
Low-Order Electrochemical State Estimation for Li-Ion Batteries


Abstract
:1. Introduction
2. Methodology and Models
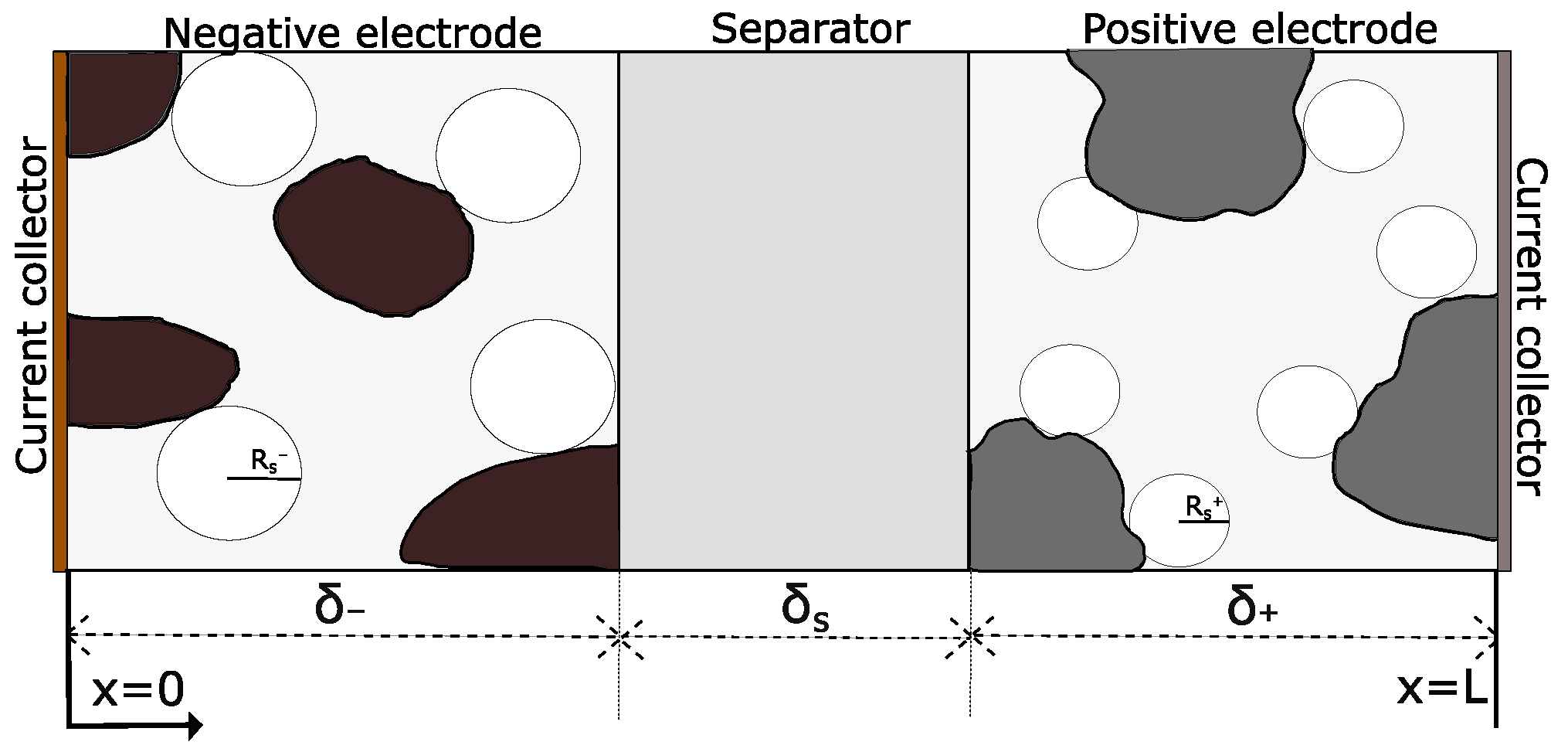
2.1. The Single Particle Model Revisited
- Solid phase
- Electrolyte phase
- Reaction rate
- Energy balance
2.2. Numerical Model
- Electrolyte current
- Electrolyte concentration
- Electrolyte potential
- Electrode concentration
- Output voltage
- Electrode potentials
- State of charge
- Surface SOC, regarding only the surface of the particle:
- Bulk SOC, which contemplates the spatial profiles of the whole spheres:
2.3. Dynamic Mode Decomposition with Control
- Reduced order modelling
2.4. Application to the Pseudo Single Particle Model
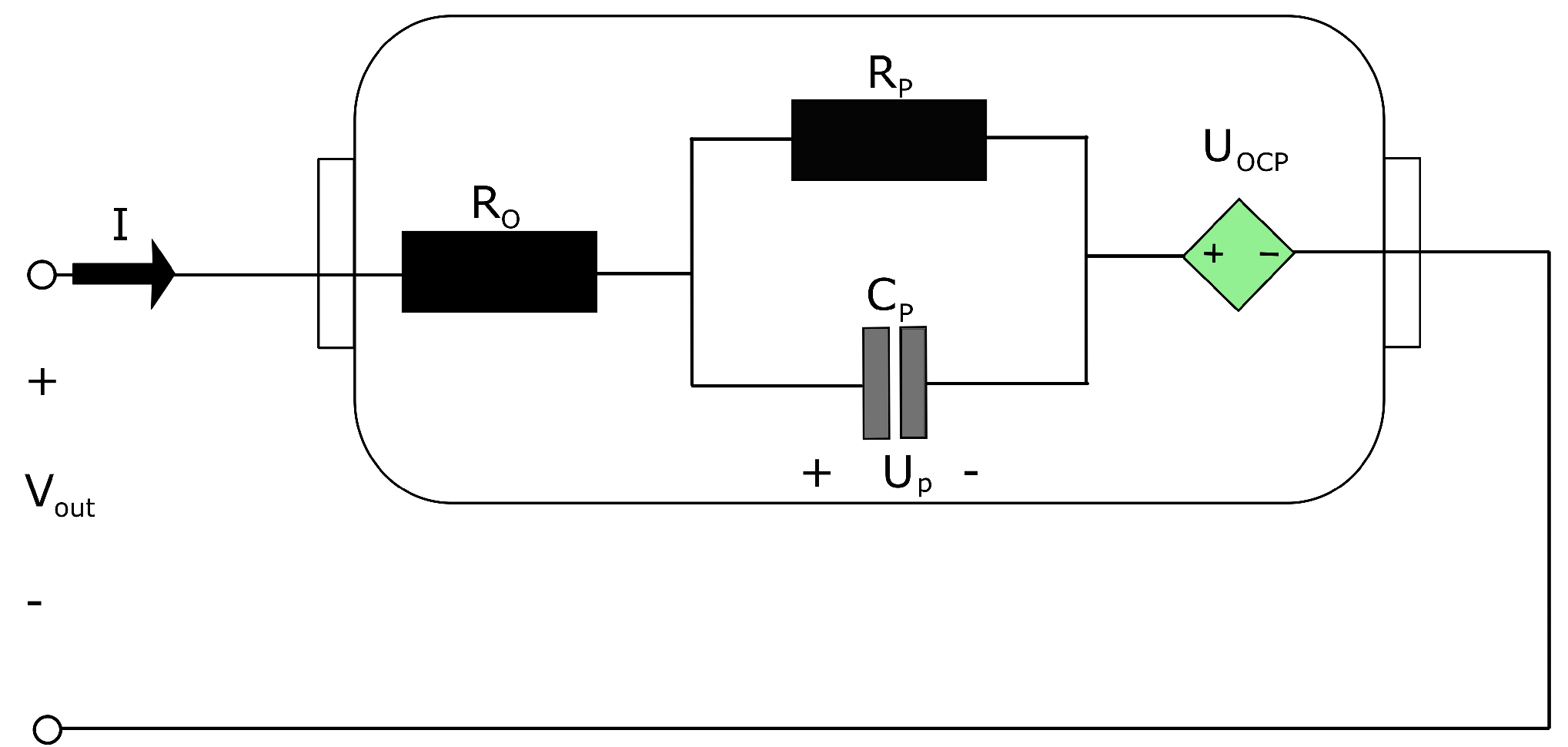
2.5. Improved Equivalent Circuit Model
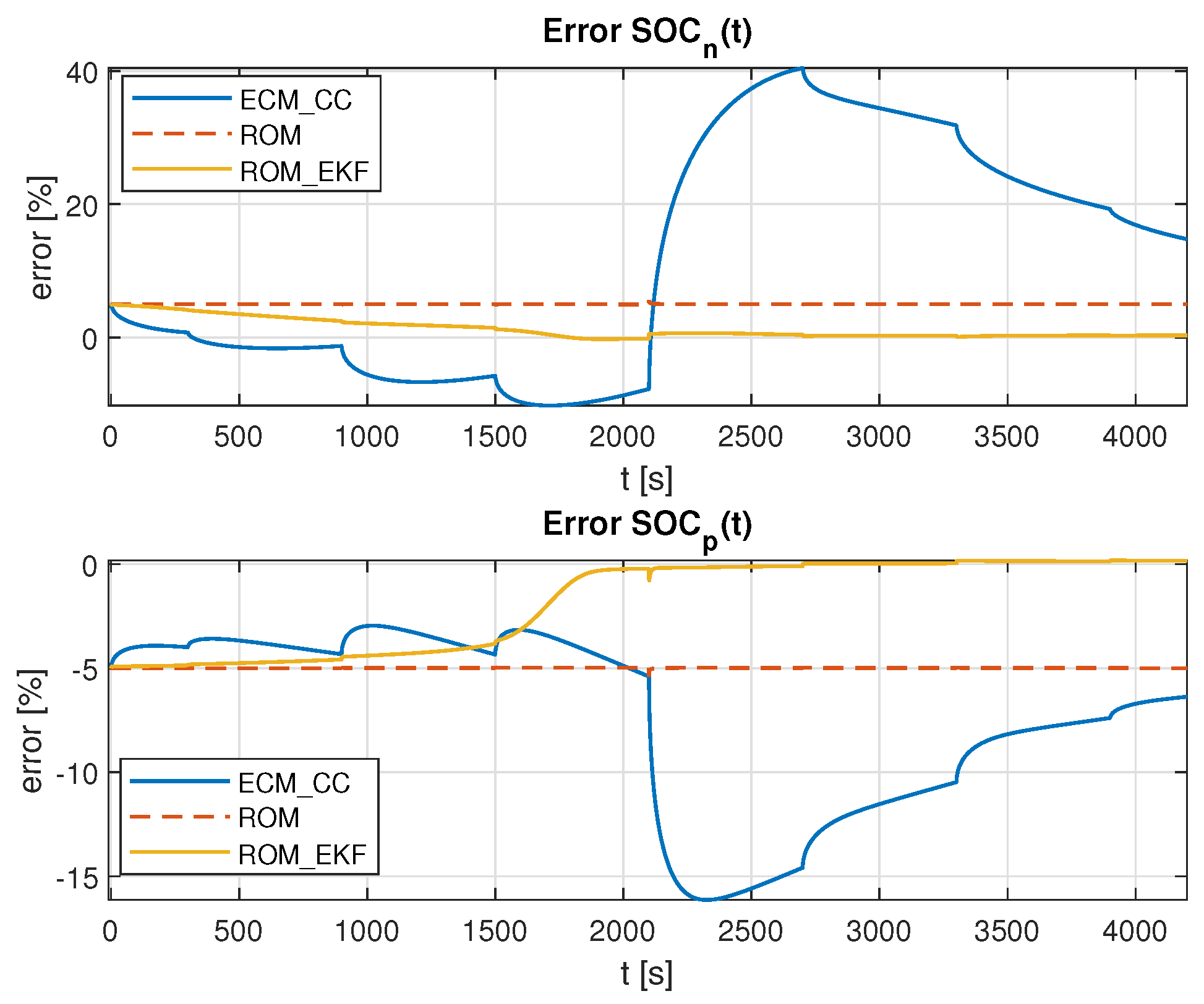
2.6. State Estimation
3. Evaluation Study
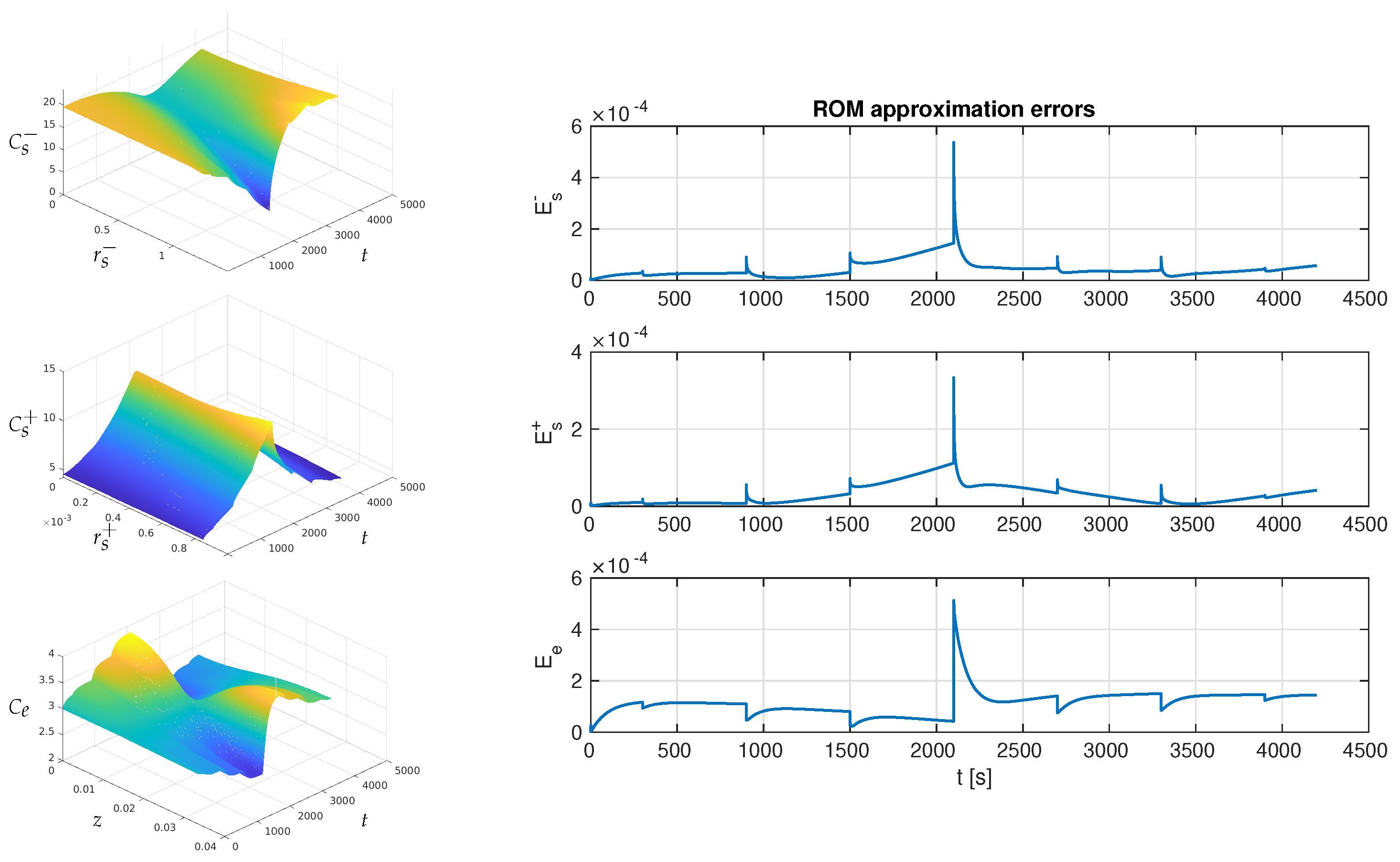
3.1. Numerical Evaluation
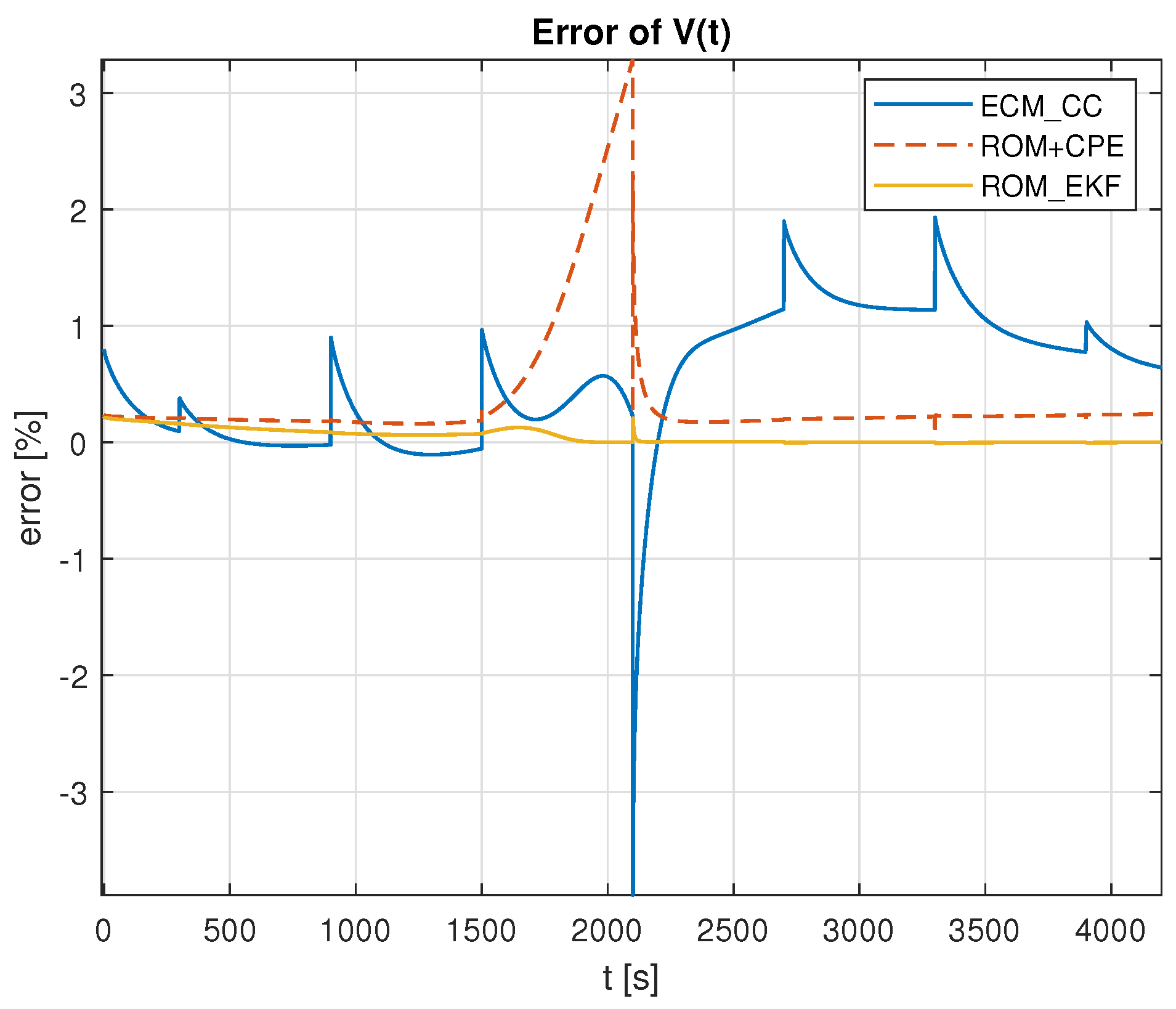
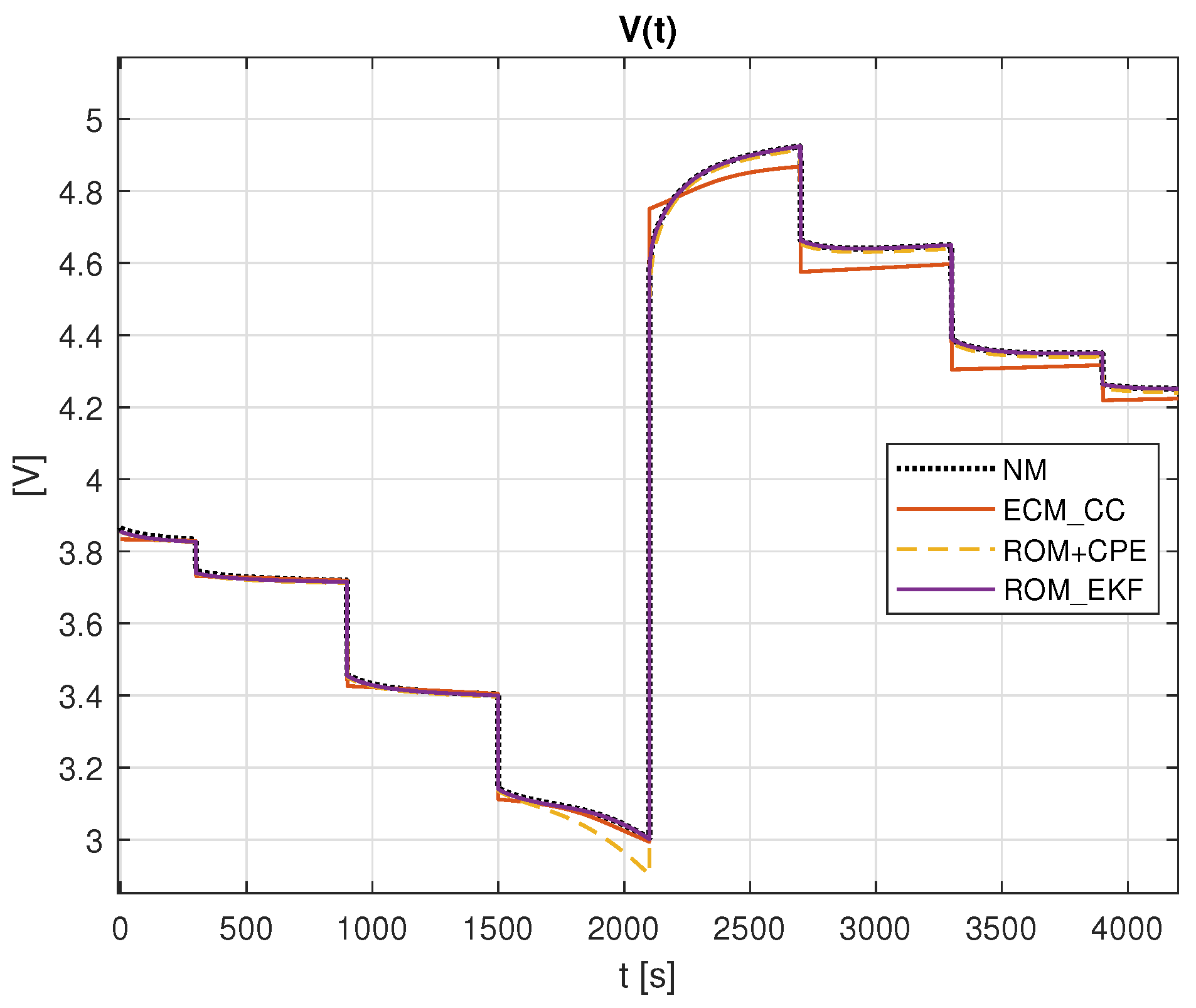
3.2. Discussion
4. Conclusions
5. Future Work
Author Contributions
Funding
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
Abbreviations
| CPE | Continuous parameter estimation/adaptation |
| DMDc | Dynamic Mode Decomposition with control |
| DMD | Dynamic Mode Decomposition |
| ECM | Equivalent Circuit Model |
| EKF | Extended Kalman Filter |
| I/O | Input/Output |
| Li-ion | Lithium ions |
| ROM | Reduced Order Model |
| SOC | State Of Charge |
| SVD | Singular Value Decomposition |
Appendix A. Matrices for the Finite-Difference Approximation
Appendix B. Modell Parameters

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameter | Value | Description |
|---|---|---|
| [cm/s] | Diffusion coefficient negative electrode | |
| [cm/s] | Diffusion coefficient positive electrode | |
| [cm/s] | Diffusion coefficient electrolyte | |
| [mol/dm] | 24.49 | Maximum concentration of negative electrode |
| [mol/dm] | 22.86 | Maximum concentration of positive electrode |
| [mol/dm] | 20 | Maximum concentration of electrolyte |
| [m] | 12.15 | Radius of negative electrode particle |
| [m] | 8.50 | Radius of positive electrode particle |
| 0.185 | Volume fraction | |
| [S/cm] | 1 | Conductivity negative electrode |
| [S/cm] | 0.038 | Conductivity positive electrode |
| [S/cm] | 2.8 | Ionic conductivity of electrolyte |
| 0.5 | Reaction rate | |
| 0.2 | Transfer number of electrolyte | |
| m] | 100 | Length of negative electrode |
| m] | 174 | Length of positive electrode |
| m] | 52 | Length of electrolyte |
| 1000 | Film resistance negative electrode | |
| 1200 | Film resistance positive electrode | |
| 0.0122 | Rate constant anodic direct. | |
| 0.0058 | Rate constant cathodic direct. | |
| T [K] | 298.15 | Temperature |
| F [A· /mol] | 96,485.3 | Faraday’s constant |
| R [J/mol · K] | 8.314 | Gas constant |
| [mA· h/cm | 5.76 | C rate current |
| [Mg/m | 1.459 | Average mass per unit area |
| [J/Kg · K] | 2000 | Heat capacity |
| [W/m· K] | 60 | Heat transfer coefficient |
References
- Jossen, A. Fundamentals of battery dynamics. J. Power Sources 2006, 154, 530–538. [Google Scholar] [CrossRef]
- Valis, D.; Hasilova, K.; Leuchter, J. Modelling of influence of various operational conditions on Li-ion battery capability. In Proceedings of the 2016 IEEE International Conference on Industrial Engineering and Engineering Management (IEEM), Bali, Indonesia, 4–7 December 2016; pp. 536–540. [Google Scholar] [CrossRef]
- Ecker, M.; Shafiei Sabet, P.; Sauer, D.U. Influence of operational condition on lithium plating for commercial lithium-ion batteries—Electrochemical experiments and post-mortem-analysis. Appl. Energy 2017, 206, 934–946. [Google Scholar] [CrossRef]
- Zou, C.; Manzie, C.; Nešić, D. A Framework for Simplification of PDE-Based Lithium-Ion Battery Models. IEEE Trans. Control Syst. Technol. 2016, 24, 1594–1609. [Google Scholar] [CrossRef]
- Newman, J.; Tiedemann, W. Porous-electrode theory with battery applications. AIChE J. 1975, 21, 25–41. [Google Scholar] [CrossRef] [Green Version]
- Doyle, C. Design and Simulation of Lithium Rechargeable Batteries. Ph.D. Thesis, University of California, Lawrence Berkeley National Laboratory, Berkeley, CA, USA, 1995. [Google Scholar]
- Doyle, M.; Newman, J. The use of mathematical modeling in the design of lithium/polymer battery systems. Electrochim. Acta 1995, 40, 2191–2196. [Google Scholar] [CrossRef]
- Changfu, Z.; Manzie, C.; Nesic, D. PDE battery model simplification for charging strategy evaluation. In Proceedings of the 2015 10th Asian Control Conference (ASCC), Kinabalu, Malaysia, 31 May–3 June 2015; IEEE: Piscataway, NJ, USA, 2015; pp. 1–6. [Google Scholar]
- Doyle, M.; Fuller, T.F.; Newman, J. Modelling the Galvanostatic Charge and Discharge of the Lithium/Polymer/Insertion Cell. J. Electrochem. Soc. 1992, 140, 1526. [Google Scholar] [CrossRef]
- Kroener, C. A Mathematical Exploration of a PDE System for Lithium-Ion Batteries. Ph.D. Thesis, UC Berkeley, Berkeley, CA, USA, 2016. [Google Scholar]
- Perez, H.E. Model Based Optimal Control, Estimation, and Validation of Lithium-Ion Batteries. Ph.D. Thesis, UC Berkeley, Berkeley, CA, USA, 2016. [Google Scholar]
- Doyle, M.; Newman, J.; Gozdz, A.S.; Schmutz, C.N.; Tarascon, J.M. Comparison of Modeling Predictions with Experimental Data from Plastic Lithium Ion Cells. J. Electrochem. Soc. 1996, 143, 1890. [Google Scholar] [CrossRef]
- Thomas, K.E.; Newman, J.; Darling, R.M. Mathematical Modeling of Lithium Batteries. In Advances in Lithium-Ion Batteries; van Schalkwijk, W.A., Scrosati, B., Eds.; Springer: Boston, MA, USA, 2002; pp. 345–392. [Google Scholar]
- Klein, R.; Chaturvedi, N.A.; Christensen, J.; Ahmed, J.; Findeisen, R.; Kojic, A. State estimation of a reduced electrochemical model of a lithium-ion battery. In Proceedings of the 2010 American Control Conference, Baltimore, MD, USA, 30 June–2 July 2010; pp. 6618–6623. [Google Scholar]
- Klein, R.; Chaturvedi, N.A.; Christensen, J.; Ahmed, J.; Findeisen, R.; Kojic, A. Electrochemical model based observer design for a lithium-ion battery. IEEE Trans. Control Syst. Technol. 2012, 21, 289–301. [Google Scholar] [CrossRef]
- Tang, S.; Wang, Y.; Sahinoglu, Z.; Wada, T.; Hara, S.; Krstic, M. State-of-charge estimation for lithium-ion batteries via a coupled thermal-electrochemical model. In Proceedings of the 2015 American Control Conference (ACC), Chicago, IL, USA, 1–3 July 2015; pp. 5871–5877. [Google Scholar]
- Perez, H.; Shahmohammadhamedani, N.; Moura, S. Enhanced performance of li-ion batteries via modified reference governors and electrochemical models. IEEE/ASME Trans. Mechatronics 2015, 20, 1511–1520. [Google Scholar] [CrossRef]
- Perez, H.E.; Hu, X.; Moura, S.J. Optimal charging of batteries via a single particle model with electrolyte and thermal dynamics. In Proceedings of the 2016 American Control Conference (ACC), IEEE, Boston, MA, USA, 6–8 July 2016; pp. 4000–4005. [Google Scholar]
- Romagnoli, R.; Couto, L.D.; Kinnaert, M.; Garone, E. Control of the state-of-charge of a li-ion battery cell via reference governor. IFAC-PapersOnLine 2017, 50, 13747–13753. [Google Scholar] [CrossRef]
- Santhanagopalan, S.; Guo, Q.; Ramadass, P.; White, R.E. Review of models for predicting the cycling performance of lithium ion batteries. J. Power Sources 2006, 156, 620–628. [Google Scholar] [CrossRef]
- Zheng, F.; Xing, Y.; Jiang, J.; Sun, B.; Kim, J.; Pecht, M. Influence of different open circuit voltage tests on state of charge online estimation for lithium-ion batteries. Appl. Energy 2016, 183, 513–525. [Google Scholar] [CrossRef]
- Rausch, M.; Streif, S.; Pankiewitz, C.; Findeisen, R. Nonlinear observability and identifiability of single cells in battery packs. In Proceedings of the 2013 IEEE International Conference on Control Applications (CCA), Hyderabad, India, 28–30 August 2013; pp. 401–406. [Google Scholar]
- Chen, J.; Ouyang, Q.; Xu, C.; Su, H. Neural Network-Based State of Charge Observer Design for Lithium-Ion Batteries. IEEE Trans. Control Syst. Technol. 2018, 26, 313–320. [Google Scholar] [CrossRef]
- How, D.N.T.; Hannan, M.A.; Hossain Lipu, M.S.; Ker, P.J. State of Charge Estimation for Lithium-Ion Batteries Using Model-Based and Data-Driven Methods: A Review. IEEE Access 2019, 7, 136116–136136. [Google Scholar] [CrossRef]
- Di Domenico, D.; Fiengo, G.; Stefanopoulou, A. Lithium-ion battery state of charge estimation with a Kalman Filter based on a electrochemical model. In Proceedings of the 2008 IEEE International Conference on Control Applications, Antonio, TX, USA, 3–5 September 2008; pp. 702–707. [Google Scholar] [CrossRef] [Green Version]
- Di Domenico, D.; Stefanopoulou, A.; Fiengo, G. Lithium-Ion Battery State of Charge and Critical Surface Charge Estimation Using an Electrochemical Model-Based Extended Kalman Filter. J. Dyn. Syst. Meas. Control 2010, 132. [Google Scholar] [CrossRef]
- Smith, K.A.; Rahn, C.D.; Wang, C.Y. Control oriented 1D electrochemical model of lithium ion battery. Energy Convers. Manag. 2007, 48, 2565–2578. [Google Scholar] [CrossRef]
- Fan, G.; Canova, M. Model Order Reduction of Electrochemical Batteries Using Galerkin Method. In Proceedings of the Dynamic Systems and Control Conference, American Society of Mechanical Engineers (ASME), Columbus, OH, USA, 28–30 October 2015. [Google Scholar] [CrossRef]
- Fan, G.; Li, X.; Canova, M. A Reduced-Order Electrochemical Model of Li-Ion Batteries for Control and Estimation Applications. IEEE Trans. Veh. Technol. 2018, 67, 76–91. [Google Scholar] [CrossRef]
- Li, C.; Cui, N.; Wang, C.; Zhang, C. Reduced-order electrochemical model for lithium-ion battery with domain decomposition and polynomial approximation methods. Energy 2021, 221, 119662. [Google Scholar] [CrossRef]
- Li, Y.; Karunathilake, D.; Vilathgamuwa, D.M.; Mishra, Y.; Farrell, T.W.; Choi, S.S.; Zou, C. Model Order Reduction Techniques for Physics-Based Lithium-Ion Battery Management: A Survey. IEEE Ind. Electron. Mag. 2022, 16, 36–51. [Google Scholar] [CrossRef]
- Kutz, J.N.; Brunton, S.L.; Brunton, B.W.; Proctor, J.L. Dynamic Mode Decomposition: Data-Driven Modeling of Complex Systems; Society for Industrial and Applied Mathematics: Philadelphia, PA, USA, 2016. [Google Scholar]
- Tu, J.H.; Rowley, C.W.; Luchtenburg, D.M.; Brunton, S.L.; Kutz, J.N. On Dynamic Mode Decomposition: Theory and Applications. J. Comput. Dyn. 2014, 1, 391–421. [Google Scholar] [CrossRef] [Green Version]
- Proctor, J.L.; Brunton, S.L.; Kutz, J.N. Dynamic mode decomposition with control. arXiv 2014, arXiv:1409.6358. [Google Scholar] [CrossRef] [Green Version]
- Brunton, S.L.; Kutz, J.N. Data-Driven Science and Engineering: Machine Learning, Dynamical Systems, and Control; Cambridge University Press: Cambridge, UK, 2019. [Google Scholar]
- Lusch, B.; Kutz, J.N.; Brunton, S.L. Deep learning for universal linear embeddings of nonlinear dynamics. Nat. Commun. 2018, 9, 4950. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Baumann, H.; Schaum, A.; Meurer, T. Data-driven control-oriented reduced order modeling for open channel flows. IFAC-PapersOnLine 2022, 55, 193–199. [Google Scholar] [CrossRef]
- Abu-Seif, M.A.; Abdel-Khalik, A.S.; Hamad, M.S.; Hamdan, E.; Elmalhy, N.A. Data-Driven modeling for Li-ion battery using dynamic mode decomposition. Alex. Eng. J. 2022, 61, 11277–11290. [Google Scholar] [CrossRef]
- Moreno, H.; Schaum, A. Reduced-order electrochemical modelling of Lithium-ion batteries. In Proceedings of the 1st IFAC Workshop on Control of Complex Systems (COSY), Bologna, Italy, 24–25 November 2022; 2022. [Google Scholar]
- Luenberger, D. An introduction to observers. IEEE Trans. Autom. Control 1971, 16, 596–602. [Google Scholar] [CrossRef]
- Luenberger, D.G. Observing the State of a Linear System. IEEE Trans. Mil. Electron. 1964, 8, 74–80. [Google Scholar] [CrossRef]
- Zeitz, M. The extended Luenberger observer for nonlinear systems. Syst. Control Lett. 1987, 9, 149–156. [Google Scholar] [CrossRef]
- Jazwinski, A.H. Stochastic Processes and Filtering Theory; Academic Press: New York, NY, USA, 1970. [Google Scholar]
- Daum, F.E. Extended Kalman Filters. In Encyclopedia of Systems and Control; Baillieul, J., Samad, T., Eds.; Springer: London, UK, 2015; pp. 411–413. [Google Scholar]
- Lai, X.; Huang, Y.; Han, X.; Gu, H.; Zheng, Y. A novel method for state of energy estimation of lithium-ion batteries using particle filter and extended Kalman filter. J. Energy Storage 2021, 43, 103269. [Google Scholar] [CrossRef]
- Xiong, R.; Gong, X.; Mi, C.C.; Sun, F. A robust state-of-charge estimator for multiple types of lithium-ion batteries using adaptive extended Kalman filter. J. Power Sources 2013, 243, 805–816. [Google Scholar] [CrossRef]
- Rezoug, M.R.; Taibi, D.; Benaouadj, M. State-of-charge Estimation of Lithium-ion Batteries Using Extended Kalman Filter. In Proceedings of the 2021 10th International Conference on Power Science and Engineering (ICPSE), Istanbul, Turkey, 21–23 October 2021; pp. 98–103. [Google Scholar]
- Surana, A. Koopman Operator Based Observer Synthesis for Control-Affine Nonlinear Systems. In Proceedings of the IEEE 55th Conference on Decision and Control (CDC), Las Vegas, NV, USA, 12–14 December 2016; pp. 6492–6499. [Google Scholar]
- Surana, A.; Banaszuk, A. Linear observer synthesis for nonlinear systems using Koopman Operator framework. IFAC-PapersOnLine 2016, 49, 716–723. [Google Scholar] [CrossRef]
- Gomez, D.F.; Lagor, F.D.; Kirk, P.B.; Lind, A.H.; Jones, A.R.; Paley, D.A. Data-driven estimation of the unsteady flowfield near an actuated airfoil with embedded pressure sensors. J Guid. Control. Dyn. 2019, 42, 2279. [Google Scholar] [CrossRef]
- Vijayshankar, S.; Nabi, S.; Chakrabarty, A.; Grover, P.; Benosman, M. Dynamic Mode Decomposition and Robust Estimation: Case Study of a 2D Turbulent Boussinesq Flow. In Proceedings of the 2020 American Control Conference, Denver, CO, USA, 1–3 July 2020; pp. 2351–2356. [Google Scholar]
- Otto, S.E.; Rowley, C.W. Koopman Operators for Estimation and Control of Dynamical Systems. Annu. Rev. Control. Robot. Auton. Syst. 2021, 4, 59–87. [Google Scholar] [CrossRef]
- Schaum, A. Autoencoder-Based Reduced Order Observer Design for a Class of Diffusion-Convection-Reaction Systems. Algorithms 2021, 14, 330. [Google Scholar] [CrossRef]
- Fuller, T.F.; Doyle, M.; Newman, J. Simulation and Optimization of the Dual Lithium Ion Insertion Cell. J. Electrochem. Soc. 1994, 141, 1–10. [Google Scholar] [CrossRef]
- Aikens, D. Electrochemical Methods, Fundamentals and Applications; ACS Publications: Washington, DC, USA, 1983. [Google Scholar]
- Farlow, S. Partial Differential Equations for Scientists and Engineers; Dover books on advanced mathematics; Dover Publications: Mineola, NY, USA, 1993. [Google Scholar]
- Gelb, A. Applied Optimal Estimation; M.I.T. Press: Cambridge, MA, USA, 1978. [Google Scholar]






| Numerical Model | ROM | |
|---|---|---|
| 60 | 9 | |
| 60 | 6 | |
| 60 | 2 | |
| 60 | 2 | |
| 130 | 4 | |
| 130 | 9 | |
| total | 500 | 32 |
| RMSE | 2.8 | 2.7 | 1.8 | 2.3 | 5.8 | 5.4 |
| V(t) | |||
|---|---|---|---|
| ROM | 5.0 | 5.0 | 2.3 |
| ROM+EKF | 1.9 | 2.8 | 2.9 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Moreno, H.; Schaum, A. Low-Order Electrochemical State Estimation for Li-Ion Batteries. Algorithms 2023, 16, 73. https://doi.org/10.3390/a16020073
Moreno H, Schaum A. Low-Order Electrochemical State Estimation for Li-Ion Batteries. Algorithms. 2023; 16(2):73. https://doi.org/10.3390/a16020073
Chicago/Turabian StyleMoreno, Higuatzi, and Alexander Schaum. 2023. "Low-Order Electrochemical State Estimation for Li-Ion Batteries" Algorithms 16, no. 2: 73. https://doi.org/10.3390/a16020073