

Comparative Analysis and Design of Double-Rotor Stator-Permanent-Magnet Motors with Magnetic-Differential Application for Electric Vehicles


Abstract
:1. Introduction
- Provided a review of major differential systems in the market and discussed both their pros and cons;
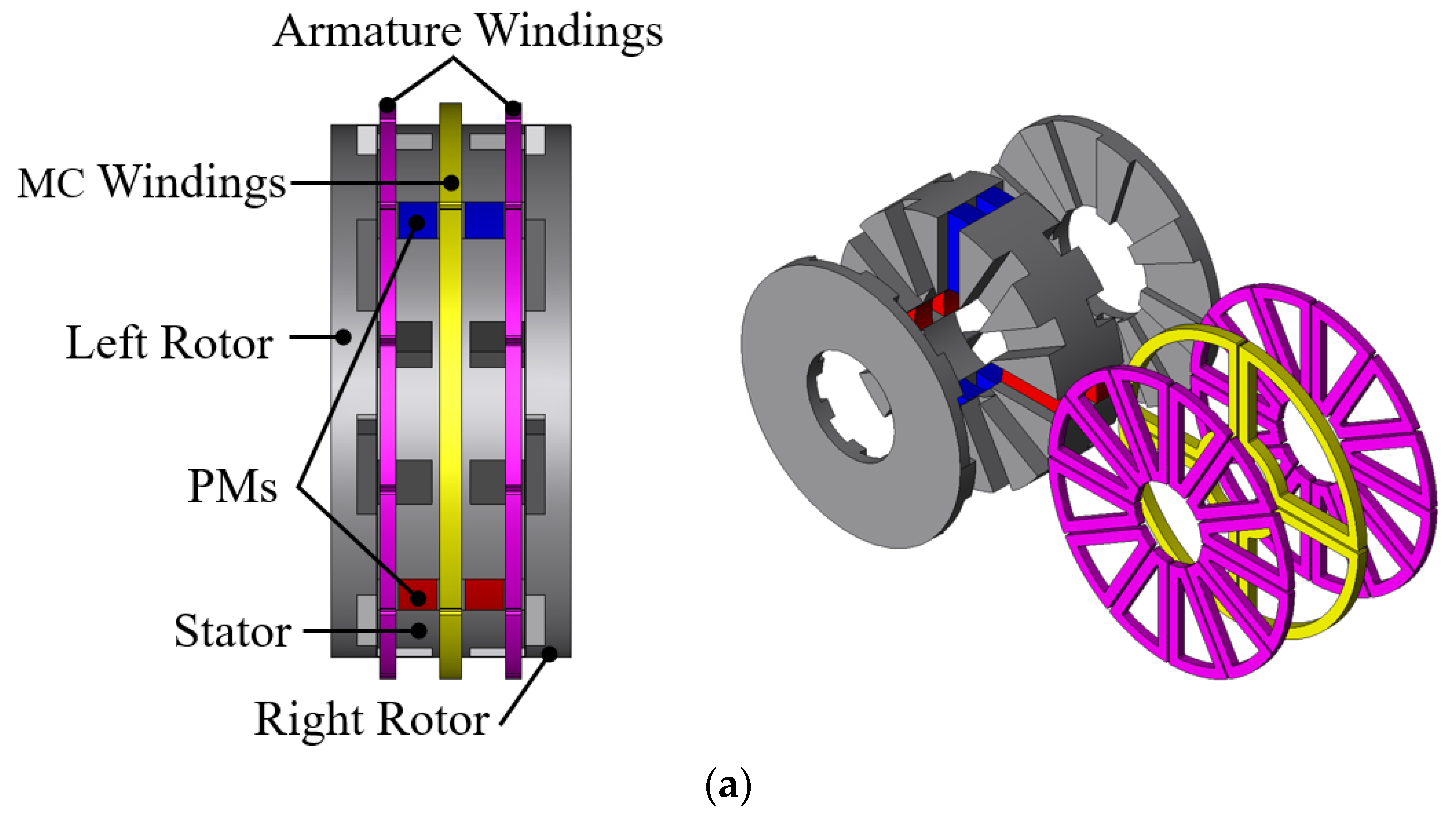
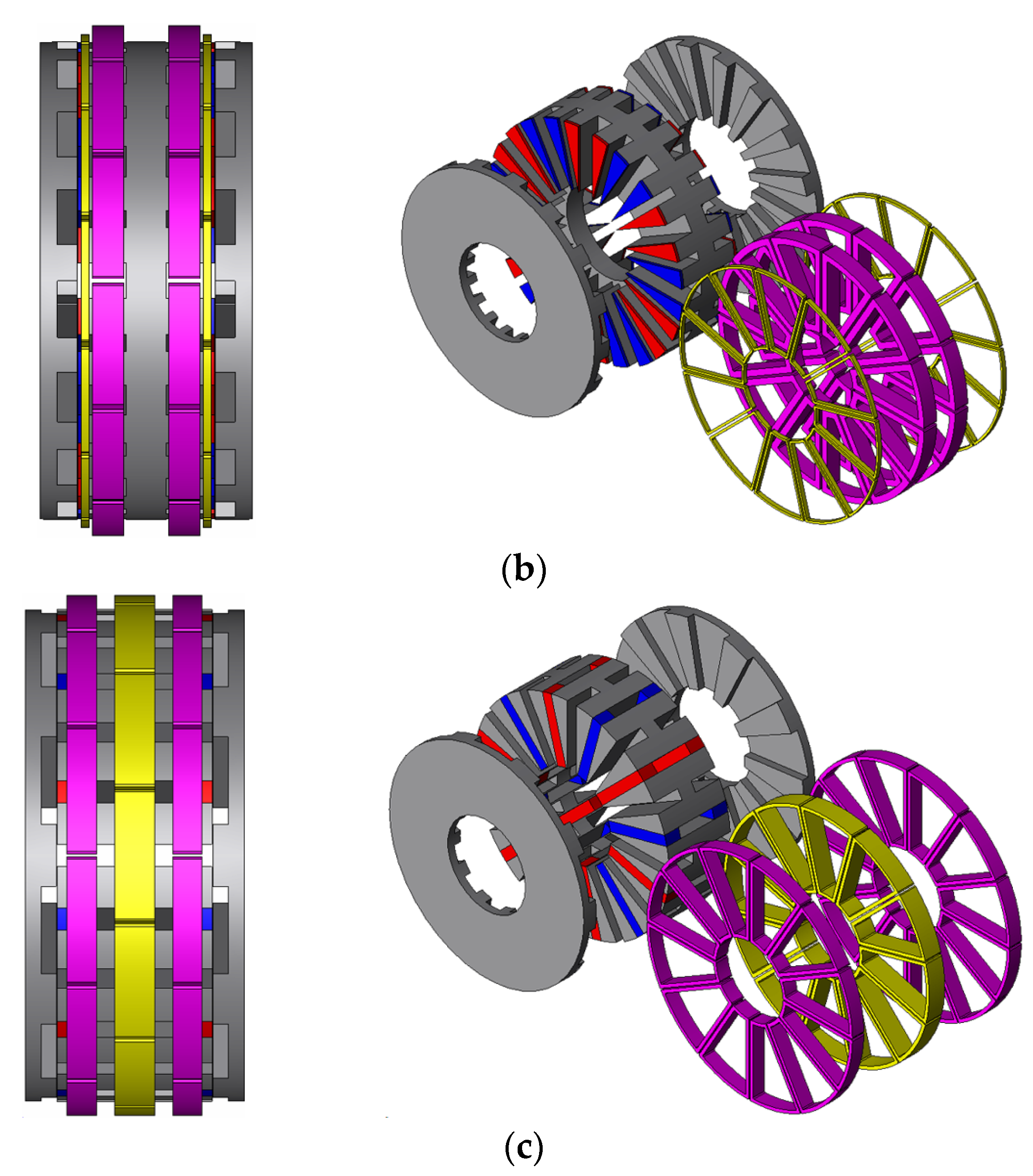
- Proposed two novel motors for MagD systems, namely, the DSPM and FRPM motors with MC windings tactfully located in the motors;
- Thoroughly investigated the performances of three major types of stator-PM motors for the MagD application by using the 3D FEA simulation;
- Compared three motors and suggested suitable motor types on the basis of various application scenarios;
- Fabricated a motor prototype to conduct experimentations to validate the aforementioned theoretical analysis and simulation.
2. Motor Structures, Operation Principles, and Optimization
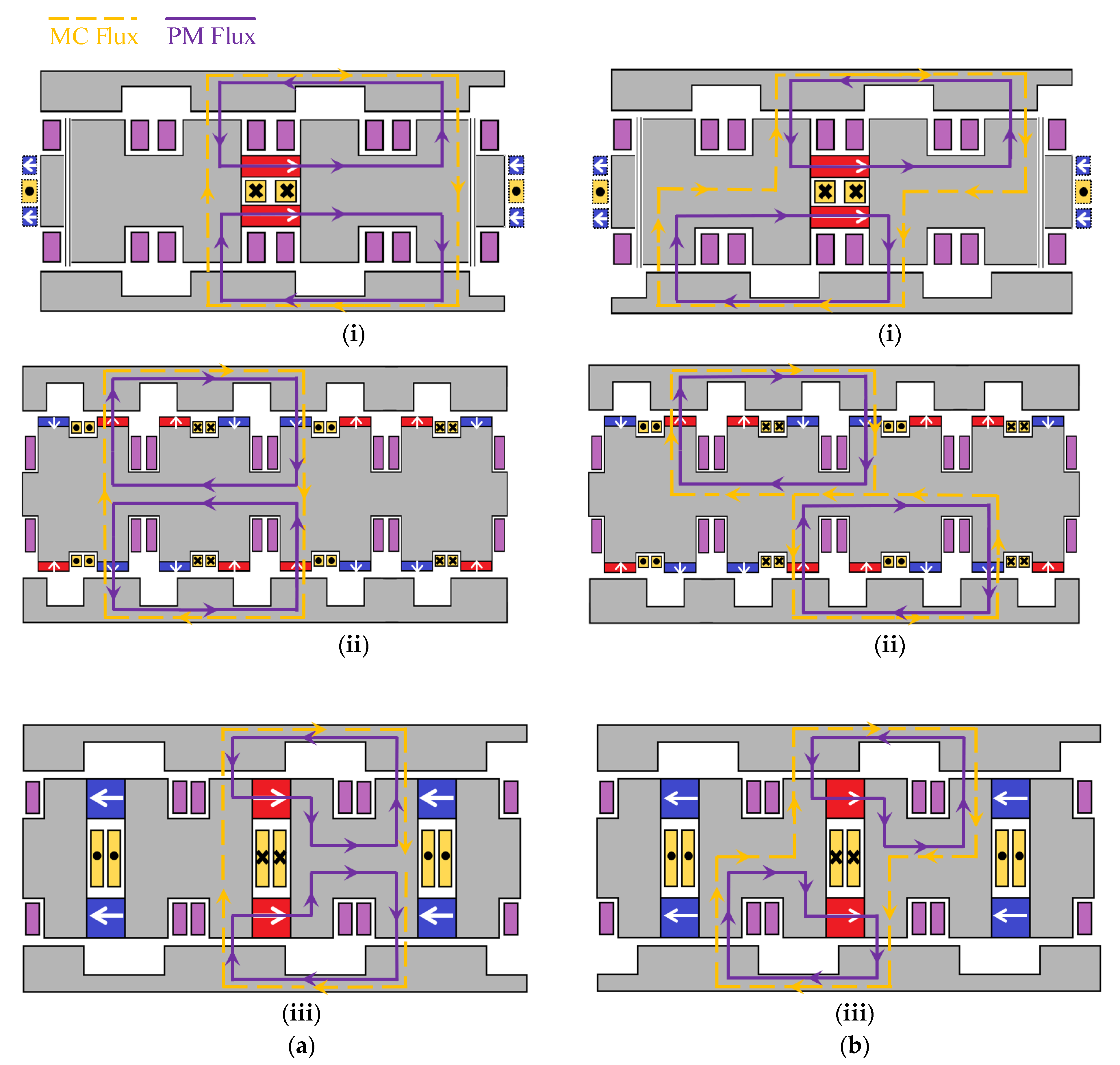
2.1. Topologies and Operation Principles
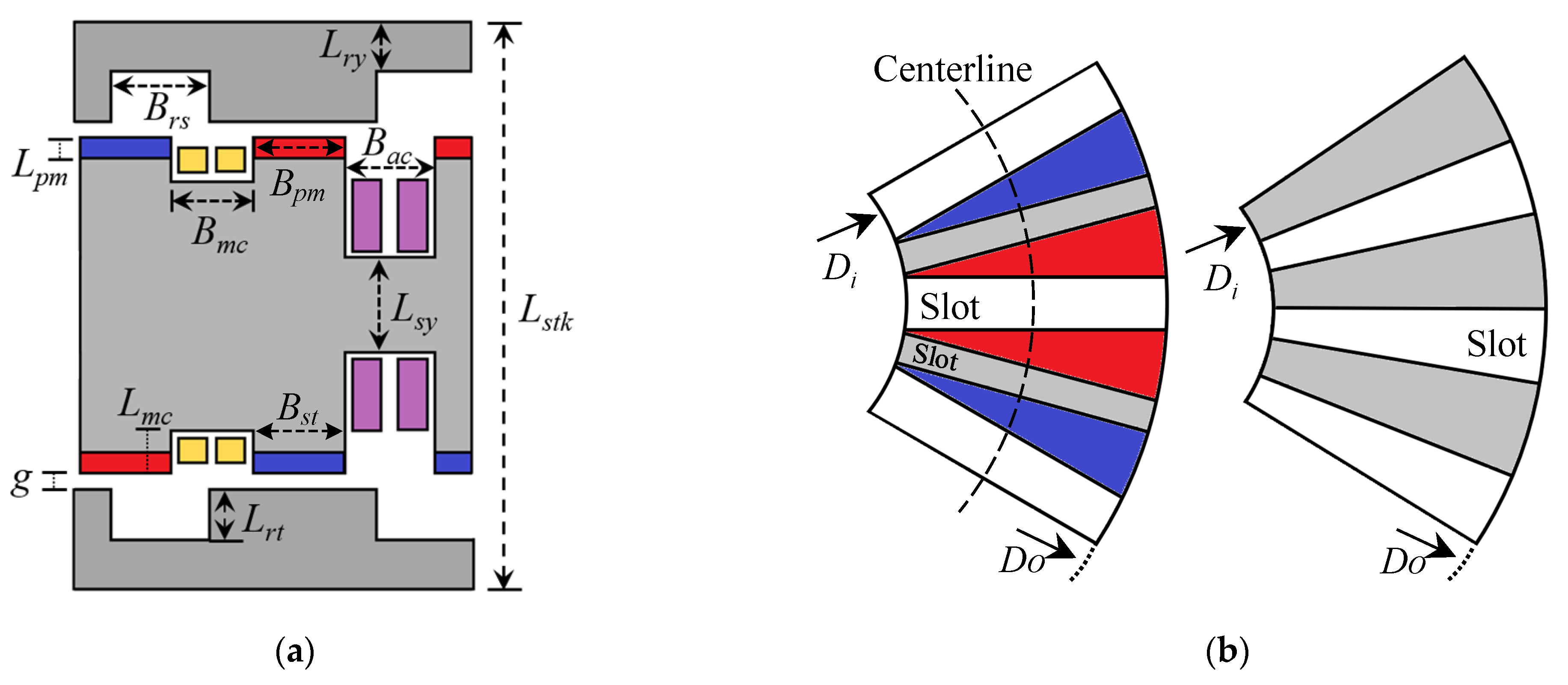
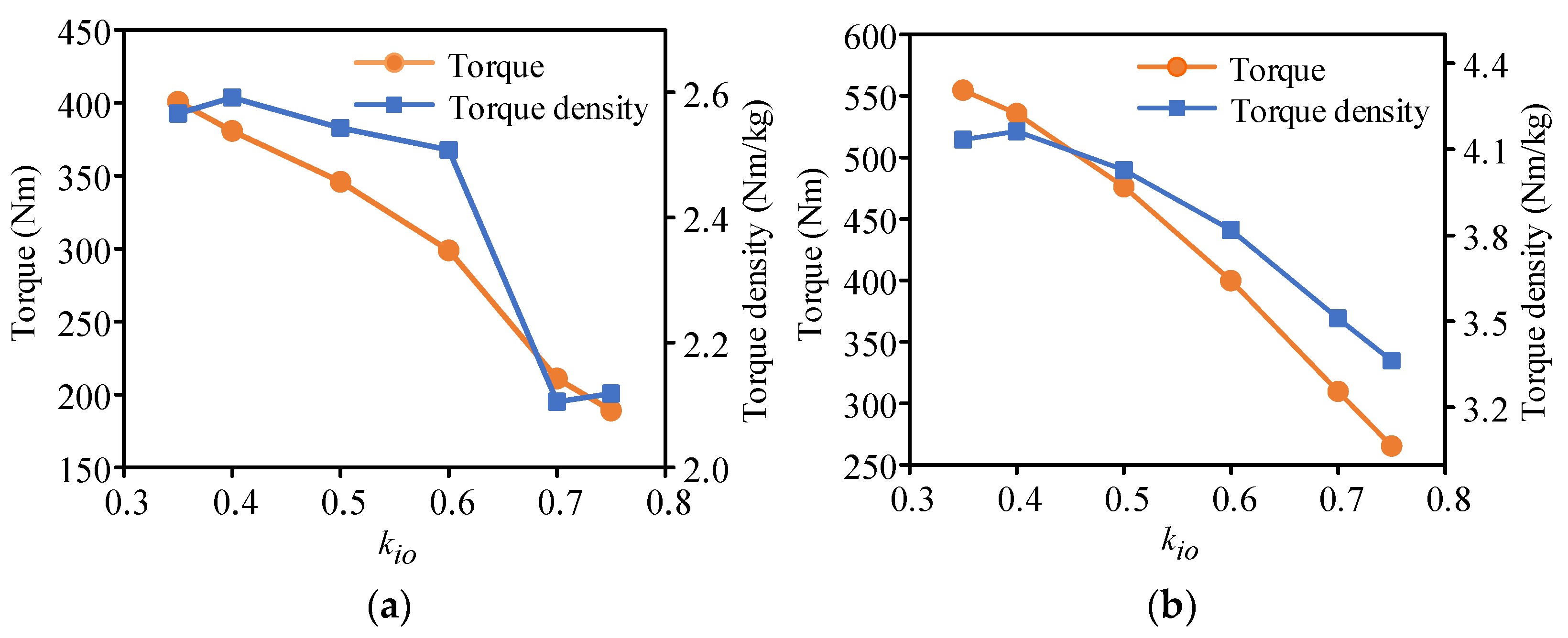
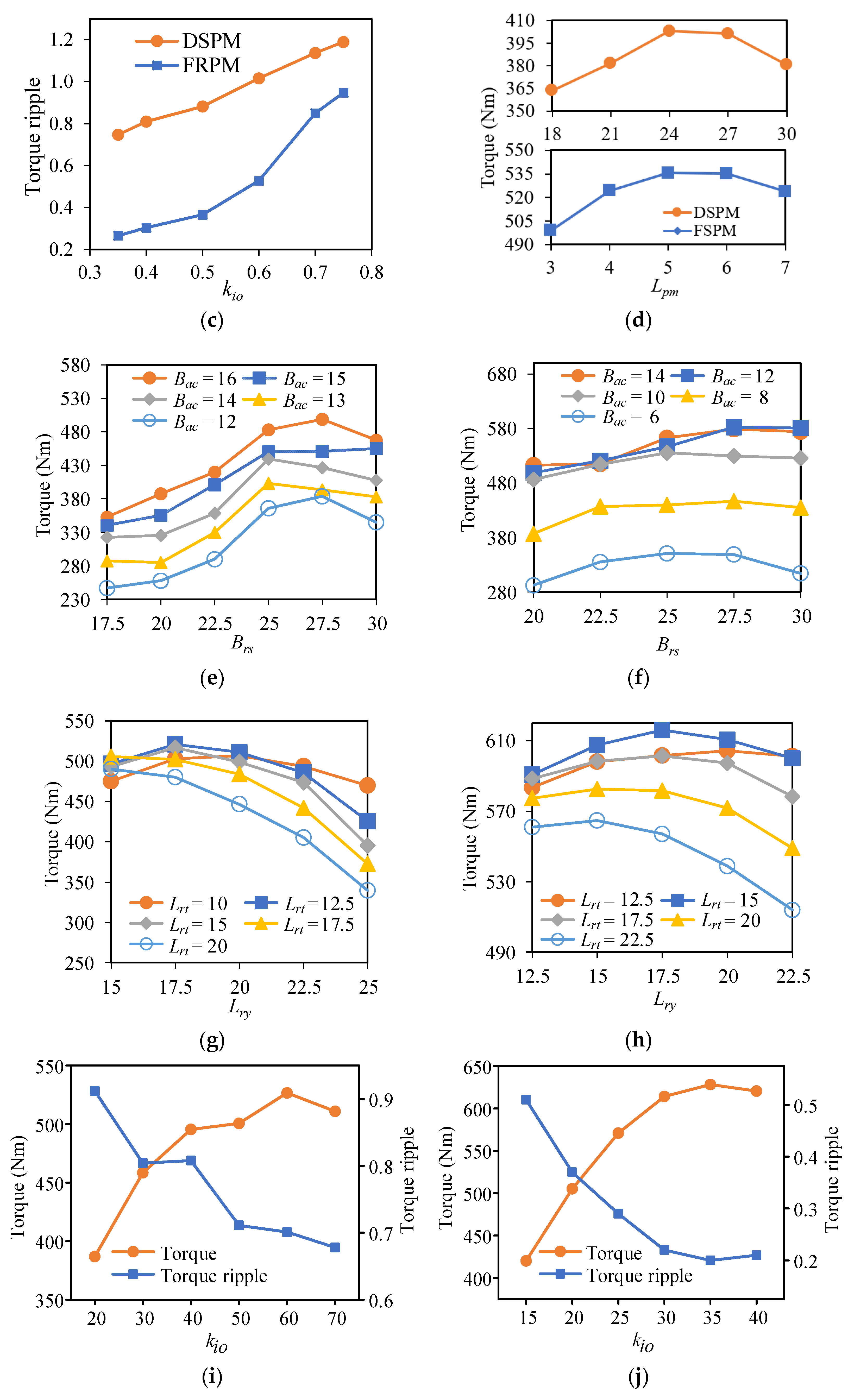
2.2. Optimization
3. Comparison of Motor Performance
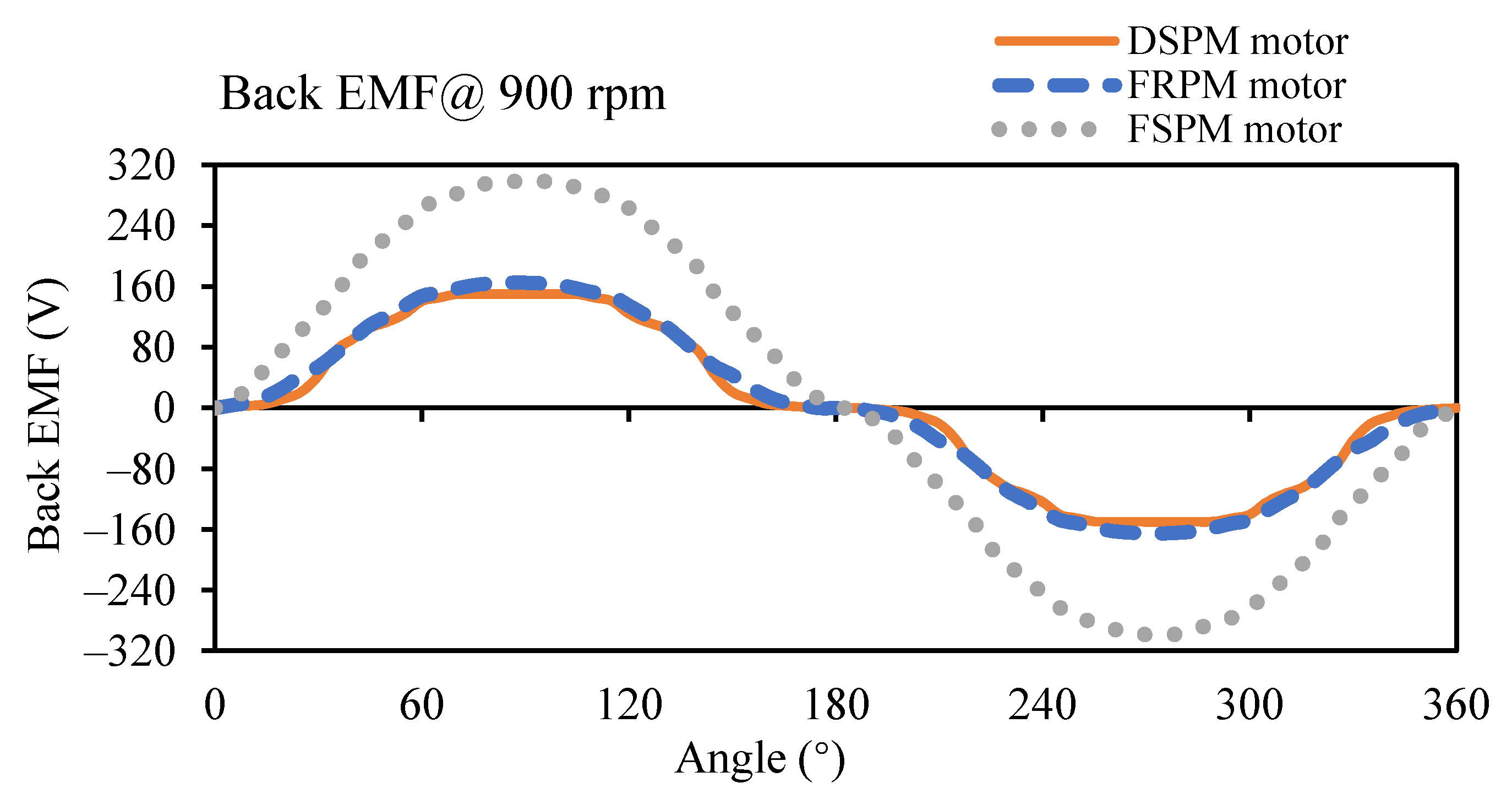
3.1. No-Load EMF
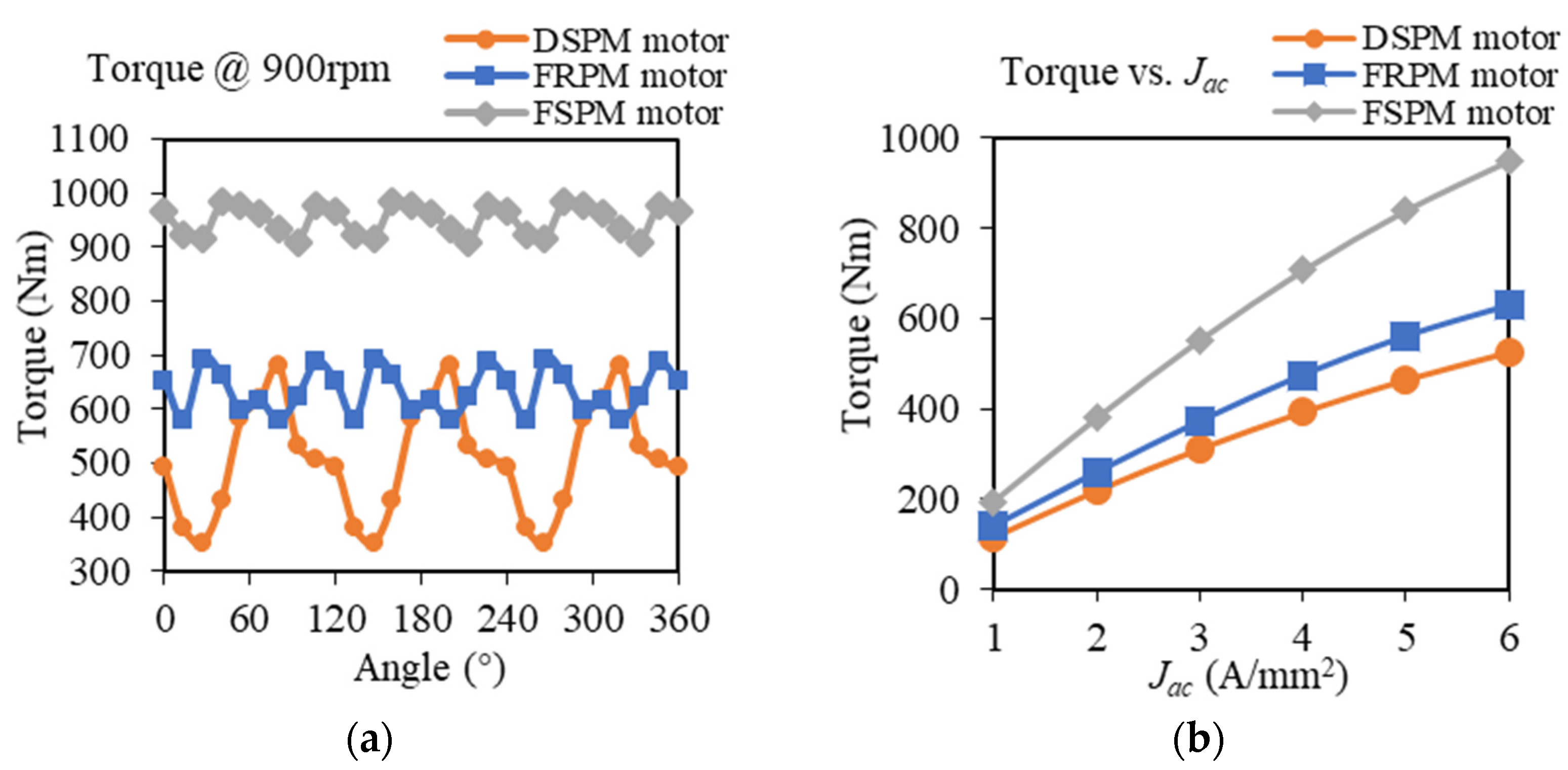
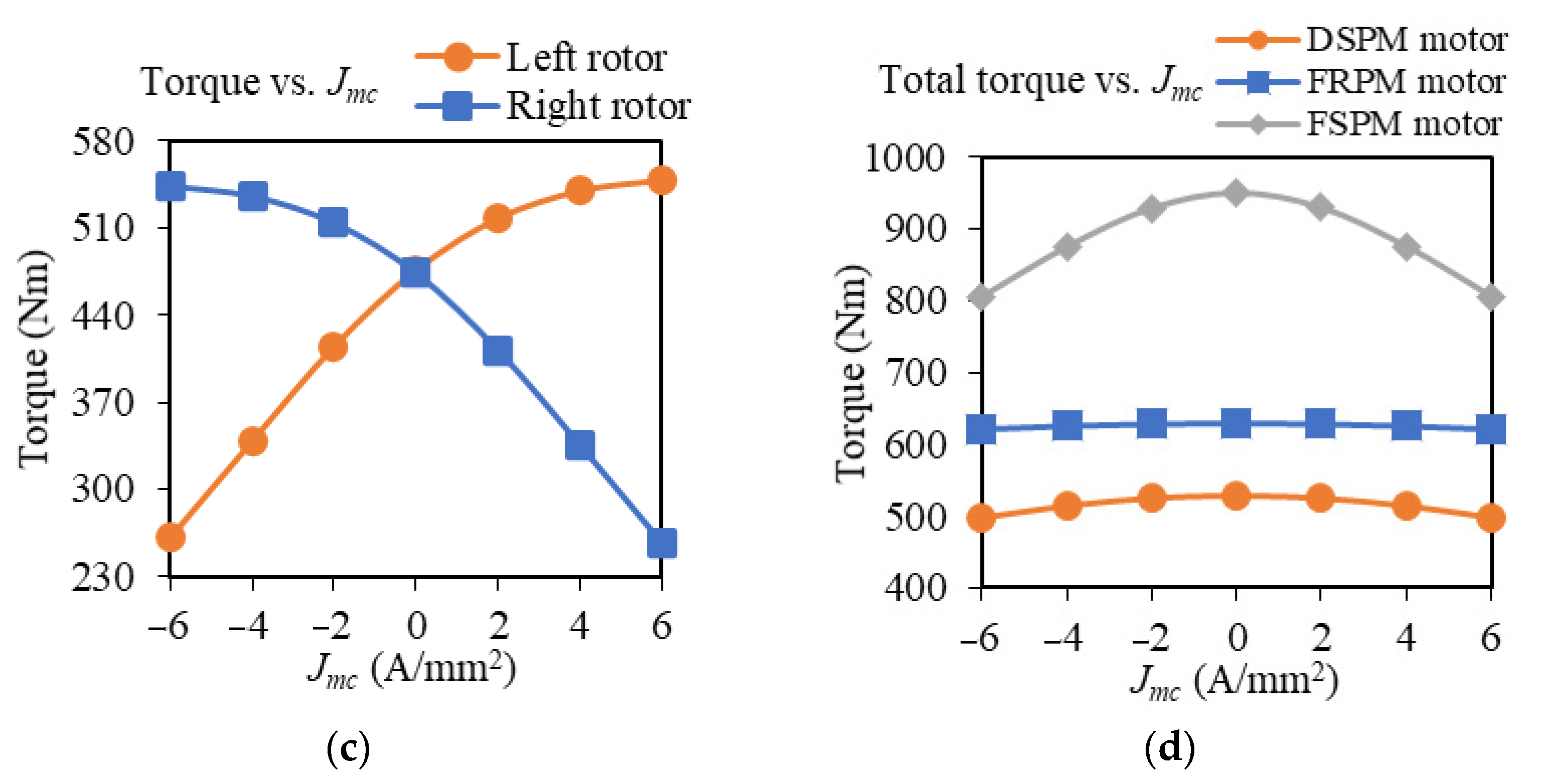
3.2. Electromagnetic Torque
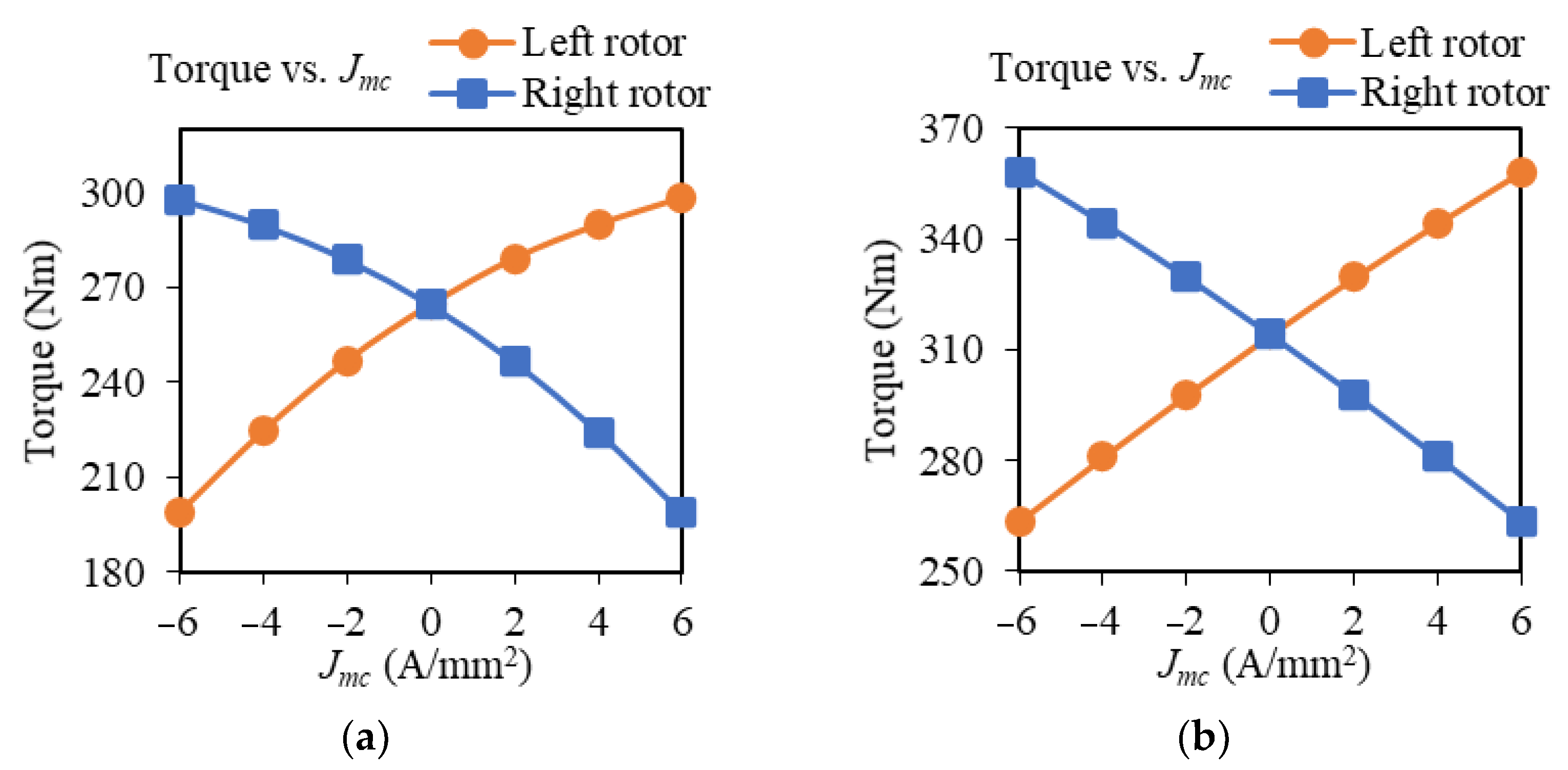
3.3. Differential Torque
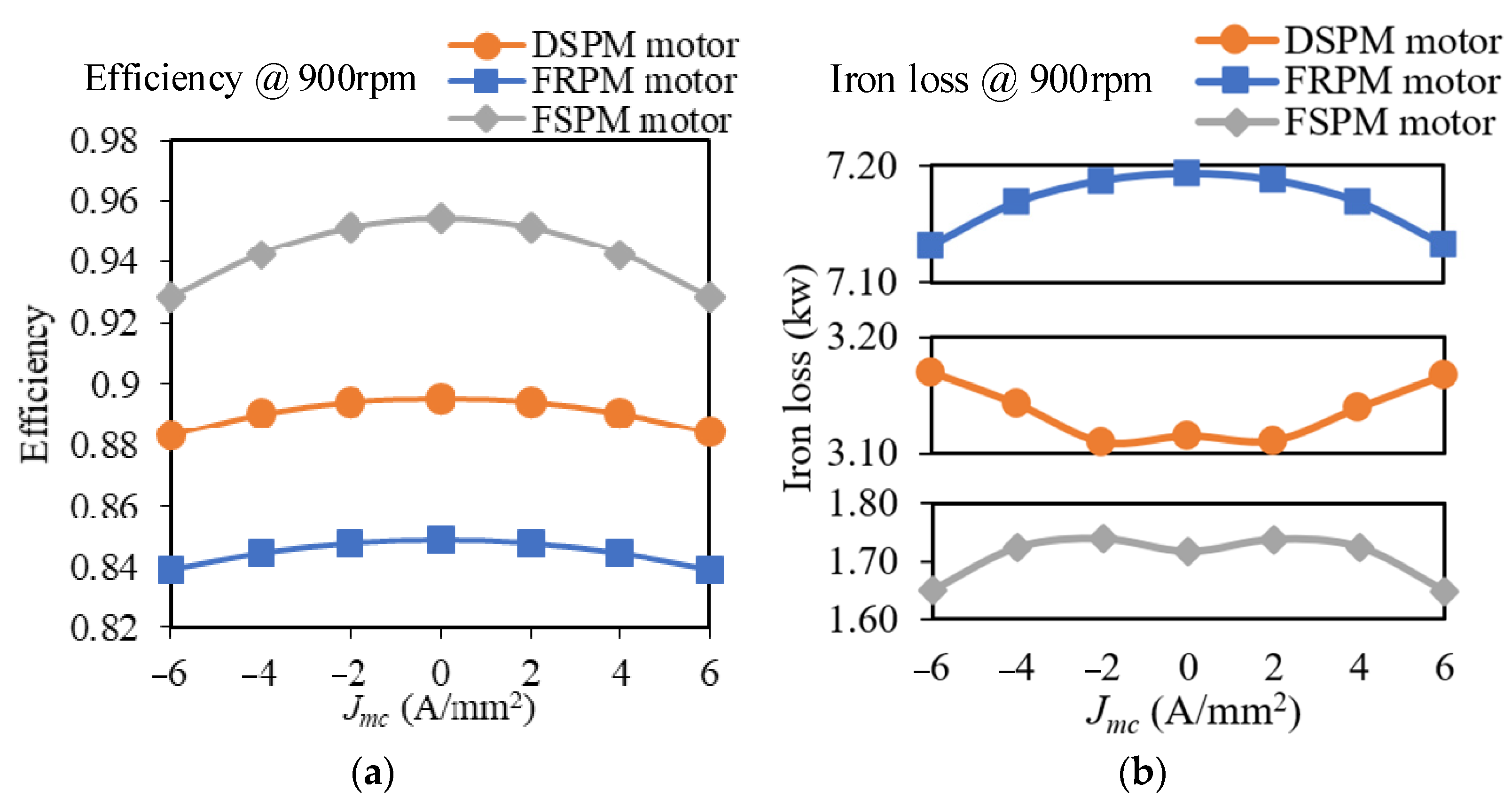
3.4. Efficiency and Loss
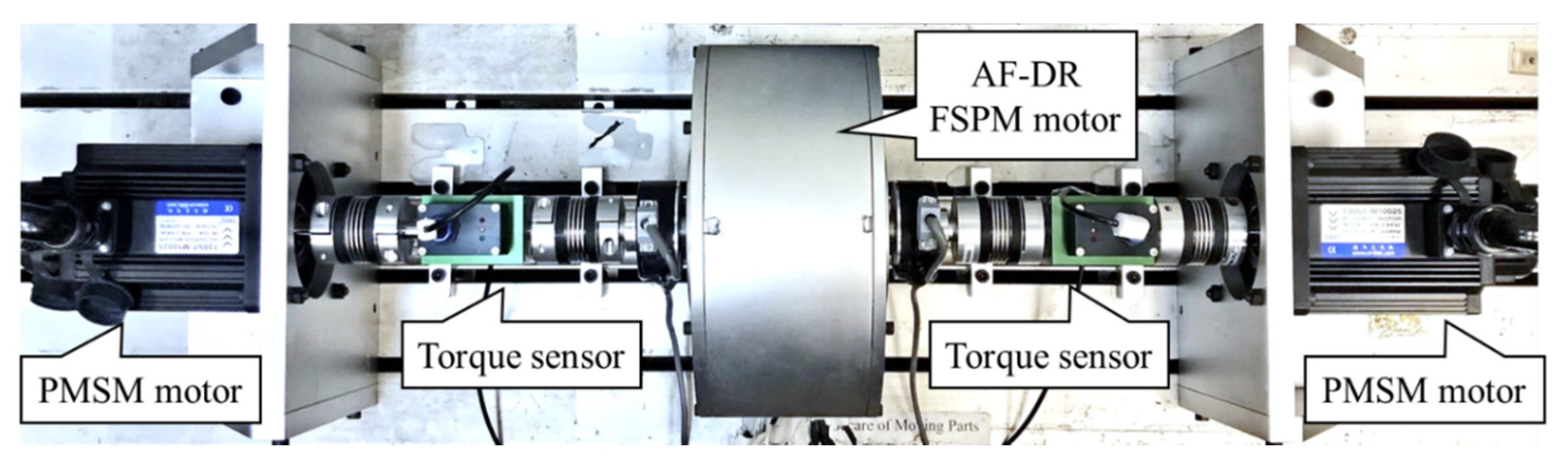
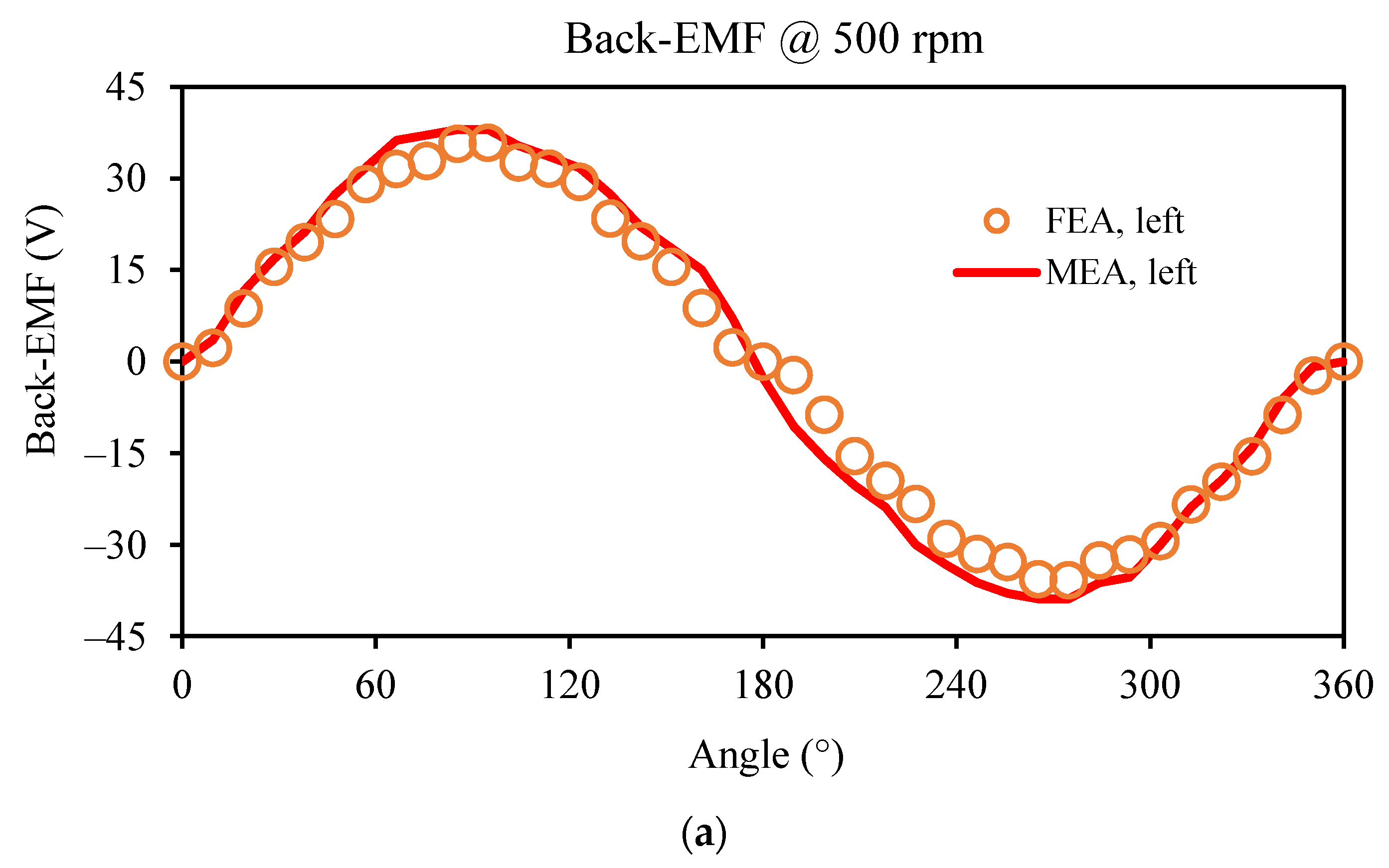
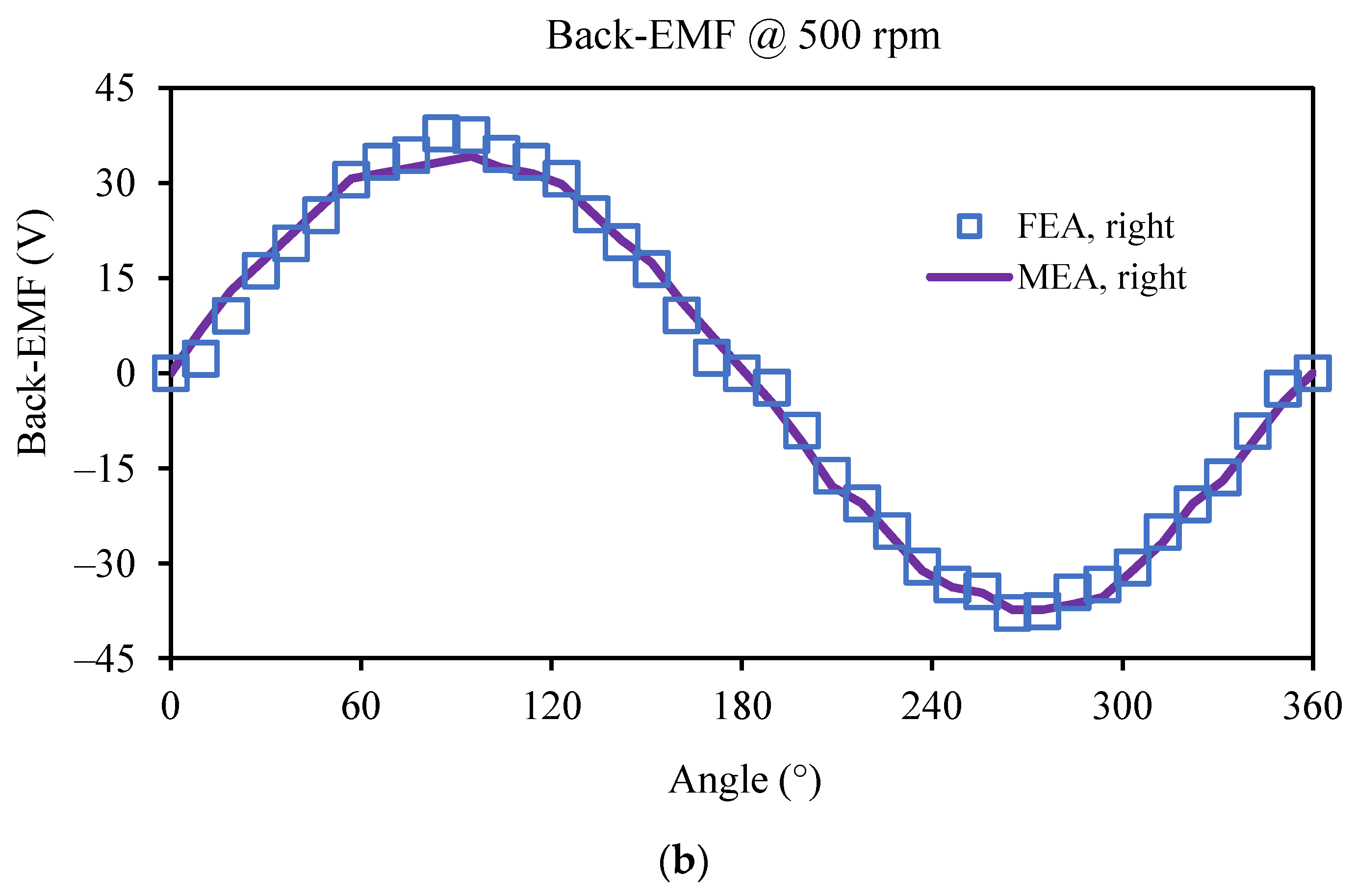
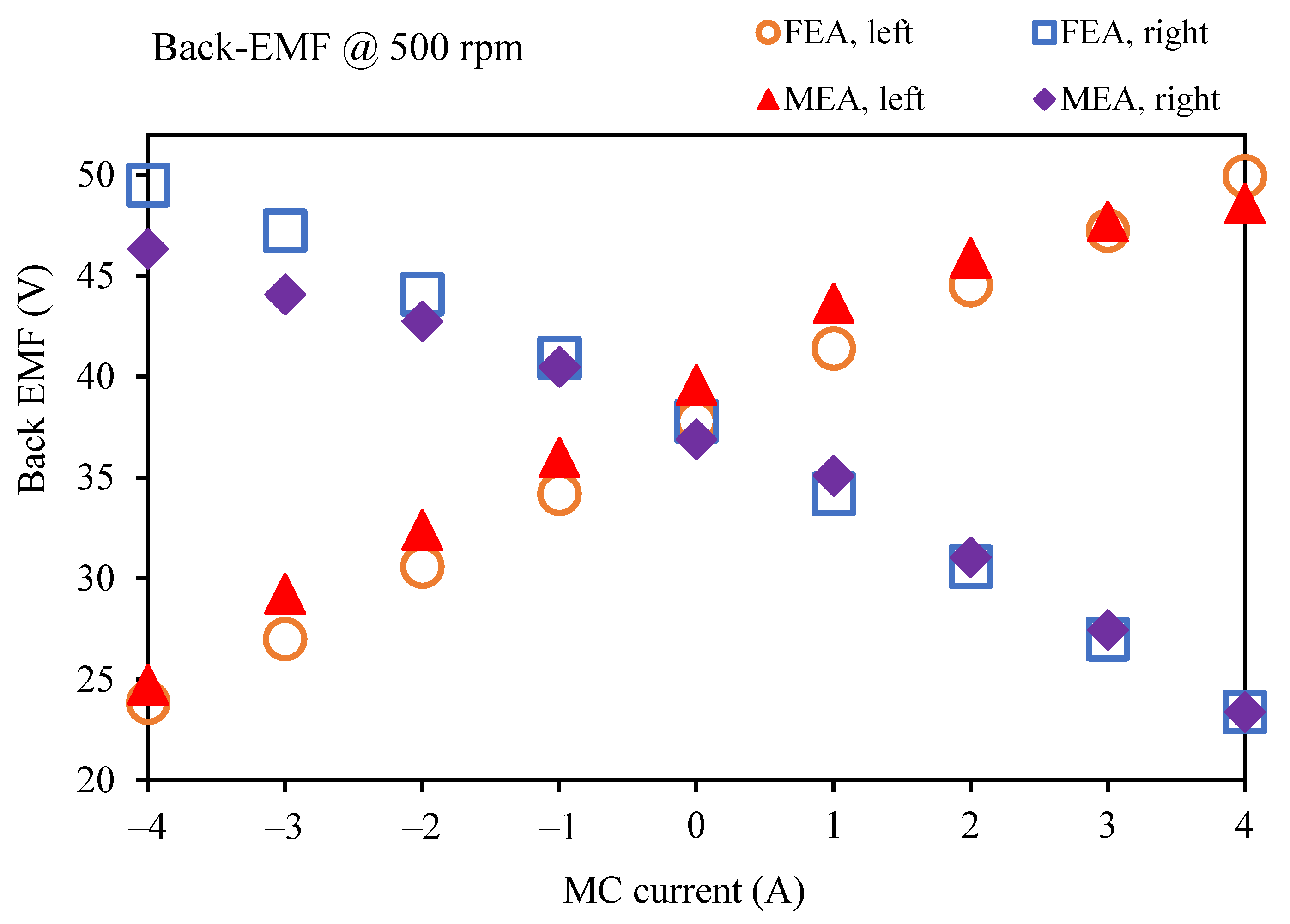
4. Experimental Results
5. Conclusions
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
References
- Liu, C.; Chau, K.T.; Zhong, J. Development of a smart DC micro-grid for plug-in electric vehicle charging and discharging. World Electr. Veh. J. 2010, 4, 939–942. [Google Scholar] [CrossRef] [Green Version]
- Zhang, X.; Kan, T.; You, C.; Mi, C. Modeling and analysis of AC output power factor for wireless chargers in electric vehicles. IEEE Trans. Power Electron. 2017, 32, 1481–1492. [Google Scholar] [CrossRef]
- Yu, P.; Li, M.; Wang, Y.; Chen, Z. Fuel cell hybrid electric vehicles: A review of topologies and energy management strategies. World Electr. Veh. J. 2022, 13, 172. [Google Scholar] [CrossRef]
- Mopidevi, S.; Narasipuram, R.P.; Aemalla, S.R.; Rajan, H. E-mobility: Impacts and analysis of future transportation electrification market in economic, renewable energy and infrastructure perspective. Int. J. Powertrains 2022, 11, 264–284. [Google Scholar] [CrossRef]
- Narasipuram, R.P.; Mopidevi, S. A technological overview & design considerations for developing electric vehicle charging stations. J. Energy Storage 2021, 143, 103225. [Google Scholar]
- Liu, W.; Chau, K.T.; Lam, W.H.; Zhang, Z. Continuously variable-frequency energy-encrypted wireless power transfer. Energies 2019, 12, 1286. [Google Scholar] [CrossRef] [Green Version]
- Lee, C.H.T.; Liu, C.; Chau, K.T. A magnetless axial-flux machine for range-extended electric vehicle. Energies 2014, 7, 1483–1499. [Google Scholar] [CrossRef] [Green Version]
- Evans, J.D.; Zhu, Z.Q. Novel partitioned stator switched flux permanent magnet machines. IEEE Trans. Magn. 2015, 51, 8100114. [Google Scholar] [CrossRef]
- Liu, Y.; Ho, S.L.; Fu, W.N.; Zhang, X. Design optimization of a novel doubly fed dual-rotor flux-modulated machine for hybrid electric vehicles. IEEE Trans. Magn. 2015, 51, 8101604. [Google Scholar]
- Wang, Y.; Cheng, M.; Chen, M.; Du, Y.; Chau, K.T. Design of high-torque-density double-stator permanent magnet brushless motors. IET Electr. Power Appl. 2011, 5, 317–323. [Google Scholar] [CrossRef]
- He, T.; Zhu, Z.Q.; Eastham, F.; Wang, Y.; Bin, H.; Wu, D.; Gong, L.; Chen, J. Permanent magnet machines for high-speed applications. World Electr. Veh. J. 2022, 13, 18. [Google Scholar] [CrossRef]
- Forstinger, M.; Bauer, R.; Hofer, A. Modelling and simulation of passive limited-slip differentials. IFAC-PapersOnLine 2015, 48, 502–507. [Google Scholar] [CrossRef]
- Fijalkowski, B.T. Electro-mechanical differentials for reduction of self-generated wind-up torques in DBW AWD propulsion mechatronic control systems. World Electr. Veh. J. 2009, 3, 606–617. [Google Scholar] [CrossRef] [Green Version]
- Li, C.Q.; Zhou, C.Y. Analysis on electronic differential control strategies of electric vehicle. Adv. Mater. Res. 2012, 562–564, 1602–1605. [Google Scholar] [CrossRef]
- Zhang, W.; Liu, Z.; Chen, Q. Electronic differential system based on adaptive SMC combined with QP for 4WID electric vehicles. World Electr. Veh. J. 2021, 12, 126. [Google Scholar] [CrossRef]
- Yang, T.; Chau, K.T.; Ching, T.W.; Zhao, H.; Wang, H. A magnetic-differential double-rotor flux-reversal permanent-magnet motor for electric vehicles. In Proceedings of the 2021 24th International Conference on Electrical Machines and Systems (ICEMS), Gyeongju, Korea, 31 October–3 November 2021; pp. 1228–1232. [Google Scholar]
- Cao, L.; Chau, K.T.; Lee, C.H.T.; Wang, H. A double-rotor flux-switching permanent-magnet motor for electric vehicles with magnetic differential. IEEE Trans. Ind. Electron. 2021, 68, 1004–1015. [Google Scholar] [CrossRef]
- Cheng, M.; Hua, W.; Zhang, J.; Zhao, W. Overview of stator-permanent magnet brushless machines. IEEE Trans. Ind. Electron. 2011, 58, 5087–5101. [Google Scholar] [CrossRef]
- Huang, L.; Zhu, Z.Q.; Feng, J.; Guo, S.; Shi, J.X.; Chu, W. Analysis of stator/rotor pole combinations in variable flux reluctance machines using magnetic gearing effect. IEEE Trans. Ind. Appl. 2019, 55, 1495–1504. [Google Scholar] [CrossRef]
- Du, Y.; Mao, Y.; Xiao, F.; Zhu, X.; Sun, Y.; Quan, L. A pole-changing doubly salient permanent magnet motor. IEEE Trans. Transp. Electrif. 2022, 8, 2479–2489. [Google Scholar] [CrossRef]
- Cheng, M.; Chau, K.T.; Chan, C.C.; Sun, Q. Control and operation of a new 8/6-pole doubly salient permanent-magnet motor drive. IEEE Trans. Ind. Appl. 2003, 39, 1363–1371. [Google Scholar] [CrossRef]
- Gao, Y.; Qu, R.; Li, D.; Jian, L.; Zhou, G. Consequent-pole flux-reversal permanent-magnet machine for electric vehicle propulsion. IEEE Trans. Appl. Supercond. 2016, 26, 5200105. [Google Scholar] [CrossRef]
- Tu, Y.; Lin, M.; Lin, K.; Kong, Y.; Xu, D. Comprehensive comparison of two fault tolerant axial field modular flux-switching permanent magnet machines with different stator and rotor pole-pairs combinations. Machines 2022, 10, 201. [Google Scholar] [CrossRef]
- Li, H.; Zhu, Z.Q.; Hua, H. Comparative analysis of flux reversal permanent magnet machines with toroidal and concentrated windings. IEEE Trans. Ind. Electron. 2020, 67, 5278–5290. [Google Scholar] [CrossRef]
- Li, H.; Zhu, Z.Q. Investigation of stator slot/rotor pole combination of flux reversal permanent magnet machine with consequent-pole PM structure. J. Eng. 2019, 2019, 4267–4272. [Google Scholar] [CrossRef]
- Cao, L.; Chau, K.T.; Lee, C.H.T.; Li, W.; Fan, H. Design and analysis of electromagnetic gears with variable gear ratios. IEEE Trans. Magn. 2017, 53, 8204706. [Google Scholar] [CrossRef]
- Chau, K.T.; Liu, C.; Li, Y.B.; Jiang, J.Z. Design and analysis of a stator-doubly-fed doubly-salient permanent-magnet machine for automotive engines. IEEE Trans. Magn. 2006, 42, 3470–3472. [Google Scholar] [CrossRef] [Green Version]
- Zhu, X.; Hua, W. Stator-slot/rotor-pole pair combinations of flux-reversal permanent magnet machine. IEEE Trans. Ind. Electron. 2019, 66, 6799–6810. [Google Scholar] [CrossRef]
- Abdelkefi, A.; Souissi, A.; Abdennadher, I.; Masmoudi, A. On the analysis and torque enhancement of flux-switching permanent magnet machines in electric power steering systems. World Electr. Veh. J. 2022, 13, 64. [Google Scholar] [CrossRef]
- Spooner, E.; Chalmers, B.J. ‘TORUS’: A slotless, toroidal-stator, permanent-magnet generator. IEE Proc. B (Elec. Power Appl.) 1992, 139, 497–506. [Google Scholar] [CrossRef] [Green Version]
- Giulii Capponi, F.; De Donato, G.; Caricchi, F. Recent advances in axial-flux permanent-magnet machine technology. IEEE Trans. Ind. Appl. 2012, 48, 2190–2205. [Google Scholar] [CrossRef]
- Sabioni, C.L.; Ribeiro, M.F.O.; Vasconcelos, J.A. Robust design of an axial-flux permanent magnet synchronous generator based on many-objective optimization approach. IEEE Trans. Magn. 2018, 54, 8101704. [Google Scholar] [CrossRef]
- Xu, L.; Zhu, X.; Fan, W.; Zhang, C.; Zhang, L.; Quan, L. Comparative analysis and design of partitioned stator hybrid excitation axial flux switching PM motors for in-wheel traction applications. IEEE Trans. Energy Convers. 2022, 37, 1416–1427. [Google Scholar] [CrossRef]
















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameters | DSPM | FRPM | Parameters | DSPM | FRPM |
|---|---|---|---|---|---|
| Outer diameter | 420 mm | Rotor slot arc | 27.5° | ||
| Inner diameter | 168 mm | AC winding arc | 16° | 12° | |
| Air-gap length | 0.6 mm | MC winding arc | 16° | 6° | |
| Axial stack length | 186.4 mm | Turns per AC coils | 20 | ||
| Rotor yoke length | 17.5 mm | Turns per MC coils | 30 | ||
| Rotor teeth length | 12.5 mm | 15 mm | Slot filling factor | 0.6 | |
| PM thickness | 24 mm | 5 mm | PM material | N35SH | |
| Stator yoke thickness | 60 mm | 35 mm | SMC material | Somaloy 700-3P | |
| Height of MC winding | 22 mm | 20 mm | No. of rotor slots | 8 | 16 |
| Characteristics | DSPM | FRPM | FSPM |
|---|---|---|---|
| SMC volume (L) | 14.38 | 12.65 | 12.90 |
| PM volume (L) | 1.37 | 0.47 | 1.75 |
| Frequency (Hz) | 120 | 240 | 150 |
| Back-EMF amplitude (V) | 150.2 | 165.3 | 298.7 |
| Current (rms, A) | 73.5 | 89.8 | 89.4 |
| Total torque (Nm) | 526.6 | 628.2 | 950.1 |
| Torque ripple | 62.3% | 18.2% | 7.8% |
| Total torque/PM volume (Nm/L) | 384.4 | 1336.6 | 542.9 |
| Torque density (Nm/kg) | 3.58 | 4.51 | 6.04 |
| Output power (kW) | 49.62 | 59.21 | 89.54 |
| Loss (kW) | 5.81 | 10.57 | 4.29 |
| Efficiency | 89.5% | 84.9% | 95.4% |
| Power density (kW/kg) | 0.34 | 0.43 | 0.57 |
| Parameters | Value | Parameters | Value |
|---|---|---|---|
| Outer diameter | 220 mm | Turns per AC coils | 60 |
| Inner diameter | 128 mm | Turns per MC coils | 64 |
| Air-gap length | 1.0 mm | Slot filling factor | 0.4 |
| Axial stack length | 88 mm | PM remanence | 1.14 T |
| Stator poles no. | 12 | PM volume | 163 cm3 |
| Rotor poles no. | 10 | SMC materials | Somaloy 700-3P |
| Coil type | AWG 22 | Outer frame material | Aluminum |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Yang, T.; Chau, K.T.; Liu, W.; Ching, T.W.; Cao, L. Comparative Analysis and Design of Double-Rotor Stator-Permanent-Magnet Motors with Magnetic-Differential Application for Electric Vehicles. World Electr. Veh. J. 2022, 13, 199. https://doi.org/10.3390/wevj13110199
Yang T, Chau KT, Liu W, Ching TW, Cao L. Comparative Analysis and Design of Double-Rotor Stator-Permanent-Magnet Motors with Magnetic-Differential Application for Electric Vehicles. World Electric Vehicle Journal. 2022; 13(11):199. https://doi.org/10.3390/wevj13110199
Chicago/Turabian StyleYang, Tengbo, Kwok Tong Chau, Wei Liu, Tze Wood Ching, and Libing Cao. 2022. "Comparative Analysis and Design of Double-Rotor Stator-Permanent-Magnet Motors with Magnetic-Differential Application for Electric Vehicles" World Electric Vehicle Journal 13, no. 11: 199. https://doi.org/10.3390/wevj13110199