
Characteristics of Battery Management Systems of Electric Vehicles with Consideration of the Active and Passive Cell Balancing Process



Abstract
:1. Introduction
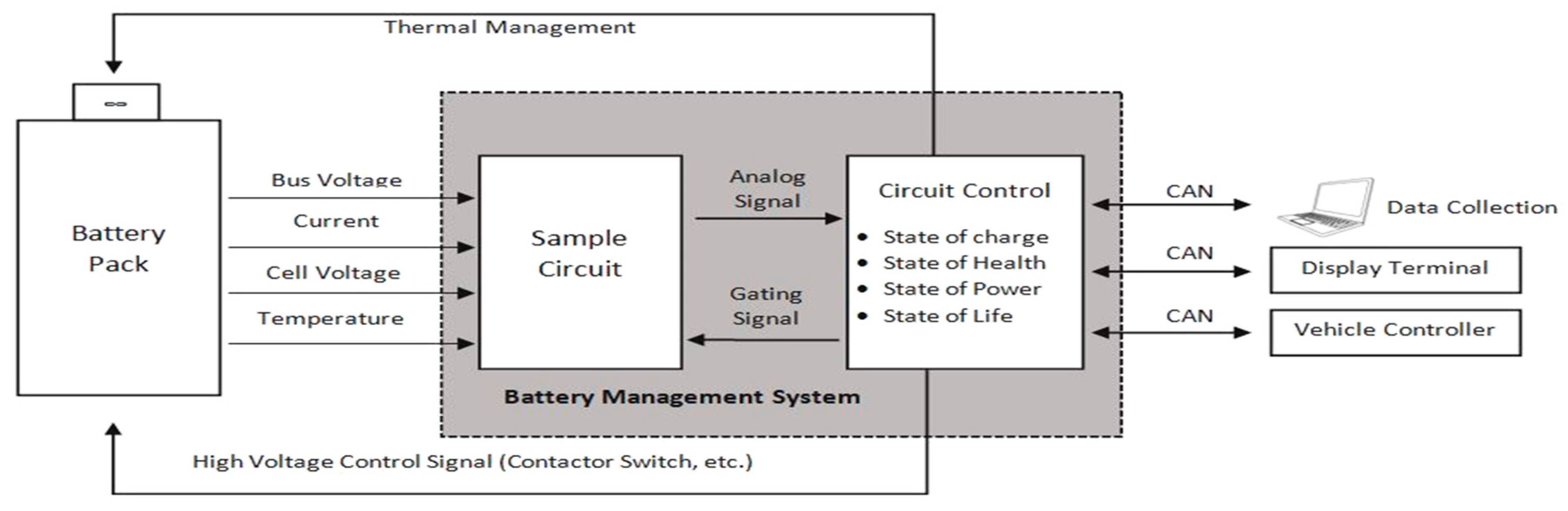
2. Batter Management System (BMS)
BMS Architecture/Framework
3. BMS Functions and Requirements
3.1. BMS Features/Functions
3.1.1. State of Charge Estimation (SOC)
3.1.2. State of Health (SOH)
3.1.3. State of Life (SOL) or Remaining Useful Life (RUL)
3.1.4. State of Power (SOP)
3.1.5. State of Safety (SOS)
3.1.6. Depth of Discharge (DOD)
3.1.7. State of Function (SOF)
3.1.8. State of Energy (SOE)
3.1.9. End of Life (EOL)
3.1.10. End of Discharge (EOD)
3.1.11. Thermal Management
Internal Temperature Estimation
3.1.12. Voltage Measurement
3.1.13. Current Measurement
3.1.14. Cell Monitoring and Cell Balancing
3.1.15. Power Management Control
3.1.16. Charging and Discharging of Cells
3.1.17. Communication
3.1.18. Computation
3.1.19. Data Monitoring and Storage
3.1.20. Miscellaneous BMS Functions
3.2. BMS Requirements
3.2.1. Electromagnetic Interference (EMI)
3.2.2. Contactors Requirement
3.2.3. Redundancy
3.2.4. Galvanic Isolation
3.2.5. Overall Protection
3.2.6. Other Requirements
4. BMS Topologies
4.1. Centralized Topology
4.2. Modularized Topology
4.3. Distributed Topology
4.4. Decentralized Topology
5. Battery Modeling
5.1. Fundamentals of Battery Modeling
5.1.1. Usage-Capacity and State of Health (SOH)
5.1.2. Polarizations
5.1.3. Charge Recovery Effect
5.1.4. Utilization Factor
5.2. Battery Models
5.2.1. Battery Electric Model
5.2.2. Battery Thermal Model
5.2.3. Battery-Coupled Electro-Thermal Model
6. Issues and Challenges of BMS
6.1. SOC Estimation Issues
6.2. Real-Time SOH Estimation Issues
6.3. Optimal Charging Problem
6.4. Fast Characterization
6.5. Existing Battery Models Issues
6.6. Data Abundance, Variety, and Integrity Issues
6.7. Parameter Selection Issues for Intelligent Algorithms
6.8. Optimization Issues for Intelligent Algorithms
6.9. Thermal Management Issues
6.10. Thermal Runaway
6.11. RUL Prediction Issues
6.12. Early Charge Termination Issues
6.13. Premature Cells Degradation Due to Overcharging
6.14. Early Discharge Termination & Over-Discharging Issues
6.15. Issues of Safe Operating Region & Continuous Efficient Operation
6.16. Memory Effect Issues
6.17. Aging Issues
6.18. Hysteresis Characteristics Issues
6.19. Existing BMS Not Universal
6.20. Self Evaluation Issues
6.21. Estimation of Maximum Capacity and Modeling under Different Conditions
6.22. Capacity and Power Fading Issues
6.23. Safety Issues & Handling of Potential Risks
6.24. Battery Recycling Issues
6.25. Battery Reuse Issues
6.26. Battery Disposal Issues
6.27. Batteries Discharging Issues
6.28. Battery Charger Issue
6.29. Self-Discharge & Different Charging/Discharging Rate Issues
6.30. Communication Issues with Chargers
6.31. BMS Power Source and Power Consumption Issues
6.32. Miscellaneous Issues
7. Recommendations
7.1. Enhancing Safety and Reliability of BMS
7.2. Development of New Battery Models/Approaches
7.3. Advanced Multi Scale and Co-Estimation Process Needed
7.4. Algorithm Hybridization
7.5. Development of Advanced Prognostic Approaches
7.6. Efficient Prototype Design and Training Performance Enhancement
7.7. Advanced Thermal Management Approaches
7.8. Understanding Aging Effect
7.9. Life Cycle Assessment
7.10. Fast Charging Requirement
7.11. Enhancing LIBs Capacity
7.12. Uniform Rules Required for Disposing of Used LIBs
7.13. Efficient Recycling
7.14. Efficient Reuse
7.15. Universal BMS
7.16. Wireless BMS
7.17. Integration of BMS with Big Data Platform
7.18. BMS Virtualization
7.19. BMS Structure Enhancement
7.20. BMS Installations Recommendations
7.21. Tamper Proof BMS and Shutdown/Reset on Abnormal Behavior
7.22. Misc Recommendations
8. Commercially Available BMS
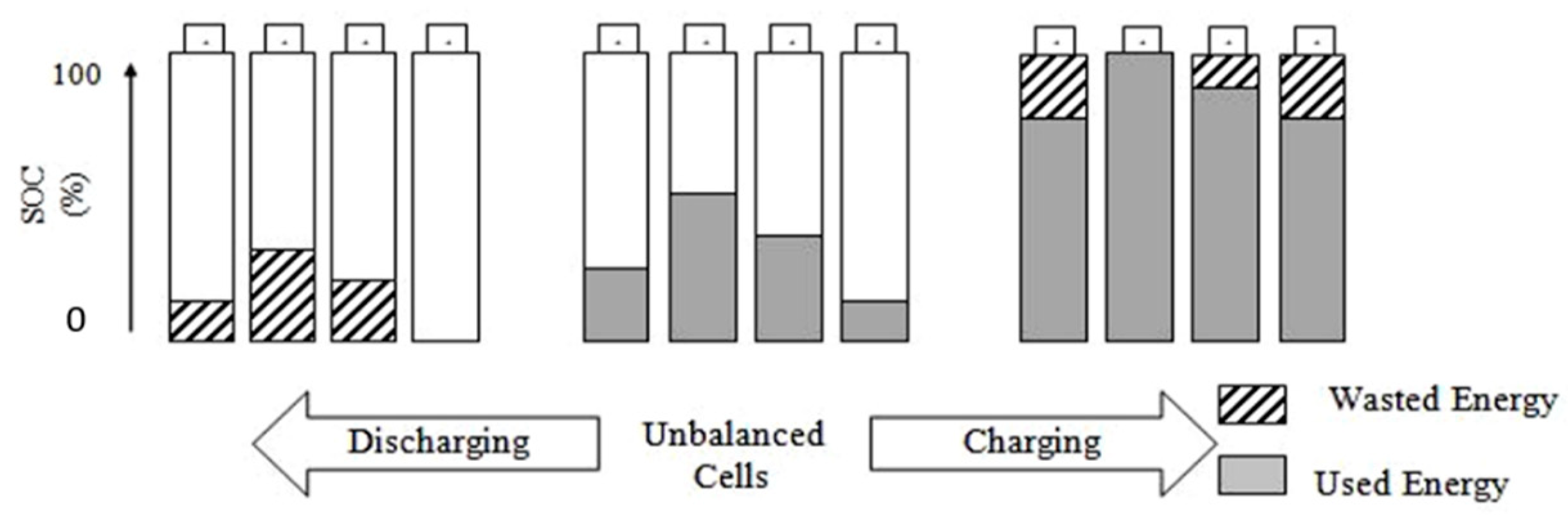
9. Cell Balancing
9.1. Passive Cell Balancing Techniques
9.2. Active Cell Balancing Techniques
10. Comparison between Passive and Active Cell Balancing
10.1. Modeling of a Cell Balancer
10.2. Simulation of Active and Passive Cell Balancer in Simulink
11. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Ouyang, Q.; Han, Z.; Xu, C.; Wang, Z. Cell Balancing Control for Lithium-Ion Battery Packs: A Hierarchical Optimal Approach. IEEE Trans. Ind. Inform. 2019, 16, 5065–5075. [Google Scholar] [CrossRef]
- Vardwaj, V.; Vishakha, V.; Jadoun, K.; Jayalaksmi, N.; Agarwal, A. Various Methods Used for Battery Balancing in Electric Vehicles: A Comprehensive Review. In Proceedings of the 2020 International Conference on Power Electronics & IoT Applications in Renewable Energy and its Control (PARC), Mathura, Uttar Pradesh, India, 28–29 February 2020; pp. 208–213. [Google Scholar]
- Sangang, C.; Chen, F.; Li, B. Lithium-Ion Battery Management System for Electric Vehicles. Int. J. Perform. Eng. 2018, 14, 3184–3194. [Google Scholar]
- Liu, K.; Li, K.; Qiao, P.; Cheng, Z. A brief review on key technologies in the battery management system of electric vehicles. Front. Mech. Eng. 2019, 14, 47–64. [Google Scholar] [CrossRef] [Green Version]
- Liuv, J.; Song, W.; Lin, S.; Feng, Z.; Ding, Y. Investigation on dynamic equalisation performance of lithium battery pack management. IET Circuits Devices Syst. 2017, 11, 388–394. [Google Scholar] [CrossRef]
- Omariba, B.; Zhang, L.; Sun, D. Review of Battery Cell Balancing Methodologies for Optimizing Battery Pack Performance in Electric Vehicles. IEEE Access 2019, 7, 129335–129352. [Google Scholar] [CrossRef]
- Ahmad, A.B.; Ooi, C.A.; Ishak, D.; Teh, J. Cell Balancing Topologies in Battery Energy Storage Systems: A Review. Int. Conf. Commun. Comput. Electron. Syst. 2019, 547, 159–165. [Google Scholar]
- Duraisamy, T.; Deepa, K. Active cell balancing for electric vehicle battery management system. Int. J. Power Electron. Drive Syst. 2020, 11, 571–579. [Google Scholar] [CrossRef]
- Nguyen, N.; Oruganti, K.; Na, K.; Bien, F. An Adaptive Backward Control Battery Equalization System for Serially Connected Lithium-ion Battery Packs. IEEE Trans. Veh. Technol. 2014, 63, 3651–3660. [Google Scholar] [CrossRef]
- Abhay, S.J.; Anuj, K.; Mandar, G.; Neeraj, P.; Sangeeta, K. Battery Management System. Int. Res. J. Eng. Technol. 2020, 7, 118–123. [Google Scholar]
- Yinjiao, X.; Eden, W.; Kwok, L.; Pecht, M. Battery Management Systems in Electric and Hybrid Vehicles. Energies 2011, 5, 1840–1857. [Google Scholar]
- Vaideeswaran, V.; Bhuvanesh, S.; Devasena, M. Battery Management Systems for Electric Vehicles using Lithium Ion Batteries. Innov. Power Adv. Comput. Technol. 2019, 1, 1–9. [Google Scholar]
- Balasingam, B.; Ahmed, M.; Pattipati, K. Battery Management Systems-Challenges and Some Solutions. Energies 2020, 22, 2825. [Google Scholar] [CrossRef]
- Lelie, M.; Thomas, B.; Knips, M.; Nordmann, H.; Florian, R.; Hendrik, Z.; Sauer, D. Battery Management System Hardware Concepts: An Overview. Appl. Sci. 2018, 8, 534. [Google Scholar] [CrossRef] [Green Version]
- Hannan, M.; Lipu, M.H.; Hussain, A.; Mohamed, A. A review of lithium-ion battery state of charge estimation and management system in electric vehicle applications: Challenges and recommendations. Renew. Sustain. Energy Rev. 2017, 78, 834–854. [Google Scholar] [CrossRef]
- Shabani, B.; Biju, M. Theoretical Modelling Methods for Thermal Management of Batteries. Energies 2015, 8, 10153–10177. [Google Scholar] [CrossRef]
- Ali, M.; Amad, Z.; Sarvar, S.; Alvi, J.; Hee, K. Towards a Smarter Battery Management System for Electric Vehicle Applications: A Critical Review of Lithium-Ion Battery State of Charge Estimation. Energies 2019, 12, 446. [Google Scholar] [CrossRef] [Green Version]
- Omariba, Z.B.; Lijun, Z.; Dongbai, S. Review on Health Management System for Lithium-Ion Batteries of Electric Vehicles. Electronics 2018, 7, 72. [Google Scholar] [CrossRef] [Green Version]
- Aslan, E.; Yasa, Y. A Review on The Battery State of Charge Estimation Methods For Electric Vehicle Battery Management Systems. In Proceedings of the 11th International Conference on Electrical and Electronics Engineering, Bursa, Turkey, 28–30 November 2019; pp. 281–285. [Google Scholar]
- Hannan, M.; Murshadul, H.; Hussain, A.; Yushaizad, Y.; Ker, P. State-of-the-Art and Energy Management System of Lithium-Ion Batteries in Electric Vehicle Applications: Issues and Recommendations. IEEE Access 2018, 6, 19362–19378. [Google Scholar] [CrossRef]
- Fill, A.; Birke, K.P. Impacts of cell topology, parameter distributions and current profile on the usable power and energy of lithium-ion batteries. In Proceedings of the 2019 International Conference on Smart Energy Systems and Technologies (SEST), Porto, Portugal, 9–11 September 2019; pp. 585–592. [Google Scholar]
- Xiong, R.; Jiayi, C.; Quonking, Y.; Hongwen, H.; Sun, F. Critical Review on the Battery State of Charge Estimation Methods for Electric Vehicles. IEEE Access 2018, 6, 1832–1843. [Google Scholar] [CrossRef]
- Abbas, M.; Eung, S.K.; Seul, K.K. Comparative Analysis of Battery Behavior with Different Modes of Discharge for Optimal Capacity Sizing and BMS Operation. Energies 2016, 9, 812. [Google Scholar] [CrossRef] [Green Version]
- Pattipati, B.; Sankavaram, C.; Pattipati, K. System Identification and Estimation Framework for Pivotal Automotive Battery Management System Characteristics. IEEE Trans. Syst. Man Cybern. 2011, 41, 869–884. [Google Scholar] [CrossRef]
- Hariprasad, A.; Priyanka, I.; Sandeep, R.; Ravi, V.; Shekar, O. Battery Management System in Electric Vehicles. Int. J. Eng. Res. Technol. 2020, 9, 605–607. [Google Scholar]
- Khanal, A.; Timilsina, A.; Paudyal, B.; Ghimire, S. Comparative Analysis of Cell Balancing Topologies in Battery Management Systems. In Proceedings of the IOE Graduate Conference, Lisbon, Portugal, 24 May 2019; pp. 845–851. [Google Scholar]
- Bharanitharan, J.; Prashanth, V. Electric Vehicle Enhanced Range, Lifetime and Safety through Ingenious Battery Management; LION Smart GmbH: München, Germany, 2019. [Google Scholar]
- Bonfiglio, C.; Roessler, W. A cost optimized battery management system with active cell balancing for lithium ion battery stacks. In Proceedings of the IEEE Vehicle Power and Propulsion Conference, Dearborn, MI, USA, 7–10 September 2009; pp. 176–182. [Google Scholar]
- Aswinth, R. Battery Management System (BMS) for Electric Vehicles. Available online: https://circuitdigest.com/article/battery-management-system-bms-for-electric-vehicles (accessed on 15 June 2021).
- Shang, Y.; Cui, N.; Zhang, C. A Global Modular Equalizer Based on Forward Conversion for Series-Connected Battery Strings. IEEE J. Emerg. Sel. Top. Power Electron. 2018, 6, 1456–1469. [Google Scholar] [CrossRef]
- Räber, M.; Abdeslam, O.; Heinzelmann, A.; Ramirez, A. Performance estimation of a cell-to-cell-type active balancing circuit for lithium-ion battery systems. In Proceedings of the IEEE 26th International Symposium on Industrial Electronics (ISIE), Edinburgh, UK, 21 June 2017; pp. 735–742. [Google Scholar]
- Hemavathi, S. Overview of cell balancing methods for Li-ion battery technology. Energy Storage 2021, 3, 203. [Google Scholar] [CrossRef]
- Naguib, M.; Kollmeyer, P.; Emadi, A. Lithium-Ion Battery Pack Robust State of Charge Estimation, Cell Inconsistency, and Balancing: Review. IEEE Access 2021, 9, 50570–50582. [Google Scholar]
- Enrico, S. Introduction to Battery Management System. Available online: https://www.allaboutcircuits.com/technical-articles/introduction-to-battery-management-systems/ (accessed on 20 June 2021).
- Vulligaddala, B.; Vernekar, S.; Singamla, S.; Brandl, M.; Sriniv, M.B. A 7-Cell, Stackable, Li-Ion Monitoring and Active/Passive Balancing IC With In-Built Cell Balancing Switches for Electric and Hybrid Vehicles. IEEE Trans. Ind. Inform. 2019, 16, 3335–3344. [Google Scholar] [CrossRef]
- Lin, J.C. Development of a two-staged balancing scheme for charging lithium iron cells in series. IET Electr. Syst. Transp. 2016, 6, 145–152. [Google Scholar] [CrossRef]
- Ouyang, Q.; Chen, J.; Zheng, J.; Fang, H. Optimal Cell-to-Cell Balancing Topology Design for Serially Connected Lithium-Ion Battery Packs. IEEE Trans. Sustain. Energy 2017, 9, 350–360. [Google Scholar] [CrossRef]
- Dost, P.; Kipke, V.; Sourkounis, C. Direct active cell balancing with integrated cell monitoring. IET Electr. Syst. Transp. 2019, 9, 244–250. [Google Scholar] [CrossRef]
- Cassani, P.; Williamson, S. Significance of Battery Cell Equalization and Monitoring for Practical Commercialization of Plug-In Hybrid Electric Vehicles. In Proceedings of the Twenty-Fourth Annual IEEE Applied Power Electronics Conference and Exposition, Washington, DC, USA, 15–19 February 2009. [Google Scholar]
- Min, G.H.; Ha, J.I. Active cell balancing algorithm for serially connected li-ion batteries based on power to energy ratio. In Proceedings of the IEEE Energy Conversion Congress and Exposition (ECCE), Cincinnati, OH, USA, 1–5 October 2017; pp. 1550–1558. [Google Scholar]
- Hu, L.; Zhao, M.L.; Wu, X.B.; Lou, J.N. Cell balancing management for battery pack. In Proceedings of the 10th IEEE International Conference on Solid-State and Integrated Circuit Technology, Shanghai, China, 1–4 December 2010. [Google Scholar]
- André, B.; Wolfgang, K.; Stefan, L.; Sven, T.; Thilo, P.; Carsten, T. Scalable, Decentralized battery management system based on self organizing nodes. Archit. Comput. Syst. 2020, 121, 171–184. [Google Scholar]
- Xi, Z.; Dahmardeh, M.; Xia, B.; Fu, Y.; Mi, C. Learning of Battery Model Bias for Effective State of Charge Estimation of Lithium-Ion Batteries. IEEE Trans. Veh. Technol. 2019, 68, 8613–8628. [Google Scholar] [CrossRef]
- Subburaj, A.S.; Bayne, S.B. Analysis of dual polarization battery model for grid applications. In Proceedings of the IEEE 36th International Telecommunications Energy Conference, Vancouver, BC, Canada, 28 September–2 October 2014; pp. 46–53. [Google Scholar]
- Dickson, N.T.H.; Hannan, M.; Hossain, L.; Ker, P. State of Charge Estimation for Lithium-Ion Batteries Using Model-Based and Data-Driven Methods: A Review. IEEE Access 2019, 7, 136116–136136. [Google Scholar]
- Gaizka, S.; José, I.; Inmaculada, Z.; Francisco, J.; Oier, O. Analysis of the current electric battery models for electric vehicle simulation. Energies 2019, 13, 733–760. [Google Scholar]
- Daowd, M.; Omar, N.; Bossche, P.; Mierlo, J. Capacitor Based Battery Balancing System. World Electr. Veh. J. 2012, 5, 385–393. [Google Scholar] [CrossRef] [Green Version]
- Wu, S.L.; Chen, H.C.; Chien, C.H. A Novel Active Cell Balancing Circuit and Charging Strategy in Lithium Battery Pack. Energies 2019, 12, 4473. [Google Scholar] [CrossRef] [Green Version]
- Rong, X.; Bie, Z.; Hua, B.; Wang, J.; Liu, W. Coordinated charging strategy for battery switch station considering battery charging characteristics. In Proceedings of the IEEE PES Asia-Pacific Power and Energy Engineering Conference (APPEEC) 2013, Kowloon, China, 8–11 December 2013. [Google Scholar]
- Hossain, L.; Hannan, B.; Mohamad, H.; Sazal, M.; Indra, M. Intelligent algorithms and control strategies for battery management system in electric vehicles: Progress, challenges and future outlook. J. Clean. Prod. 2021, 292, 745–767. [Google Scholar]
- Yuqing, C.; Yuqiong, K.; Yun, Z.; Li, W.; Jilei, L.; Yanxi, L.; Zheng, L.; Xiangming, H.; Xing, L.; Naser, T.; et al. A review of lithium-ion battery safety concerns: The issues, strategies, and testing standards. ELSEVIER. J. Energy Chem. 2021, 59, 83–99. [Google Scholar]
- Brandl, M.; Gall, H.; Wenger, M.; Lorentz, V.; Fanucci, L.; Roncella, R.; Saletti, R.; Prochazka, W. Batteries and battery management systems for electric vehicles. In Proceedings of the 2012 Design, Automation & Test in Europe Conference & Exhibition, Dresden, Germany, 12–16 March 2012; pp. 971–976. [Google Scholar]
- Pham, V.; Van-Tinh, D.; Choi, W. A Low Cost and Fast Cell-to-Cell Balancing Circuit for Lithium-Ion Battery Strings. Electronics 2020, 9, 248. [Google Scholar] [CrossRef] [Green Version]
- Gabbar, H.; Othman, A.; Muhammad, R.A. Review of Battery Management Systems (BMS) Development and Industrial Standards. Technologies 2021, 9, 28. [Google Scholar] [CrossRef]
- Wang, Q.; Jiang, B.; Li, B.; Yuying, Y. A critical review of thermal management models and solutions of lithium-ion batteries for the development of pure electric vehicles. Renew. Sustain. Energy Rev. 2016, 64, 106–158. [Google Scholar] [CrossRef]
- Aritra, G. Possibilities and challenges for the inclusion of the Electric Vehicle (EV) to reduce the carbon footprint in the transport sector: A review. Energies 2020, 13, 2602. [Google Scholar]
- Ruifeng, Z.; Bizhong, X.; Libo, C.; Yongzhi, L.; Weiwei, Z.; Wei, W. State of the Art of Lithium-Ion Battery SOC Estimation for Electrical Vehicles. Energies 2018, 6, 853–890. [Google Scholar]
- Ankur, B.; Rakesh, K.; Aritra, G. Design of an optimized thermal management system for Li-Ion batteries under different discharging conditions. Energies 2020, 13, 5695. [Google Scholar]
- Clair, B. The Pivotal Role of Battery Management System on the Performance of Electric Vehicles. Available online: https://www.wevolver.com/article/the-pivotal-role-of-battery-management-systems-on-the-performance-of-electric-vehicles (accessed on 10 June 2021).
- Orion, B.M.S. Comparison among Commercially Available BMS. Available online: https://www.orionbms.com/comparison/ (accessed on 24 June 2021).
- Venkatesan, C.; Chandrashekhar, P.; Alagar, K.; Dharmaraj, G.; Robbi, R.; Aritra, G. State of charge estimation of lithium Ion battery for electrical vehicles using machine learning algorithms. World Electr. Veh. J. 2021, 12, 1–17. [Google Scholar]
- Meng, J.; Luo, G.; Ricco, M.; Swierczynski, M.; Daniel-Ioan, S.; Teodorescu, R. Overview of Lithium-Ion battery modeling methods for state-of-charge estimation in electrical vehicles. Appl. Sci. 2018, 8, 659. [Google Scholar] [CrossRef] [Green Version]
- Ricardo, V.; Miguel, B.; José, P.; Sílvio, M. Management System for Large Li-Ion Battery Packs with a New Adaptive Multistage Charging Method. Energies 2017, 21, 455–476. [Google Scholar]
- Daowd, M.; Omar, N.; Peter, V.D.B.; Mierlo, J.V. Passive and active battery balancing comparison based on MATLAB simulation. In Proceedings of the IEEE Vehicle Power and Propulsion Conference 2011, Chicago, IL, USA, 6–9 September 2011; pp. 1–7. [Google Scholar]
- Martin, M. Active Flyback Based Battery Management System with Proportional Balancing for Use in an Electric Race Car. Master’s Thesis, University of Texas at Arlington, Arlington, TX, USA, 2016. [Google Scholar]

















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Features | Battery Cell Methods | Battery Pack Methods | ||
|---|---|---|---|---|
| Highest | Lowest | Highest | Lowest | |
| Precision | Auto-Regressive GPRM | Looking Up Table approach | Bias Correction approach | Big cell Method |
| Cost | Electromechanical Impedance Model | Looking Up Table approach | One by One approach | Big cell Method |
| Computation Time | Electromechanical Model | Looking Up Table approach | Bias Correction approach | Big cell Method |
| Complexity | Looking Up Table approach | Electromechanical Impedance Model | Big cell approach | Bias Correction Method |
| Applicability | Auto-Regressive GPRM | Electromechanical Impedance Model | Bias Correction approach | Big cell Method |
| Method/Models | Adaption | Accuracy | Real Time Usage | Usage without Data |
|---|---|---|---|---|
| Electromechanical | Outstanding | Outstanding | Better | Better |
| Equivalent circuit | Not good | Better | Good | Good |
| Semi-empirical | Not good | Outstanding | Better | Poor |
| Analytical | Unsatisfactory | Satisfied | Unsatisfactory | Unsatisfactory |
| Statistical | Better | Good | Good | Not good |
| BMS Topology | Reliability | Scalability | Flexibility |
|---|---|---|---|
| Centralized | Not satisfactory | Not satisfactory | Not satisfactory |
| Modularized | Neutral | Partially not satisfied | Partially not satisfied |
| Distributed | Partial compliance | Partial compliance | Partial compliance |
| Decentralized | Fully compliance | Fully compliance | Complete fulfillment |
| Type | Advantages | Disadvantages |
|---|---|---|
| Electrochemical model | Accurately represent electrochemical process within the battery; accurate temperature & voltage measurement; better performance; simple; universal reliability | Large computational overheads; needs extensive domain knowledge & longer development time; needs testing under exact conditions; invasive operation needed for some measurements; real time measurement of some applications not possible; parameter identification is difficult |
| Reduced-order electric model | Less computational overhead; parameters identification in real time | Loss of information’s as compared to electrochemical model |
| Equivalent circuit model | Simple; Widely adopted in real time applications; good performance for low SOC range; accurate temperature distribution prediction; universally reliable | Less internal underlying reactions/information; needs testing under exact conditions; invasive operation needed for some measurements; real time measurement of some applications not possible; parameter identification is difficult; requires extensive domain knowledge & longer development time |
| Heat generation model | Widely applied in real-time applications; reliable | Not accurate enough to represent the thermal behavior of battery; needs domain knowledge & longer development time |
| Heat transfer model | Captures temperature distribution; detect hot spots in high-heat generation applications | Large computational overheads for real-time applications; used for offline simulations. |
| Coupled electro-thermal model | Moderately accurate; Moderate physical interpretability | Complex; not suitable in real time applications |
| Data-driven model (Machine Learning Approaches, Filtering Approaches, Stochastic Approaches) | Shorter development time; does not require extensive domain knowledge; high accuracy of voltage calculation 1-Machine Learning Approaches (Simple; good for non-linear systems) 2-Filtering Approaches (Used for state-space model; good for non-linear, Gaussian & non-Gaussian systems) 3-Stochastic Approaches (Considers degradation process time-dependency; Provides uncertainty about results) | Requires large amount of data; unpredictable black box model; efficiency depends on test data & training approaches; difficulty in parameters tuning 1-Machine Learning Approaches (Point estimated RUL, uncertainty about measured results) 2-Filtering Approaches (state-space model required, Point estimated remaining useful life) 3-Stochastic Approaches (Complex, Takes into account uncertain factors) |
| Hybrid approaches (Series/Parallel) | Highly accurate; reliable; robust | Reliable only for certain situations & for defined time period. |
| Empirical models | Simple, computationally efficient | Limited capability of describing the terminal voltage |
| Approach | Issues |
|---|---|
| Constant current (CC) | Low capacity utilization |
| Constant current (CC) | Battery lattice may collapse |
| Constant current-constant voltage (CC-CV) | Balancing issues for charging speed, energy loss & temperature variations |
| Multi stage constant current (MCC) | Balancing issues for charging speed, capacity utilization & battery lifetime |
| Features | Orion BMS | Lithiumate Pro | MK 3*8 | Mini BMS |
|---|---|---|---|---|
| Overcharge/discharge, thermal & overcurrent protection | Capable | Capable | Capable | Capable |
| Cell & Pack Health Monitoring | Capable | Capable | In capable | In capable |
| Cell balancing | Capable | Capable | Capable | Capable |
| Field Programmable | Capable | Capable | Capable | In capable |
| SOC monitoring | Capable | Capable | Optional | Separate |
| Charge/discharge current limits | Capable | Capable | In capable | In capable |
| Cell & Pack Internal Resistances | Capable | Capable | In capable | In capable |
| Trouble codes w/OBD-II freeze frame | Capable | In capable | In capable | In capable |
| Simulation of ‘virtual’ PHEV battery | Capable | Capable | In capable | In capable |
| Programmable OBD-II support | Capable | In capable | In capable | In capable |
| Centralized Design | Capable | In capable | In capable | In capable |
| Supports external thermistors | Capable | In capable | Capable | In capable |
| CANBUS Interfaces | 2 interfaces | 1 interface | In capable | In capable |
| Isolation Fault Detection | Capable | Optional | In capable | In capable |
| Automotive grade locking connectors | Capable | In capable | In capable | In capable |
| Easy to disconnect from battery | Capable | In capable | Capable | In capable |
| Supports dual ranging current sensors | Capable | In capable | In capable | In capable |
| Programmable structure for all CAN messages | Capable | In capable | In capable | In capable |
| Software for data logging & programming | Capable | In capable | In capable | In capable |
| Cell voltage sampling rate | 30 ms | 600–10,000 ms | 62.5 ms per cell | N/A |
| Cell voltage measuring range | 0.5–5 v | 2.04–4.54 v | 1.25–6.0 v | N/A |
| Topologies | Advantages | Disadvantage | Applications | Balancing Speed | Elements Needed to Balance n Cell | Charge/Discharge |
|---|---|---|---|---|---|---|
| Fixed shunt resistor | Simple; low cost | Continuous energy dissipation reduces life span; effective for a small number of cells only; no controlled operation; excess heat generation; inefficient | Appropriate for nickel and lead-acid batteries low power applications | Satisfactory | n resistors | Fixed |
| Controlled shunt resistor | Simple; reliable; low cost; more efficient | Excess energy diffused as heat, so short battery life; energy losses coz of high balance current; balancing speed is slow; useful during charging only | Appropriate for LIBs; low power applications; suitable for EVs when 10 mA/Ah balancing current | Good | n resistors; n switches | Bi-directional |
| Category/ Topology | Advantages | Disadvantages | Cost | Balancing Speed/ Efficiency for N-Cells | Complexity in Control/Implementation for N-Cells |
|---|---|---|---|---|---|
| Cell bypass | High balancing efficiency; very fast and flexible; small size; used for low power applications; easy to perform; simple to modify | High current switches; decrease battery efficiency during normal operation; generally used at the end of the charge/discharge process when effectiveness is low | Low | high/ moderate | Simple/ simple |
| Cell to cell | Moderate efficiency; For switched capacitors& inductors (controlling balancing current not possible, so slow balancing speed); For qusia resonant scheme (higher effectiveness due to soft switching, but slow balancing speed) | Bulky; complex control; switch network | Moderate | moderate/ moderate | High/ moderate |
| Cell to pack | Secure; no energy lost | Slow balancing speed, especially for low voltage cells; high cost | High | Low/ average | Complex/ simple |
| Pack to cell | Relatively simple; good efficiency; fast | Slow balancing speed, especially for high voltage cells; complex; switch network; high isolation voltage of DC/DC | High | Low/ low | Complex/ moderate |
| Cell to pack to cell | Faster than the cell-to-pack and pack-to-cell, but still slow balancing speed | Topologies based on DC/DC converters are complex & costly; low efficiency | High | Average/ average | Simple/ high |
| Scheme/ Technique | Benefits | Disadvantages | Elements Required to Balance n Cells/Balancing Speed | Charge & Discharge Strategy/ Control Strategy | Cost/ Size |
|---|---|---|---|---|---|
| Complete Shunting (Cell Bypass) | High efficiency; low switch voltage stress; negligible power loss | low power applications; high switch current stress; wide voltage range for converters | 4 n switches /high | Bidirectional/ medium | Low/small |
| Shunting Resistor (Cell Bypass) | Easy implementation; high speed | low power applications; low efficiency | n resistor /satisfactory | Fixed/easy | Low/small |
| Shunting Transistor (Cell Bypass) | high speed, less complex; easily modular | Less efficiency; low power applications | medium | Bidirectional/ Medium | Low/small |
| Single Switched Capacitor (Cell-to-Cell) | Efficient; low complexity; possibility of low and high power applications; low switch voltage stress; no closed-loop control | Difficult modularity; high switch voltage stress; highly complex | 1 resistor, 1 capacitor, n + 5 switches /moderate | Bidirectional/hard | High/large |
| Double-tiered Switching (Cell-to-Cell) | Lower balancing capacity currents; high power applications; easily modularized | Relatively low speed; high switch current stress | n capacitors, 2n switches/satisfactory | Bidirectional/ Moderate | High/large |
| Cûk converter (Cell-to-Cell) | Lower balancing currents; relatively efficient; high power applications; low switch voltage/current stress | High control complexity; low implementation | n + 1 inductors, n + 1 switches, n − 1 capacitors /satisfactory | Bidirectional/hard | Medium/ medium |
| PMW controlled converter (Cell-to-cell) | Allows high power applications; efficient; low-speed | Complex; relatively low switch voltage/ current stress | n inductors, n capacitors, 2n switches /low | Bidirectional/ hard | Medium/ small |
| Quasi-Resonant Converter (Cell-to-Cell) | High power applications; low switch voltage/current stress; high efficiency; simple implementation | High control complexity | n inductors, n capacitors, 2n switches/ low | Bidirectional/ hard | high/ large |
| Shunting inductor (Cell-to-Pack) | High power applications; relatively low switch current/voltage stress | Very slow; highly complex; difficult modularity | n − 1 inductor, 2n − 2 diodes/ medium | Bidirectional/ hard | Low/ small |
| Boost shunting (Cell-to- Pack) | High power applications; efficient; easy modular design; low switch voltage/current stress | High control complexity | high | Bidirectional/hard | High/ small |
| Multi-secondary winding transformer (Cell-to-Pack) | Allows high power applications; relatively high switch voltage stress; low switch current stress | Less efficient; difficult modularity; control complexity; limited number of cells | 1 winding transformer, n + 1 inductors, 2 switches/low | Charge only/ hard | High/ large |
| Multiple transformers (Cell-to-Pack) | Allows high power applications; easily modularized; fast equalization speed | Less efficient; high complexity; relatively high switch voltage/current stress | n diodes, 1 switch, 2n inductors, n winding transformers/ satisfactory | Bidirectional/ hard | High/ large |
| Modularized- Switching transformer (Cell-to-Pack) | High power applications; relatively highly modular; low switching voltage/current stress | High control complexity; less efficient | Low | Bidirectional/ hard | High/ large |
| Voltage multiplier (Pack-to-Cell) | High power applications; high efficiency; modular | High switch voltage/current stress | high | Bidirectional/easy | low/ moderate |
| Full-bridge converter (Pack-to-Cell) | High efficiency; easy modularity; high power applications; low switch voltage/current stress | High control complexity | n capacitors, 4n switches/ high | Bidirectional/ hard | High/ large |
| Multiple transformers (Pack-to-Cell) | High power applications; low complexity; fast equalization speed | Slow; expensive; less efficient | n diodes, 1 switch, 2n inductors, n winding transformers/satisfactory | Bidirectional/ hard | High/ large |
| Multi-secondary windings transformer (Pack-to-Cell) | High power applications; high speed/ implementation; low switch current stress | Less efficient; control complexity; difficult modularity | 1 winding transformer, n + 1 inductors, 2 switches/low | Charge only/ hard | High/ large |
| Switched transformer (Pack-to-Cell) | High power applications; low switch voltage/current stress; fast equalization speed | Less efficient; high control complexity | n + 3 switches, 1 transformer/high | Bidirectional/hard | High/ large |
| PMW controlled Converter (Cell-to-Pack-to-Cell) | high power applications; high efficiency /speed/implementation | Less speed; relatively high switch voltage/current stress; high control complexity | n inductors, n capacitors, 2n switches /high | hard | High/large |
| Single switched Capacitor (Cell-to-Pack-to-Cell) | high efficiency; low switch voltage stress; applicable in high power applications | Low balancing speed; high control complexity | 1 resistor, 1 capacitor, n + 5 switches/low | Bidirectional/hard | Medium/ small |
| Single switched inductor (Cell-to-Pack-to-cell) | high efficiency; low switch voltage stress; applicable in high power applications | Slow balancing speed; increased complexity | 2n switches, 2n − 2 diodes/ low | Bidirectional/hard | Medium/ medium |
| Bi-directional multiple transformers (Cell-to-Pack-to-Cell) | Allows high power applications; easy modularity | Less efficient; relatively high switch voltage/current stress | n diodes, 1 switch, 2n inductors, n winding transformers /satisfactory | Bidirectional/hard | High/large |
| Bi-directional multi- secondary windings transformer (Cell-to-Pack-to-Cell) | High power applications; relatively high speed/implementation; low switch current stress | Less efficient; complex | 1 winding transformer, n + 1 inductors, 2 switches /medium | Bidirectional/hard | High/large |
| Bidirectional switched Transformer (Cell-to-Pack-to-Cell) | Relatively high speed; allows high power applications; low switch current/voltage stress, and modularity | Less efficient; complex | n + 3 switches, 1 transformer/ medium | Bidirectional/hard | High/large |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Uzair, M.; Abbas, G.; Hosain, S. Characteristics of Battery Management Systems of Electric Vehicles with Consideration of the Active and Passive Cell Balancing Process. World Electr. Veh. J. 2021, 12, 120. https://doi.org/10.3390/wevj12030120
Uzair M, Abbas G, Hosain S. Characteristics of Battery Management Systems of Electric Vehicles with Consideration of the Active and Passive Cell Balancing Process. World Electric Vehicle Journal. 2021; 12(3):120. https://doi.org/10.3390/wevj12030120
Chicago/Turabian StyleUzair, Muhammad, Ghulam Abbas, and Saleh Hosain. 2021. "Characteristics of Battery Management Systems of Electric Vehicles with Consideration of the Active and Passive Cell Balancing Process" World Electric Vehicle Journal 12, no. 3: 120. https://doi.org/10.3390/wevj12030120