
Testing and Evaluation of the Electric Drive System on the Vehicle Level

Abstract
:1. Introduction
2. Influence of System Matching and the Control Strategy
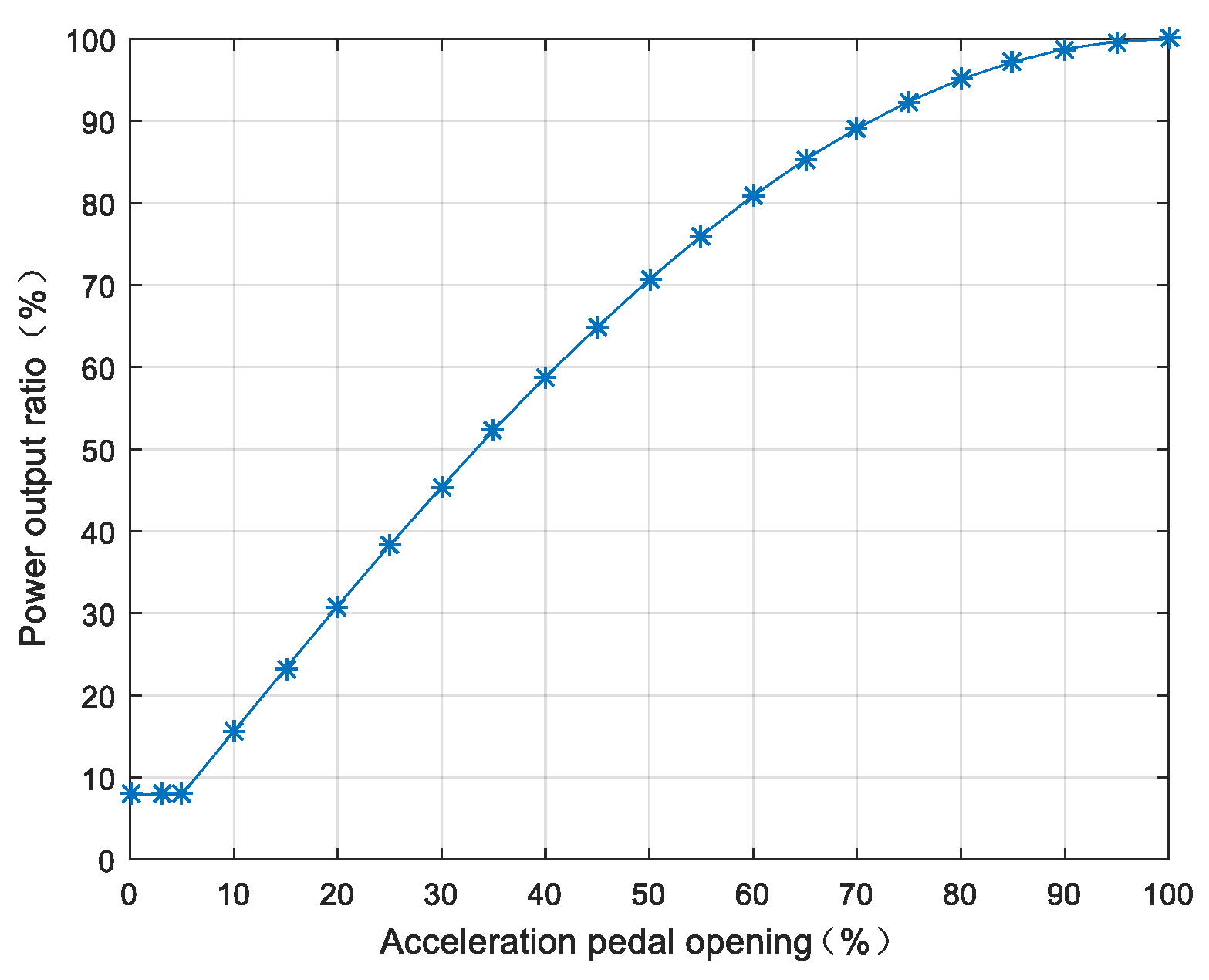
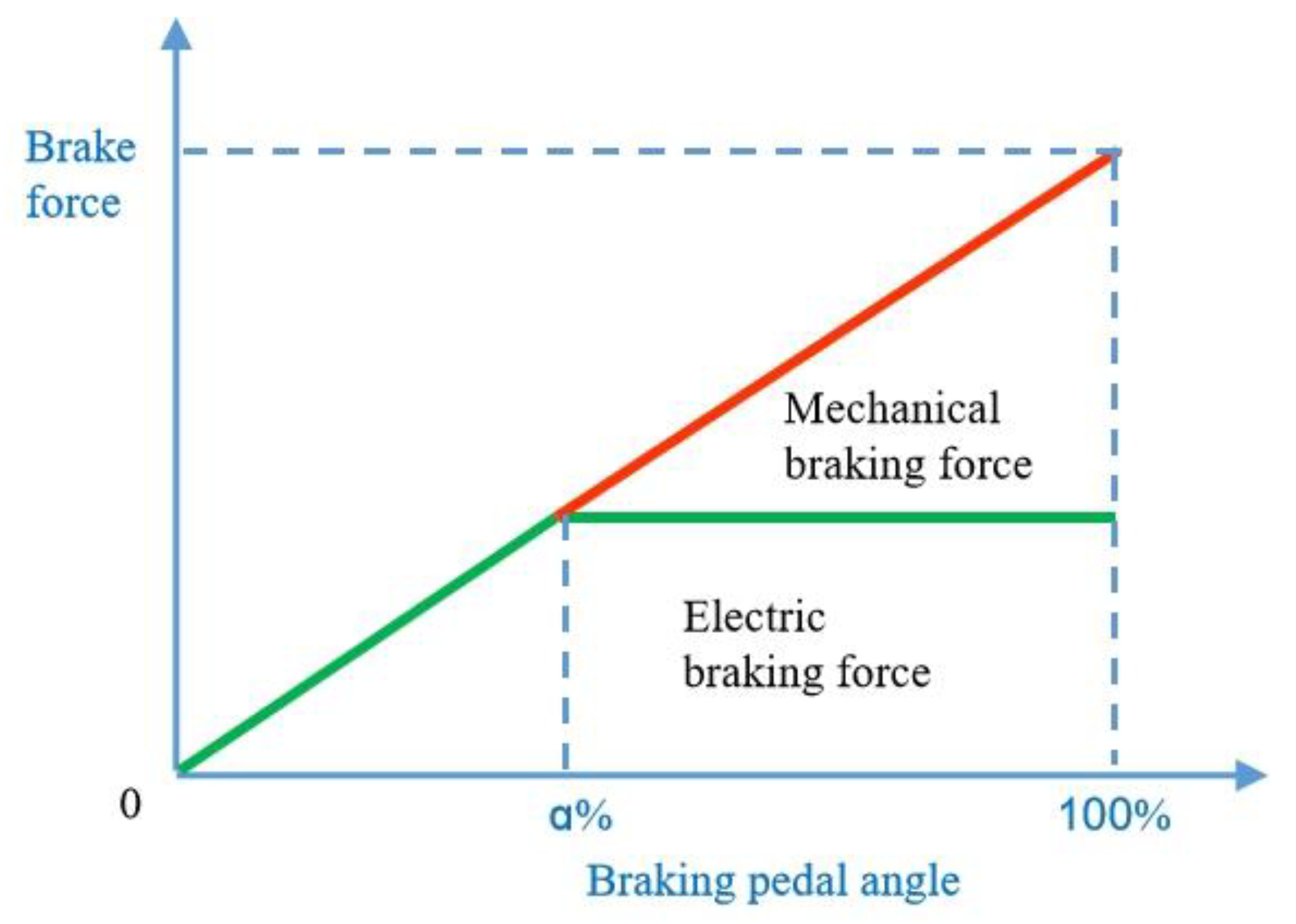
2.1. Typical Control Strategy Analysis
2.2. Impact on Electric Driving System Testing on the Vehicle Level
- Input voltage control. The allowed voltage range should be selected before the test, and each test point should work as quickly as possible. Once beyond that range, the battery should be charged in time.
- Cooling system control. During the test, we should make the vehicle cooling system work properly and maintain the temperature range changes in a specified range. If necessary, we should stop the test and wait a minute until each subsystem has recovered from overtemperature.
- Working point control. The test can only control the vehicle output through the pedal opening profile, and thus steady-state testing should maintain a stable opening degree. A dynamic test is needed to adjust the pedal to follow the vehicle’s V–T curve (speed–time).
- Working point recording. Due to the inevitable voltage changes during testing, it is necessary to collect and analyze the high-speed number simultaneously to obtain the transient power and efficiency of each working point.
- Small torque measurement. For the minimum power required in creeping as shown in Figure 2, it is difficult to measure small torque at low speed. The regenerative braking torque during the coast-down testing determined the minimum braking torque in other speed ranges.
- Steady-state efficiency calculation. Because of the increment optimization control of the output torque, data recording should be performed after a stable period. For highly synchronous data acquisition systems, this problem can be overcome even for transient recording.
3. Performance Evaluation of a Full-Vehicle Electric Drive System
3.1. Efficiency Testing under Different Cycling Conditions
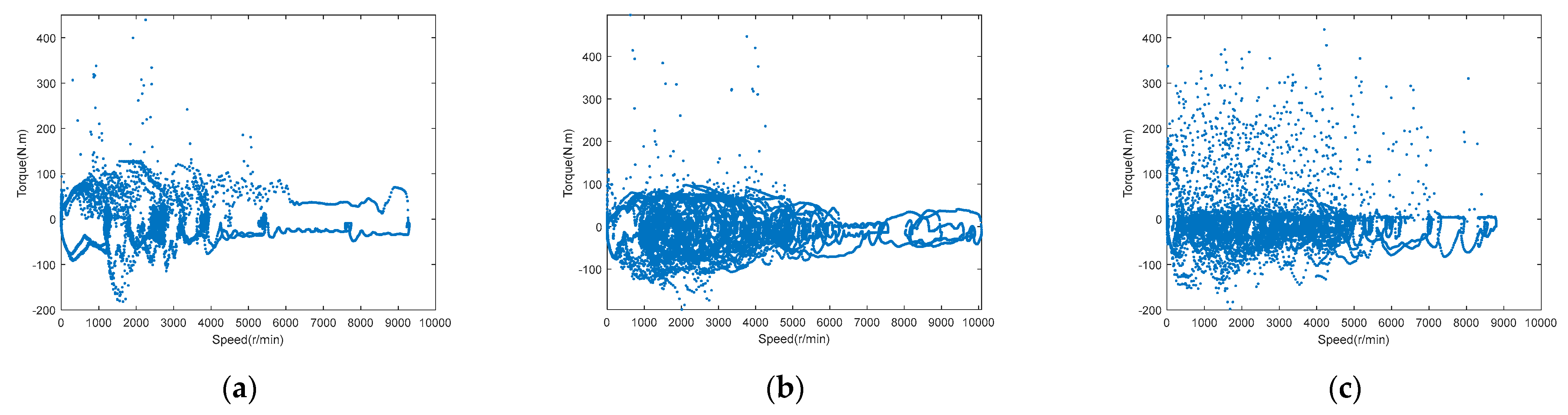
3.2. Distribution of Working Points under Different Cycles
3.3. External Characteristics Test
3.4. EDS’s Temperature Rise Test
4. Discussion
Author Contributions
Funding
Conflicts of Interest
References
- Falcão, E.A.M.; Teixeira, A.C.R.; Sodré, J.R. Analysis of CO2 emissions and techno-economic feasibility of an electric commercial vehicle. Energy 2017, 193, 297–307. [Google Scholar] [CrossRef]
- Vassileva, I.; Campillo, J. Adoption barriers for electric vehicles: Experiences from adopters in Sweden. Energy 2016, 120, 632–641. [Google Scholar] [CrossRef]
- De Gennaro, M.; Paffumi, E.; Martini, G. Customer-driven design of the recharge infrastructure and Vehicle-to-Grid in urban areas: A large-scale application for electric vehicles deployment. Energy 2015, 82, 294–311. [Google Scholar] [CrossRef]
- Fathabadi, H. Utilization of electric vehicles and renewable energy sources used as distributed generators for improving characteristics of electric power distribution system. Energy 2015, 90, 1100–1110. [Google Scholar] [CrossRef]
- Felgenhauer, M.F.; Pellow, M.A.; Benson, S.M.; Hamacher, T. Evaluating co-benefits of battery and fuel cell vehicles in a community in California. Energy 2016, 114, 360–368. [Google Scholar] [CrossRef]
- Chan, C.C. The state of the art of electric, hybrid and fuel cell vehicles. Proc. IEEE 2007, 95, 704–718. [Google Scholar] [CrossRef]
- Cao, D.; Hu, J.; Xu, X. Research on Standard System of Electric Drive System of Electric Vehicle. China Auto 2019, 4, 50–54. [Google Scholar]
- Kong, Z.; Huang, X.; He, P.; Cao, D.; Li, W. Study on Evaluation of High-Efficiency Area of Drive Motor System for Electric Vehicle. In Proceedings of the Sixth Annual Conference on Automotive Testing technology of China Society of Automotive Engineers, Shanghai, China, 19 October 2021. [Google Scholar]
- Du, J. Design and Study on High Efficient High Power Density Motor for Electric Vehicles Application. Ph.D. Thesis, Tianjin University, Tianjin, China, 2017; pp. 2–9. [Google Scholar]
- Zhou, C. Research on Combined-Pole V-Shape Interior Permanent-Magnet Synchronous Machine. Master’s Thesis, Harbin Institute of Technology, Harbin, China, 2016; pp. 32–43. [Google Scholar]
- Zhang, J.; Lv, C.; Li, Y.; Gou, J.; He, C. Status and prospect of regenerative braking technology in electric cars. Automot. Eng. 2014, 36, 911–918. [Google Scholar]
- Kim, N.; Duoba, M.; Kim, N.; Rousseau, A. Validating Volt PHEV Model with Dynamometer Test Data Using Autonomie. SAE Int. 2013, 6, 985–992. [Google Scholar] [CrossRef]
- Yang, L.; Luo, W.; Wang, G.; Li, R. Road coastdown resistance and dyno simulation using coastsown method. Eng. Test 2015, 55, 60–63. [Google Scholar]
- Serrao, L. A Comparative Analysis of Energy Management Strategies for Hybrid Electric Vehicles. Ph.D. Thesis, The Ohio State University, Columbus, OH, USA, 2009. [Google Scholar]
- Bayindir, K.C.; Gözükücük, M.A.; Teke, A. A comprehensive overview of Hybrid electric vehicle: Powertrain Configuration, Powertrain Control Techniques and Electronics Control Units. Energy Convers. Manag. 2011, 52, 1305–1313. [Google Scholar] [CrossRef]
- Ziogou, C.; Ipsakis, D.; Seferlis, P.; Bezergianni, S.; Papadopoulou, S.; Voutetakis, S. Optimal production of renewable hydrogen based on an efficient energy management strategy. Energy 2013, 55, 58–67. [Google Scholar] [CrossRef]
- Kim, N.; Rask, E.; Rousseau, A. Control Analysis under Different Driving Conditions for Peugeot 3008 Hybrid 5. SAE Int. J. Altern. Powertrains 2014, 3, 44–55. [Google Scholar] [CrossRef]
- Cubito, C.; Rolando, L.; Millo, F.; Ciuffo, B.; Serra, S.; Trentadue, G.; Marcos Garcia, O.; Fontaras, G. Energy Management Analysis under Different Operating Modes for a Euro-6 Plug-in Hybrid Passenger Car; SAE Technical Paper 2017-01-1160; SAE International: Warrendale, PA, USA, 2017. [Google Scholar] [CrossRef]
- Kong, Z.; Tang, Z.; Yu, C. Study on multi-objective coordination and optimization control method for hybrid bus with dual-planetary structure. In Proceedings of the EVS28, Goyang, Korea, 3–6 May 2015. [Google Scholar]
- Kong, Z.; Wang, H. Increment Dynamic Adjustment Method for Hybrid Energy Source System in Electric Vehicles. In Proceedings of the CCC2018, Wuhan, China, 25–27 July 2018. [Google Scholar]
- Pavlovic, J.; Marotta, A.; Ciuffo, B.; Serra, S.; Fontaras, G.; Anagnostopoulos, K.; Tsiakmakis, S.; Arcidiacono, V.; Hausberger, S.; Silberholz, G. Correction of Test Cycle Tolerances: Evaluating the Impact on CO2 Results. Transp. Res. Procedia 2016, 14, 3099–3108. [Google Scholar] [CrossRef]
- Cubito, C.; Millo, F.; Boccardo, G.; Di Pierro, G.; Ciuffo, B.; Fontaras, G.; Serra, S.; Garcia, M.O.; Trentadue, G. Impact of Different Driving Cycles and Operating Conditions on CO2 Emissions and Energy Management Strategies of a Euro-6 Hybrid Electric Vehicle. Energies 2017, 10, 1590. [Google Scholar] [CrossRef]
- Pavlovic, J.; Marotta, A.; Ciuffo, B. CO2 emissions and energy demands of vehicles tested under the NEDC and the new WLTP type approval test procedures. Appl. Energy 2016, 177, 661–670. [Google Scholar] [CrossRef]
- Luo, C.; Guo, X.; Ma, Y.; Li, G.; Zhang, F. The research on emission and fuel consumption characteristics of light vehicles under different cycling conditions. Small Intern. Combust. Engine Veh. Tech. 2019, 48, 1–4. [Google Scholar]
- Krein, P.T. Battery Management for Maximum Performance in Plug-In Electric and Hybrid Vehicles. In Proceedings of the Vehicle Power and Propulsion Conference, Arlington, TX, USA, 9–12 September 2007; pp. 2–5. [Google Scholar]
- Tribioli, L. Energy-Based Design of Powertrain for a Re-Engineered Post-Transmission Hybrid Electric Vehicle. Energies 2017, 10, 918. [Google Scholar] [CrossRef] [Green Version]
- Onori, S.; Spagnol, P.; Marano, V.; Guezennec, Y.; Rizzoni, G. A new life estimation method for Lithium-ion batteries in Plug-in Hybrid Electric Vehicle applications. Power Electron. Int. J. 2012, 4, 302–319. [Google Scholar] [CrossRef]
- Dong, G.; Chen, Z.; Wei, J.; Zhang, C.; Wang, P. An online model-based method for state of energy estimation of lithium-ion batteries using dual filters. J. Power Sources 2016, 301, 277–286. [Google Scholar] [CrossRef]











{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Items | Parameters | Items | Parameters |
|---|---|---|---|
| Vehicle weight (kg) | 2300 | Driving mileage (km) | 560 (NEDC) |
| Size (L × W × H (mm)) | 4870 × 1950 × 1725 | Motor type | PM |
| Maximum speed (km/h) | 180 | Driving type | FWD |
| Cycles | NEDC | WLTC | CLTC-P | |||
|---|---|---|---|---|---|---|
| Modes | Driving | Braking | Driving | Braking | Driving | Braking |
| Electric energy (kWh) | 1.645 | 0.528 | 3.976 | 1.239 | 2.413 | 0.948 |
| Mechanical energy (kWh) | 1.376 | 0.625 | 3.393 | 1.454 | 2.077 | 1.166 |
| Efficiency (%) | 83.65 | 84.48 | 85.34 | 85.20 | 86.07 | 81.30 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Kong, Z.; Zhang, W.; Zhang, H. Testing and Evaluation of the Electric Drive System on the Vehicle Level. World Electr. Veh. J. 2021, 12, 182. https://doi.org/10.3390/wevj12040182
Kong Z, Zhang W, Zhang H. Testing and Evaluation of the Electric Drive System on the Vehicle Level. World Electric Vehicle Journal. 2021; 12(4):182. https://doi.org/10.3390/wevj12040182
Chicago/Turabian StyleKong, Zhiguo, Wei Zhang, and Helin Zhang. 2021. "Testing and Evaluation of the Electric Drive System on the Vehicle Level" World Electric Vehicle Journal 12, no. 4: 182. https://doi.org/10.3390/wevj12040182