
Anomalous Vehicle Recognition in Smart Urban Traffic Monitoring as an Edge Service †



Abstract
:1. Introduction
- A novel framework is proposed to detect and recognize abnormal vehicle behaviors by leveraging the mSSA algorithm and Capsules Networks at the edge;
- A new cascaded Capsules Network structure is introduced with a new routing agreement for abnormal vehicle behavior recognition; and
- Extensive experimental studies have been conducted with real-world traffic data that validated the effectiveness of SurMon scheme.
2. Related Work
2.1. Anomaly Vehicle Behavior Detection
2.2. Deep Learning with Edge Computing
2.3. Capsules Network
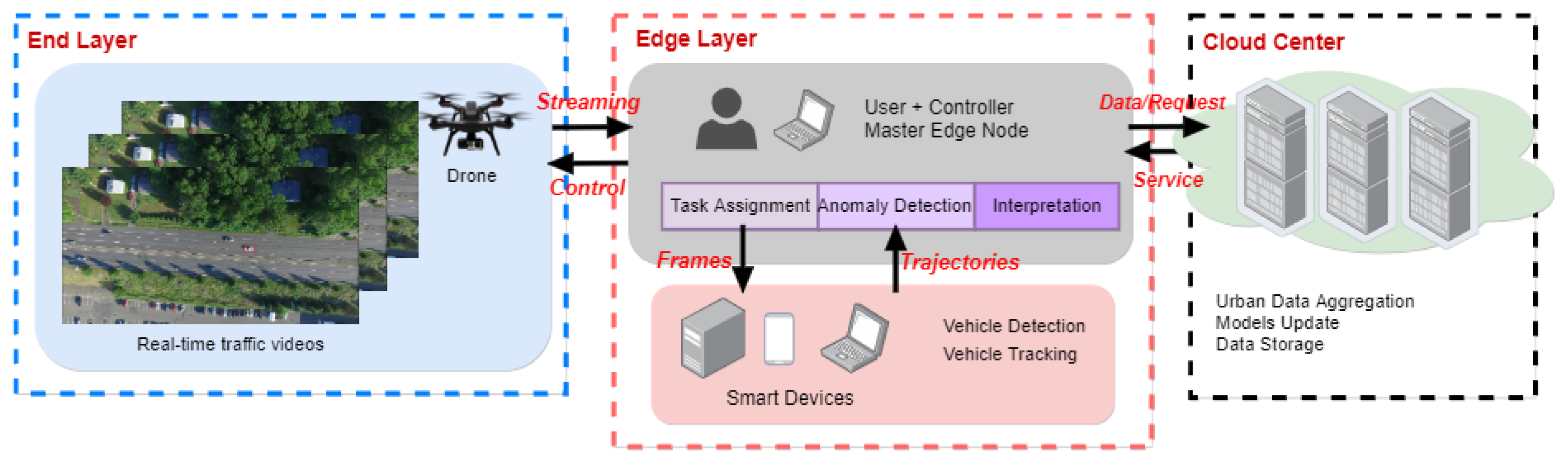
3. SurMon Architecture Overview
4. Anomalous Vehicle Behavior Detection Using mSSA
4.1. A Basic Introduction to SSA
- Embedding: map to a trajectory matrix X. M is the window length and .where M is the dimensions of characteristics and L is the number of observations. Trajectory matrix X is a Hankel matrix of which the elements along the anti-diagonals () are the same: . The embedding procedure is a one-to-one mapping.
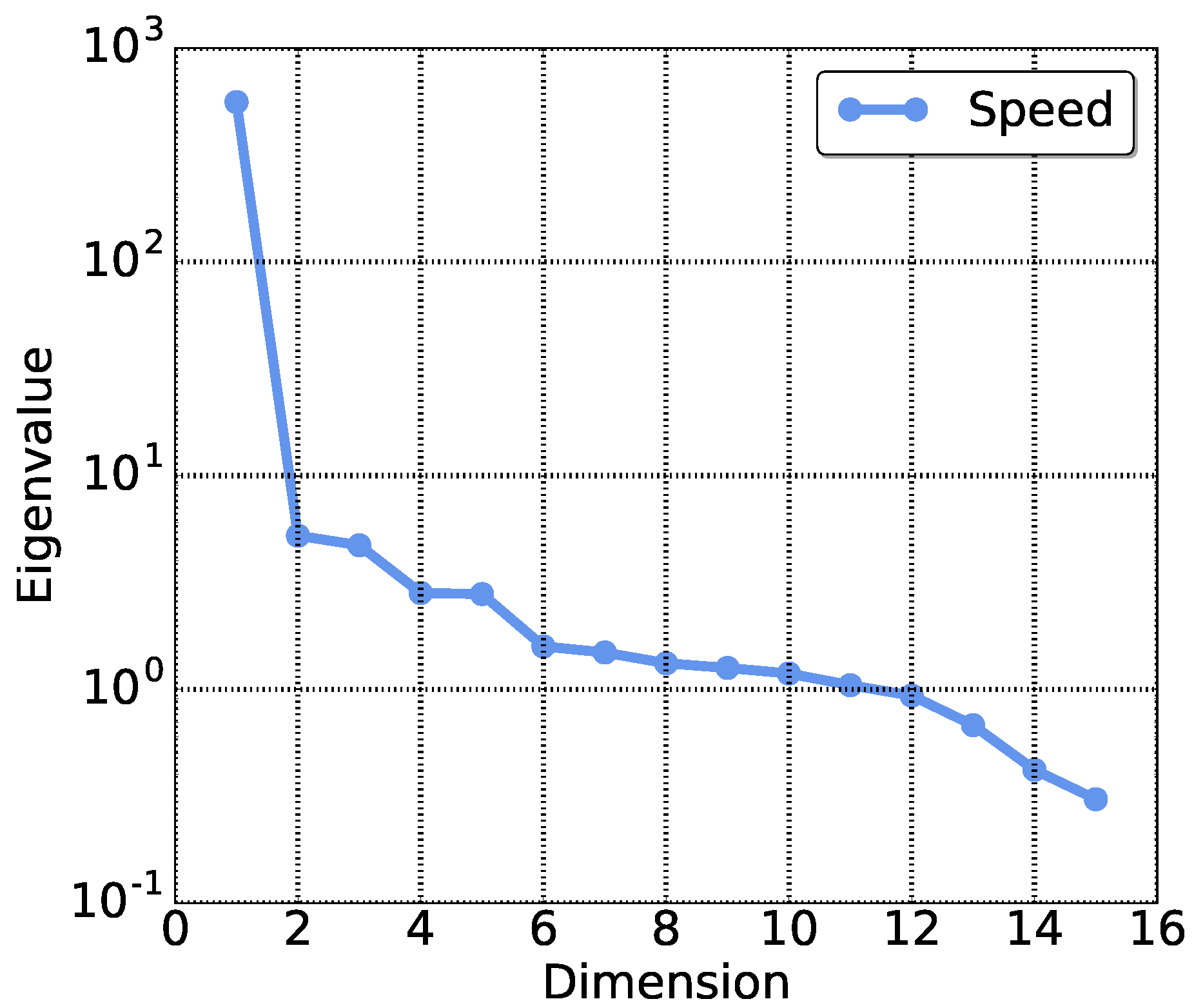
- SVD: the second step is to perform the SVD procedure on the trajectory matrix X. Set covariance matrix , then its eigenvalues are and the corresponding biorthogonal eigenvectors are , where d is the rank of X. Note that eigenvalues are arranged in a decreasing order and larger than 0. (); then, the trajectory matrix X can be written as follows:where is the elementary matrix with rank 1 of the trajectory matrix X, and is one of the eigenvectors of the matrix .
- Grouping: In the third step, elementary matrices are partitioned into disjoint subsets: ; then, the trajectory matrix X can be rewritten as below. Each subset represents one component of the time series, such as trend, oscillation, or noise.
- Diagonal Averaging: in the last step, the reconstruction process maps the matrix with only principal components back to a time series by Hankelizing the matrix with l principal components ().
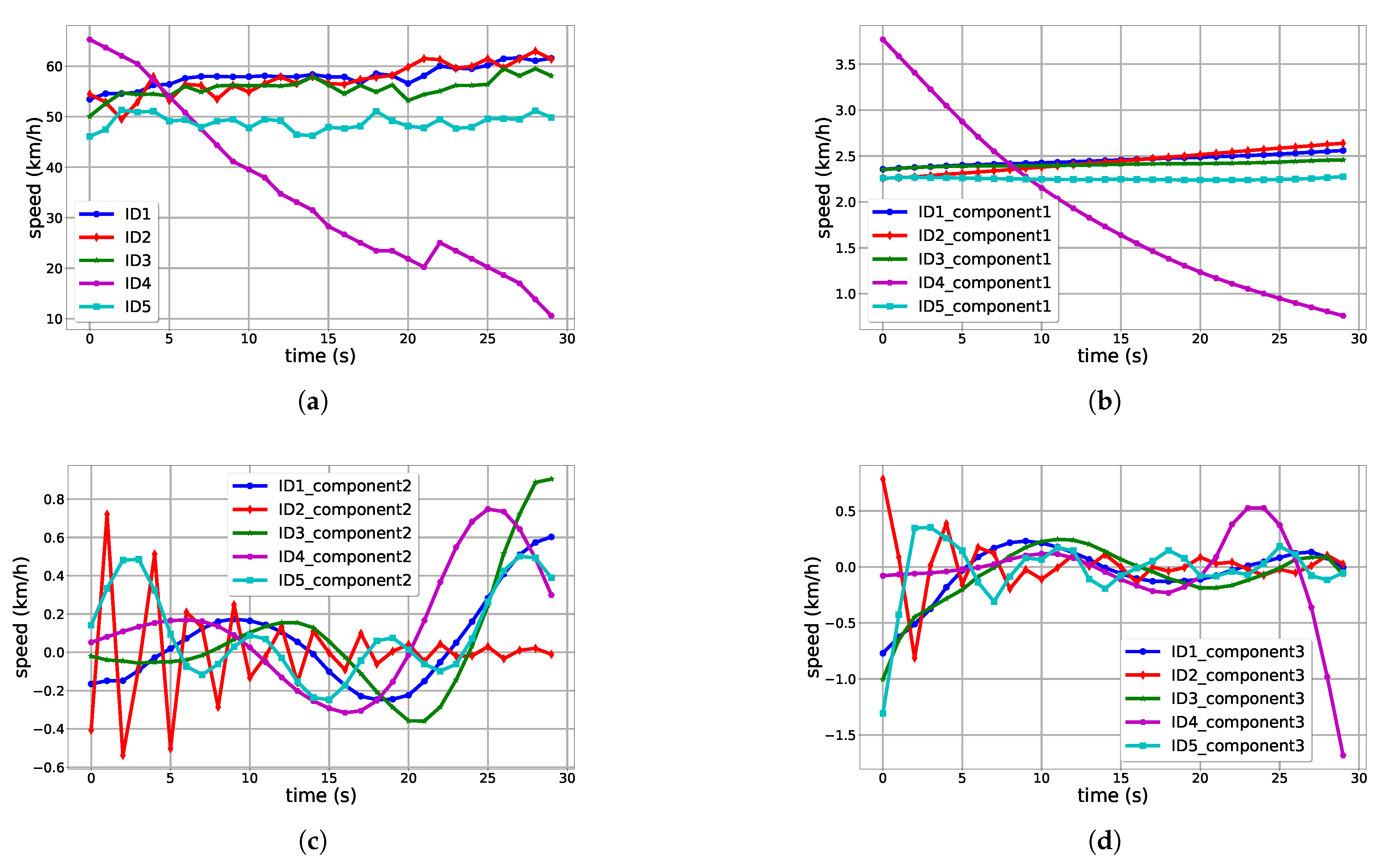
4.2. Multi-Dimensional SSA
4.3. SSA-Based Change Point Detection
4.4. Detection of Anomalously Behaved Vehicles
5. Anomalous Vehicle Behavior Interpretation
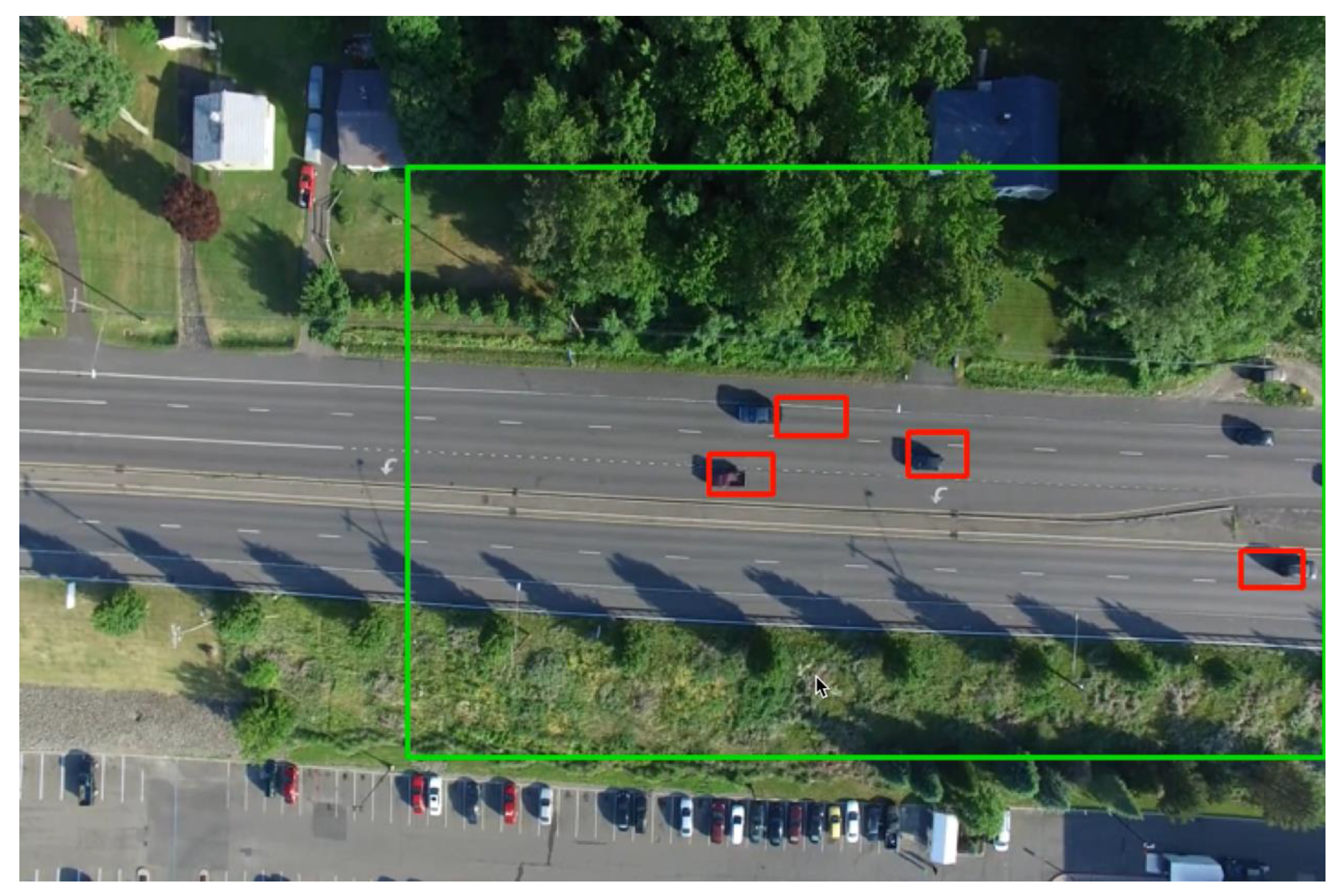
5.1. Vehicle Behavior Data
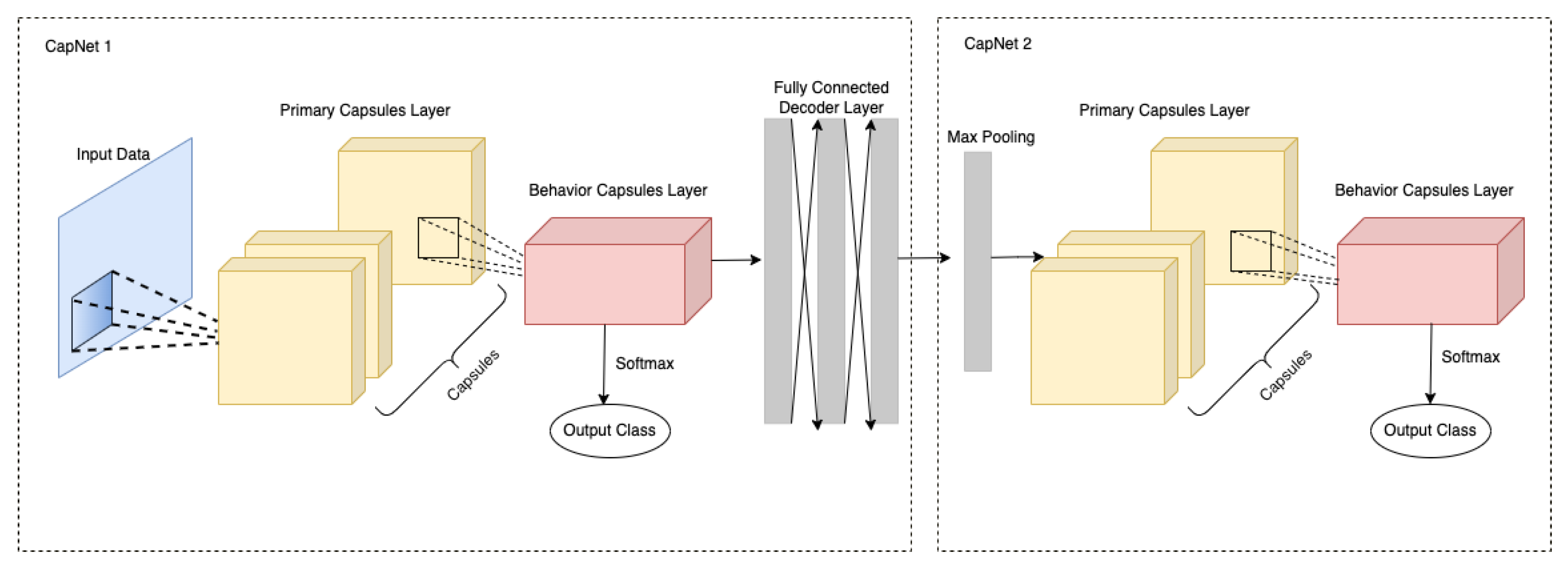
5.2. Cascaded Capsules Network
5.2.1. CapNet 1
| Algorithm 1 Dynamic Routing Algorithm. |
|
5.2.2. CapNet 2
6. Experimental Results
6.1. Experimental Setup
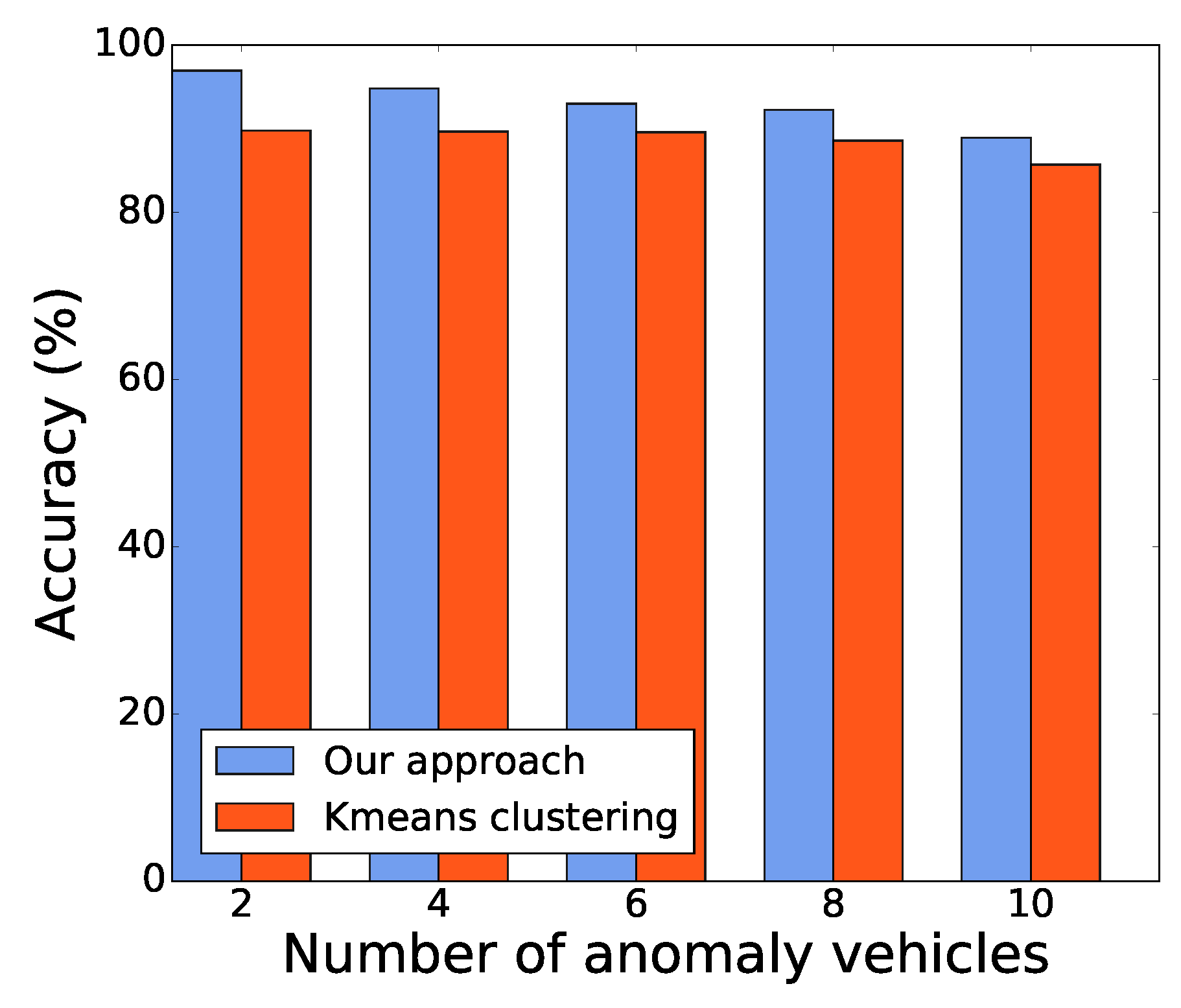
6.2. mSSA-Based Anomalous Behavior Detection
6.2.1. Results with Local Traffic Data
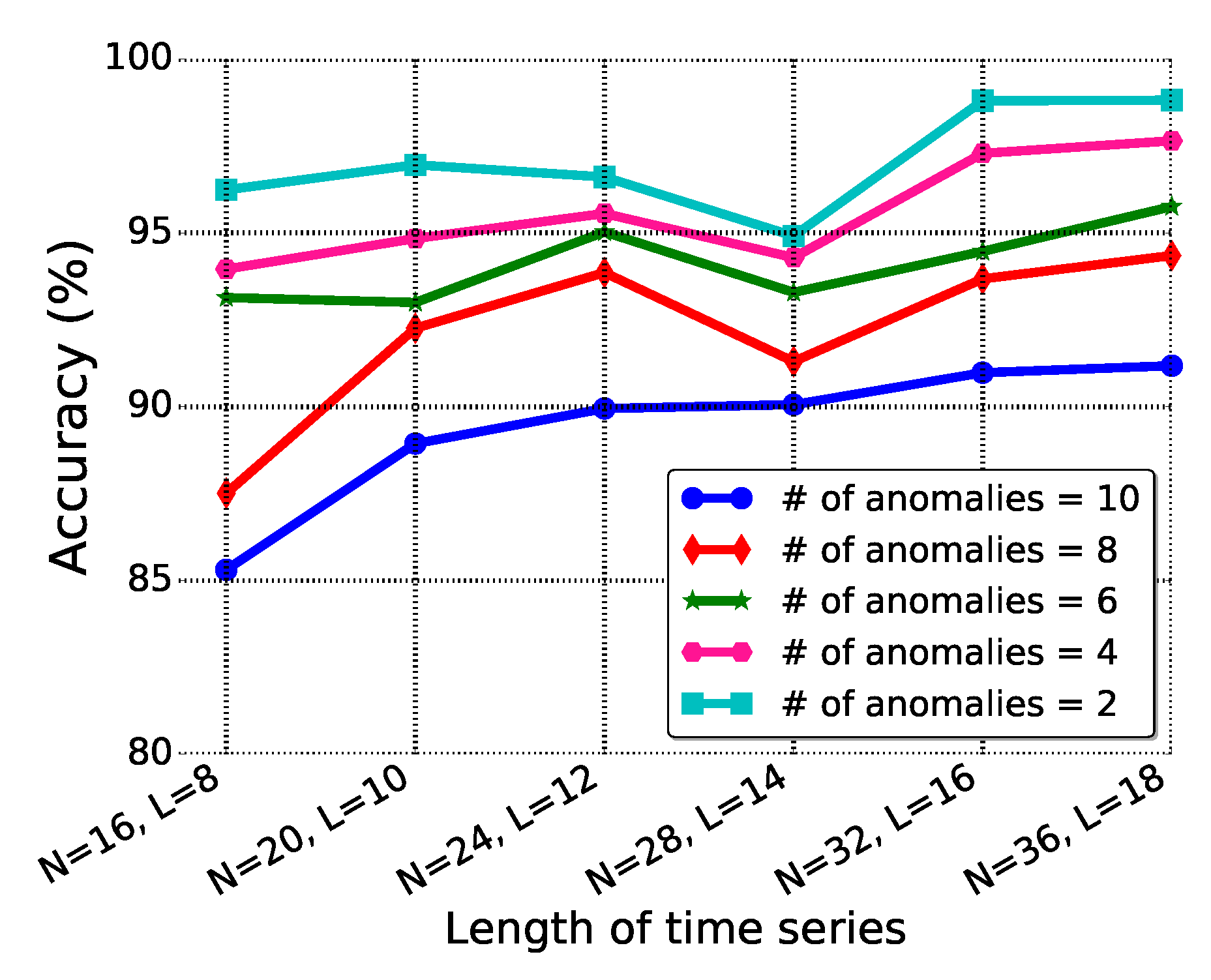
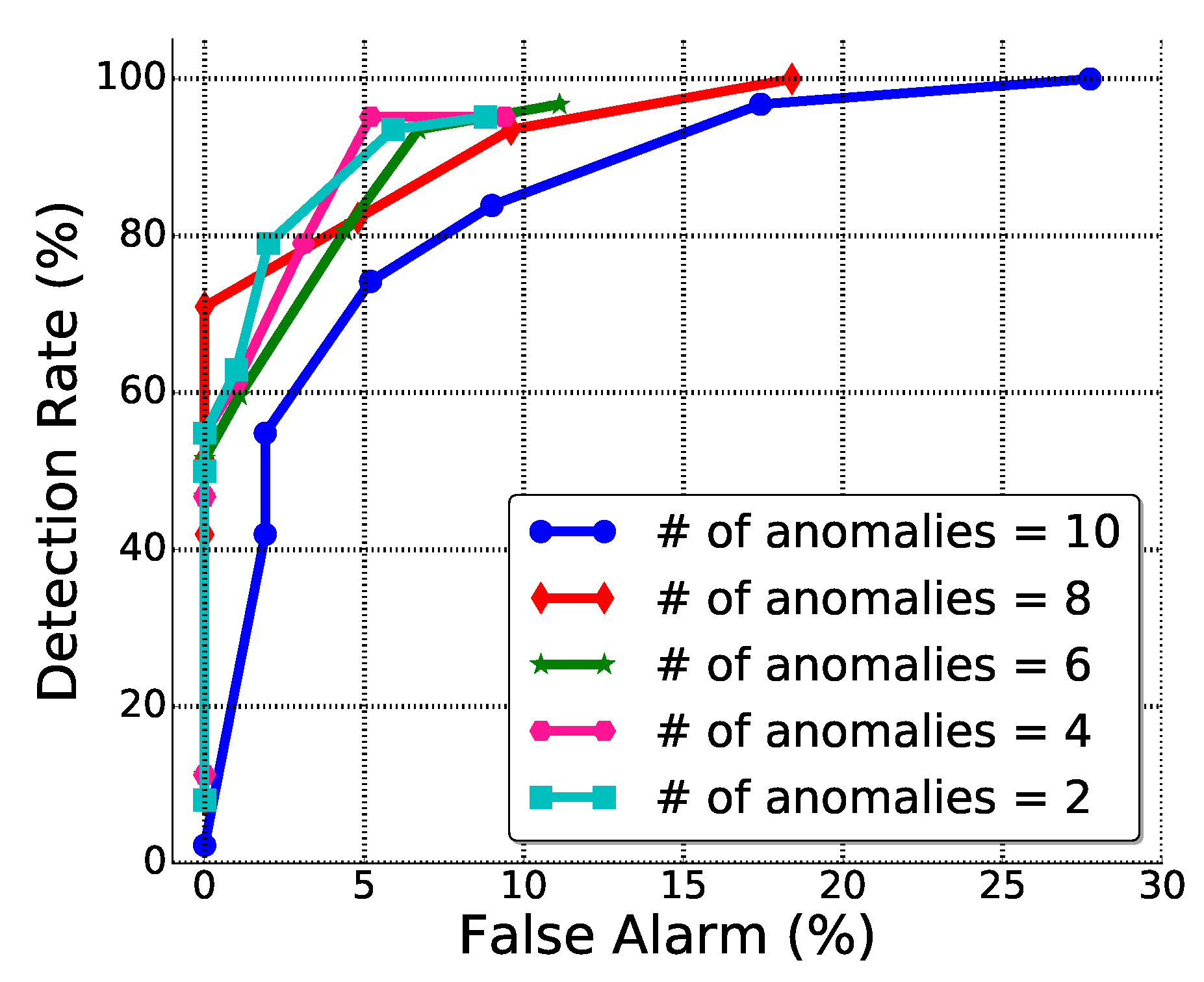
6.2.2. Tests on the Public NGSIM Data Set
6.3. CapNet-Based Anomalous Behavior Interpretation
7. Conclusions
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
Abbreviations
| AI | Artificial Intelligence |
| CNN | Convolutional Neural Network |
| DNN | Deep Neural Network |
| ICT | Information and Communication Technologies |
| IoT | Internet of Things |
| ITS | Intelligent Transportation Systems |
| ML | Machine Learning |
| mSSA | multidimensional Singular Spectrum Analysis |
| NLSTM | Nested Long Short Term Memory |
| NGSIM | Next Generation Simulation |
| SAW | Situational Awareness |
| SDG | Sustainable Development Goals |
| SVD | Singular Value Decomposition |
| UN DESA | United Nations Department of Economic and Social Affairs |
References
- UN. World Urbanization Prospects 2014. 2014. Available online: http://www.un.org/en/development/desa/news/population/world-urbanization-prospects-2014.html (accessed on 9 September 2016).
- Yannuzzi, M.; van Lingen, F.; Jain, A.; Parellada, O.L.; Flores, M.M.; Carrera, D.; Pérez, J.L.; Montero, D.; Chacin, P.; Corsaro, A.; et al. A new era for cities with fog computing. IEEE Internet Comput. 2017, 21, 54–67. [Google Scholar] [CrossRef]
- Ullah, F.; Qayyum, S.; Thaheem, M.J.; Al-Turjman, F.; Sepasgozar, S.M. Risk management in sustainable smart cities governance: A TOE framework. Technol. Forecast. Soc. Chang. 2021, 167, 120743. [Google Scholar] [CrossRef]
- Qian, Y.; Wu, D.; Bao, W.; Lorenz, P. The internet of things for smart cities: Technologies and applications. IEEE Netw. 2019, 33, 4–5. [Google Scholar] [CrossRef]
- Zhu, Q. Research on road traffic situation awareness system based on image big data. IEEE Intell. Syst. 2019, 35, 18–26. [Google Scholar] [CrossRef]
- Shahidehpour, M.; Li, Z.; Ganji, M. Smart cities for a sustainable urbanization: Illuminating the need for establishing smart urban infrastructures. IEEE Electrif. Mag. 2018, 6, 16–33. [Google Scholar] [CrossRef]
- Visvizi, A.; Lytras, M.D. Sustainable Smart Cities and Smart Villages Research: Rethinking Security, Safety, Well-Being, and Happiness. Sustainability 2020, 12, 215. [Google Scholar] [CrossRef] [Green Version]
- Chackravarthy, S.; Schmitt, S.; Yang, L. Intelligent crime anomaly detection in smart cities using deep learning. In Proceedings of the 2018 IEEE 4th International Conference on Collaboration and Internet Computing (CIC), Philadelphia, PA, USA, 18–20 October 2018; IEEE: Piscataway, NJ, USA, 2018; pp. 399–404. [Google Scholar]
- Unions, U. World Health Organization: Road Traffic Deaths. Available online: https://sdgs.un.org/goals/goal11 (accessed on 25 October 2021).
- Cao, K.; Liu, Y.; Meng, G.; Sun, Q. An overview on edge computing research. IEEE Access 2020, 8, 85714–85728. [Google Scholar] [CrossRef]
- Kuang, L.; Gong, T.; OuYang, S.; Gao, H.; Deng, S. Offloading decision methods for multiple users with structured tasks in edge computing for smart cities. Future Gener. Comput. Syst. 2020, 105, 717–729. [Google Scholar] [CrossRef]
- Chen, N.; Chen, Y. Smart city surveillance at the network edge in the era of iot: Opportunities and challenges. In Smart Cities; Springer: Berlin/Heidelberg, Germany, 2018; pp. 153–176. [Google Scholar] [CrossRef]
- Ghosh, A.M.; Grolinger, K. Edge-cloud computing for Internet of Things data analytics: Embedding intelligence in the edge with deep learning. IEEE Trans. Ind. Inform. 2020, 17, 2191–2200. [Google Scholar]
- Shi, W.; Cao, J.; Zhang, Q.; Li, Y.; Xu, L. Edge computing: Vision and challenges. IEEE Internet Things J. 2016, 3, 637–646. [Google Scholar] [CrossRef]
- Xu, R.; Nikouei, S.Y.; Chen, Y.; Polunchenko, A.; Song, S.; Deng, C.; Faughnan, T.R. Real-time human objects tracking for smart surveillance at the edge. In Proceedings of the 2018 IEEE International Conference on Communications (ICC), Kansas City, MO, USA, 20–24 May 2018; IEEE: Piscataway, NJ, USA, 2018; pp. 1–6. [Google Scholar]
- Yun, K.; Huyen, A.; Lu, T. Deep neural networks for pattern recognition. arXiv 2018, arXiv:1809.09645. [Google Scholar]
- Wang, X.; Han, Y.; Leung, V.C.; Niyato, D.; Yan, X.; Chen, X. Convergence of edge computing and deep learning: A comprehensive survey. IEEE Commun. Surv. Tutor. 2020, 22, 869–904. [Google Scholar] [CrossRef] [Green Version]
- Zhao, Z.; Barijough, K.M.; Gerstlauer, A. Deepthings: Distributed adaptive deep learning inference on resource-constrained iot edge clusters. IEEE Trans. Comput. Aided Des. Integr. Circuits Syst. 2018, 37, 2348–2359. [Google Scholar] [CrossRef]
- Teerapittayanon, S.; McDanel, B.; Kung, H.T. Distributed deep neural networks over the cloud, the edge and end devices. In Proceedings of the 2017 IEEE 37th International Conference on Distributed Computing Systems (ICDCS), Atlanta, GA, USA, 5–8 June 2017; IEEE: Piscataway, NJ, USA, 2017; pp. 328–339. [Google Scholar]
- Sabour, S.; Frosst, N.; Hinton, G.E. Dynamic routing between capsules. arXiv 2017, arXiv:1710.09829. [Google Scholar]
- Punjabi, A.; Schmid, J.; Katsaggelos, A.K. Examining the benefits of capsule neural networks. arXiv 2020, arXiv:2001.10964. [Google Scholar]
- Chen, N.; Yang, Z.; Chen, Y.; Polunchenko, A. Online anomalous vehicle detection at the edge using multidimensional SSA. In Proceedings of the 2017 IEEE Conference on Computer Communications Workshops (INFOCOM WKSHPS), Atlanta, GA, USA, 1–4 May 2017; IEEE: Piscataway, NJ, USA, 2017; pp. 851–856. [Google Scholar]
- Department of Transportation ITS Joint Program Office. New Data Sets from the Next Generation Simulation (NGSIM) Program are Now Available in the Research Data Exchange (RDE). Available online: http://www.its.dot.gov/press/2016/datasets_ngsim.htm (accessed on 22 December 2021).
- Dong, Q.; Yang, Z.; Chen, Y.; Li, X.; Zeng, K. Exploration of singular spectrum analysis for online anomaly detection in crns. EAI Endorsed Trans. Secur. Saf. 2017, 4, e3. [Google Scholar] [CrossRef] [Green Version]
- Cai, Y.; Wang, H.; Chen, X.; Jiang, H. Trajectory-based anomalous behaviour detection for intelligent traffic surveillance. IET Intell. Transp. Syst. 2015, 9, 810–816. [Google Scholar] [CrossRef]
- Wu, C.E.; Yang, W.Y.; Ting, H.C.; Wang, J.S. Traffic pattern modeling, trajectory classification and vehicle tracking within urban intersections. In Proceedings of the 2017 International Smart Cities Conference (ISC2), Wuxi, China, 14–17 September 2017; IEEE: Piscataway, NJ, USA, 2017; pp. 1–6. [Google Scholar]
- Santhosh, K.K.; Dogra, D.P.; Roy, P.P. Anomaly detection in road traffic using visual surveillance: A survey. ACM Comput. Surv. (CSUR) 2020, 53, 1–26. [Google Scholar] [CrossRef]
- Ucar, S.; Patnayak, C.; Oza, P.; Hoh, B.; Oguchi, K. Management of Anomalous Driving Behavior. In Proceedings of the 2019 IEEE Vehicular Networking Conference (VNC), Los Angeles, CA, USA, 4–9 December 2019; IEEE: Piscataway, NJ, USA, 2019; pp. 1–4. [Google Scholar]
- Lefkopoulos, V.; Menner, M.; Domahidi, A.; Zeilinger, M.N. Interaction-aware motion prediction for autonomous driving: A multiple model kalman filtering scheme. IEEE Robot. Autom. Lett. 2020, 6, 80–87. [Google Scholar] [CrossRef]
- Mozaffari, S.; Al-Jarrah, O.Y.; Dianati, M.; Jennings, P.; Mouzakitis, A. Deep learning-based vehicle behavior prediction for autonomous driving applications: A review. IEEE Trans. Intell. Transp. Syst. 2020, 23, 33–47. [Google Scholar] [CrossRef]
- Hu, J.; Zhang, X.; Maybank, S. Abnormal driving detection with normalized driving behavior data: A deep learning approach. IEEE Trans. Veh. Technol. 2020, 69, 6943–6951. [Google Scholar] [CrossRef]
- Xun, Y.; Qin, J.; Liu, J. Deep Learning Enhanced Driving Behavior Evaluation Based on Vehicle-Edge-Cloud Architecture. IEEE Trans. Veh. Technol. 2021, 70, 6172–6177. [Google Scholar] [CrossRef]
- Wang, J.; Wang, M.; Liu, Q.; Yin, G.; Zhang, Y. Deep anomaly detection in expressway based on edge computing and deep learning. J. Ambient. Intell. Humaniz. Comput. 2020, 1–13. [Google Scholar] [CrossRef]
- Jiang, L.; Xie, W.; Zhang, D.; Gu, T. Smart diagnosis: Deep learning boosted driver inattention detection and abnormal driving prediction. IEEE Internet Things J. 2021, 1–14. [Google Scholar] [CrossRef]
- Chen, J.; Ran, X. Deep Learning With Edge Computing: A Review. Proc. IEEE 2019, 107, 1655–1674. [Google Scholar] [CrossRef]
- Li, H.; Ota, K.; Dong, M. Learning IoT in edge: Deep learning for the Internet of Things with edge computing. IEEE Netw. 2018, 32, 96–101. [Google Scholar] [CrossRef] [Green Version]
- Qi, X.; Liu, C. Enabling deep learning on iot edge: Approaches and evaluation. In Proceedings of the 2018 IEEE/ACM Symposium on Edge Computing (SEC), Seattle, WA, USA, 25–27 October 2018; IEEE: Piscataway, NJ, USA, 2018; pp. 367–372. [Google Scholar]
- Liu, W.; Anguelov, D.; Erhan, D.; Szegedy, C.; Reed, S.; Fu, C.Y.; Berg, A.C. Ssd: Single shot multibox detector. In European Conference on Computer Vision; Springer: Berlin/Heidelberg, Germany, 2016; pp. 21–37. [Google Scholar]
- Redmon, J.; Farhadi, A. Yolov3: An incremental improvement. arXiv 2018, arXiv:1804.02767. [Google Scholar]
- Howard, A.G.; Zhu, M.; Chen, B.; Kalenichenko, D.; Wang, W.; Weyand, T.; Andreetto, M.; Adam, H. Mobilenets: Efficient convolutional neural networks for mobile vision applications. arXiv 2017, arXiv:1704.04861. [Google Scholar]
- Liang, T.; Glossner, J.; Wang, L.; Shi, S.; Zhang, X. Pruning and quantization for deep neural network acceleration: A survey. Neurocomputing 2021, 461, 370–403. [Google Scholar] [CrossRef]
- Liu, S.; Lin, Y.; Zhou, Z.; Nan, K.; Liu, H.; Du, J. On-demand deep model compression for mobile devices: A usage-driven model selection framework. In Proceedings of the 16th Annual International Conference on Mobile Systems, Applications, and Services, Munich, Germany, 10–15 June 2018; pp. 389–400. [Google Scholar]
- Yao, S.; Zhao, Y.; Zhang, A.; Su, L.; Abdelzaher, T. Deepiot: Compressing deep neural network structures for sensing systems with a compressor-critic framework. In Proceedings of the 15th ACM Conference on Embedded Network Sensor Systems, Delft, The Netherlands, 6–8 November 2017; pp. 1–14. [Google Scholar]
- Reuther, A.; Michaleas, P.; Jones, M.; Gadepally, V.; Samsi, S.; Kepner, J. AI Accelerator Survey and Trends. In Proceedings of the 2021 IEEE High Performance Extreme Computing Conference (HPEC), Waltham, MA, USA, 21–23 September 2021; IEEE: Piscataway, NJ, USA, 2021; pp. 1–9. [Google Scholar]
- Machupalli, R.; Hossain, M.; Mandal, M. Review of ASIC Accelerators for Deep Neural Network. Microprocess. Microsyst. 2022, 89, 104441. [Google Scholar] [CrossRef]
- Shawahna, A.; Sait, S.M.; El-Maleh, A. FPGA-based accelerators of deep learning networks for learning and classification: A review. IEEE Access 2018, 7, 7823–7859. [Google Scholar] [CrossRef]
- Guo, H.; Liu, J.; Lv, J. Toward intelligent task offloading at the edge. IEEE Netw. 2019, 34, 128–134. [Google Scholar] [CrossRef]
- Yu, S.; Chen, X.; Yang, L.; Wu, D.; Bennis, M.; Zhang, J. Intelligent edge: Leveraging deep imitation learning for mobile edge computation offloading. IEEE Wirel. Commun. 2020, 27, 92–99. [Google Scholar] [CrossRef]
- Zamzam, M.; Elshabrawy, T.; Ashour, M. Resource management using machine learning in mobile edge computing: A survey. In Proceedings of the 2019 Ninth International Conference on Intelligent Computing and Information Systems (ICICIS), Cairo, Egypt, 8–12 December 2019; IEEE: Piscataway, NJ, USA, 2019; pp. 112–117. [Google Scholar]
- Jiang, J.; Ananthanarayanan, G.; Bodik, P.; Sen, S.; Stoica, I. Chameleon: Scalable adaptation of video analytics. In Proceedings of the 2018 Conference of the ACM Special Interest Group on Data Communication, Budapest, Hungary, 20–25 August 2018; pp. 253–266. [Google Scholar]
- Park, J.; Samarakoon, S.; Elgabli, A.; Kim, J.; Bennis, M.; Kim, S.L.; Debbah, M. Communication-efficient and distributed learning over wireless networks: Principles and applications. Proc. IEEE 2021, 109, 796–819. [Google Scholar] [CrossRef]
- Kang, Y.; Hauswald, J.; Gao, C.; Rovinski, A.; Mudge, T.; Mars, J.; Tang, L. Neurosurgeon: Collaborative intelligence between the cloud and mobile edge. ACM SIGARCH Comput. Archit. News 2017, 45, 615–629. [Google Scholar] [CrossRef] [Green Version]
- Ran, X.; Chen, H.; Zhu, X.; Liu, Z.; Chen, J. Deepdecision: A mobile deep learning framework for edge video analytics. In Proceedings of the IEEE INFOCOM 2018-IEEE Conference on Computer Communications, Honolulu, HI, USA, 15–19 April 2018; IEEE: Piscataway, NJ, USA, 2018; pp. 1421–1429. [Google Scholar]
- Raza, A.; Huo, H.; Sirajuddin, S.; Fang, T. Diverse capsules network combining multiconvolutional layers for remote sensing image scene classification. IEEE J. Sel. Top. Appl. Earth Obs. Remote Sens. 2020, 13, 5297–5313. [Google Scholar] [CrossRef]
- Afshar, P.; Mohammadi, A.; Plataniotis, K.N. Brain tumor type classification via capsule networks. In Proceedings of the 2018 25th IEEE International Conference on Image Processing (ICIP), Athens, Greece, 7–10 October 2018; IEEE: Piscataway, NJ, USA, 2018; pp. 3129–3133. [Google Scholar]
- Guo, Y.; Pan, Z.; Wang, M.; Wang, J.; Yang, W. Learning capsules for SAR target recognition. IEEE J. Sel. Top. Appl. Earth Obs. Remote Sens. 2020, 13, 4663–4673. [Google Scholar] [CrossRef]
- Chen, R.; Jalal, M.A.; Mihaylova, L.; Moore, R.K. Learning capsules for vehicle logo recognition. In Proceedings of the 2018 21st International Conference on Information Fusion (FUSION), Cambridge, UK, 10–13 July 2018; IEEE: Piscataway, NJ, USA, 2018; pp. 565–572. [Google Scholar]
- LaLonde, R.; Xu, Z.; Irmakci, I.; Jain, S.; Bagci, U. Capsules for biomedical image segmentation. Med. Image Anal. 2021, 68, 101889. [Google Scholar] [CrossRef]
- LaLonde, R.; Bagci, U. Capsules for object segmentation. arXiv 2018, arXiv:1804.04241. [Google Scholar]
- Weld, H.; Huang, X.; Long, S.; Poon, J.; Han, S.C. A survey of joint intent detection and slot-filling models in natural language understanding. arXiv 2021, arXiv:2101.08091. [Google Scholar]
- Staliūnaitė, I.; Iacobacci, I. Auxiliary Capsules for Natural Language Understanding. In Proceedings of the ICASSP 2020-2020 IEEE International Conference on Acoustics, Speech and Signal Processing (ICASSP), Barcelona, Spain, 4–8 May 2020; IEEE: Piscataway, NJ, USA, 2020; pp. 8154–8158. [Google Scholar]
- Tsangouri, E.; Lelon, J.; Minnebo, P.; Asaue, H.; Shiotani, T.; Van Tittelboom, K.; De Belie, N.; Aggelis, D.G.; Van Hemelrijck, D. Feasibility study on real-scale, self-healing concrete slab by developing a smart capsules network and assessed by a plethora of advanced monitoring techniques. Constr. Build. Mater. 2019, 228, 116780. [Google Scholar] [CrossRef]
- Patrick, M.K.; Adekoya, A.F.; Mighty, A.A.; Edward, B.Y. Capsule networks—A survey. J. King Saud Univ. Comput. Inf. Sci. 2022, 34, 1295–1310. [Google Scholar]
- Zhao, A.; Dong, J.; Li, J.; Qi, L.; Zhou, H. Associated Spatio-Temporal Capsule Network for Gait Recognition. IEEE Trans. Multimed. 2021, 24, 846–860. [Google Scholar] [CrossRef]
- Paik, I.; Kwak, T.; Kim, I. Capsule networks need an improved routing algorithm. In Proceedings of the Asian Conference on Machine Learning, PMLR, Nagoya, Japan, 17–19 November 2019; pp. 489–502. [Google Scholar]
- Li, D.; Lin, C.; Gao, W.; Chen, Z.; Wang, Z.; Liu, G. Capsules TCN network for urban computing and intelligence in urban traffic prediction. Wirel. Commun. Mob. Comput. 2020, 2020, 6896579. [Google Scholar] [CrossRef]
- Ma, X.; Zhong, H.; Li, Y.; Ma, J.; Cui, Z.; Wang, Y. Forecasting transportation network speed using deep capsule networks with nested LSTM models. IEEE Trans. Intell. Transp. Syst. 2020, 22, 4813–4824. [Google Scholar] [CrossRef] [Green Version]
- Kim, Y.; Wang, P.; Zhu, Y.; Mihaylova, L. A capsule network for traffic speed prediction in complex road networks. In Proceedings of the 2018 Sensor Data Fusion: Trends, Solutions, Applications (SDF), Bonn, Germany, 9–11 October 2018; IEEE: Piscataway, NJ, USA, 2018; pp. 1–6. [Google Scholar]
- Chen, N.; Chen, Y.; Blasch, E.; Ling, H.; You, Y.; Ye, X. Enabling smart urban surveillance at the edge. In Proceedings of the 2017 IEEE International Conference on Smart Cloud (SmartCloud), New York, NY, USA, 3–5 November 2017; IEEE: Piscataway, NJ, USA, 2017; pp. 109–119. [Google Scholar]
- Xie, L.; Zou, S.; Xie, Y.; Veeravalli, V.V. Sequential (Quickest) Change Detection: Classical Results and New Directions. IEEE J. Sel. Areas Inf. Theory 2021, 2, 494–514. [Google Scholar] [CrossRef]












{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Notation | Description |
|---|---|
| time series with length N | |
| X | trajectory matrix constructed from |
| time series with k channel | |
| M | window length |
| l | the number of eigenvalues selected |
| base matrix at nth iteration | |
| test matrix at nth iteration | |
| distance between base and test matrix | |
| time series of S characteristics for K vehicles with length N | |
| set of K vehicles | |
| trajectory matrix of time series of jth characteristic of nth vehicle | |
| base vehicle time series for distance calculation | |
| distance from each vehicle to the base vehicle time series | |
| anomaly score for nth vehicle | |
| h | threshold to determine anomalies |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Chen, N.; Chen, Y. Anomalous Vehicle Recognition in Smart Urban Traffic Monitoring as an Edge Service. Future Internet 2022, 14, 54. https://doi.org/10.3390/fi14020054
Chen N, Chen Y. Anomalous Vehicle Recognition in Smart Urban Traffic Monitoring as an Edge Service. Future Internet. 2022; 14(2):54. https://doi.org/10.3390/fi14020054
Chicago/Turabian StyleChen, Ning, and Yu Chen. 2022. "Anomalous Vehicle Recognition in Smart Urban Traffic Monitoring as an Edge Service" Future Internet 14, no. 2: 54. https://doi.org/10.3390/fi14020054