
A Method for Mapping V2X Communication Requirements to Highly Automated and Autonomous Vehicle Functions



Abstract
:
1. Introduction
2. State-of-the-Art V2X Technology
- Interference and Signal Degradation: In urban environments with high-density traffic, buildings and other obstacles, the radio signals can suffer interference or degradation, leading to signal loss or reduced quality of communication [17].
- Dynamic Network Topology: The network topology in V2X communication is highly dynamic due to the mobility of vehicles and changing environmental conditions. Maintaining reliable communication paths becomes challenging as vehicles move in and out of range or obstruct each other’s signals [18].
- Latency and Delay: The time-sensitive nature of V2X applications, such as collision avoidance systems, requires low latency communication. However, delays in signal transmission or processing can occur due to network congestion, protocol overhead, or computational limitations in onboard systems, compromising reliability [19].
- Scalability: As the number of connected vehicles increases, the scalability of communication systems becomes crucial. Ensuring reliable communication among a large number of vehicles while maintaining network efficiency and avoiding congestion is a significant challenge [20].
- Security and Privacy: V2X communication involves the exchange of sensitive information related to vehicle location, speed and trajectory. Ensuring the security and privacy of these data against malicious attacks, such as spoofing, jamming, or eavesdropping, is essential for maintaining communication reliability and trust among the users [21].
- Harsh Environmental Conditions: V2X communication must operate reliably under various environmental conditions, including adverse weather (e.g., heavy rain, snow), electromagnetic interference and physical obstructions. Adapting communication protocols and signal processing techniques to mitigate the impact of these conditions is necessary for maintaining reliability [22].
- Quality of Service (QoS) Requirements: Different V2X applications may have varying QoS requirements in terms of reliability, latency and bandwidth. Ensuring that the communication system can meet these diverse requirements while optimizing resource utilization and network performance is a complex challenge [23].
2.1. Protocols of V2X Communication
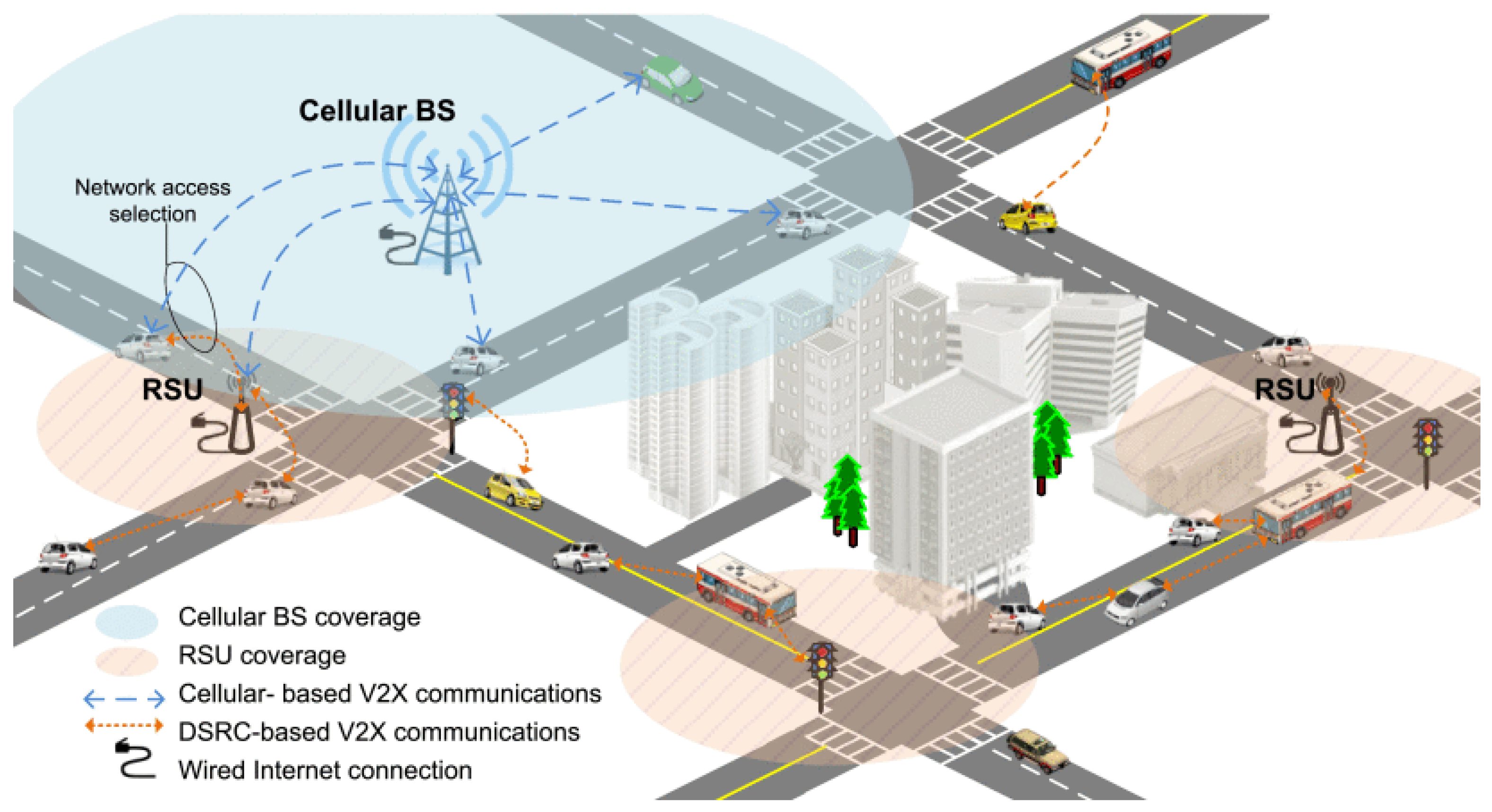
2.1.1. DSRC Protocol
- Vehicle-to-Vehicle (V2V): communication between vehicles. It allows nearby vehicles to exchange safety-critical information, such as speed, location, acceleration and braking status, enabling cooperative maneuvers and collision avoidance.
- Vehicle-to-Infrastructure (V2I): communication between vehicles and infrastructure components like traffic signals, roadside units, and toll booths. It enables the exchange of traffic-related data, such as signal phase and timing information, traffic conditions, and road hazards. V2I communication enhances traffic efficiency and supports applications like signal prioritization for emergency vehicles.
- Vehicle-to-Pedestrian (V2P): communication between vehicles and pedestrians carrying DSRC-enabled devices. This communication mode enhances pedestrian safety by providing alerts to both the driver and the pedestrian in potentially hazardous situations.
- Vehicle-to-Network (V2N): Involves communication between vehicles and the broader communication network, enabling access to cloud-based services, traffic information, and other centralized data sources.
- Vehicle-to-Grid (V2G): Allows electric vehicles to communicate with the power grid, enabling bidirectional flow of energy. This can be utilized for vehicle charging, discharging excess energy back to the grid, and participating in demand response programs.
- Vehicle-to-Cloud (V2C): Involves communication between vehicles and cloud-based platforms, enabling access to a wide range of services, including over-the-air updates, infotainment and personalized settings.
- Vehicle-to-Home (V2H): Enables communication between vehicles and smart home systems, allowing the integration of electric vehicles with home energy management for charging optimization and energy sharing.
- Vehicle-to-Device (V2D): Involves communication between vehicles and other connected devices, such as smartphones or wearables, to enhance the overall connected experience and provide additional services.
2.1.2. C-V2X Protocol
- Direct Communication Mode (PC5): In this mode, vehicles directly communicate with each other and nearby infrastructure using a PC5 interface. PC5 stands for “sidelink” and refers to the direct short-range communication between vehicles and infrastructure components without relying on the cellular network. It operates in the 5.9 GHz frequency band, similar to DSRC, and provides low-latency and high-reliability communication. PC5 allows vehicles to exchange safety-critical messages and information such as location, speed, acceleration and other relevant data. It enables direct V2V, V2I and V2P communications [27].
- Network Communication Mode: In this mode, C-V2X utilizes the cellular network infrastructure to enable wide-area communication and access cloud-based services. Vehicles can connect to the network through the cellular base stations and exchange information with other vehicles, infrastructure and centralized servers. Network communication mode allows for more extensive coverage and provides access to additional services, such as real-time traffic information, over-the-air software updates, and remote diagnostics. It enables vehicle-to-network and vehicle-to-cloud communications, expanding the capabilities of V2X applications [28].
3. Related Work
4. SAE Levels of Autonomy and V2X
SAE Levels of Autonomous Vehicles
- LoA 0: No driving automationThe vehicle does not possess the capability to carry out any automated actions. However, it can still transmit warning signals to the human operator. This limitation underscores the crucial role of human oversight and decision-making in the operation of the vehicle. Despite advancements in automation and vehicle intelligence, the presence of a human operator remains essential to ensure safety and manage complex situations that may arise. By receiving warning signals, the human operator can stay informed about potential hazards or critical events, allowing them to intervene and take appropriate actions as necessary. The integration of warning systems with human–machine interfaces becomes crucial to effectively communicate critical information and enable timely responses for the human operator. Thus, while the vehicle lacks autonomous actuation abilities in these use-cases, it emphasizes the continuous importance of human involvement and situational awareness in ensuring safe and reliable vehicle operation.
- LoA 1: Driver assistanceADAS functionalities are enabled, primarily through automated control of either longitudinal (acceleration and deceleration) or lateral (steering) motions. However, it is important to note that the human operator is responsible for the overall control and operation of the vehicle. While the automated system assists in specific aspects of the driving task, such as maintaining a set speed or keeping the vehicle within its lane, the human operator retains the ultimate responsibility for monitoring the driving environment and making critical decisions.
- LoA 2: Partial driving automationThe vehicle is empowered with the ability to be fully actuated by an autonomous system, enabling coordinated longitudinal and lateral control. The human operator remains actively engaged and responsible for overseeing the driving task. Their continuous involvement is essential to ensure a prompt and seamless transition of control when necessary. Nevertheless, the human operator’s active engagement is pivotal. They must be ready to intervene and resume control of the vehicle immediately if the autonomous system encounters limitations or fails to handle certain driving situations. Effective monitoring of the driving environment, awareness of system capabilities and limitations, and the ability to respond promptly to unexpected scenarios are crucial aspects of the human operator’s role in Level 2 automation.
- LoA 3: Conditional automationThe dynamic driving task is primarily managed by the automated system. The human operator is actively supervising the system’s operation. The automated system possesses advanced capabilities for environment recognition, decision-making, and control, enabling it to handle the entire driving task under specific conditions. One of the critical challenges in LoA 3 automation is the handover of control between the automated system and the human operator. It ensures that the human operator is always sufficiently aware and engaged to take over control is crucial to avoid potential hazards or delays in critical situations. Human–machine interfaces, clear communication, and proper training are paramount to facilitate effective control transitions and maintain the overall safety of the driving experience.
- LoA 4: High automationIt represents a significant advancement in autonomous driving. At this level, the dynamic driving task is jointly performed by the vehicle’s automated system, encompassing control, decision making, and environment recognition tasks. This joint performance is limited to a specific Operational Design Domain (ODD) defined by certain boundaries and conditions. In the event of a system malfunction or encountering tasks that exceed the system’s capabilities, the vehicle is equipped with mechanisms to transit to a safe state. This ensures that the vehicle can mitigate risks and respond appropriately in challenging or unpredictable situations.
- LoA 5: Full automationIt signifies the highest level of autonomous driving capability, where the automated system autonomously manages all dynamic driving tasks across any operational design domain without the need for human intervention. At this level, the vehicle is fully self-driving, equipped with robust decision-making capabilities. It can navigate and adapt to a wide range of driving scenarios, including complex urban environments, highways, and challenging weather conditions.
5. V2X Technology in the Context of SAE Levels of Autonomy
5.1. Mapping of V2X Capabilities to the SAE Levels of Autonomy
- LoA 0—No automation. At Level 0, V2X technology refers to the communication and exchange of information between vehicles and the surrounding infrastructure, including other vehicles, pedestrians, traffic signals and road infrastructure. It enables vehicles to share real-time data such as speed, position and intentions with other connected entities, allowing for enhanced situational awareness [46]. At this level, V2X technology plays a crucial role in providing important safety-related information to the human driver, e.g., warnings about hazardous road conditions, traffic congestion or the presence of emergency vehicles. By transmitting this information, both situational awareness and decision making capabilities are significantly improved.
- LoA 1—Driver assistance. The human driver remains engaged and responsible for the driving task, V2X can augment the existing driver assistance features by enabling real-time communication between the vehicles, the infrastructure, and the other entities. In practice, this includes data on the speed and trajectory of nearby vehicles, enabling the automated system to maintain a safe distance and adapt the speed accordingly. At this level, V2X can support cooperative maneuvers and interactions between vehicles, such as cooperative merging or platooning. By exchanging information about trajectory or acceleration, the system can aid the human drivers to coordinate their movements more efficiently and smoothly.
- LoA 2—Partial driving automation. V2X communication enables cooperative perception and motion control between the vehicles and the surrounding environment. At this level, the automated system assumes control over both longitudinal and lateral motions, where V2X facilitates the exchange of sensor data between the vehicles. By sharing information about their own sensor readings, such as radar, LIDAR or camera data, vehicles can collectively improve their perception of the surrounding environment, enhancing the object detection, the tracking and the situational awareness, allowing the system to engage in more complex driving scenarios. LoA 2+ systems can also benefit from communicating the intentions of maneuvering functions, such as lane changes, overtaking or merging, to nearby vehicles, enabling smoother and more coordinated movements. This cooperative behavior can enhance safety, reduce the risk of collisions and optimize traffic flow.
- LoA 3—Conditional automation. The automated system is responsible for controlling the vehicle and executing the driving task under certain conditions, while the human driver acts as a fallback and is required to intervene when prompted by the system. At this level, vehicle requires data from traffic infrastructure, such as the traffic lights or the road signs, and the other connected entities, including other vehicles and pedestrians, which are traditionally provided by the onboard sensor system. This information can assist the automated system in making informed decisions, adjusting its behavior and enhance the overall situational awareness of the automated system by providing advanced warnings and alerts. V2X communication can support the seamless transition of control between the automated system and the human driver. In case conditions exceed the capabilities of the automated system or require human intervention in the given ODD, V2X technology can facilitate the handover process.
- LoA 4—High automation. The automated system is capable of performing all dynamic driving tasks within a specific ODD without requiring human intervention. V2X technology contributes to this high automation level by facilitating the exchange of critical information between the vehicles and the infrastructure, enabling them to share real-time data about intentions, trajectories and sensor readings. This cooperative data sharing allows vehicles to have a comprehensive understanding of complex traffic scenarios. At this level, V2X technology contributes to safety and efficiency by enabling vehicles to communicate their ODDs and operational constraints. Through V2X, vehicles can broadcast their intended paths and driving behaviors to others, allowing for optimized route planning and avoidance of conflicts. This cooperative coordination can prevent potential collisions, enhance the traffic predictability, and improve the overall system performance. By integrating this information into their decision-making processes, autonomous vehicles can adapt their driving strategies accordingly and navigate safely within their designated ODDs.
- LoA 5—Full automation. V2X technology is expected to be an essential component in achieving Level 5 self-driving, where the vehicles are fully autonomous and capable of performing all dynamic driving tasks across all operational design domains without any human intervention. V2X enables seamless communication and coordination among the vehicles, the infrastructure and the other entities, therefore the autonomous systems are provided with comprehensive understanding of the surrounding environment and the behaviors of the other entities. By leveraging V2X capabilities, the autonomous vehicles can make highly informed decisions, optimize their routes, and navigate safely and efficiently in complex traffic scenarios. Through V2X communication, the vehicles can negotiate right-of-way, engage in cooperative merging and lane changes, and coordinate their speeds to maintain safe and efficient traffic flow. This cooperative interaction is crucial in creating a harmonious and predictable driving environment. V2X communication enhances the overall safety of Level 5 self-driving by providing advanced warnings and alerts. The vehicles can exchange information about potential hazards, road conditions, and unexpected events. This real-time information can be integrated into the decision-making processes of the autonomous vehicles, allowing them to proactively respond to changing situations and avoid potential collisions.
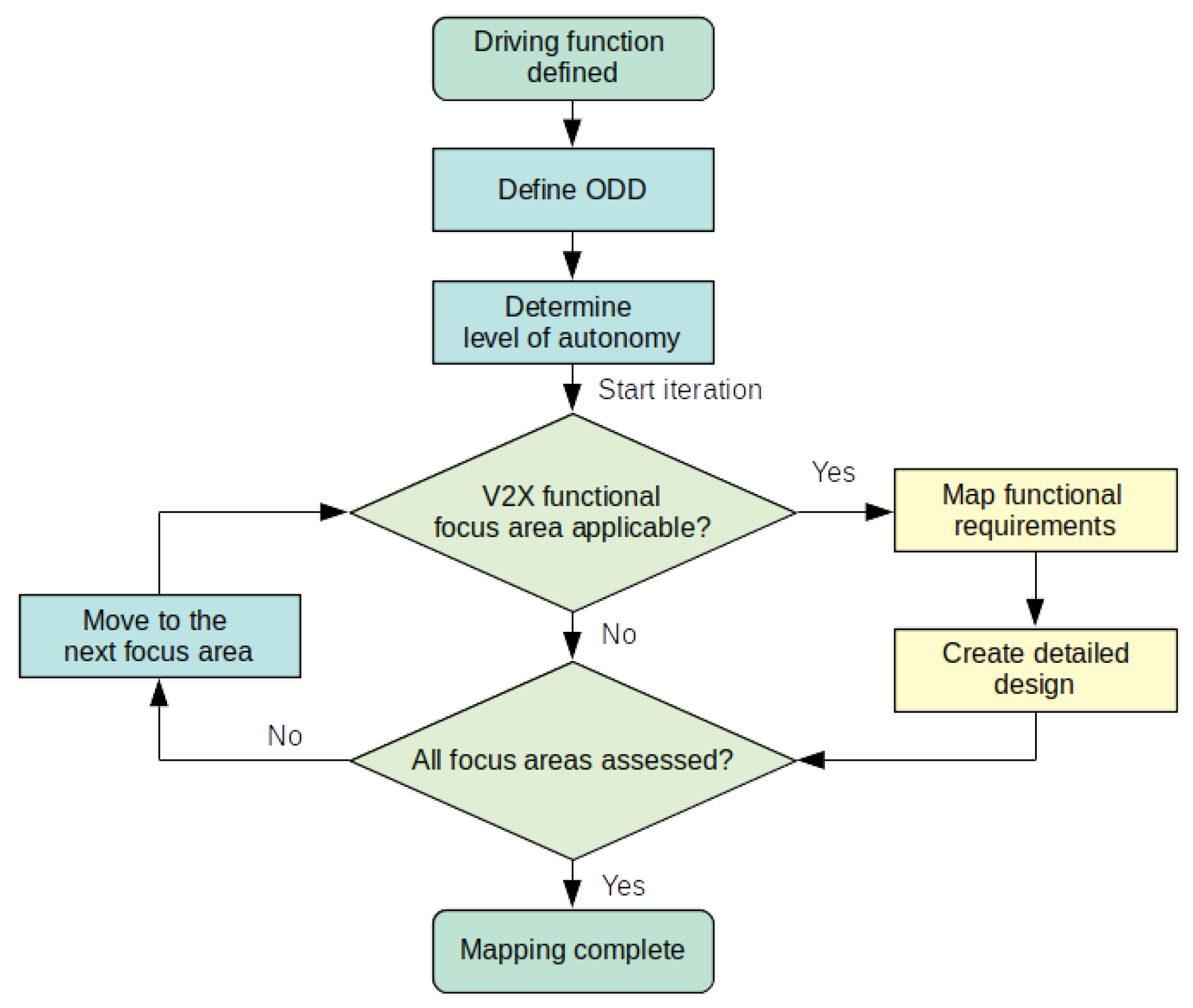
5.2. A Method for Assessing the Applicability of V2X at Various Levels of Automation
- Smart infrastructure—the contribution to the dynamic driving task based on information from the static and dynamic environment;
- Driving strategy—long- and short term trajectory and path planning and navigation;
- Decision making—high-level driving logic behind the automated driving function;
- Collaborative driving—actuation commands and warning signals based on information sharing between the vehicles;
- Driver support—driver assistance in actuation and decision making, provided that control remains in the hands of the driver;
- Driver warning—information sharing about the environment and the status of the vehicle with the purpose of early warning.

{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Level 0 | Level 1 | Level 2 | Level 3 | Level 4 | Level 5 | |
| No Automation | Driver assistance | Partial driving automation | Conditional automation | High automation | Full automation | |
| Smart infrastructure | ✗ | ✗ | ✗ | ✗ | ✓ | ✓ |
| Driving strategy | ✗ | ✗ | ✗ | ★ | ✓ | ✓ |
| Decision making | ✗ | ✗ | ★ | ✓ | ✓ | ✓ |
| Collaborative driving | ✗ | ★ | ✓ | ✓ | ✓ | ✓ |
| Driver support | ✗ | ✓ | ✓ | ✗ | ✗ | ✗ |
| Driver warning | ✓ | ✓ | ✓ | ✓ | ★ | ✗ |
5.3. V2X Aided Use Cases of Automated Driving
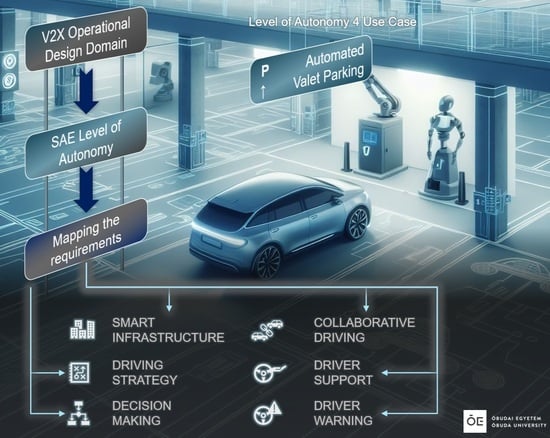
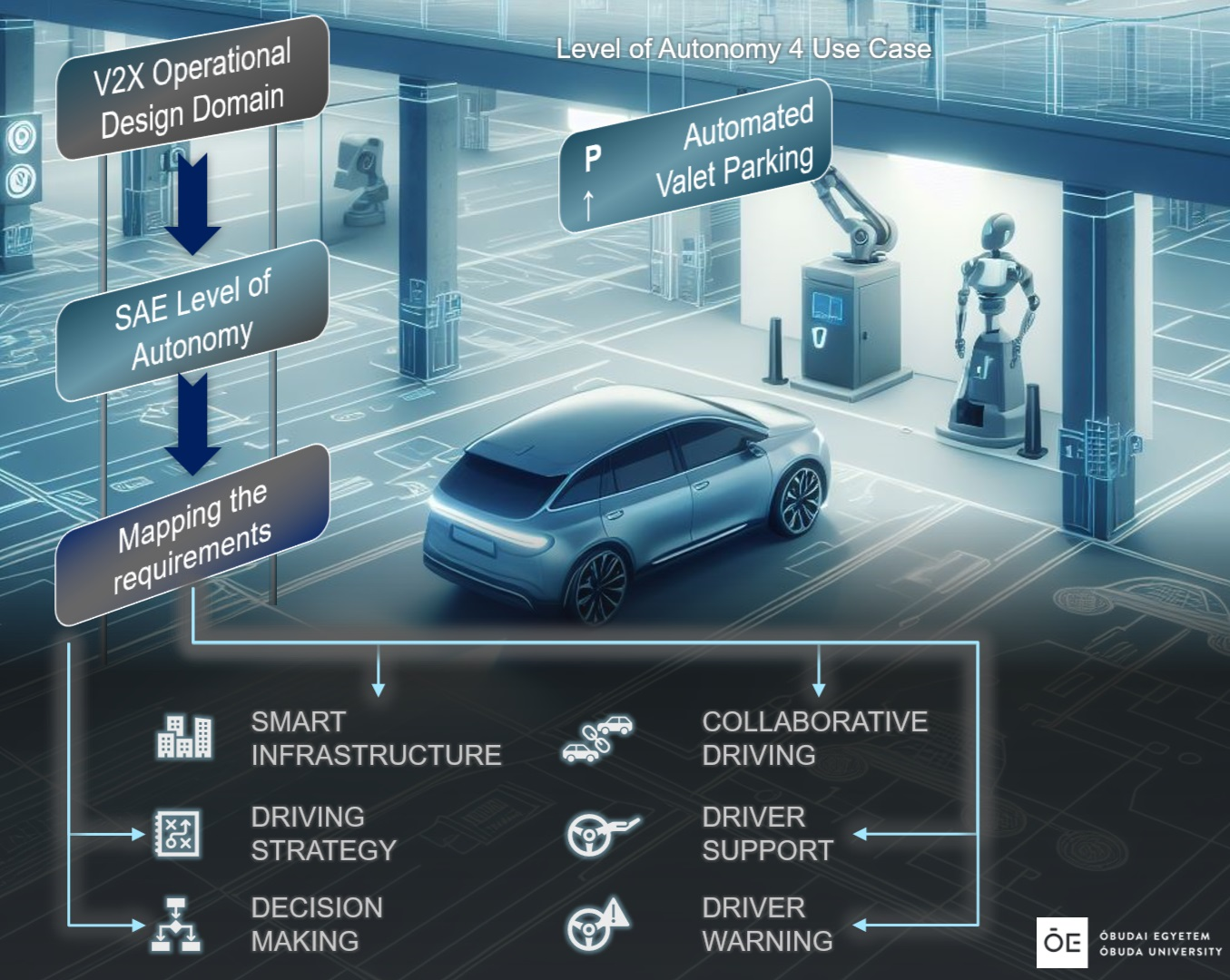
6. Case Study: Application of the Method on LoA 4 Valet Parking with V2X
6.1. Smart Infrastructure—AVP
6.2. Driving Strategy—AVP
6.3. Decision Making—AVP
6.4. Collaborative Driving—AVP
6.5. Driver Support—AVP
6.6. Driver Warning—AVP
7. Sustainability of V2X Technology
8. Outlook to Related Fields
9. Discussion
10. Conclusions
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
Abbreviations
| ABAC | Attribute-Based Access Control |
| ADAS | Advanced Driver Assistance System |
| ASIL | Automotive Safety Integrity Level |
| AVP | Automated Valet Parking |
| CIC | Cooperative Intersection Control |
| DSRC | Dedicated Short-Range Communications |
| E-ACO | Extended Access Control Oriented |
| ESG | Environmental, Social and Corporate Governance |
| EV | Electric Vehicle |
| IEEE | Institute of Electrical and Electronics Engineers |
| IoT | Internet of Things |
| IoV | Internet of Vehicles |
| ITS | Intelligent Transport Systems |
| MPC | Model Predictive Control |
| NHSTA | National Highway Traffic Safety Administration |
| LoA | Level of Autonomy |
| PT | Personal Transporter |
| ODD | Operational Design Domain |
| SAE | Society of Automotive Engineers |
| V2C | Vehicle-to-Cloud |
| V2D | Vehicle-to-Device |
| V2G | Vehicle-to-Grid |
| V2H | Vehicle-to-Home |
| V2I | Vehicle-to-Infrastructure |
| V2N | Vehicle-to-Network |
| V2P | Vehicle-to-Pedestrian |
| V2V | Vehicle-to-Vehicle |
| V2X | Vehicle-to-Everything |
| VRU | Vulnerable Road User |
| VTL | Virtual Traffic Lights |
| VTOL | Vertical Take-off and Landing Vehicle |
References
- Porkolab, L.; Lakatos, I. Preparing of a Simulation System for an Examination of Non-Conventional Seating Positions in the Case of a Self-Driving Car. Acta Polytech. Hung. 2023, 20, 207–226. [Google Scholar] [CrossRef]
- Takacs, A.; Drexler, D.A.; Galambos, P.; Rudas, I.J.; Haidegger, T.; Csizmadia, T. Automotive safety in the development pipeline of highly automated vehicles: Rethinking traditional automotive product-creation methods. IEEE Syst. Man Cybern. Mag. 2020, 6, 35–40. [Google Scholar] [CrossRef]
- Han, J.; Shi, H.; Chen, L.; Li, H.; Wang, X. The car-following model and its applications in the V2X environment: A historical review. Future Internet 2021, 14, 14. [Google Scholar] [CrossRef]
- Arena, F.; Pau, G. An overview of vehicular communications. Future Internet 2019, 11, 27. [Google Scholar] [CrossRef]
- Bazzi, A.; Cecchini, G.; Menarini, M.; Masini, B.M.; Zanella, A. Survey and perspectives of vehicular Wi-Fi versus sidelink cellular-V2X in the 5G era. Future Internet 2019, 11, 122. [Google Scholar] [CrossRef]
- Mohammed, D.; Horváth, B. Vehicle Automation Impact on Traffic Flow and Stability: A Review of Literature. Acta Polytech. Hung. 2023, 20, 129–148. [Google Scholar] [CrossRef]
- Sayeed, A.; Verma, C.; Kumar, N.; Koul, N.; Illés, Z. Approaches and Challenges in Internet of Robotic Things. Future Internet 2022, 14, 265. [Google Scholar] [CrossRef]
- Haidegger, T.; Mai, V.; Mörch, C.; Boesl, D.; Jacobs, A.; Rao R, B.; Khamis, A.; Lach, L.; Vanderborght, B. Robotics: Enabler and inhibitor of the Sustainable Development Goals. Sustain. Prod. Consum. 2023, 43, 422–434. [Google Scholar] [CrossRef]
- Houghtaling, M.A.; Fiorini, S.R.; Fabiano, N.; Gonçalves, P.J.; Ulgen, O.; Haidegger, T.; Carbonera, J.L.; Olszewska, J.I.; Page, B.; Murahwi, Z.; et al. Standardizing an Ontology for Ethically Aligned Robotic and Autonomous Systems. IEEE Trans. Syst. Man Cybern. Syst. 2024, 54, 1791–1804. [Google Scholar] [CrossRef]
- Haidegger, T.; Speidel, S.; Stoyanov, D.; Satava, R. Robot-Assisted Minimally Invasive Surgery—Surgical Robotics in the Data Age. Proc. IEEE 2022, 110, 835–846. [Google Scholar] [CrossRef]
- Wang, J.; Shao, Y.; Ge, Y.; Yu, R. A survey of vehicle to everything (V2X) testing. Sensors 2019, 19, 334. [Google Scholar] [CrossRef]
- ISO26262; Road Vehicles—Functional Safety. ISO: Geneva, Switzerland, 2011.
- Abboud, K.; Omar, H.A.; Zhuang, W. Interworking of DSRC and cellular network technologies for V2X communications: A survey. IEEE Trans. Veh. Technol. 2016, 65, 9457–9470. [Google Scholar] [CrossRef]
- MacHardy, Z.; Khan, A.; Obana, K.; Iwashina, S. V2X access technologies: Regulation, research, and remaining challenges. IEEE Commun. Surv. Tutorials 2018, 20, 1858–1877. [Google Scholar] [CrossRef]
- IEEE 802.11p; IEEE Standard for Information Technology—Telecommunications and Information Exchange between Systems—Local and Metropolitan Area Networks—Specific Requirements—Part 11: Wireless LAN Medium Access Control (MAC) and Physical Layer (PHY) Specifications—Amendment 6: Wireless Access in Vehicular Environments. IEEE: New York, NY, USA, 2010.
- Turley, A.; Moerman, K.; Filippi, A.; Martinez, V. C-ITS: Three observations on LTE-V2X and ETSI ITS-G5—A comparison. NXP Semicond. White Pap. 2018, 1–6. Available online: https://www.nxp.com.cn/docs/en/white-paper/CITSCOMPWP.pdf (accessed on 1 March 2024).
- Huang, J.; Fei, Z.; Wang, T.; Wang, X.; Liu, F.; Zhou, H.; Zhang, J.A.; Wei, G. V2X-communication assisted interference minimization for automotive radars. China Commun. 2019, 16, 100–111. [Google Scholar] [CrossRef]
- Patra, D.; Chavhan, S.; Gupta, D.; Khanna, A.; Rodrigues, J.J. V2X communication based dynamic topology control in VANETs. In Proceedings of the Adjunct 2021 International Conference on Distributed Computing and Networking, Nara, Japan, 5–8 January2021; pp. 62–68. [Google Scholar]
- Lee, K.; Kim, J.; Park, Y.; Wang, H.; Hong, D. Latency of cellular-based V2X: Perspectives on TTI-proportional latency and TTI-independent latency. IEEE Access 2017, 5, 15800–15809. [Google Scholar] [CrossRef]
- Shrestha, R.; Nam, S.Y.; Bajracharya, R.; Kim, S. Evolution of V2X communication and integration of blockchain for security enhancements. Electronics 2020, 9, 1338. [Google Scholar] [CrossRef]
- Yoshizawa, T.; Singelée, D.; Muehlberg, J.T.; Delbruel, S.; Taherkordi, A.; Hughes, D.; Preneel, B. A survey of security and privacy issues in v2x communication systems. ACM Comput. Surv. 2023, 55, 1–36. [Google Scholar] [CrossRef]
- Zhang, Y.; Carballo, A.; Yang, H.; Takeda, K. Perception and sensing for autonomous vehicles under adverse weather conditions: A survey. ISPRS J. Photogramm. Remote Sens. 2023, 196, 146–177. [Google Scholar] [CrossRef]
- Torres-Figueroa, L.; Schepker, H.F.; Jiru, J. QoS evaluation and prediction for C-V2X communication in commercially-deployed LTE and mobile edge networks. In Proceedings of the 2020 IEEE 91st Vehicular Technology Conference (VTC2020-Spring), Antwerp, Belgium, 25–28 May 2020; pp. 1–7. [Google Scholar]
- Kenney, J.B. Dedicated short-range communications (DSRC) standards in the United States. Proc. IEEE 2011, 99, 1162–1182. [Google Scholar] [CrossRef]
- Eichler, S. Performance evaluation of the IEEE 802.11 p WAVE communication standard. In Proceedings of the 2007 IEEE 66th Vehicular Technology Conference, Baltimore, MD, USA, 30 September–3 October 2007; pp. 2199–2203. [Google Scholar]
- Chen, S.; Hu, J.; Zhao, L.; Zhao, R.; Fang, J.; Shi, Y.; Xu, H. Cellular Vehicle-to-Everything (C-V2X); Springer Nature: Berlin/Heidelberg, Germany, 2023. [Google Scholar]
- Bazzi, A.; Berthet, A.O.; Campolo, C.; Masini, B.M.; Molinaro, A.; Zanella, A. On the design of sidelink for cellular V2X: A literature review and outlook for future. IEEE Access 2021, 9, 97953–97980. [Google Scholar] [CrossRef]
- Ji, B.; Zhang, X.; Mumtaz, S.; Han, C.; Li, C.; Wen, H.; Wang, D. Survey on the internet of vehicles: Network architectures and applications. IEEE Commun. Stand. Mag. 2020, 4, 34–41. [Google Scholar] [CrossRef]
- Amaran, M.H.; Noh, N.A.; Rohmad, M.S.; Hashim, H. Interworking of DSRC and Cellular Network Technologies for V2X Communications: A Survey. Procedia Comput. Sci. 2015, 76, 400–405. [Google Scholar] [CrossRef]
- Xu, Y.; Zhou, H.; Chen, J.; Qian, B.; Zhuang, W.; Shen, S.X. V2X empowered non-signalized intersection management in the AI era: Opportunities and solutions. IEEE Commun. Stand. Mag. 2020, 4, 18–25. [Google Scholar] [CrossRef]
- Vorobyev, A.; Pletnev, M.; Koveshnikov, A.; Vorobyeva, T.; Morozov, D.Y. Providing Additional Situational Awareness with the Use of V2X Technology to Improve the Reliability of Highly Automated Vehicles. In Proceedings of the 2021 Systems of Signals Generating and Processing in the Field of on Board Communications, Moscow, Russia, 16–18 March 2021; pp. 1–4. [Google Scholar]
- Kostrzewski, M.; Marczewska, M.; Uden, L. The Internet of Vehicles and Sustainability—Reflections on Environmental, Social, and Corporate Governance. Energies 2023, 16, 3208. [Google Scholar] [CrossRef]
- Stewart, R.R.; Protzel, S.O.; Tindall, P.A. Dedicated Short Range Communications (DSRC) Standards in the United States. Proc. IEEE 2015, 103, 1398–1410. [Google Scholar]
- Alsenwi, M.S.; Al-Wahhab, H.Y. Cellular-V2X: C-V2X Communications for Future Autonomous Vehicles. IEEE Commun. Mag. 2018, 56, 128–134. [Google Scholar]
- Zawodny, M.; Kruszyna, M. Proposals for Using the Advanced Tools of Communication between Autonomous Vehicles and Infrastructure in Selected Cases. Energies 2022, 15, 6579. [Google Scholar] [CrossRef]
- Filali, F.; Maazouz, M.; Ghamri-Doudane, Y. Connected Vehicles: Solutions and Challenges. IEEE Veh. Technol. Mag. 2016, 11, 30–39. [Google Scholar]
- Gupta, M.; Benson, J.; Patwa, F.; Sandhu, R. Secure V2V and V2I communication in intelligent transportation using cloudlets. IEEE Trans. Serv. Comput. 2020, 15, 1912–1925. [Google Scholar] [CrossRef]
- Gupta, M.; Benson, J.; Patwa, F.; Sandhu, R. Dynamic groups and attribute-based access control for next-generation smart cars. In Proceedings of the Ninth ACM Conference on Data and Application Security and Privacy, Richardson, TX, USA, 25–27 March 2019; pp. 61–72. [Google Scholar]
- Gupta, M.; Awaysheh, F.M.; Benson, J.; Alazab, M.; Patwa, F.; Sandhu, R. An attribute-based access control for cloud enabled industrial smart vehicles. IEEE Trans. Ind. Inform. 2020, 17, 4288–4297. [Google Scholar] [CrossRef]
- Gupta, M.; Sandhu, R. Authorization framework for secure cloud assisted connected cars and vehicular internet of things. In Proceedings of the 23nd ACM on Symposium on access Control Models and Technologies, Indianapolis, IN, USA, 13–15 June 2018; pp. 193–204. [Google Scholar]
- National Highway Traffic Safety Administration: Federal Automated Vehicles Policy. Policy 2013, 13–14. Available online: https://www.nhtsa.gov/sites/nhtsa.gov/files/federal_automated_vehicles_policy.pdf (accessed on 1 March 2024).
- Takács, Á.; Drexler, D.A.; Galambos, P.; Rudas, I.J.; Haidegger, T. Assessment and standardization of autonomous vehicles. In Proceedings of the 2018 IEEE 22nd International Conference on Intelligent Engineering Systems (INES), Las Palmas de Gran Canaria, Spain, 21–23 June 2018; pp. 185–192. [Google Scholar]
- Takacs, A.; Haidegger, T. Infrastructural requirements and regulatory challenges of a sustainable urban air mobility ecosystem. Buildings 2022, 12, 747. [Google Scholar] [CrossRef]
- Nagy, T.D.; Haidegger, T. Performance and Capability Assessment in Surgical Subtask Automation. Sensors 2022, 22, 2501. [Google Scholar] [CrossRef]
- Pentek, M.; Zrubka, Z.; Gulacsi, L.; Haidegger, T.; Weszl, M.; Czere, J. 10 pragmatic points to consider when performing a systematic literature review of clinical evidence on digital medical devices. Acta Polytech. Hung. 2023, 20, 110–128. [Google Scholar]
- Drexler, D.A.; Takács, A.; Nagy, T.D.; Haidegger, T. Handover Process of Autonomous Vehicles-technology and application challenges. Acta Polytech. Hung. 2019, 16, 235–255. [Google Scholar] [CrossRef]
- Yang, X.; Shi, Y.; Xing, J.; Liu, Z. Autonomous driving under V2X environment: State-of-the-art survey and challenges. Intell. Transp. Infrastruct. 2022, 1, liac020. [Google Scholar] [CrossRef]
- Schörner, P.; Conzelmann, M.; Fleck, T.; Zofka, M.; Zöllner, J.M. Park my car! automated valet parking with different vehicle automation levels by v2x connected smart infrastructure. In Proceedings of the 2021 IEEE International Intelligent Transportation Systems Conference (ITSC), Indianapolis, IN, USA, 19–22 September 2021; pp. 836–843. [Google Scholar]
- Wang, P.; Di, B.; Zhang, H.; Bian, K.; Song, L. Platoon cooperation in cellular V2X networks for 5G and beyond. IEEE Trans. Wirel. Commun. 2019, 18, 3919–3932. [Google Scholar] [CrossRef]
- Castiglione, L.M.; Falcone, P.; Petrillo, A.; Romano, S.P.; Santini, S. Cooperative intersection crossing over 5G. IEEE/ACM Trans. Netw. 2020, 29, 303–317. [Google Scholar] [CrossRef]
- Zhang, R.; Schmutz, F.; Gerard, K.; Pomini, A.; Basseto, L.; Hassen, S.B.; Ishikawa, A.; Ozgunes, I.; Tonguz, O. Virtual traffic lights: System design and implementation. In Proceedings of the 2018 IEEE 88th Vehicular Technology Conference (Vtc-Fall), Chicago, IL, USA, 27–30 August 2018; pp. 1–5. [Google Scholar]
- Farrag, S.G.; Outay, F.; Yasar, A.U.H.; Janssens, D.; Kochan, B.; Jabeur, N. Toward the improvement of traffic incident management systems using Car2X technologies. Pers. Ubiquitous Comput. 2021, 25, 163–176. [Google Scholar] [CrossRef]
- Schäuffele, J.; Zurawka, T. Automotive Software Engineering; Springer: Berlin/Heidelberg, Germany, 2010. [Google Scholar]
- Han, J.; Wang, X.; Shi, H.; Wang, B.; Wang, G.; Chen, L.; Wang, Q. Research on the Impacts of Vehicle Type on Car-Following Behavior, Fuel Consumption and Exhaust Emission in the V2X Environment. Sustainability 2022, 14, 15231. [Google Scholar] [CrossRef]
- Elma, O.; Cali, U.; Kuzlu, M. An overview of bidirectional electric vehicles charging system as a Vehicle to Anything (V2X) under Cyber–Physical Power System (CPPS). Energy Rep. 2022, 8, 25–32. [Google Scholar] [CrossRef]
- Amaran, M.H.; Noh, N.A.M.; Rohmad, M.S.; Hashim, H. A comparison of lightweight communication protocols in robotic applications. Procedia Comput. Sci. 2015, 76, 400–405. [Google Scholar] [CrossRef]
- Fichtinger, G.; Troccaz, J.; Haidegger, T. Image-Guided Interventional Robotics: Lost in Translation? Proc. IEEE 2022, 110, 932–950. [Google Scholar] [CrossRef]
- Patel, A.R.; Patel, R.S.; Singh, N.M.; Kazi, F.S. Vitality of robotics in healthcare industry: An Internet of Things (IoT) perspective. Internet Things Big Data Technol. Next Gener. Healthc. 2017, 91–109. [Google Scholar] [CrossRef]
- Bathla, G.; Bhadane, K.; Singh, R.K.; Kumar, R.; Aluvalu, R.; Krishnamurthi, R.; Kumar, A.; Thakur, R.; Basheer, S. Autonomous vehicles and intelligent automation: Applications, challenges, and opportunities. Mob. Inf. Syst. 2022, 2022, 7632892. [Google Scholar] [CrossRef]



| Smart Infrastructure | Driving Strategy | Decision Making | Collaborative Driving | Driver Support | Driver Warning |
|---|---|---|---|---|---|
| Static maps | Global path | Swarm intelligence | Shared data | N/A | Optimal status |
| Dynamic data | Local trajectory | Static sensors | - | N/A | Warnings |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Takacs, A.; Haidegger, T. A Method for Mapping V2X Communication Requirements to Highly Automated and Autonomous Vehicle Functions. Future Internet 2024, 16, 108. https://doi.org/10.3390/fi16040108
Takacs A, Haidegger T. A Method for Mapping V2X Communication Requirements to Highly Automated and Autonomous Vehicle Functions. Future Internet. 2024; 16(4):108. https://doi.org/10.3390/fi16040108
Chicago/Turabian StyleTakacs, Arpad, and Tamas Haidegger. 2024. "A Method for Mapping V2X Communication Requirements to Highly Automated and Autonomous Vehicle Functions" Future Internet 16, no. 4: 108. https://doi.org/10.3390/fi16040108