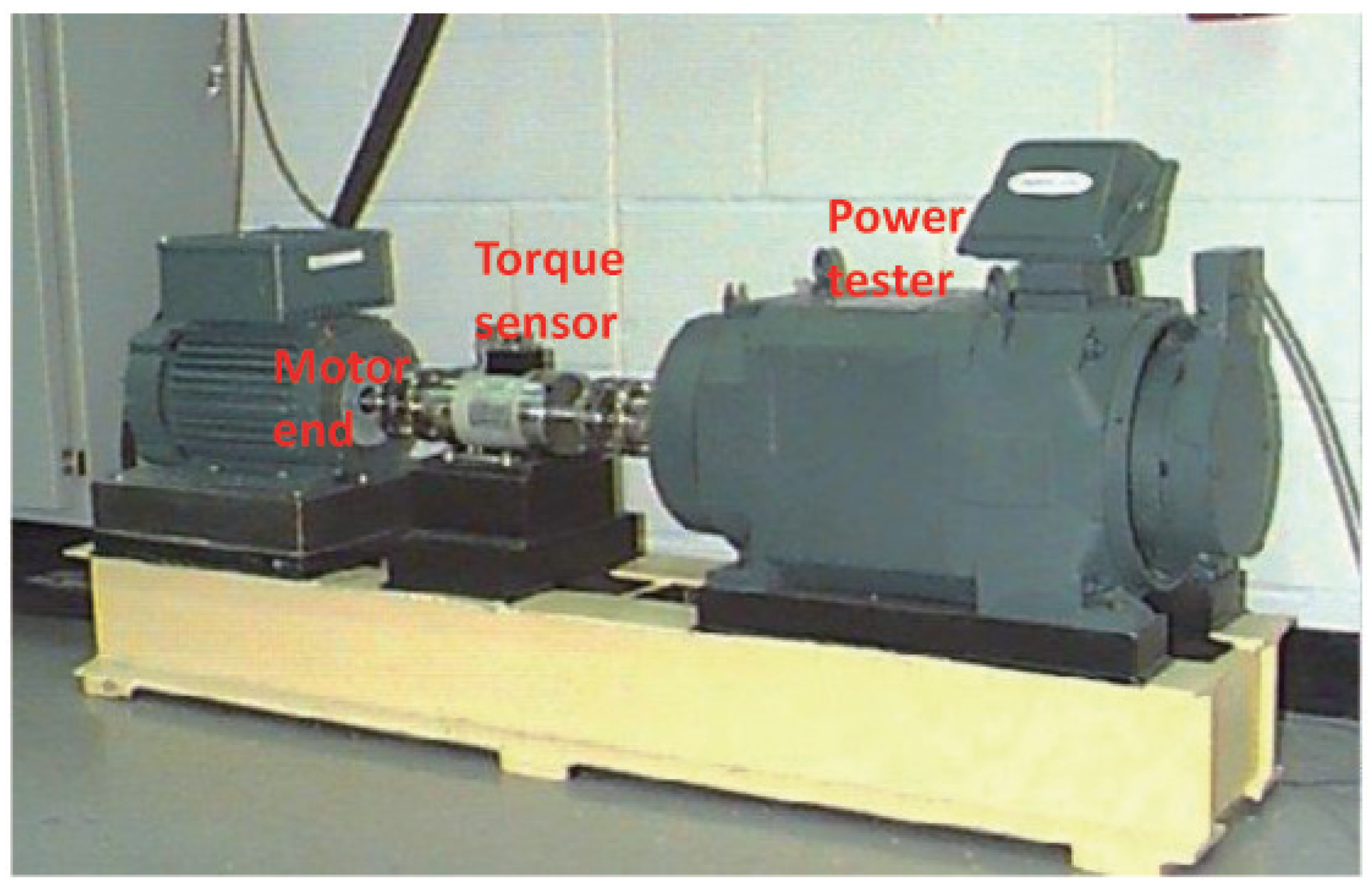
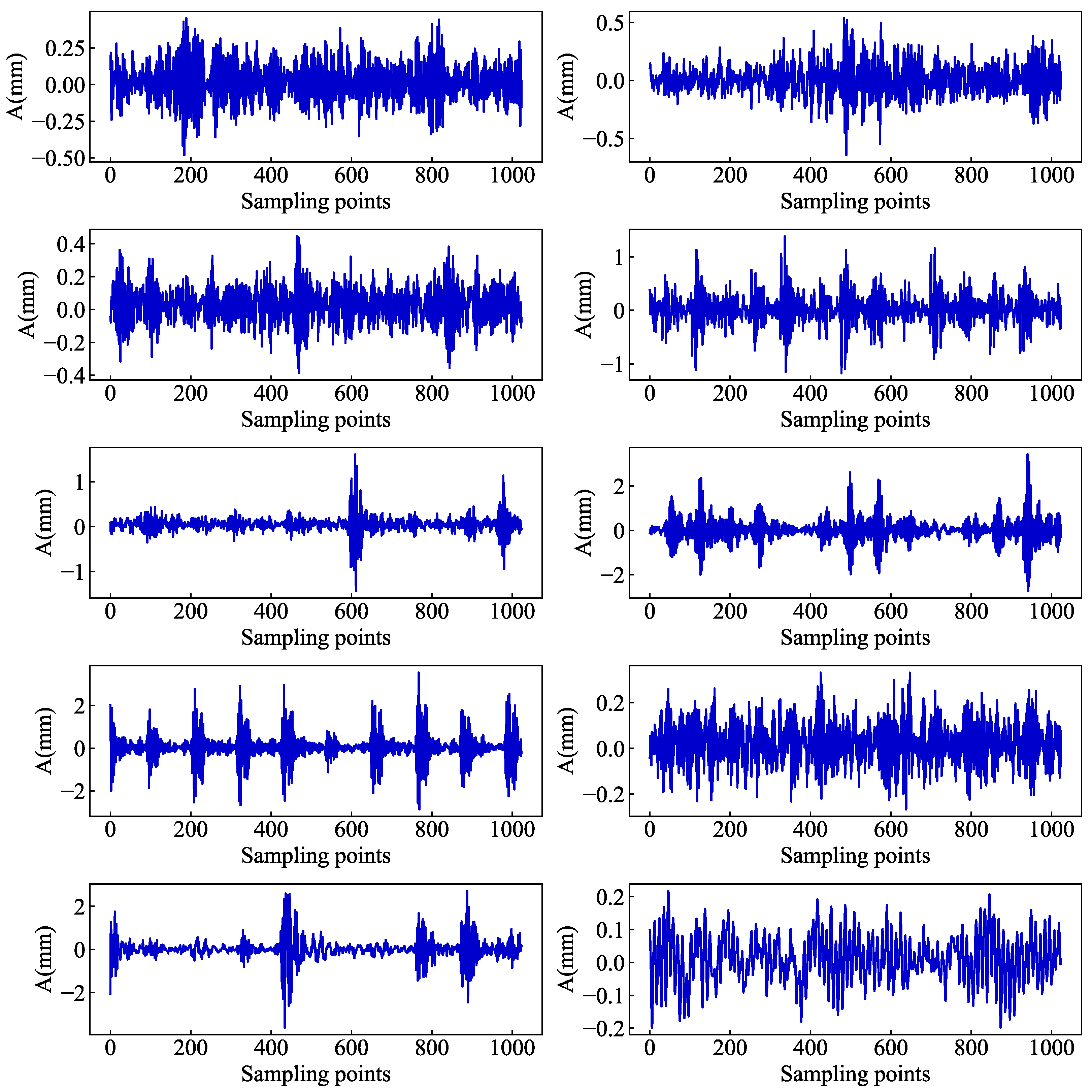
3.1. Data Description
3.2. Parameters Setting
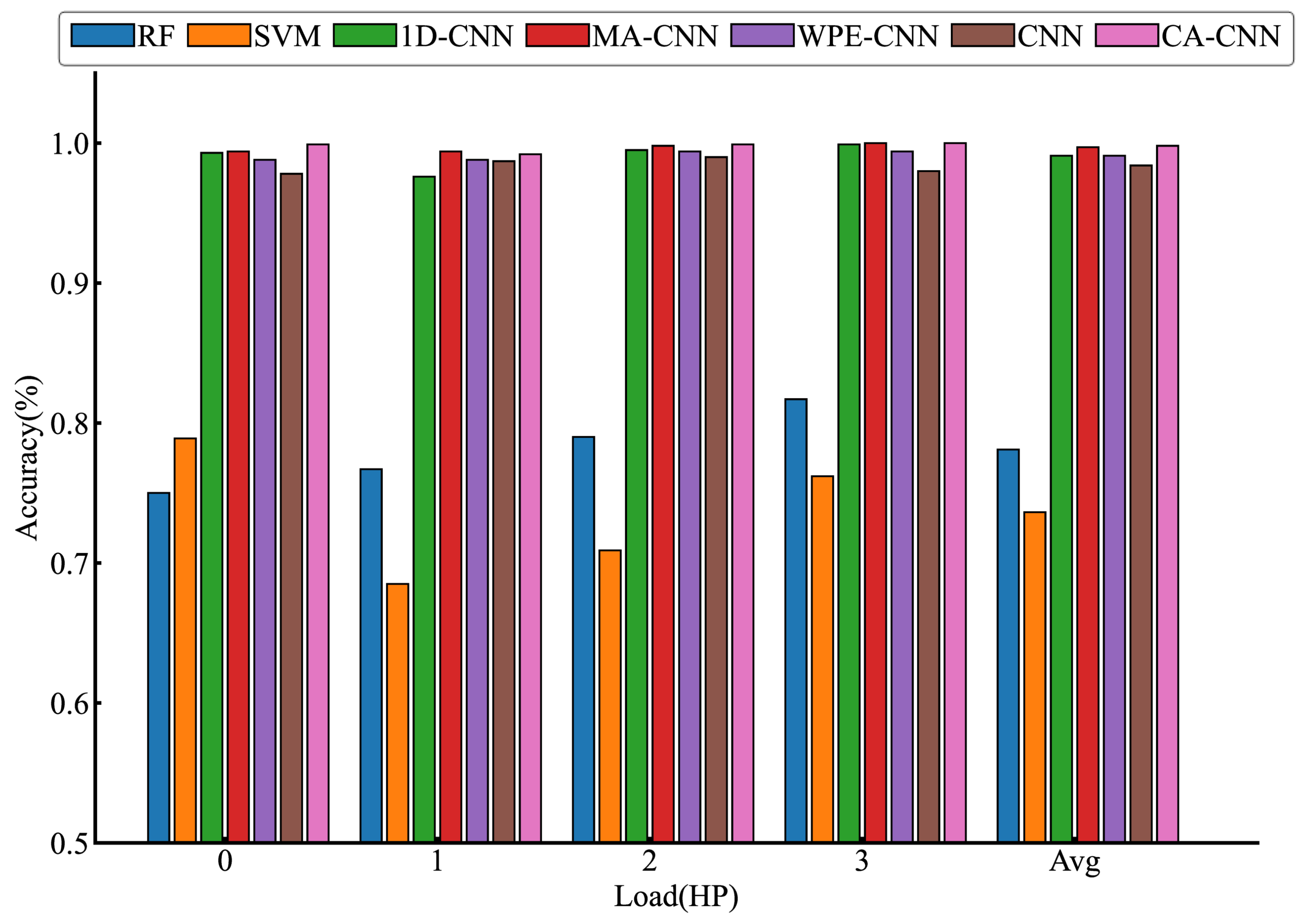
3.3. Fault Diagnosis Results under Different Load
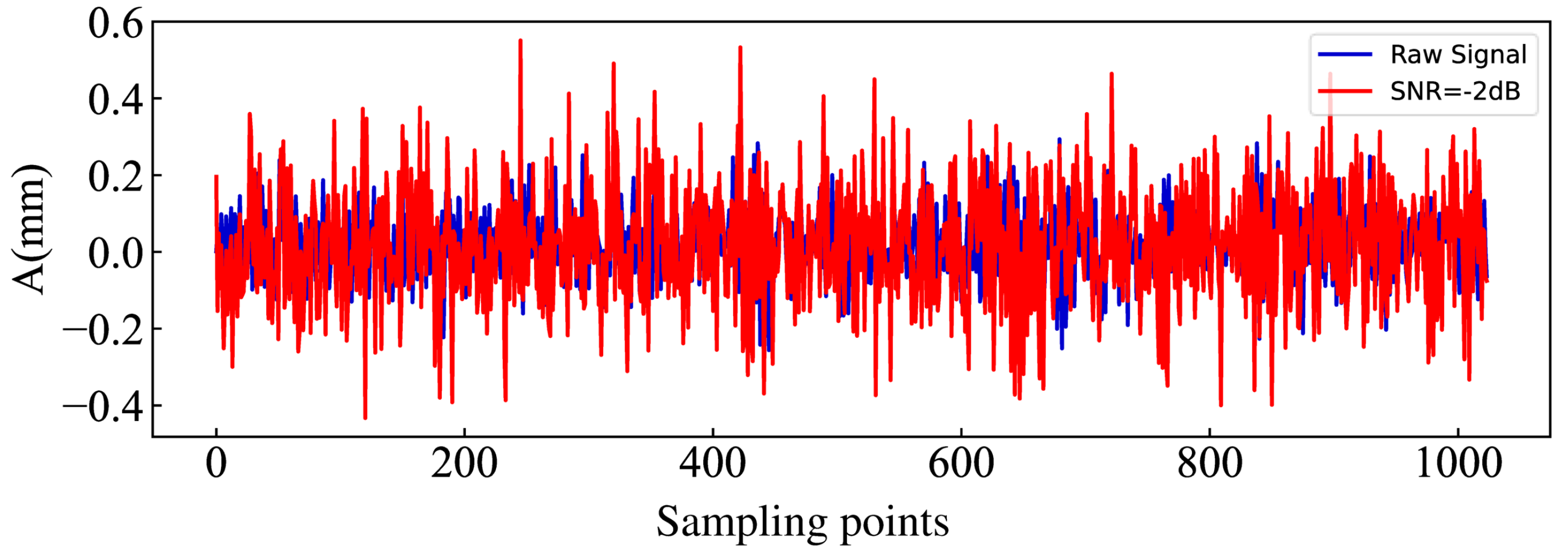
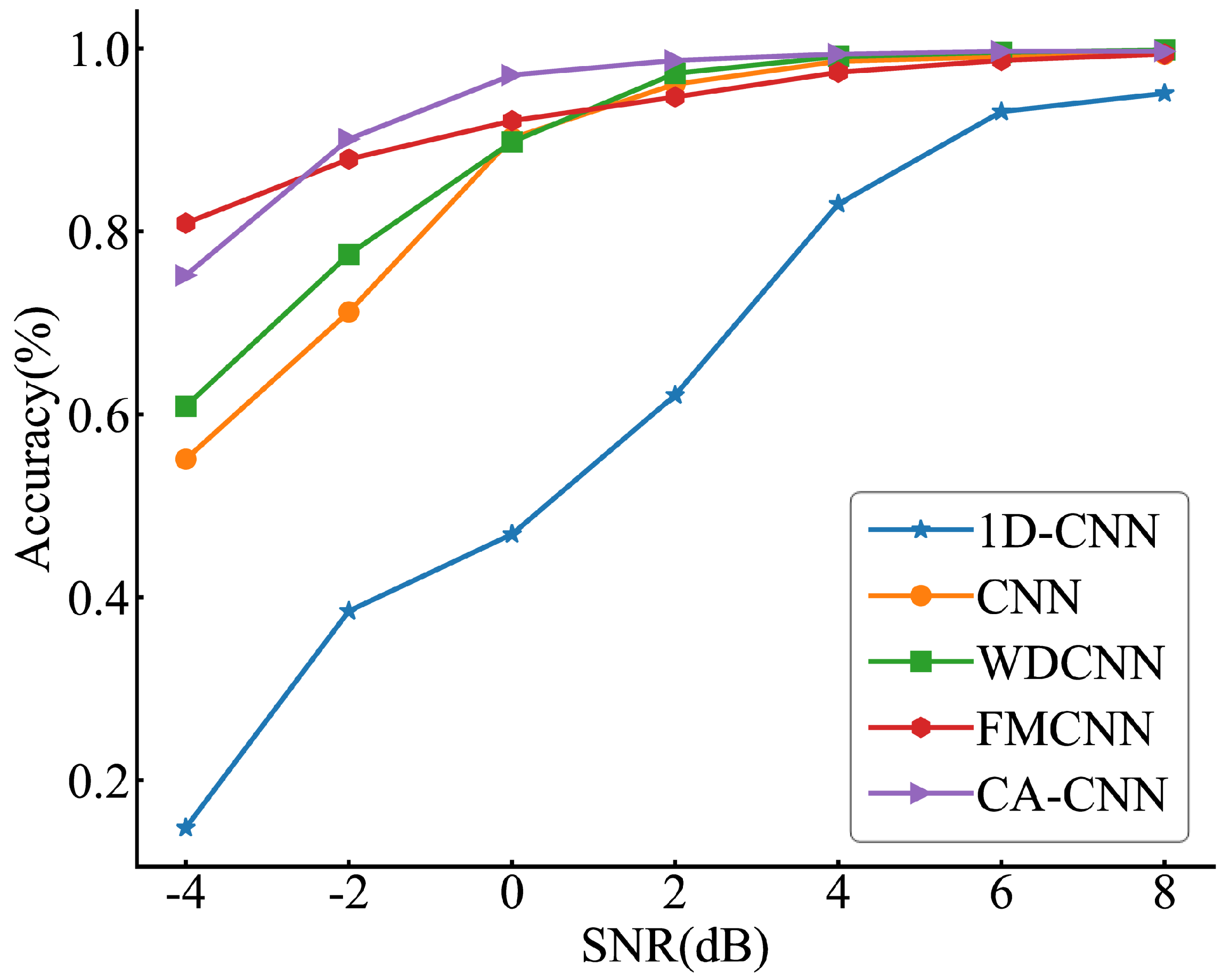
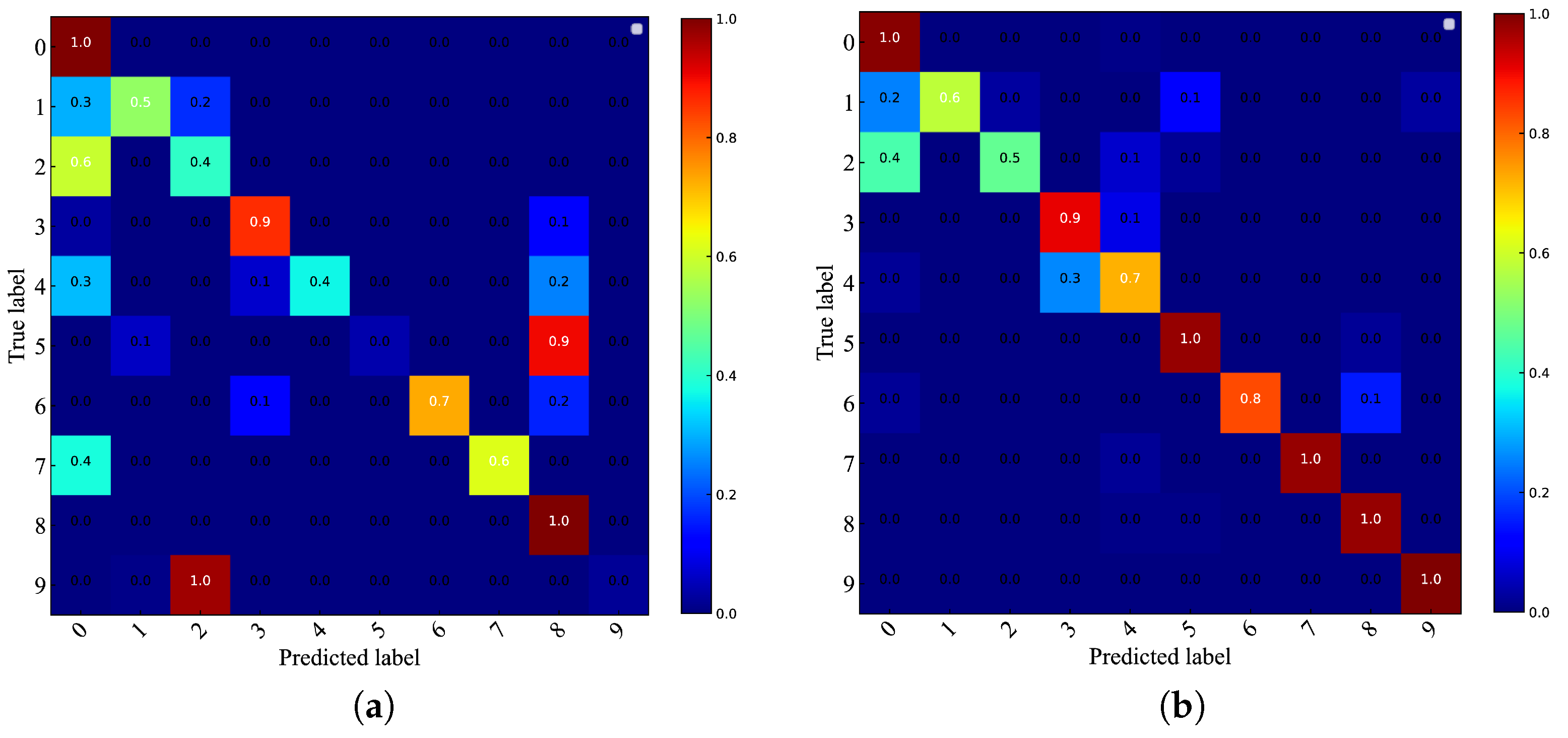
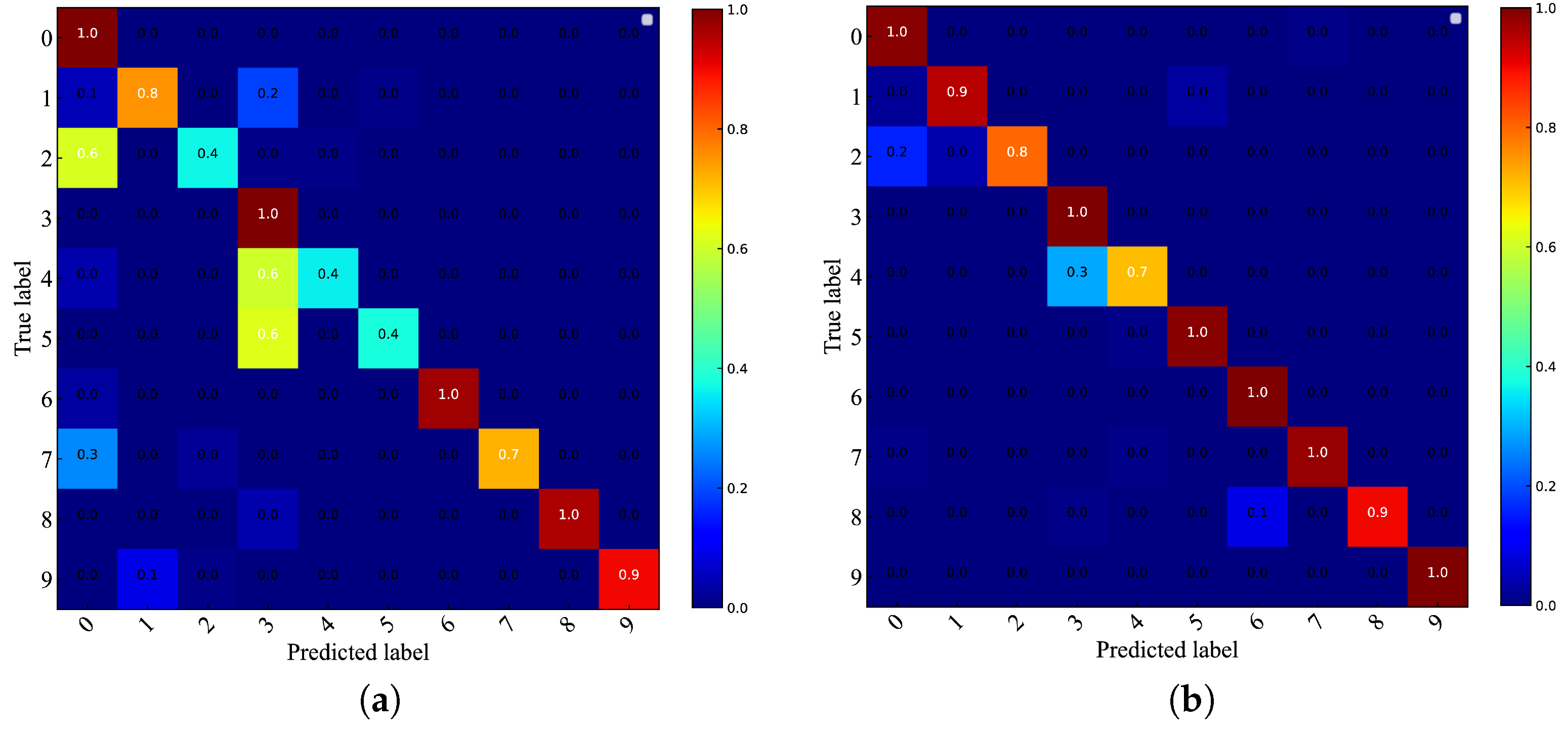
3.4. Fault Diagnosis Results under Noise Environment
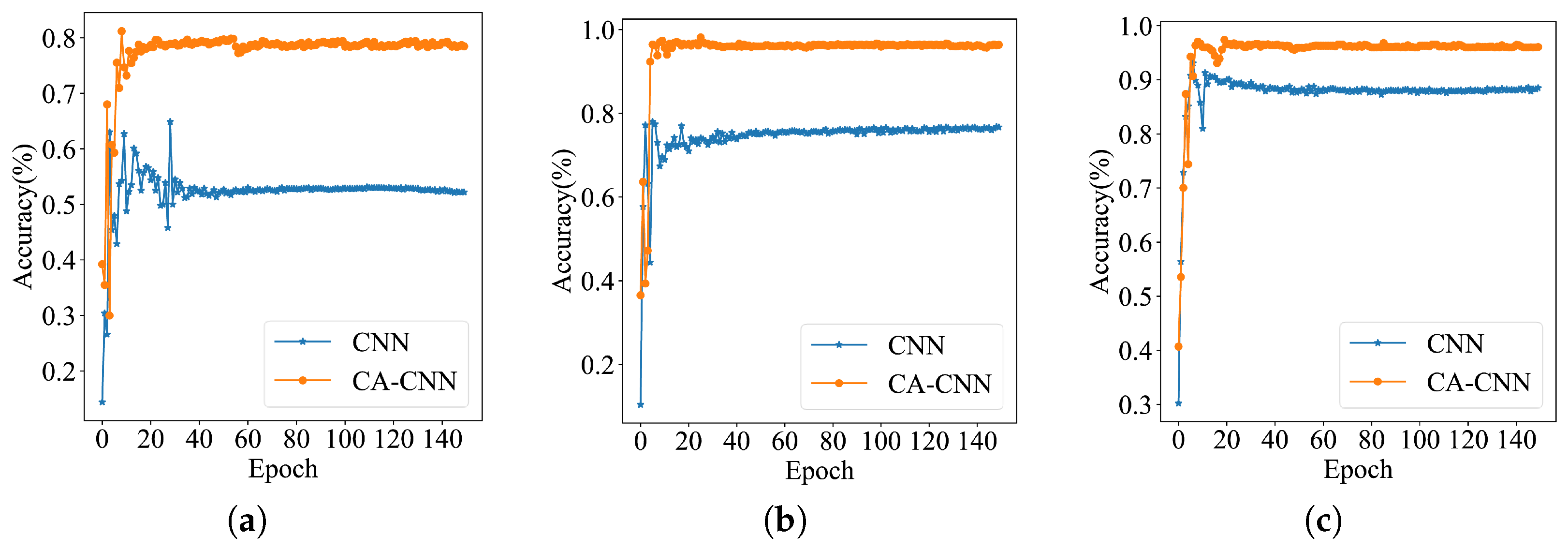
3.5. Training Process Comparison
3.6. Visual Analysis of Diagnosis Results
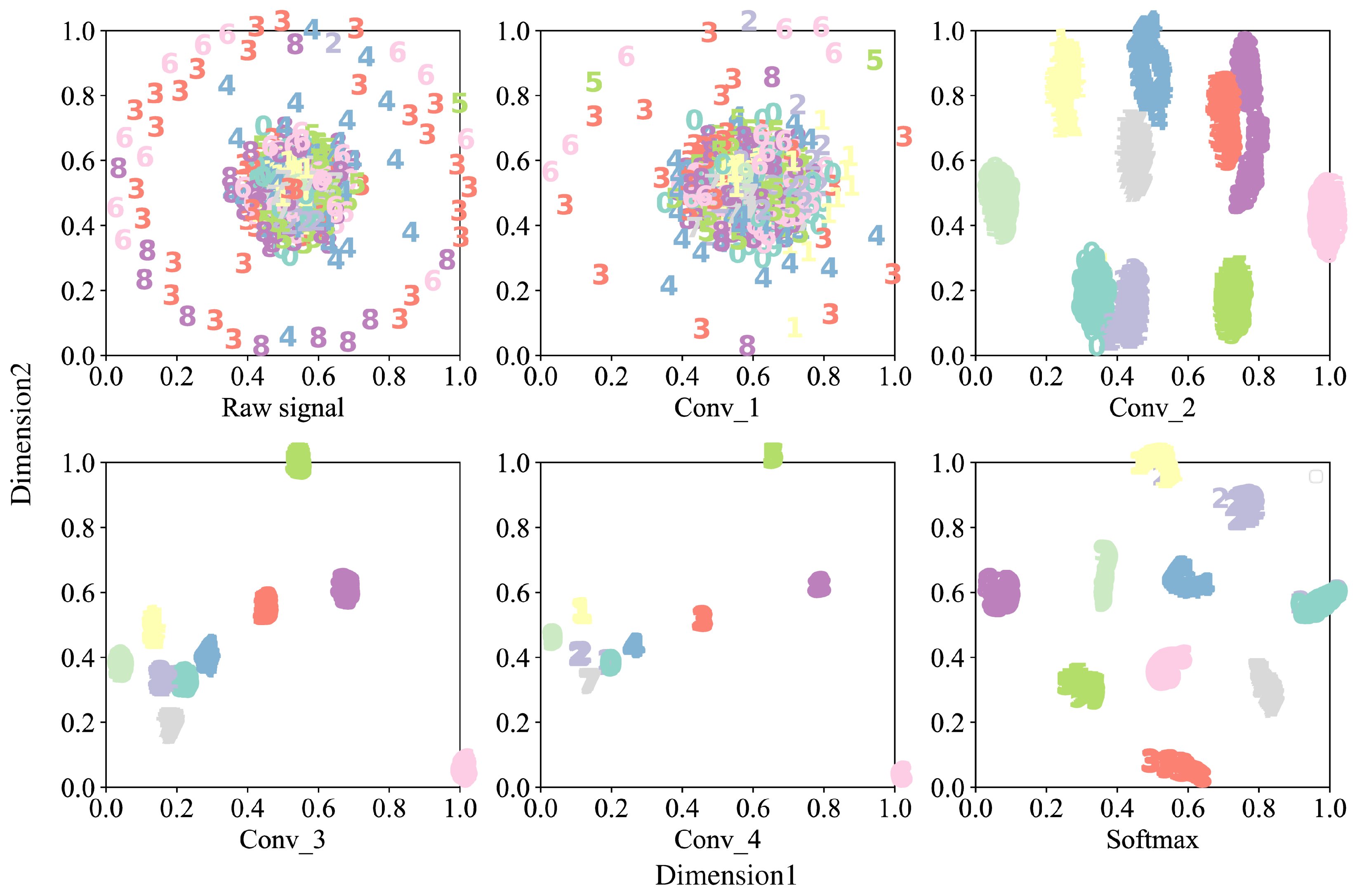
3.7. Visual Analysis of Features
4. Conclusions
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
References
- Xu, X.; Qiao, X.; Zhang, N.; Feng, J.; Wang, X. Review of intelligent fault diagnosis for permanent magnet synchronous motors in electric vehicles. Adv. Mech. Eng. 2020, 12, 1687814020944323. [Google Scholar] [CrossRef]
- Asr, M.Y.; Ettefagh, M.M.; Hassannejad, R.; Razavi, S.N. Diagnosis of combined faults in rotary machinery by non-naive Bayesian approach. Mech. Syst. Signal Process. 2017, 85, 56–70. [Google Scholar] [CrossRef]
- Jiang, X.; Li, S.; Cheng, C. A novel method for adaptive multi resonance bands detection based on VMD and using MTEO to enhance rolling element bearing fault diagnosis. Shock Vib. 2016, 2016, 8361289. [Google Scholar]
- Ali, J.B.; Fnaiech, N.; Saidi, L.; Chebel-Morello, B.; Fnaiech, F. Application of empirical mode decomposition and artificial neural network for automatic bearing fault diagnosis based on vibration signals. Appl. Acoust. 2015, 89, 16–27. [Google Scholar]
- Santos, P.; Villa, L.F.; Reñones, A.; Bustillo, A.; Maudes, J. An SVM-based solution for fault detection in wind turbines. Sensors 2015, 15, 5627–5648. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Shevchik, S.A.; Saeidi, F.; Meylan, B.; Wasmer, K. Prediction of failure in lubricated surfaces using acoustic time-frequency features and random forest algorithm. IEEE Trans. Ind. Inform. 2016, 13, 1541–1553. [Google Scholar] [CrossRef]
- Lei, Y.; Jia, F.; Lin, J.; Xing, S.; Ding, S.X. An intelligent fault diagnosis method using unsupervised feature learning towards mechanical big data. IEEE Trans. Ind. Electron. 2016, 63, 3137–3147. [Google Scholar] [CrossRef]
- He, M.; He, D. Deep learning based approach for bearing fault diagnosis. IEEE Trans. Ind. Appl. 2017, 53, 3057–3065. [Google Scholar] [CrossRef]
- Jing, L.; Zhao, M.; Li, P.; Xu, X. A convolutional neural network based feature learning and fault diagnosis method for the condition monitoring of gear-box. Measurement 2017, 111, 1–10. [Google Scholar] [CrossRef]
- Wang, N.; Ma, P.; Zhang, H.; Wang, C. Fault diagnosis of rolling bearing based on feature fusion of multi-scale deep convolutional network. Acta Energiae Solaris Sin. 2022, 43, 351–358. [Google Scholar]
- Zhang, W.; Peng, G.; Li, C.; Chen, Y.; Zhang, Z. A new deep learning model for fault diagnosis with good anti-noise and domain adaptation ability on raw vibration signals. Sensors 2017, 17, 425. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Gao, Y.; Kim, C.H.; Kim, J.M. A novel hybrid deep learning method for fault diagnosis of rotating machinery based on extended WDCNN and long short-term memory. Sensors 2021, 21, 6614. [Google Scholar] [CrossRef] [PubMed]
- Han, T.; Liu, C.; Wu, L.; Sarkar, S.; Jiang, D. An adaptive spatiotemporal feature learning approach for fault diagnosis in complex systems. Mech. Syst. Signal Process. 2019, 117, 170–187. [Google Scholar] [CrossRef]
- Jiang, G.; He, H.; Yan, J.; Xie, P. Multiscale convolutional neural networks for fault diagnosis of wind turbine gearbox. IEEE Trans. Ind. Electron. 2018, 66, 3196–3207. [Google Scholar] [CrossRef]
- Hao, X.; Zheng, Y.; Lu, L.; Pan, H. Research on Intelligent Fault Diagnosis of Rolling Bearing Based on Improved Deep Residual Network. Appl. Sci. 2021, 11, 10889. [Google Scholar] [CrossRef]
- Vaswani, A.; Shazeer, N.; Parmar, N.; Uszkoreit, J.; Jones, L.; Gomez, A.N.; Kaiser, Ł.; Polosukhin, I. Attention is all you need. Adv. Neural Inf. Process. Syst. 2017, 30, 6000–6010. [Google Scholar]
- Hu, J.; Shen, L.; Sun, G. Squeeze-and-excitation networks. In Proceedings of the IEEE Conference on Computer Vision and Pattern Recognition, Salt Lake City, UT, USA, 18–23 June 2018; pp. 7132–7141. [Google Scholar]
- Wang, Y.; Song, X.; Chen, K. Channel and space attention neural network for image denoising. IEEE Signal Process. Lett. 2021, 28, 424–428. [Google Scholar] [CrossRef]
- Simonyan, K.; Zisserman, A. Very deep convolutional networks for large-scale image recognition. arXiv 2014, arXiv:1409.1556. [Google Scholar]
- Smith, W.A.; Randall, R.B. Rolling element bearing diagnostics using the Case Western Reserve University data: A benchmark study. Mech. Syst. Signal Process. 2015, 64, 100–131. [Google Scholar] [CrossRef]
- Chen, C.C.; Liu, Z.; Yang, G.; Wu, C.C.; Ye, Q. An improved fault diagnosis using 1D-convolutional neural network model. Electronics 2020, 10, 59. [Google Scholar] [CrossRef]
- Wang, H.; Xu, J.; Yan, R.; Sun, C.; Chen, X. Intelligent bearing fault diagnosis using multi-head attention-based CNN. Procedia Manuf. 2020, 49, 112–118. [Google Scholar] [CrossRef]
- Ding, X.; He, Q. Energy-fluctuated multiscale feature learning with deep convnet for intelligent spindle bearing fault diagnosis. IEEE Trans. Instrum. Meas. 2017, 66, 1926–1935. [Google Scholar] [CrossRef]
- Pezzotti, N.; Lelieveldt, B.P.; Van Der Maaten, L.; Höllt, T.; Eisemann, E.; Vilanova, A. Approximated and user steerable tSNE for progressive visual analytics. IEEE Trans. Vis. Comput. Graph. 2016, 23, 1739–1752. [Google Scholar] [CrossRef] [PubMed]












{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| No | Layer | Kernel | Channel | Stride | Padding | Activation | Output |
|---|---|---|---|---|---|---|---|
| 1 | Input | - | - | - | - | - | (None, 1024, 1) |
| 2 | Conv_1 | 128 × 1 | 32 | 8 × 1 | Yes | ReLU | (None, 128, 32) |
| 3 | CA_1 | - | - | - | - | - | (None, 128, 32) |
| 4 | MaxPooling_1 | 2 × 1 | - | 2 × 1 | No | - | (None, 64, 32) |
| 5 | Conv_2 | 9 × 1 | 64 | 1 × 1 | Yes | ReLU | (None, 64, 64) |
| 6 | CA_2 | - | - | - | - | - | (None, 64, 64) |
| 7 | MaxPooling_2 | 2 × 1 | - | 2 × 1 | No | - | (None, 32, 64) |
| 8 | Conv_3 | 6 × 1 | 64 | 1 × 1 | Yes | ReLU | (None, 32, 64) |
| 9 | CA_3 | - | - | - | - | - | (None, 32, 64) |
| 10 | MaxPooling_3 | 2 × 1 | - | 2 × 1 | No | - | (None, 16, 64) |
| 11 | Conv_4 | 3 × 1 | 64 | 1 × 1 | Yes | ReLU | (None, 16, 64) |
| 12 | GAP | - | - | - | - | - | (None, 64) |
| 13 | Softmax | - | 10 | - | - | Softmax | (None, 10) |
| Status | Labels | |||||||||
|---|---|---|---|---|---|---|---|---|---|---|
| 0 | 1 | 2 | 3 | 4 | 5 | 6 | 7 | 8 | 9 | |
| Location | BF | BF | BF | IF | IF | IF | OF | OF | OF | N |
| Size (mm) | 0.18 | 0.36 | 0.54 | 0.18 | 0.36 | 0.54 | 0.18 | 0.36 | 0.54 | - |
| No | Layer | Kernel | Channel | Stride | Padding | Activation |
|---|---|---|---|---|---|---|
| 1 | Conv_1 | 128 × 1 | 32 | 8 × 1 | Yes | ReLU |
| 2 | MaxPooling_1 | 2 × 1 | - | 2 × 1 | No | - |
| 3 | Conv_2 | 9 × 1 | 64 | 1 × 1 | Yes | ReLU |
| 4 | MaxPooling_2 | 2 × 1 | - | 2 × 1 | No | - |
| 5 | Conv_3 | 6 × 1 | 64 | 1 × 1 | Yes | ReLU |
| 6 | MaxPooling_3 | 2 × 1 | - | 2 × 1 | No | - |
| 7 | Conv_4 | 3 × 1 | 64 | 1 × 1 | Yes | ReLU |
| 8 | GAP | - | - | - | - | - |
| 9 | Softmax | - | 10 | - | - | Softmax |
| Model | 0 HP (%) | 1 HP (%) | 2 HP (%) | 3 HP (%) | Avg (%) |
|---|---|---|---|---|---|
| RF | 0.750 | 0.767 | 0.790 | 0.817 | 0.781 |
| SVM | 0.789 | 0.685 | 0.709 | 0.762 | 0.736 |
| 1D-CNN | 0.993 | 0.976 | 0.995 | 0.999 | 0.991 |
| MA-CNN | 0.994 | 0.994 | 0.998 | 0.999 | 0.997 |
| WPE-CNN | 0.988 | 0.988 | 0.994 | 0.994 | 0.991 |
| CNN | 0.978 | 0.987 | 0.990 | 0.980 | 0.984 |
| CA-CNN | 0.999 | 0.992 | 0.999 | 0.999 | 0.998 |
| FMCNN | WDCNN | 1D-CNN | CNN | CA-CNN | |
|---|---|---|---|---|---|
| Highest accuracy (%) | 0.994 | 0.998 | 0.951 | 0.994 | 0.997 |
| Lowest accuracy (%) | 0.809 | 0.609 | 0.148 | 0.551 | 0.752 |
| Average (%) | 0.930 | 0.898 | 0.619 | 0.871 | 0.943 |
| Time (s) | 158 | 54 | 1333 | 59 | 86 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Yin, J.; Cen, G. Intelligent Motor Bearing Fault Diagnosis Using Channel Attention-Based CNN. World Electr. Veh. J. 2022, 13, 208. https://doi.org/10.3390/wevj13110208
Yin J, Cen G. Intelligent Motor Bearing Fault Diagnosis Using Channel Attention-Based CNN. World Electric Vehicle Journal. 2022; 13(11):208. https://doi.org/10.3390/wevj13110208
Chicago/Turabian StyleYin, Jianguo, and Gang Cen. 2022. "Intelligent Motor Bearing Fault Diagnosis Using Channel Attention-Based CNN" World Electric Vehicle Journal 13, no. 11: 208. https://doi.org/10.3390/wevj13110208