Predicting Electric Vehicle Consumption: A Hybrid Physical-Empirical Model †


Abstract
:1. Introduction
2. Literature Review
3. The Dataset: Working with Real Empirical Data
Cleaning the Data
4. Models
4.1. Basic Physical Model
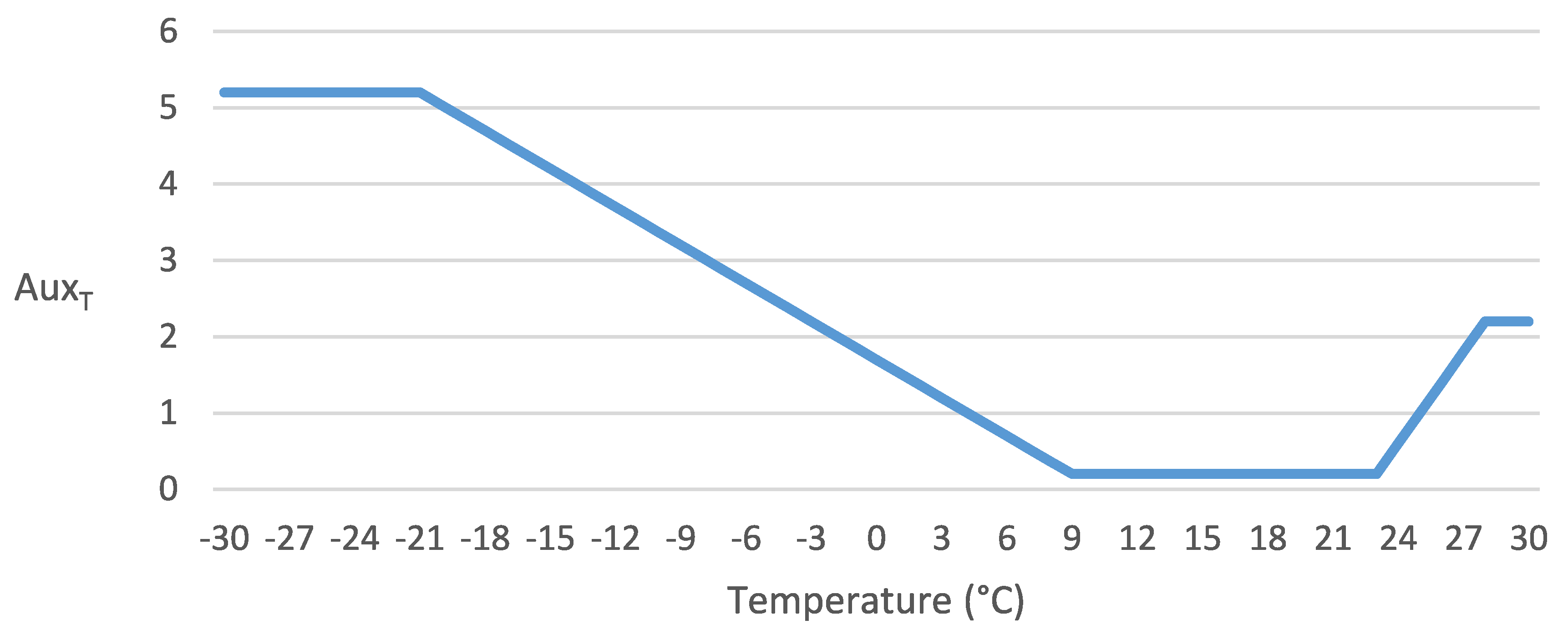
4.2. Extended Physical Model
4.3. Fitted Extended Physical Model
4.4. Learned Empirical Model
4.5. Hybrid Model
4.6. Adding Interaction Terms into the Hybrid and Learned Empirical Models
4.6.1. Interaction Terms for the Learned Empirical Model
4.6.2. Interaction Terms for the Hybrid Model
5. Experiments
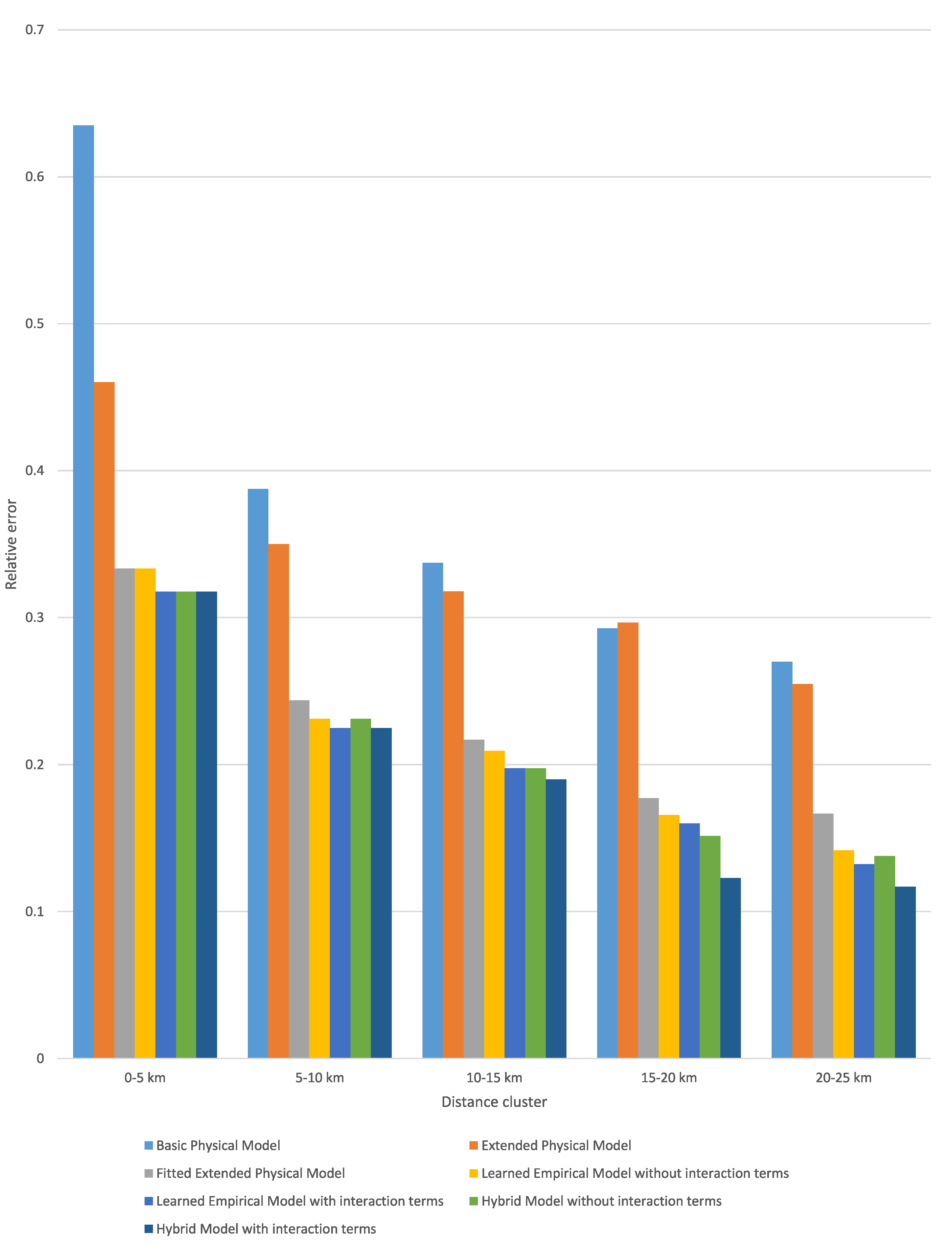
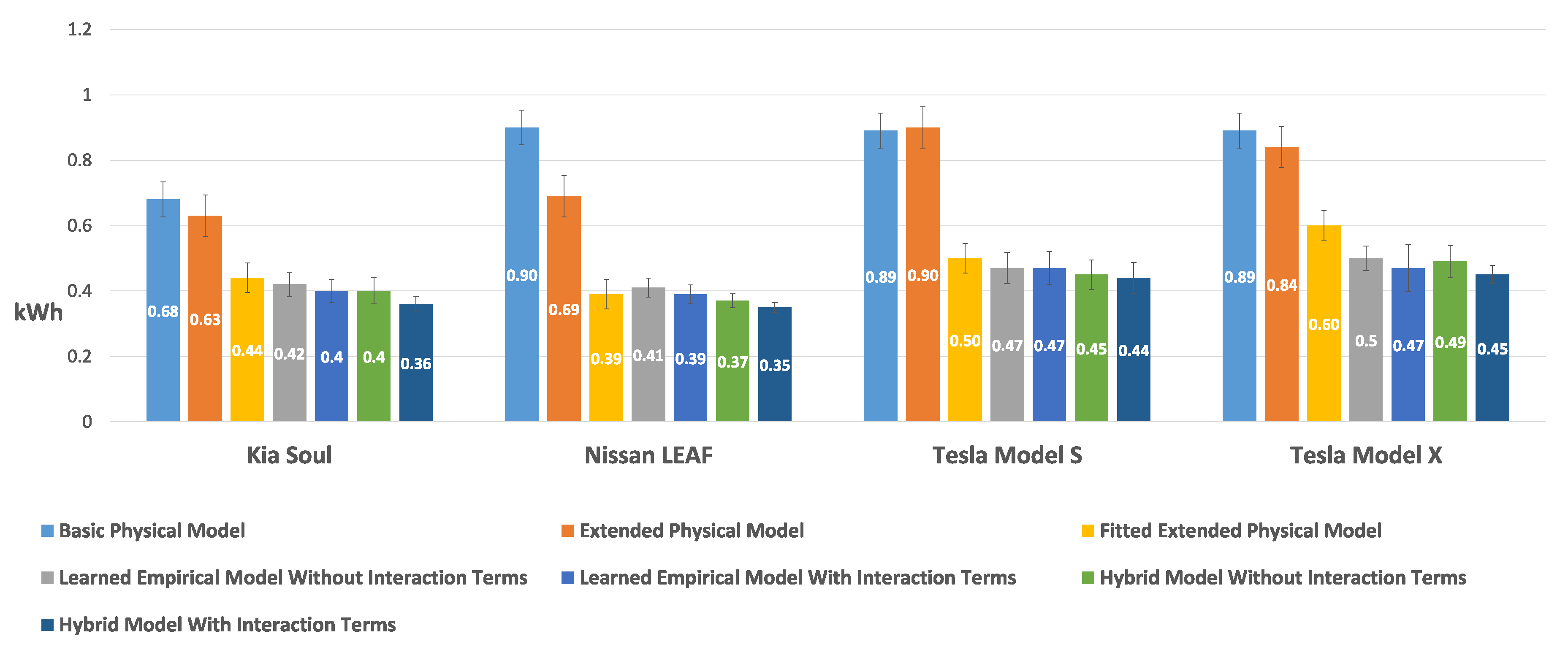
5.1. Results
5.2. Removing Unnecessary Terms
5.2.1. Removing Terms Using Recursive Feature Elimination, Cross-Validated (RFECV)
5.2.2. Removing Terms Using Recursive Feature Elimination (RFE)
5.3. Predicting Consumption for a New Vehicle
6. Conclusions
Author Contributions
Funding
Conflicts of Interest
References
- Messagie, M.; Boureima, F.S.; Coosemans, T.; Macharis, C.; Mierlo, J. A Range-Based Vehicle Life Cycle Assessment Incorporating Variability in the Environmental Assessment of Different Vehicle Technologies and Fuels. Energies 2014, 7, 1467–1482. [Google Scholar] [CrossRef]
- De Cauwer, C.; Maarten, M.; Heyvaert, S.; Coosemans, T.; Van Mierlo, J. Electric Vehicle Use and Energy Consumption Based on Realworld Electric Vehicle Fleet Trip and Charge Data and Its Impact on Existing EV Research Models. World Electr. Veh. J. 2015, 7, 436–446. [Google Scholar] [CrossRef] [Green Version]
- Fiori, C.; Ahn, K.; Rakha, H.A. Power-based electric vehicle energy consumption model: Model development and validation. Appl. Energy 2016, 168, 257–268. [Google Scholar] [CrossRef]
- Fontaras, G.; Zacharof, N.G.; Ciuffo, B. Fuel consumption and CO2 emissions from passenger cars in Europe–Laboratory versus real-world emissions. Prog. Energy Combust. Sci. 2017, 60, 97–131. [Google Scholar] [CrossRef]
- De Cauwer, C.; Verbeke, W.; Coosemans, T.; Faid, S.; Van Mierlo, J. A Data-Driven Method for Energy Consumption Prediction and Energy-Efficient Routing of Electric Vehicles in Real-World Conditions. Energies 2017, 10, 608. [Google Scholar] [CrossRef] [Green Version]
- Green Race 2.0. Available online: https://www.jurassictest.com/greenrace-2 (accessed on 22 February 2019).
- Laurikko, J.; Granstrom, R.; Haakana, A. Realistic estimates of EV range based on extensive laboratory and field tests in Nordic climate conditions. In Proceedings of the IEEE 2013 World Electric Vehicle Symposium and Exhibition (EVS27), Barcelona, Spain, 17–20 November 2013; pp. 1–12. [Google Scholar] [CrossRef] [Green Version]
- Lajunen, A. Evaluation of energy consumption and carbon dioxide emissions for electric vehicles in Nordic climate conditions. In Proceedings of the 2018 Thirteenth International Conference on Ecological Vehicles and Renewable Energies (EVER), Monte Carlo, Monaco, 10–12 April 2018; pp. 1–7. [Google Scholar] [CrossRef]
- Deschenes, A.; Gaudreault, J.; Rioux-Paradis, K. Predicting electric vehicle consumption: A physical model that fits. In Proceedings of the 32nd International Electric Vehicle Symposium & Exposition (EVS 32), Lyon, France, 19–22 May 2019; p. 7. [Google Scholar]
- Kambly, K.; Bradley, T.H. Geographical and temporal differences in electric vehicle range due to cabin conditioning energy consumption. J. Power Sources 2015, 275, 468–475. [Google Scholar] [CrossRef]
- Chen, T.D.; Kockelman, K.M.; Hanna, J.P. Operations of a shared, autonomous, electric vehicle fleet: Implications of vehicle & charging infrastructure decisions. Transp. Res. Part A Policy Pract. 2016, 94, 243–254. [Google Scholar]
- Bischoff, J.; Maciejewski, M. Agent-based simulation of electric taxicab fleets. Transp. Res. Procedia 2014, 4, 191–198. [Google Scholar] [CrossRef] [Green Version]
- Hu, J.; Morais, H.; Sousa, T.; Lind, M. Electric vehicle fleet management in smart grids: A review of services, optimization and control aspects. Renew. Sustain. Energy Rev. 2016, 56, 1207–1226. [Google Scholar] [CrossRef] [Green Version]
- Wager, G.; McHenry, M.P.; Whale, J.; Bräunl, T. Testing energy efficiency and driving range of electric vehicles in relation to gear selection. Renew. Energy 2014, 62, 303–312. [Google Scholar] [CrossRef]
- De Cauwer, C.; Van Mierlo, J.; Coosemans, T. Energy Consumption Prediction for Electric Vehicles Based on Real-World Data. Energies 2015, 8, 8573–8593. [Google Scholar] [CrossRef]
- Yao, E.; Yang, Z.; Song, Y.; Zuo, T. Comparison of electric vehicle’s energy consumption factors for different road types. Discret. Dyn. Nat. Soc. 2013. [Google Scholar] [CrossRef]
- Moreno, A.T.; Michalski, A.; Llorca, C.; Moeckel, R. Shared Autonomous Vehicles Effect on Vehicle-Km Traveled and Average Trip Duration. J. Adv. Transp. 2018. [Google Scholar] [CrossRef] [Green Version]
- The Truth About Electric Vehicles in Cold Weather. Available online: https://fr.slideshare.net/fleetcarma/the-truth-about-electric-vehicles-in-cold-weather (accessed on 17 July 2018).
- Erdinc, O.; Vural, B.; Uzunoglu, M. A dynamic lithium-ion battery model considering the effects of temperature and capacity fading. In Proceedings of the IEEE 2009 International Conference on Clean Electrical Power, Capri, Italy, 9–11 June 2009; pp. 383–386. [Google Scholar] [CrossRef]
- Grunditz, E.A.; Thiringer, T. Performance Analysis of Current BEVs Based on a Comprehensive Review of Specifications. IEEE Trans. Trans. Electr. 2016, 2, 270–289. [Google Scholar] [CrossRef]
- Jaccard, J.; Turrisi, R. Interaction Effects in Multiple Regression; Sage: London, UK, 2003; Volume 72. [Google Scholar]
- Kulas, J.T.; Robinson, D.H.; Smith, J.A.; Kellar, D.Z. Post-Stratification Weighting in Organizational Surveys: A Cross-Disciplinary Tutorial. Hum. Resour. Manag. 2018, 57, 419–436. [Google Scholar] [CrossRef]
- Triola, M.F. Elementary Statistics; Addison Wesley Publishing Company: Boston, MA, USA, 1992. [Google Scholar]
- Blumer, A.; Ehrenfeucht, A.; Haussler, D.; Warmuth, M.K. Occam’s razor. Inf. Process. Lett. 1987, 24, 377–380. [Google Scholar] [CrossRef]
- Pedregosa, F.; Varoquaux, G.; Gramfort, A.; Michel, V.; Thirion, B.; Grisel, O.; Blondel, M.; Prettenhofer, P.; Weiss, R.; Dubourg, V.; et al. Scikit-learn: Machine Learning in Python. J. Mach. Learn. Res. 2011, 12, 2825–2830. [Google Scholar]
- Belkin, M.; Hsu, D.J.; Mitra, P. Overfitting or perfect fitting? Risk bounds for classification and regression rules that interpolate. In Proceedings of the Advances in Neural Information Processing Systems, Montreal, QC, Canada, 3–8 December 2018; pp. 2300–2311. [Google Scholar]




{kind=link}
{kind=link}
{kind=link}
| Term | Description | Source |
|---|---|---|
| Distance (km) | Distance driven | TEO-Taxi database * |
| Average Speed (km/s) | Average speed | TEO-Taxi database * |
| Gained Altitude | Total gained altitude in meters | NASA elevation map * |
| Lost Altitude | Total lost altitude in meters | NASA elevation map * |
| Duration seconds | Total duration in seconds | TEO-Taxi database |
| Temperature (C) | Outside temperature | Environment Canada public database |
| Wind Speed (km/h) | Speed of wind on the day of the ride | Environment Canada public database |
| Wind Direction | Direction of wind on the day of the ride | Environment Canada public database |
| Starting SOC | Starting SOC of the vehicle | Fleet Carma Data Logger |
| Ending SOC | Ending SOC of the vehicle | Fleet Carma Data Logger |
| Vehicle Id | Unique identifier of the vehicle | TEO-Taxi database |
| Vehicle Model | Model of the vehicle | TEO-Taxi database |
| Date | Date of the ride | TEO-Taxi database |
| Driver Id | Id of the driver of the vehicle | TEO-Taxi database |
| Time since last charge | Time since the last charge of the vehicle | TEO-Taxi database |
| Odometer | Odometer of the vehicle | TEO-Taxi database |
| Precipitation | Amount of precipitation that happened during the day | Environment Canada public database |
| Nominal capacity | Theoretical capacity of the vehicle | TEO-Taxi database |
| Vehicle positions | GPS positions of the vehicle | TEO-Taxi database * |
| Winter | Is equal to 1 when the date is between the 15th of December | TEO-Taxi database |
| and the 15th of March otherwise it is equal to 0. | ||
| Winter tires are mandatory during this period. | ||
| Summer | Is equal to 1 when the date is not between the 15th of December | TEO-Taxi’s database |
| and the 15th of March otherwise it is equal to 0 | ||
| Speed histogram | 21 terms representing the | TEO-Taxi database * |
| distance driven at speed [0...5[ , [5...10[ ... [100...105[ km/h |
| Vehicle Model | 0–5 km | 5–10 km | 10–15 km | 15–20 km | 20–25 km | 25–30 km | 30+ km | Total |
|---|---|---|---|---|---|---|---|---|
| Kia Soul | 118,621 | 12,772 | 426 | 31 | 9 | 3 | 4 | 131,866 |
| Nissan LEAF | 23,687 | 2485 | 92 | 3 | 2 | 0 | 0 | 26,269 |
| Tesla Model S | 9302 | 7363 | 4700 | 676 | 29 | 3 | 9 | 22,082 |
| Tesla Model X | 4858 | 4512 | 3195 | 538 | 19 | 3 | 5 | 13,130 |
| Vehicle Model | 0–5 km | 5–10 km | 10–15 km | 15–20 km | 20–25 km | 25–30 km | 30+ km | Average |
|---|---|---|---|---|---|---|---|---|
| Kia Soul | 0.50 | 1.44 | 2.449 | 3.11 | 5.068 | 4.40 | 7.58 | 3.51 |
| Nissan LEAF | 0.74 | 1.93 | 3.03 | 3.96 | 6.31 | n/a | n/a | 3.194 |
| Tesla Model S | 0.76 | 1.68 | 2.46 | 3.22 | 4.76 | 4.76 | 6.45 | 3.44 |
| Tesla Model X | 0.86 | 1.83 | 2.68 | 3.60 | 4.91 | 6.79 | 6.95 | 3.95 |
| Vehicle Model | 0–5 km | 5–10 km | 10–15 km | 15–20 km | 20–25 km | Average * |
|---|---|---|---|---|---|---|
| Kia Soul | ||||||
| Nissan LEAF | ||||||
| Tesla Model S | ||||||
| Tesla Model X | ||||||
| Weighted Average |
| Vehicle Model | 0–5 km | 5–10 km | 10–15 km | 15–20 km | 20–25 km | Average * |
|---|---|---|---|---|---|---|
| Kia Soul | ||||||
| Nissan LEAF | ||||||
| Tesla Model S | ||||||
| Tesla Model X | ||||||
| Weighted Average |
| Vehicle Model | 0–5 km | 5–10 km | 10–15 km | 15–20 km | 20–25 km | Average * |
|---|---|---|---|---|---|---|
| Kia Soul | ||||||
| Nissan LEAF | ||||||
| Tesla Model S | ||||||
| Tesla Model X | ||||||
| Weighted Average |
| Vehicle Model | 0–5 km | 5–10 km | 10–15 km | 15–20 km | 20–25 km | Average * |
|---|---|---|---|---|---|---|
| Kia Soul | ||||||
| Nissan LEAF | ||||||
| Tesla Model S | ||||||
| Tesla Model X | ||||||
| Weighted Average |
| Vehicle Model | 0–5 km | 5–10 km | 10–15 km | 15–20 km | 20–25 km | Average * |
|---|---|---|---|---|---|---|
| Kia Soul | ||||||
| Nissan LEAF | ||||||
| Tesla Model S | ||||||
| Tesla Model X | ||||||
| Weighted Average |
| Vehicle Model | 0–5 km | 5–10 km | 10–15 km | 15–20 km | 20–25 km | Average * |
|---|---|---|---|---|---|---|
| Kia Soul | ||||||
| Nissan LEAF | ||||||
| Tesla Model S | ||||||
| Tesla Model X | ||||||
| Weighted Average |
| Vehicle Model | 0–5 km | 5–10 km | 10–15 km | 15–20 km | 20–25 km | Average * |
|---|---|---|---|---|---|---|
| Kia Soul | ||||||
| Nissan LEAF | ||||||
| Tesla Model S | ||||||
| Tesla Model X | ||||||
| Weighted Average |
| Vehicle Model | 0–5 km | 5–10 km | 10–15 km | 15–20 km | 20–25 km | Average * |
|---|---|---|---|---|---|---|
| Kia Soul | ||||||
| Nissan LEAF | ||||||
| Tesla Model S | ||||||
| Tesla Model X | ||||||
| Weighted Average |
| Vehicle Model | Basic Physical Model | Extended Physical Model | Fitted Extended Physical Model (Linear Regression) | Learned Empirical Model (No Interaction Terms) | Learned Empirical Model (Interaction Terms) | Hybrid Model (No Interaction Terms) | Hybrid Model (Interaction Terms) |
|---|---|---|---|---|---|---|---|
| Kia Soul | 0.68 | 0.62 | 0.46 | 0.63 | 1.03 | 1.29 | 1.24 |
| Nissan LEAF | 0.85 | 0.66 | 0.63 | 0.58 | 0.57 | 0.58 | 0.53 |
| Tesla Model S | 0.91 | 0.93 | 0.59 | 0.62 | 0.76 | 0.83 | 0.60 |
| Tesla Model X | 0.88 | 0.83 | 0.61 | 0.69 | 0.70 | 1.03 | 0.98 |
| Vehicle Model | Basic Physical Model | Extended Physical Model | Fitted Extended Physical Model (Linear Regression) | Learned Empirical Model (No Interaction Terms) | Learned Empirical Model (Interaction Terms) | Hybrid Model (No Interaction Terms) | Hybrid Model (Interaction Terms) |
|---|---|---|---|---|---|---|---|
| Kia Soul | 0.35 | 0.32 | 0.23 | 0.32 | 0.53 | 0.66 | 0.63 |
| Nissan LEAF | 0.45 | 0.35 | 0.33 | 0.30 | 0.30 | 0.30 | 0.28 |
| Tesla Model S | 0.35 | 0.36 | 0.23 | 0.24 | 0.29 | 0.32 | 0.23 |
| Tesla Model X | 0.30 | 0.28 | 0.20 | 0.23 | 0.23 | 0.35 | 0.33 |
© 2019 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Deschênes, A.; Gaudreault, J.; Rioux-Paradis, K.; Redmont, C. Predicting Electric Vehicle Consumption: A Hybrid Physical-Empirical Model. World Electr. Veh. J. 2020, 11, 2. https://doi.org/10.3390/wevj11010002
Deschênes A, Gaudreault J, Rioux-Paradis K, Redmont C. Predicting Electric Vehicle Consumption: A Hybrid Physical-Empirical Model. World Electric Vehicle Journal. 2020; 11(1):2. https://doi.org/10.3390/wevj11010002
Chicago/Turabian StyleDeschênes, Anthony, Jonathan Gaudreault, Kim Rioux-Paradis, and Chloé Redmont. 2020. "Predicting Electric Vehicle Consumption: A Hybrid Physical-Empirical Model" World Electric Vehicle Journal 11, no. 1: 2. https://doi.org/10.3390/wevj11010002