
Energy Analysis of Highway Electric HDV Platooning Considering Adaptive Downhill Coasting Speed

Abstract
:1. Introduction
2. Model and Assumptions
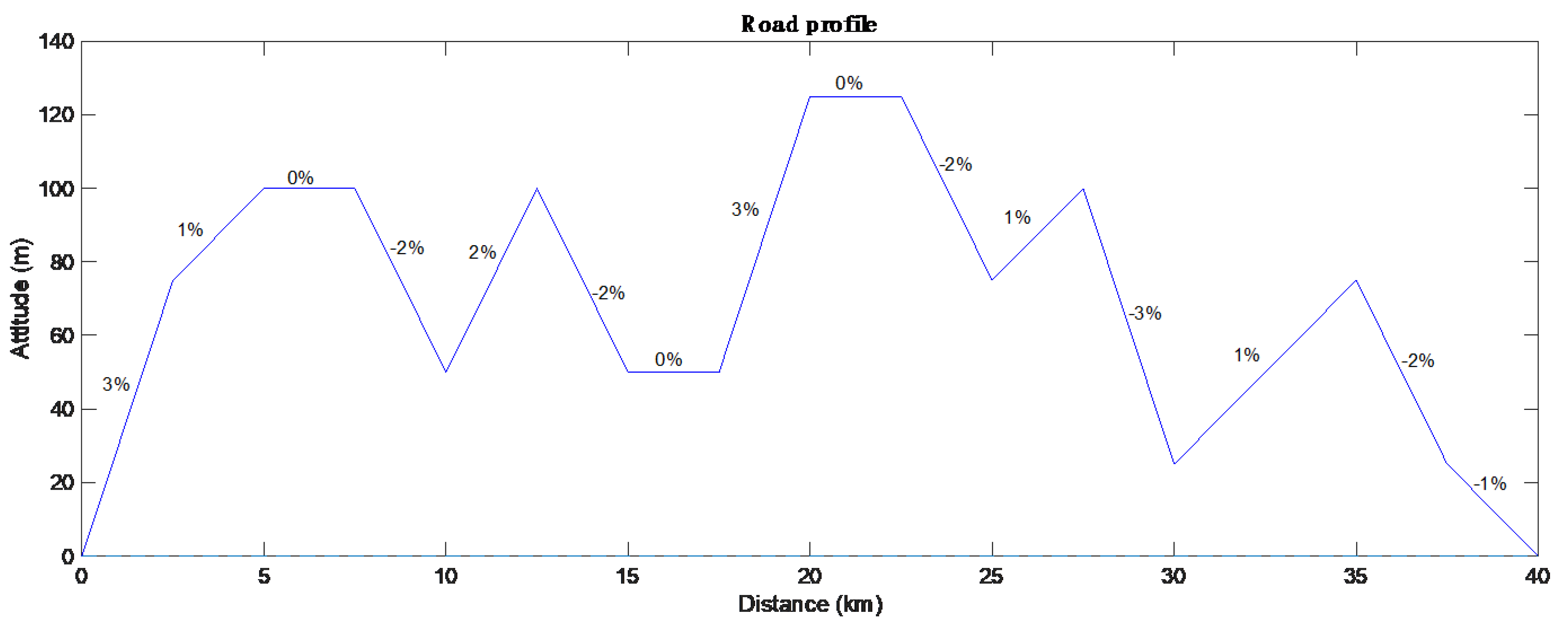
2.1. Profile of Road Grades
2.2. Reduction of Air Drag
2.3. Energy Model
3. Coasting Speeds
4. Simulations
4.1. Settings and Assumptions
4.2. Energy Consumption without Regenerative Braking
4.3. Energy Consumption with Regenerative Braking
4.4. Trade-off between Energy Savings and Travel Time
5. Conclusions
Author Contributions
Funding
Conflicts of Interest
References
- Daw, C.S.; Gao, Z.; Smith, D.E.; Laclair, T.J.; Pihl, J.A.; Edwards, K.D. Simulated fuel economy and emissions performance during city and interstate driving for a heavy-duty hybrid truck. SAE Int. J. Commer. Veh. 2013, 6, 161–182. [Google Scholar] [CrossRef]
- Alam, A.A.; Gattami, A.; Johansson, K.H. An experimental study on the fuel reduction potential of heavy duty vehicle platooning. In Proceedings of the 13th international IEEE conference on intelligent transportation systems, Funchal, Portugal, 19–22 September 2010. [Google Scholar]
- Liang, K.-Y.; Mårtensson, J.; Johansson, K.H. When is it fuel efficient for a heavy duty vehicle to catch up with a platoon? IFAC Proc. Vol. 2013, 46, 738–743. [Google Scholar] [CrossRef] [Green Version]
- Bishop, R.; Bevly, D.; Switkes, J.; Park, L. Results of initial test and evaluation of a driver-assistive truck platooning prototype. In Proceedings of the 2014 IEEE Intelligent Vehicles Symposium Proceedings, Dearborn, MI, USA, 8–11 June 2014. [Google Scholar]
- Ellwanger, S.; Wohlfarth, E. Truck platooning application. In Proceedings of the 2017 IEEE Intelligent Vehicles Symposium (IV), Los Angeles, CA, USA, 11–14 June 2017. [Google Scholar]
- Chan, E.; Gilhead, P.; Jelinek, P.; Krejci, P.; Robinson, T. Cooperative control of SARTRE automated platoon vehicles. In Proceedings of the 19th ITS World CongressERTICO-ITS EuropeEuropean CommissionITS AmericaITS Asia-Pacific, Vienna, Austria, 22–26 October 2012. [Google Scholar]
- Alam, A. Fuel-Efficient Heavy-Duty Vehicle Platooning. Ph.D. Thesis, KTH Royal Institute of Technology, Stockholm, Sweden, 2014. [Google Scholar]
- Sahlholm, P. Distributed Road Grade Estimation for Heavy Duty Vehicles. Ph.D. Thesis, KTH Royal Institute of Technology, Stockholm, Sweden, 2011. [Google Scholar]
- Humphreys, H.; Bevly, D. Computational fluid dynamic analysis of a generic 2 truck platoon. SAE Tech. Pap. 2016, 1–8. [Google Scholar] [CrossRef]
- Humphreys, H.L.; Batterson, J.; Bevly, D.; Schubert, R. An evaluation of the fuel economy benefits of a driver assistive truck platooning prototype using simulation. SAE Tech. Pap. 2016, 1–9. [Google Scholar]
- McAuliffe, B.; Croken, M.; Ahmadi-Baloutaki, M.; Raeesi, A. Fuel-Economy Testing of a Three-Vehicle Truck Platooning System; National Research Council of Canada: Ottawa, ON, Canada, 2017. [Google Scholar]
- Zhang, L.; Chen, F.; Ma, X.; Pan, X. Fuel Economy in Truck Platooning: A Literature Overview and Directions for Future Research. J. Adv. Transp. 2020, 2020, 2604012. [Google Scholar] [CrossRef]
- Ohtsuka, T. A continuation/GMRES method for fast computation of nonlinear receding horizon control. Automatica 2004, 40, 563–574. [Google Scholar] [CrossRef]
- Torabi, S. Fuel-Efficient Truck Platooning Using Speed Profile Optimization, Department of Mechanics and Maritime Sciences; Chalmers University of Technology: Gothenburg, Sweden, 2017. [Google Scholar]
- He, C.R.; Ge, J.I.; Orosz, G. Fuel Efficient Connected Cruise Control for Heavy-Duty Trucks in Real Traffic. IEEE Trans. Control. Syst. Technol. 2020, 28, 2474–2481. [Google Scholar] [CrossRef]
- Yoon, D.D.; Ayalew, B.; Ivanco, A.; Chen, Y. Predictive kinetic energy management for large electric vehicles using radar information. In Proceedings of the 2020 IEEE Conference on Control Technology and Applications, Montreal, QC, Canada, 24–26 August 2020; pp. 82–87. [Google Scholar]
- Gazran, S.; Boukherroub, T.; Rönnqvist, M.; Paquet, M. Truck Platooning Transportation Planning: A Review with Emphasize on Operation Research Methods. Available online: https://www.researchgate.net/publication/349830460_Truck_platooning_transportation_planning_A_review_with_emphasis_on_Operations_Research_methods (accessed on 5 October 2021).
- USA Elevation Map. Available online: http://www.yellowmaps.com/maps/img/US/elevation/USA-elevation-map-242.jpg (accessed on 5 October 2021).
- Hucho, W.; Sovran, G. Aerodynamics of road vehicles. Annu. Rev. Fluid Mech. 1993, 25, 485–537. [Google Scholar] [CrossRef]
- Ehsani, M.; Gao, Y.; Longo, S.; Ebrahimi, K.M. Modern Electric, Hybrid Electric, and Fuel Cell Vehicles; CRC press: Boca Raton, FL, USA, 2018. [Google Scholar]





{kind=link}
{kind=link}
{kind=link}
{kind=link}
| 1000 | 15.1 | 31.5 | 41.8 |
| 2000 | 21.4 | 44.5 | 59.2 |
| 3000 | 26.2 | 54.5 | 72.5 |
| 6000 | 37.0 | 77.0 | 102.5 |
| Parameters | Values |
|---|---|
| 12,000/20,000/25,000/30,000 kg | |
| 0.8 | |
| 10 | |
| 1.29 | |
| 9.81 | |
| 0.007 |
| Mass (kg) | ||||
|---|---|---|---|---|
| 12,000 | 2500 | 23.9 | 49.7 | 66.2 |
| 20,000 | 4167 | 30.8 | 64.2 | 85.5 |
| 25,000 | 5208 | 34.5 | 71.8 | 95.5 |
| 30,000 | 6250 | 37.8 | 78.7 | 104.7 |
| Mass (kg) | Constant Speed in Case (a)(b) | Speeds in Case (c) | Energy Savings | |||
|---|---|---|---|---|---|---|
| Case (b) | Case (c) | |||||
| 12,000 | 55.8 | 55.9 | 49.7 | 66.2 | 30.7% | 33.2% |
| 20,000 | 78.3 | 81.6 | 64.2 | 85.5 | 32.3% | 33.4% |
| 25,000 | 89.5 | 94.4 | 71.8 | 95.5 | 32.7% | 33.3% |
| 30,000 | 98.4 | 104.1 | 78.7 | 104.7 | 32.8% | 33.2% |
| Mass (kg) | Constant Speed in Case (a)(b) | Speeds in Case (c) | Energy Savings | |||
|---|---|---|---|---|---|---|
| Case (b) | Case (c) | |||||
| 12,000 | 55.9 | 57.5 | 50.0 | 50.0 | 31.1% | 32.1% |
| 20,000 | 55.9 | 57.5 | 50.0 | 50.0 | 27.9% | 28.7% |
| 25,000 | 55.9 | 57.5 | 50.0 | 50.0 | 27.1% | 28.2% |
| 30,000 | 55.9 | 57.5 | 50.0 | 50.0 | 27.7% | 29.0% |
| Mass (kg) | Increase of Travel Time | Energy Savings | |
|---|---|---|---|
| Case (b) | Case (c) | ||
| 12,000 | 3.9% | 31.5% | 34.5% |
| 9.5% | 33.6% | 39.6% | |
| 22.2% | 33.8% | 49.3% | |
| 20,000 | 3.9% | 27.9% | 30.4% |
| 9.5% | 30.1% | 35.1% | |
| 22.2% | 33.8% | 42.9% | |
| 25,000 | 3.9% | 27.1% | 29.8% |
| 9.5% | 28.7% | 34.0% | |
| 22.2% | 32.4% | 41.3% | |
| 30,000 | 3.9% | 27.7% | 30.5% |
| 9.5% | 28.0% | 33.7% | |
| 22.2% | 31.2% | 40.2% | |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Hu, M.; Bauer, P. Energy Analysis of Highway Electric HDV Platooning Considering Adaptive Downhill Coasting Speed. World Electr. Veh. J. 2021, 12, 180. https://doi.org/10.3390/wevj12040180
Hu M, Bauer P. Energy Analysis of Highway Electric HDV Platooning Considering Adaptive Downhill Coasting Speed. World Electric Vehicle Journal. 2021; 12(4):180. https://doi.org/10.3390/wevj12040180
Chicago/Turabian StyleHu, Miaomiao, and Peter Bauer. 2021. "Energy Analysis of Highway Electric HDV Platooning Considering Adaptive Downhill Coasting Speed" World Electric Vehicle Journal 12, no. 4: 180. https://doi.org/10.3390/wevj12040180