
A Fast Lithium-Ion Battery Impedance and SOC Estimation Method Based on Two-Stage PI Observer

Abstract
:1. Introduction
2. SOC Estimation Based on PI Observers
2.1. Introduction of the Electrochemical Battery Model
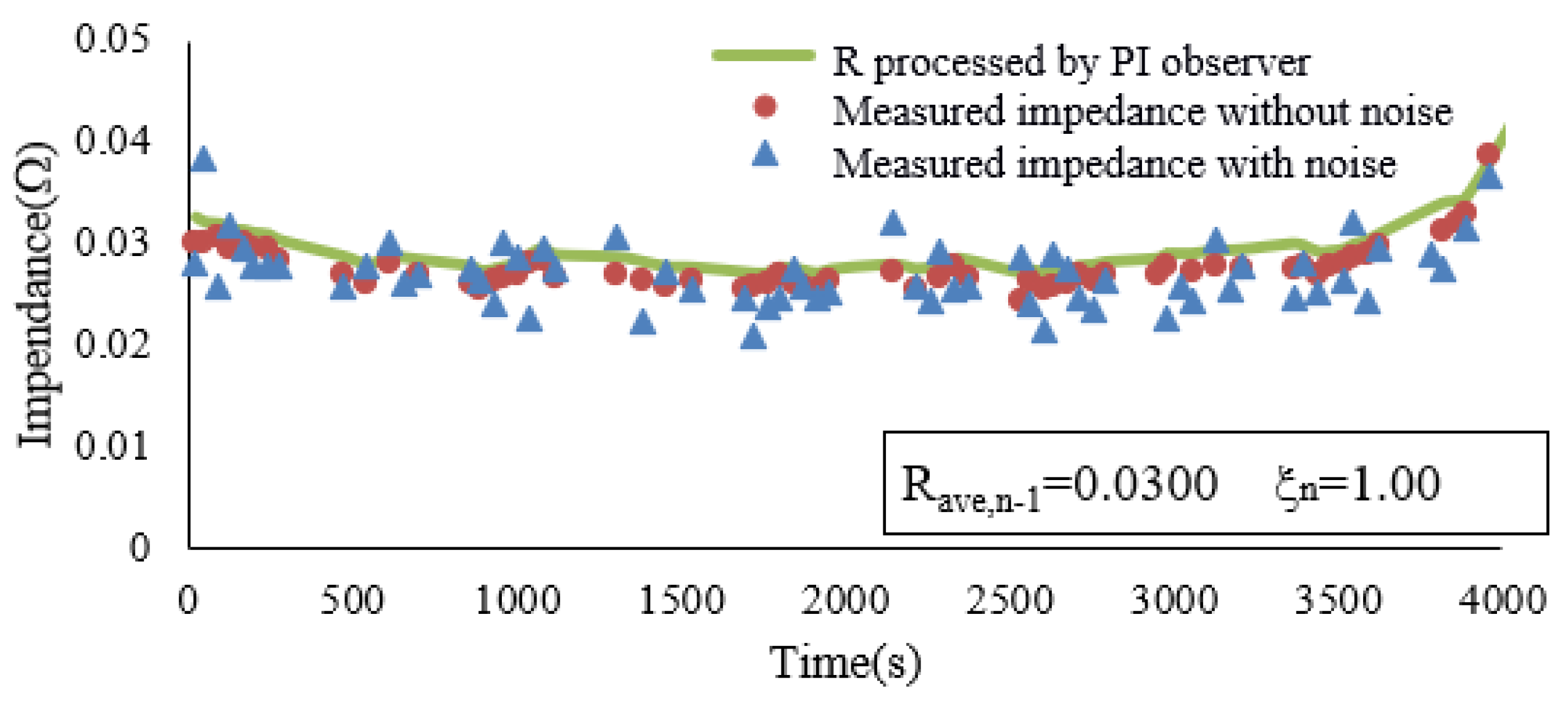
2.2. First-Level PI Observer for Impedance Estimation
2.3. Second-Level PI Observer for SOC Estimation
3. Verification and Discussion
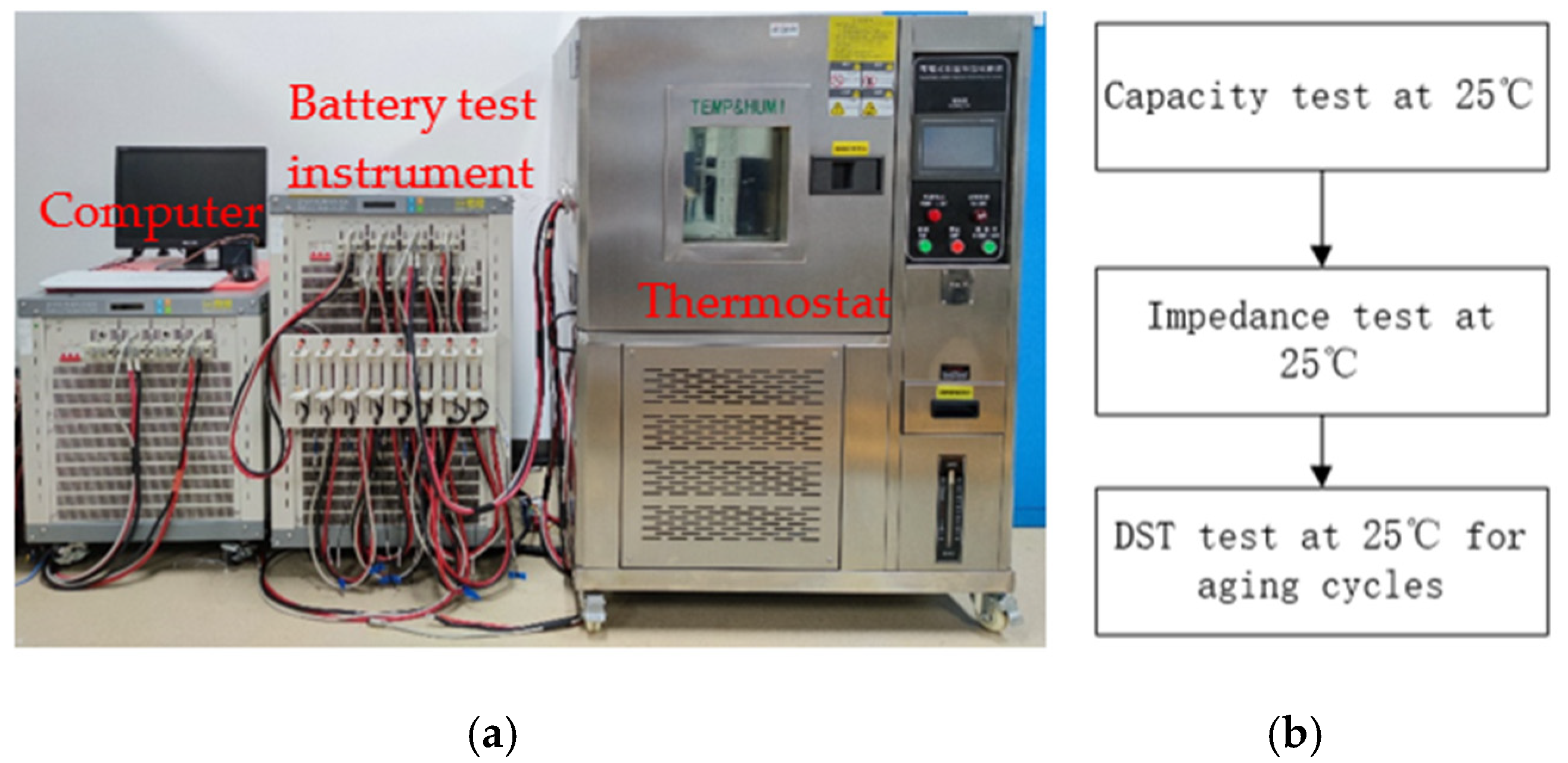
3.1. Experiment Design
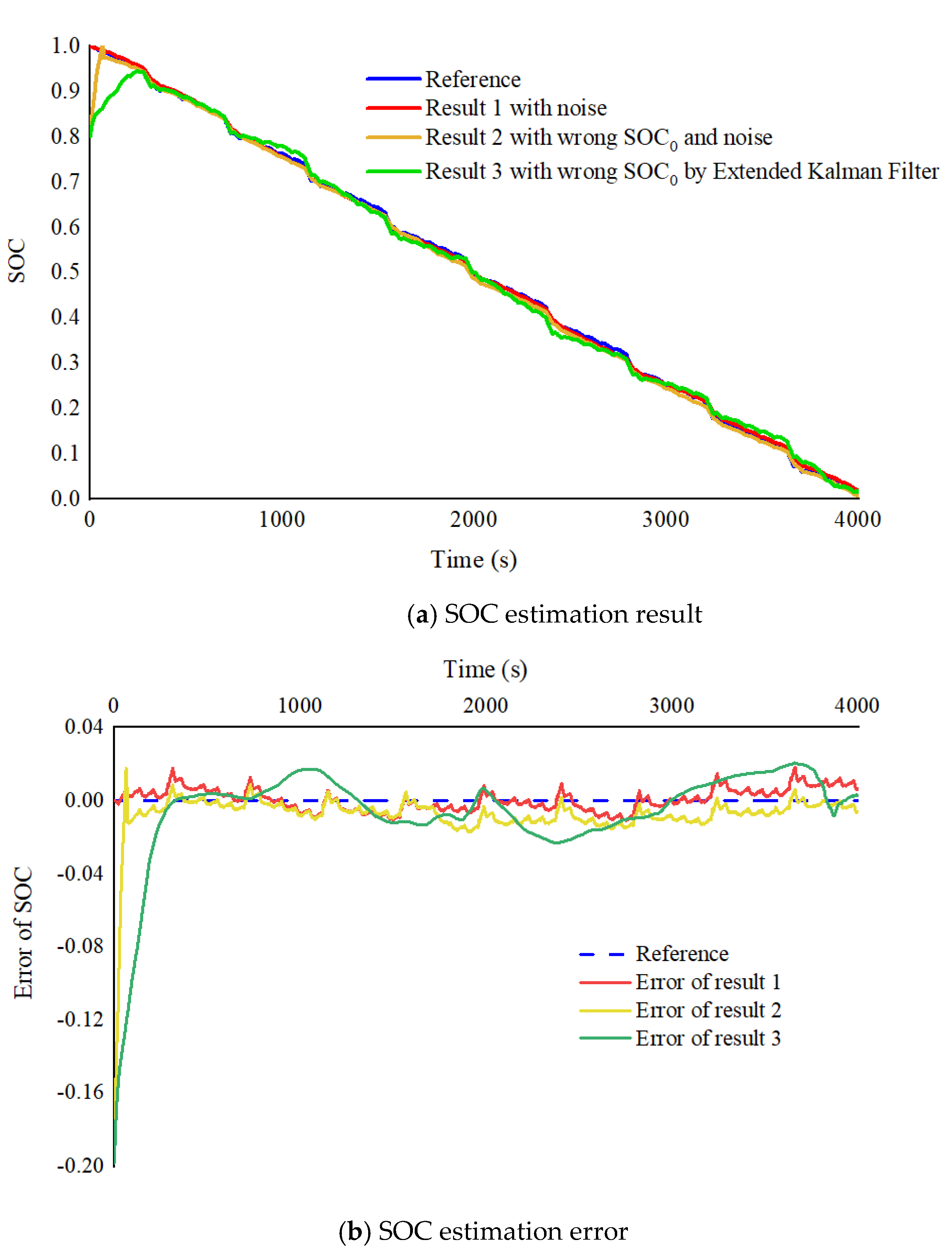
3.2. Verification and the Results
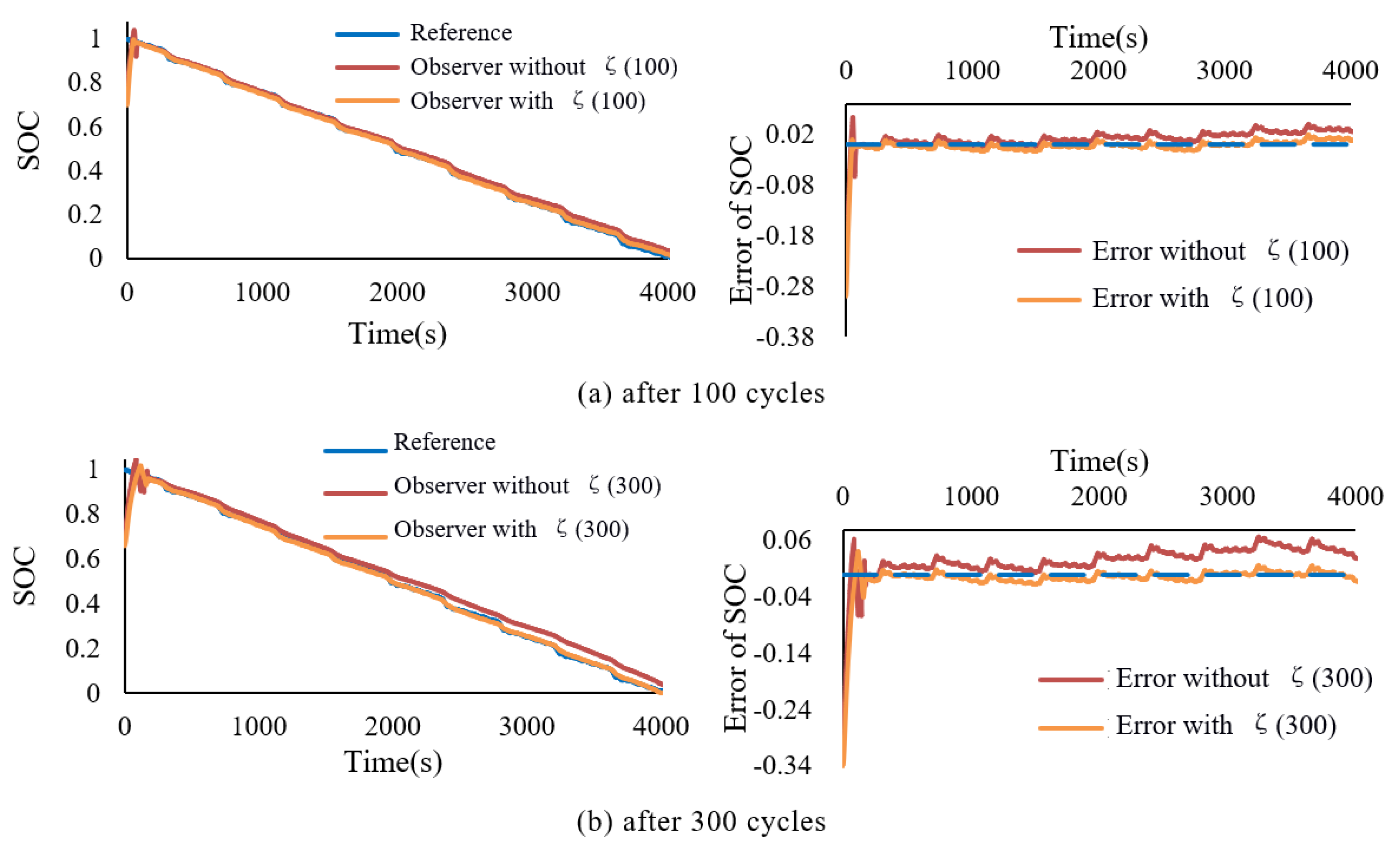
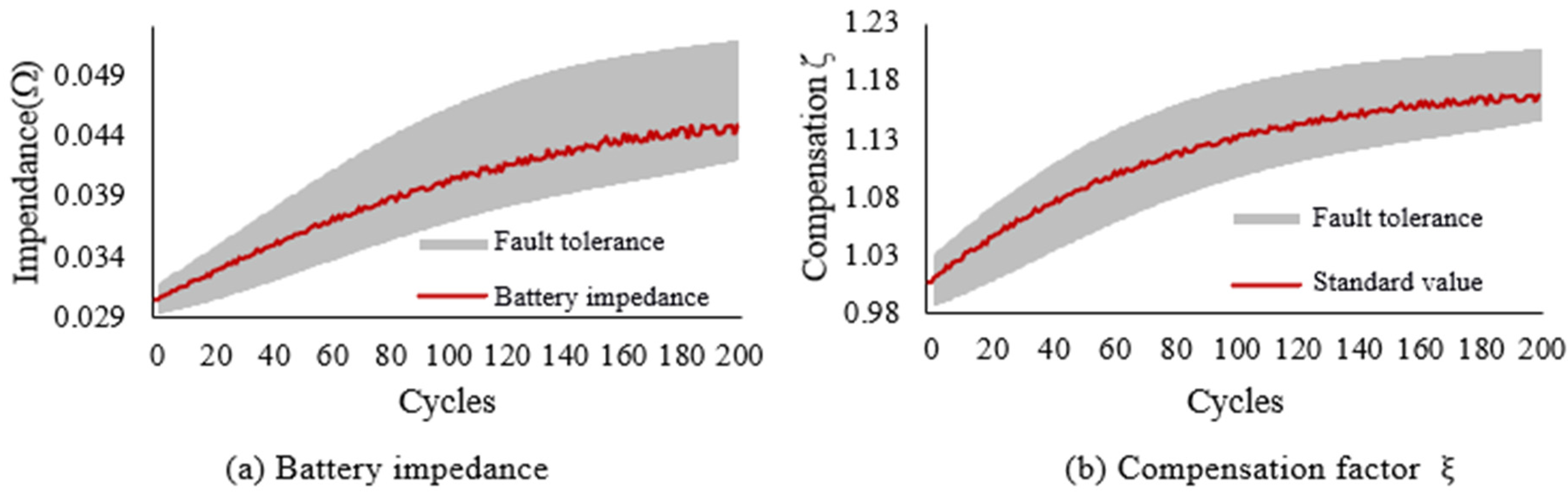
3.3. Analysis for Fault Tolerance of the Factor ξ
4. Conclusions
- The experimental results show that the two-stage PI observer method can obtain reliable data results in the presence of unknown initial SOC, current drift, measurement noise, or inaccurate battery capacity.
- The compensation factor can adjust the model parameters online according to the battery usage, compensate part of the capacity loss and keep the system robust.
- The proposed SOC estimation method is capable of obtaining satisfactory accuracy in different use states for test batteries. The SOC error can be kept within 2%.
- The proposed SOC and battery impedance estimation have a simple structure and are easy to implement.
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Hannan, M.A.; Hoque, M.; Hussain, A.; Yusof, Y.; Ker, P.J. State-of-the-art and energy management system of lithium-ion batteries in electric vehicle applications: Issues and recommendations. IEEE Access 2018, 6, 19362–19378. [Google Scholar] [CrossRef]
- Liu, P.; Zhu, H.H.; Chen, J.; Li, G.Y. A distributed management system for lithium ion battery pack. In Proceedings of the 2016 Chinese Control and Decision Conference (CCDC), Yinchuan, China, 28–30 May 2016; pp. 3997–4002. [Google Scholar]
- Yang, X.; Chen, Y.; Li, B.; Luo, D. Battery states online estimation based on exponential decay particle swarm optimization and proportional-integral observer with a hybrid battery model. Energy 2020, 191, 116509. [Google Scholar] [CrossRef]
- Li, Y.; Sheng, H.; Cheng, Y.; Stroe, D.-I.; Teodorescu, R. State-of-health estimation of lithium-ion batteries based on semi-supervised transfer component analysis. Appl. Energy 2020, 277, 115504. [Google Scholar] [CrossRef]
- Lai, X.; He, L.; Wang, S.Y.; Zhou, L.; Zhang, Y.F.; Sun, T.; Zheng, Y.J. Co-estimation of state of charge and state of power for lith-ium-ion batteries based on fractional variable-order model. J. Clean. Prod. 2020, 255, 120203. [Google Scholar] [CrossRef]
- Zhang, X.; Wang, Y.; Wu, J.; Chen, Z. A novel method for lithium-ion battery state of energy and state of power estimation based on multi-time-scale filter. Appl. Energy 2018, 216, 442–451. [Google Scholar] [CrossRef]
- Xiong, R.; Shen, W. Advanced Battery Management Technologies for Electric Vehicles; John Wiley & Sons: Hoboken, NJ, USA, 2018. [Google Scholar]
- Wang, Y.; Tian, J.; Sun, Z.; Wang, L.; Xu, R.; Li, M.; Chen, Z. A comprehensive review of battery modeling and state estimation approaches for advanced battery management systems. Renew. Sustain. Energy Rev. 2020, 131, 110015. [Google Scholar] [CrossRef]
- A Hannan, M.; Lipu, M.S.H.; Hussain, A.; Mohamed, A. A review of lithium-ion battery state of charge estimation and management system in electric vehicle applications: Challenges and recommendations. Renew. Sustain. Energy Rev. 2017, 78, 834–854. [Google Scholar] [CrossRef]
- Zhang, Y.; Song, W.; Lin, S.; Feng, Z. A novel model of the initial state of charge estimation for LiFePO4 batteries. J. Power Sources 2014, 248, 1028–1033. [Google Scholar] [CrossRef]
- Xiong, R.; Yu, Q.; Wang, L.Y. Open circuit voltage and state of charge online estimation for lithium ion batteries. Energy Procedia 2017, 142, 1902–1907. [Google Scholar] [CrossRef]
- Kuipers, M.; Schröer, P.; Nemeth, T.; Zappen, H.; Blömeke, A.; Sauer, D.U. An algorithm for an online electrochemical impedance spectroscopy and battery parameter estimation: Development, verification and validation. J. Energy Storage 2020, 30, 101517. [Google Scholar] [CrossRef]
- Keil, J.; Jossen, A. Electrochemical modeling of linear and nonlinear aging of lithium-ion cells. J. Electrochem. Soc. 2020, 167, 110535. [Google Scholar] [CrossRef]
- Shrivastava, P.; Soon, T.K.; Bin Idris, M.Y.I.; Mekhilef, S. Overview of model-based online state-of-charge estimation using Kalman filter family for lithium-ion batteries. Renew. Sustain. Energy Rev. 2019, 113, 109233. [Google Scholar] [CrossRef]
- Zhu, R.; Duan, B.; Zhang, J.; Zhang, Q.; Zhang, C. Co-estimation of model parameters and state-of-charge for lithium-ion batteries with recursive restricted total least squares and unscented Kalman filter. Appl. Energy 2020, 277, 115494. [Google Scholar] [CrossRef]
- Zhao, Y.; Xu, J.; Wang, X.; Mei, X. The adaptive fading extended Kalman filter SOC estimation method for lithium-ion batteries. Energy Procedia 2018, 145, 357–362. [Google Scholar] [CrossRef]
- Chen, Z.; Sun, H.; Dong, G.; Wei, J.; Wu, J. Particle filter-based state-of-charge estimation and remaining-dischargeable-time prediction method for lithium-ion batteries. J. Power Sources 2019, 414, 158–166. [Google Scholar] [CrossRef]
- Zhao, X.; Xuan, D.; Zhao, K.; Li, Z. Elman neural network using ant colony optimization algorithm for estimating of state of charge of lithium-ion battery. J. Energy Storage 2020, 32, 101789. [Google Scholar] [CrossRef]
- Hu, L.; Hu, X.; Che, Y.; Feng, F.; Lin, X.; Zhang, Z. Reliable state of charge estimation of battery packs using fuzzy adaptive federated filtering. Appl. Energy 2020, 262, 114569. [Google Scholar] [CrossRef]
- Ning, B.; Cao, B.G.; Wang, B.; Zou, Z.Y. Adaptive sliding mode observers for lithium-ion battery state estimation based on pa-rameters identified online. Energy 2018, 153, 732–742. [Google Scholar] [CrossRef]
- Han, W.; Zou, C.; Zhou, C.; Zhang, L. Estimation of cell SOC evolution and system performance in module-based battery Charge equalization systems. IEEE Trans. Smart Grid 2018, 10, 4717–4728. [Google Scholar] [CrossRef]
- Meng, J.; Ricco, M.; Acharya, A.B.; Luo, G.; Swierczynski, M.; Stroe, D.-I.; Teodorescu, R. Low-complexity online estimation for LiFePO4 battery state of charge in electric vehicles. J. Power Sources 2018, 395, 280–288. [Google Scholar] [CrossRef]
- Tang, X.; Wang, Y.; Chen, Z. A method for state-of-charge estimation of LiFePO4 batteries based on a dual-circuit state observer. J. Power Sources 2015, 296, 23–29. [Google Scholar] [CrossRef]
- Li, Y.; Vilathgamuwa, D.M.; Farrell, T.; Choi, S.S.; Tran, N.T.; Teague, J. A physics-based distributed-parameter equivalent circuit model for lithium-ion batteries. Electrochim. Acta 2019, 299, 451–469. [Google Scholar] [CrossRef]
- Li, Y.; Xiong, B.; Vilathgamuwa, D.M.; Wei, Z.; Xie, C.; Zou, C. Constrained ensemble Kalman filter for distributed electrochemical state estimation of lithium-ion batteries. IEEE Trans. Ind. Inform. 2020, 17, 240–250. [Google Scholar] [CrossRef]
- Meng, J.; Luo, G.; Ricco, M.; Swierczynski, M.; Stroe, D.-I.; Teodorescu, R. Overview of lithium-ion battery modeling methods for state-of-charge estimation in electrical vehicles. Appl. Sci. 2018, 8, 659. [Google Scholar] [CrossRef] [Green Version]
- Hung, M.-H.; Lin, C.-H.; Lee, L.-C.; Wang, C.-M. State-of-charge and state-of-health estimation for lithium-ion batteries based on dynamic impedance technique. J. Power Sources 2014, 268, 861–873. [Google Scholar] [CrossRef]
- Tang, X.; Zou, C.; Yao, K.; Chen, G.; Liu, B.; He, Z.; Gao, F. A fast estimation algorithm for lithium-ion battery state of health. J. Power Sources 2018, 396, 453–458. [Google Scholar] [CrossRef]
- Plett, G.L. Extended Kalman filtering for battery management systems of LiPB-based HEV battery packs—Part 2. Modeling and identification. J. Power Sources 2004, 134, 262–276. [Google Scholar] [CrossRef]














{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Group | Discharge Condition | |
|---|---|---|
| 1 | ||
| 2 | ||
| 3 | ||
| Battery type | ISR18650PC |
| Battery capacity | 2.6 Ah |
| Working voltage | 4.2–2.75 V |
| Maximum continuous discharge current | 15 A |
| Initial Impedance | ≤30.0 mΩ |
| Parameter | Value |
|---|---|
| E0 | 3.459 |
| k0 | −0.039 |
| k1 | 0.001 |
| k2 | 0.066 |
| k3 | −0.070 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Chen, T.; Huo, M.; Yang, X.; Wen, R. A Fast Lithium-Ion Battery Impedance and SOC Estimation Method Based on Two-Stage PI Observer. World Electr. Veh. J. 2021, 12, 108. https://doi.org/10.3390/wevj12030108
Chen T, Huo M, Yang X, Wen R. A Fast Lithium-Ion Battery Impedance and SOC Estimation Method Based on Two-Stage PI Observer. World Electric Vehicle Journal. 2021; 12(3):108. https://doi.org/10.3390/wevj12030108
Chicago/Turabian StyleChen, Tao, Mengmeng Huo, Xiaolong Yang, and Rui Wen. 2021. "A Fast Lithium-Ion Battery Impedance and SOC Estimation Method Based on Two-Stage PI Observer" World Electric Vehicle Journal 12, no. 3: 108. https://doi.org/10.3390/wevj12030108