
Implementation of Novel Evolutional Algorithm for 3-Dimensional Radiation Mapping and Gamma-Field Reconstruction within the Chornobyl Sarcophagus



{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Abstract
:1. Introduction
1.1. The Chornobyl Accident and New Safe Confinement
1.2. Radiation Detection, Localisation, and Mapping
1.3. 3-Dimensional Radiation Analysis
1.4. Technology Application to the ChNPP
2. Evolutional Computational Methodology for Radiation Mapping
2.1. Available Historic NSC and SO Radiometric Datasets
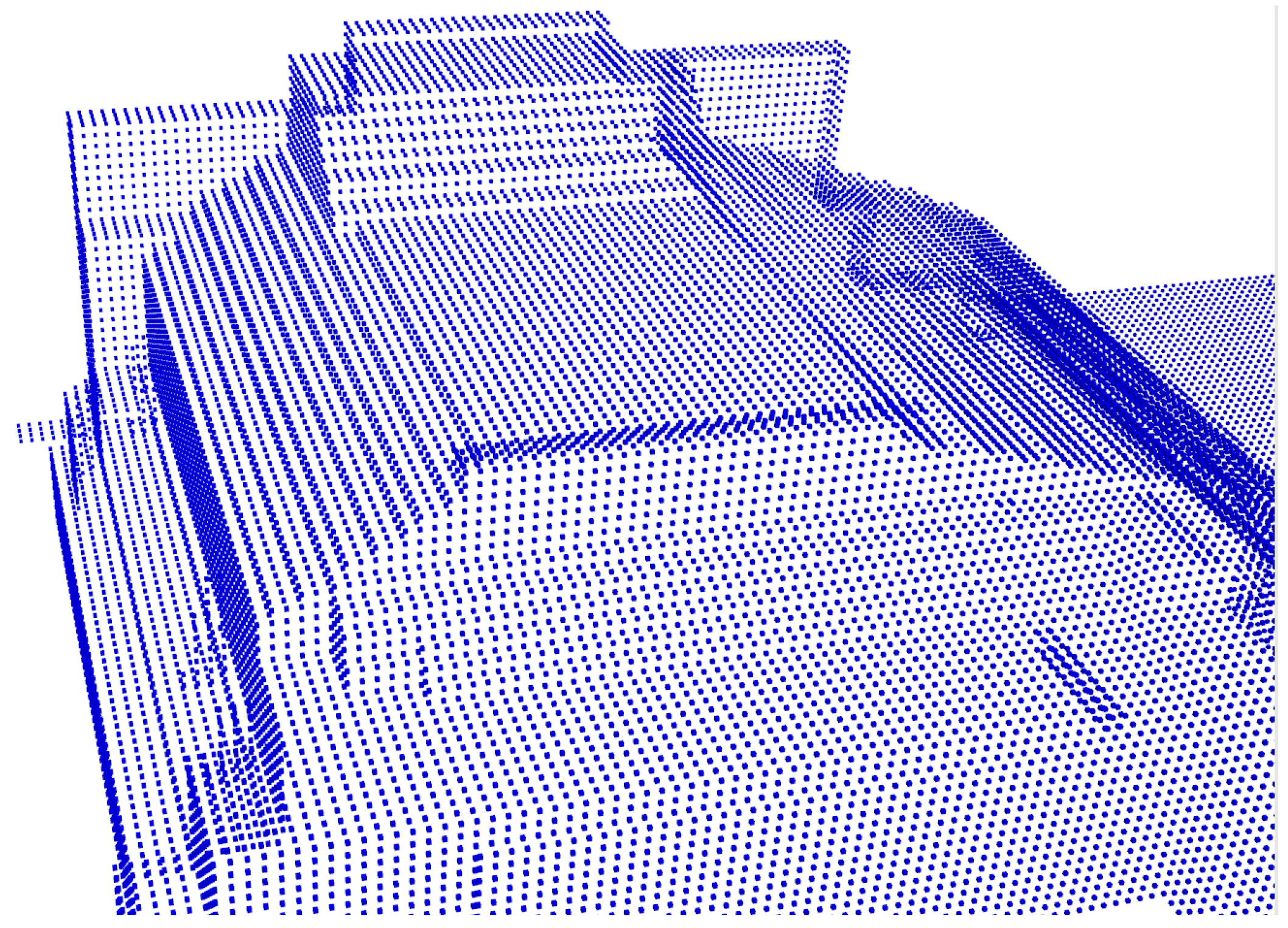
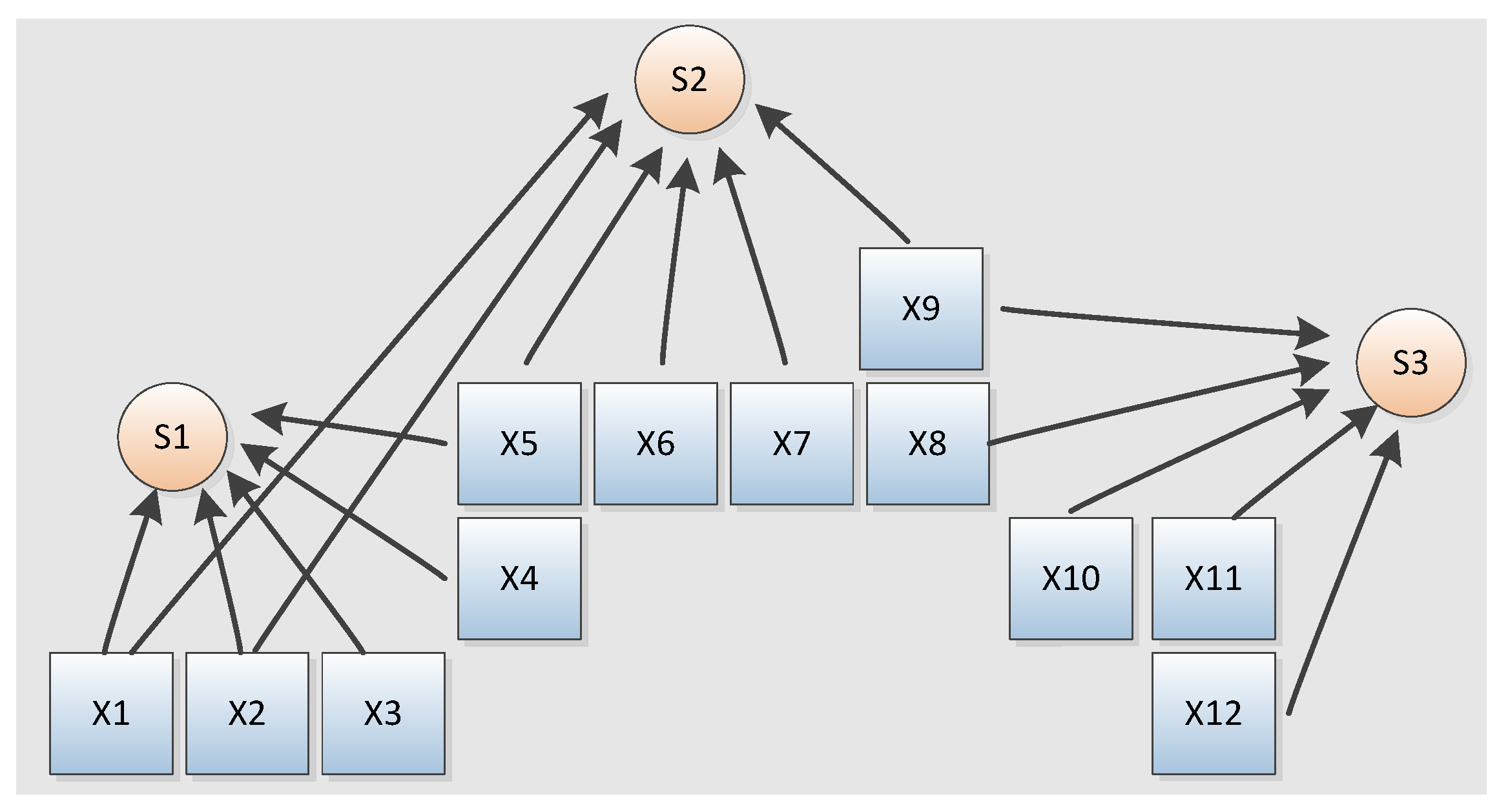
2.2. Simplified Radioactivity Model of the Shelter Object
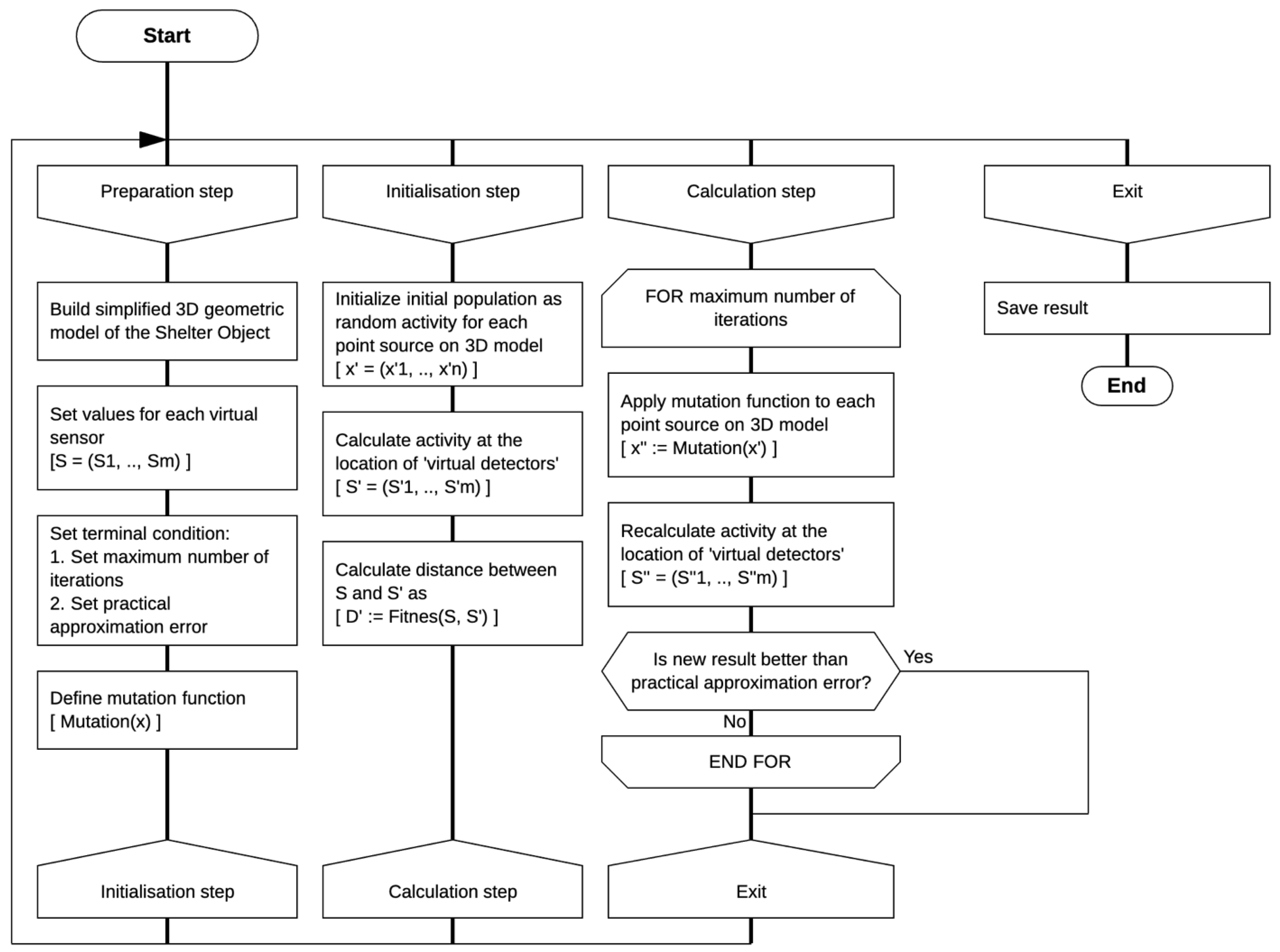
2.3. Algorithm Description
| Algorithm 1 Pseudocode |
| BEGIN INITIALISE population; DEFINE FUNCTION Mutation(); DEFINE FUNCTION Fitness(); DEFINE FUNCTION Terminal_Condition(); REPEAT new_population:= Mutation(population); IF (Fitness(new_population) BETTER THAN Fitness(population)) THEN population:= new_population; END IF IF UNTIL Terminal_Condition(); END |
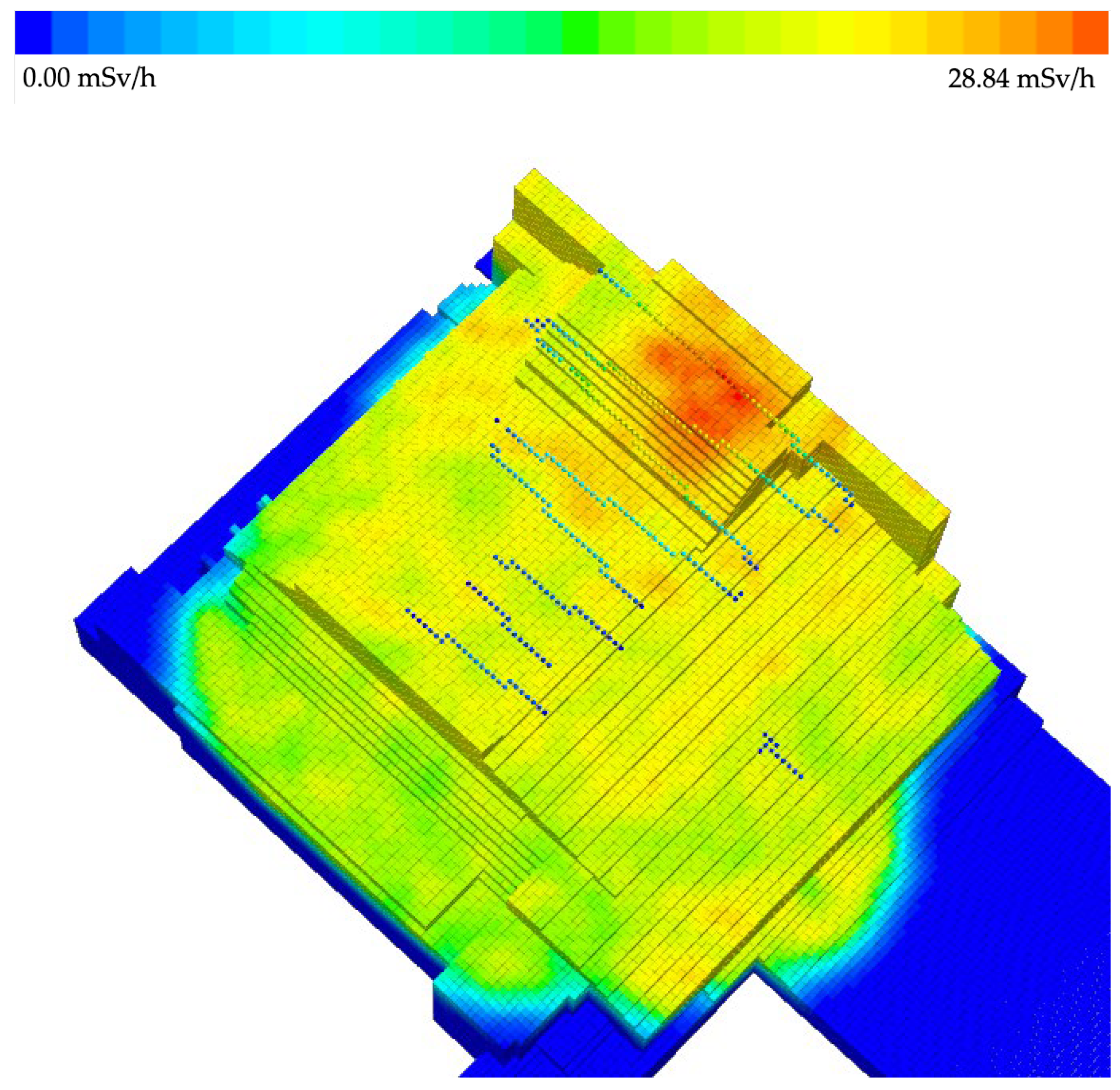
3. Results and Discussion
4. Conclusions
Author Contributions
Funding
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- International Atomic Energy Agency (IAEA). Environmental Consequences of the Chernobyl Accident and their Remediation: Twenty Years of Experience; International Atomic Energy Agency: Vienna, Austria, 2006; Available online: https://www-pub.iaea.org/MTCD/Publications/PDF/Pub1239_web.pdf (accessed on 4 January 2023).
- UN Chernobyl Forum Expert Group “Environment”. Environmental Consequences of the Chernobyl Accident and Their Remediation: Twenty Years of Experience. Report of the UN Chernobyl Forum Expert Group “Environment” (EGE). Available online: https://www-ns.iaea.org/downloads/rw/meetings/environ-consequences-report-wm-08.05.pdf (accessed on 3 March 2023).
- Nosovskij, A.V.; Vasil’chenko, V.N.; Klyuchnikov, A.A.; Prister, B.S. Accident on the Chernobyl Nuclear Power Plant. Getting over the Consequences and Lessons Learned (in Russian). Available online: http://inis.iaea.org/Search/search.aspx?orig_q=RN:40004144 (accessed on 19 January 2023).
- Nemchinov, Y.Y.; Bambura, A.M.; Sazonova, Y.P.; Babyik, K.M.; Shcherbyin, V.N.; Rud’ko, V.M. Assessment of the Shelter Structures to Be Dismantled after NSC Installation. Comparative Analysis of Dismantling Options. Yaderna ta Radyiatsyijna Bezpeka 2019, 1, 17–22. Available online: http://inis.iaea.org/Search/search.aspx?orig_q=RN:50038573 (accessed on 19 January 2023). [CrossRef]
- Knoll, G.F. Radiation Detection and Measurement; John Wiley & Sons: Hoboken, NJ, USA, 2010. [Google Scholar] [CrossRef]
- IAEA. Radioelement Mapping; International Atomic Energy Agency: Vienna, Austria, 2010; Available online: https://www.iaea.org/publications/7649/radioelement-mapping (accessed on 30 March 2020).
- Tsoulfanidis, N.; Landsberger, S. Measurement and Detection of Radiation, 4th ed.; CRC Press: Boca Raton, FL, USA, 2015; Available online: https://books.google.co.uk/books?hl=en&lr=&id=zRjSBQAAQBAJ&oi=fnd&pg=PP1&ots=ValJlvS7qj&sig=4JJ67_m48q6yyUCo1JsNuU_q2pU (accessed on 19 August 2016).
- IAEA. Guidelines for Radioelement Mapping Using Gamma Ray Spectrometry Data, IAEA-TECDOC-1363; International Atomic Energy Agency: Vienna, Austria, 2003; Available online: https://www-pub.iaea.org/MTCD/publications/PDF/te_1363_web.pdf (accessed on 22 February 2021).
- Sanada, Y.; Torii, T. Aerial radiation monitoring around the Fukushima Dai-ichi Nuclear Power Plant using an unmanned helicopter. J. Environ. Radioact. 2015, 139, 294–299. [Google Scholar] [CrossRef] [PubMed]
- Nishizawa, Y.; Yoshida, M.; Sanada, Y.; Torii, T. Distribution of the134Cs/137Cs ratio around the Fukushima Daiichi nuclear power plant using an unmanned helicopter radiation monitoring system. J. Nucl. Sci. Technol. 2015, 53, 468–474. [Google Scholar] [CrossRef]
- Shikaze, Y.; Nishizawa, Y.; Sanada, Y.; Torii, T.; Jiang, J.; Shimazoe, K.; Takahashi, H.; Yoshino, M.; Ito, S.; Endo, T.; et al. Field test around Fukushima Daiichi nuclear power plant site using improved Ce:Gd3(Al,Ga)5O12 scintillator Compton camera mounted on an unmanned helicopter. J. Nucl. Sci. Technol. 2016, 53, 1907–1918. [Google Scholar] [CrossRef] [Green Version]
- Lazna, T.; Gabrlik, P.; Jilek, T.; Zalud, L. Cooperation between an unmanned aerial vehicle and an unmanned ground vehicle in highly accurate localization of gamma radiation hotspots. Int. J. Adv. Robot. Syst. 2018, 15, 1729881417750787. [Google Scholar] [CrossRef] [Green Version]
- Peterson, J.; Li, W.; Cesar-Tondreau, B.; Bird, J.; Kochersberger, K.; Czaja, W.; McLean, M. Experiments in unmanned aerial vehicle/unmanned ground vehicle radiation search. J. Field Robot. 2019, 36, 818–845. [Google Scholar] [CrossRef]
- Coletti, M.; Hultquist, C.; Kennedy, W.G.; Cervone, G. Validating Safecast data by comparisons to a U. S. Department of Energy Fukushima Prefecture aerial survey. J. Environ. Radioact. 2017, 171, 9–20. [Google Scholar] [CrossRef] [Green Version]
- Hajagos, T.J.; Liu, C.; Cherepy, N.J.; Pei, Q. High-Z Sensitized Plastic Scintillators: A Review. Adv. Mater. 2018, 30, e1706956. [Google Scholar] [CrossRef]
- Ye, M.; Gong, P.; Wu, S.; Li, Y.; Zhou, C.; Zhu, X.; Tang, X. Lightweight SiPM-based CeBr3 gamma-ray spectrometer for radiation-monitoring systems of small unmanned aerial vehicles. Appl. Radiat. Isot. 2021, 176, 109848. [Google Scholar] [CrossRef]
- Jeon, B.; Kim, J.; Lee, E.; Moon, M.; Cho, G. Pseudo-Gamma Spectroscopy Based on Plastic Scintillation Detectors Using Multitask Learning. Sensors 2021, 21, 684. [Google Scholar] [CrossRef]
- Kaburagi, M.; Shimazoe, K.; Kato, M.; Kurosawa, T.; Kamada, K.; Kim, K.J.; Yoshino, M.; Shoji, Y.; Yoshikawa, A.; Takahashi, H.; et al. Gamma-ray spectroscopy with a CeBr3 scintillator under intense γ-ray fields for nuclear decommissioning. Nucl. Instrum. Methods Phys. Res. Sect. A 2021, 988, 164900. [Google Scholar] [CrossRef]
- Bilton, K.J. Data-driven Approaches to Spectral Gamma-Ray Source Detection and Identification. Ph.D. Thesis, University of California, Berkeley, CA, USA, 2020. [Google Scholar]
- Flanagan, R.R.; Brandt, L.J.; Osborne, A.G.; Deinert, M.R. Detecting nuclear materials in urban environments using mobile sensor networks. Sensors 2021, 21, 2196. [Google Scholar] [CrossRef] [PubMed]
- Marques, L.; Vale, A.; Vaz, P. State-of-the-Art Mobile Radiation Detection Systems for Different Scenarios. Sensors 2021, 21, 1051. [Google Scholar] [CrossRef]
- Sasaki, M.; Sanada, Y.; Katengeza, E.W.; Yamamoto, A. New method for visualizing the dose rate distribution around the Fukushima Daiichi Nuclear Power Plant using artificial neural networks. Sci. Rep. 2021, 11, 11. [Google Scholar] [CrossRef]
- Salathe, M.; Bandstra, M.S.; Quiter, B.J.; Curtis, J.C. Using 3D-Scene Data from a Mobile Detector System to Model Gamma-Ray Backgrounds. In Proceedings of the 2019 IEEE Nuclear Science Symposium and Medical Imaging Conference (NSS/MIC), Manchester, UK, 26 October–2 November 2019; p. 4. [Google Scholar] [CrossRef]
- Pavlovsky, R.; Cates, J.W.; Vanderlip, W.J.; Joshi, T.H.Y.; Haefner, A.; Suzuki, E.; Barnowski, R.; Negut, V.; Moran, A.; Vetter, K.; et al. 3D Gamma-ray and Neutron Mapping in Real-Time with the Localisation and Mapping Platform from Unmanned Aerial Systems and Man-Portable Configurations. arXiv 2019. Available online: http://arxiv.org/abs/1908.06114 (accessed on 29 January 2021).
- Vetter, K.; Barnowski, R.; Cates, J.W.; Haefner, A.; Joshi, T.H.; Pavlovsky, R.; Quiter, B.J. Advances in Nuclear Radiation Sensing: Enabling 3-D Gamma-Ray Vision. Sensors 2019, 19, 2541. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Bandstra, M.S.; Hellfeld, D.; Vavrek, J.R.; Quiter, B.J.; Meehan, K.; Barton, P.J.; Cates, J.W.; Moran, A.; Negut, V.; Pavlovsky, R.; et al. Improved Gamma-Ray Point Source Quantification in Three Dimensions by Modeling Attenuation in the Scene. IEEE Trans. Nucl. Sci. 2021, 68, 2637–2646. [Google Scholar] [CrossRef]
- Henderson, K.; Liu, X.; Stadnikia, K.; Martin, A.; Enqvist, A.; Koppal, S.J. Proximity-Based Sensor Fusion of Depth Cameras and Isotropic Rad-Detectors. IEEE Trans. Nucl. Sci. 2020, 67, 840–857. [Google Scholar] [CrossRef]
- Pavlovsky, R.; Haefner, A.; Joshi, T.; Negut, V.; McManus, K.; Suzuki, E.; Barnowski, R.; Vetter, K. 3-D Radiation Mapping in Real-Time with the Localization and Mapping Platform LAMP from Unmanned Aerial Systems and Man-Portable Configurations. arXiv 2018. Available online: http://arxiv.org/abs/1901.05038 (accessed on 29 January 2021).
- Bandstra, M.S.; Quiter, B.J.; Curtis, J.C.; Bilton, K.J.; Joshi, T.H.; Meyer, R.; Negut, V.; Vetter, K.; Archer, D.E.; Hornback, D.E.; et al. Attribution of gamma-ray background collected by a mobile detector system to its surroundings using panoramic video. Nucl. Instrum. Methods Phys. Res. Sect. A 2020, 954, 161126. [Google Scholar] [CrossRef]
- White, S.R.; Wood, K.T.; Martin, P.G.; Connor, D.T.; Scott, T.B.; Megson-Smith, D.A. Radioactive Source Localisation via Projective Linear Reconstruction. Sensors 2021, 21, 807. [Google Scholar] [CrossRef] [PubMed]
- Zabulonov, Y.L.; Popov, O.O.; Iatsyshyn, A.V.; Iatsyshyn, A.V.; Puhach, O.V.; Stokolos, M.O. Modern technical and software-analytical tools for solving problems of radiation and technogenic-ecological safety of Ukraine. IOP Conf. Ser. Earth Environ. Sci. 2022, 1049, 012013. [Google Scholar] [CrossRef]
- Anger, H.O. Use of a Gamma-Ray Pinhole Camera for in vivo Studies. Nature 1952, 170, 200–201. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Phillips, G.W. Gamma-ray imaging with Compton cameras. Nucl. Instrum. Methods Phys. Res. B 1995, 99, 674–677. [Google Scholar] [CrossRef]
- Everett, D.B.; Fleming, J.S.; Todd, R.W.; Nightingale, J.M. Gamma-radiation imaging system based on the compton effect. Proc. Inst. Electr. Eng. 1977, 124, 995. [Google Scholar] [CrossRef]
- Carrel, F.; Khalil, R.A.; Colas, S.; de Toro, D.; Ferrand, G.; Gaillard-Lecanu, E.; Gmar, M.; Hameau, D.; Jahan, S.; Laine, F.; et al. GAMPIX: A new gamma imaging system for radiological safety and Homeland Security Purposes. In Proceedings of the 2011 IEEE Nuclear Science Symposium Conference Record, Valencia, Spain, 23–29 October 2011; pp. 4739–4744. [Google Scholar] [CrossRef]
- Fenimore, E.E.; Cannon, T.M. Coded aperture imaging with uniformly redundant arrays. Appl. Opt. 1978, 17, 337. [Google Scholar] [CrossRef]
- Boardman, D.A.; Sarbutt, A.; Flynn, A.; Guenette, M.C. Single pixel compressive gamma-ray imaging with randomly encoded masks. J. Instrum. 2020, 15, P04014. [Google Scholar] [CrossRef]
- Istomin, N.; Pantin, M.; Saveliev, M. An example of import substitution in automated radiation control systems. In Proceedings of the INUDECO 2019, Slavutych, Ukraine, 24–27 April 2019; p. 102. [Google Scholar]
- ECOTEST Group Intelligent Detecting Unit of Gamma Radiation BDBG-09. Available online: https://ecotestgroup.com/products/bdbg-09/ (accessed on 5 January 2023).
- Saveliev, M.V.; Krasnov, V.A.; Levchenko, A.P.; Novikov, A.E.; Evstigneev, A.Y.; Pantin, M.A. Measuring the equivalent dose rate over the Shelter object after completion of the New Safe Confinement. Nucl. Power Environ. 2020, 19, 50–56. [Google Scholar] [CrossRef]
- Engelbrecht, A.P. Computational Intelligence: An Introduction, 2nd ed.; John Wiley & Sons: Hoboken, NJ, USA, 2007; Available online: https://books.google.co.uk/books?hl=en&lr=&id=IZosIcgJMjUC&oi=fnd&pg=PR7&dq=Engelbrecht,+A.+P.+(2007).+Computational+intelligence:+an+introduction.+John+Wiley+%26+Sons.&ots=Dxntv8xkPi&sig=rpSuTwa-jjlZQxoML_S3QY01-Qk&redir_esc=y#v=onepage&q=Engelbrecht%2C%20A.%20P.%20(2007).%20Computational%20intelligence%3A%20an%20introduction.%20John%20Wiley%20%26%20Sons.&f=false (accessed on 30 March 2023).
- Ramachandran, P.; Varoquaux, G. Mayavi: 3D visualization of scientific data. Comput. Sci. Eng. 2011, 13, 40–51. [Google Scholar] [CrossRef] [Green Version]







Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Saveliev, M.; Pantin, M.; Skiter, I.; Scott, T.B.; Martin, P.G. Implementation of Novel Evolutional Algorithm for 3-Dimensional Radiation Mapping and Gamma-Field Reconstruction within the Chornobyl Sarcophagus. Algorithms 2023, 16, 204. https://doi.org/10.3390/a16040204
Saveliev M, Pantin M, Skiter I, Scott TB, Martin PG. Implementation of Novel Evolutional Algorithm for 3-Dimensional Radiation Mapping and Gamma-Field Reconstruction within the Chornobyl Sarcophagus. Algorithms. 2023; 16(4):204. https://doi.org/10.3390/a16040204
Chicago/Turabian StyleSaveliev, Maxim, Maksym Pantin, Igor Skiter, Thomas B. Scott, and Peter G. Martin. 2023. "Implementation of Novel Evolutional Algorithm for 3-Dimensional Radiation Mapping and Gamma-Field Reconstruction within the Chornobyl Sarcophagus" Algorithms 16, no. 4: 204. https://doi.org/10.3390/a16040204