
Clustering Algorithm with a Greedy Agglomerative Heuristic and Special Distance Measures


Abstract
:1. Introduction
2. Kohonen Neural Networks for Clustering Problem
2.1. Distance Measures
2.2. Vector Quantization Networks and Self-Organizing Kohonen Maps
- Vector quantization networks (VQ), closely related to k-means method;
- Self-organizing Kohonen maps (SOM), which provide a “topological” mapping from the input space to the clusters. Neurons in SOMs are organized into a grid (usually two-dimensional);
- Learning vector quantization networks (LVQ), which include supervised learning and used for classification problems.
| Algorithm 1. Basic SCL algorithm |
| Required: Set of initial data vectors X1, …, XN, where N is the number of points; set the number of neurons K; η0 (η = η0), where η0 is the initial learning rate; set the step of changing the learning rate Δη; |
| 1. Set the weight of each neuron Wj () |
| 2. While η > 0: |
| 3. for do |
| 4. for do |
| 5. Find the closest neuron Wcl to Xi: |
| 6. Update the closest neuron: Wcl = Wcl + η⋅(Xi − Wcl) |
| 7. η = η − Δη |
| Algorithm 2. Basic SOM algorithm |
| Required: Set of initial data X1, …, XN, where N is the number of points; set the number of neurons K; η0 (η = η0), where η0 is the initial learning rate. |
| 1. Set the weight of each neuron Wj () |
| 2. t = 0 |
| 3. While maximum time is not exceeded: t ≤ Tmax: |
| 4. Randomly choose Xi from initial data X1, …, XN. |
| 5. Find the closest neuron Wcl to Xi: |
| 6. Update the closest neuron Wcl and its neighbors V(Wcl). |
| Here, V(Wcl) is the set of indexes in the neighborhood of Wcl, including Wcl: |
| For each p in V(Wcl): |
| Wp = Wp + η(t) · h(t,d (Wp,Wcl)) · (Xi − Wp), |
| where η(t) is learning rate, h(t,d (Wp,Wcl)) is neighborhood function. |
| 7. t = t + 1 |
| 8. End while |
2.3. Proposed Algorithms
| Algorithm 3. SCL-based algorithm with a greedy agglomerative heuristic (SCL-GREEDY) |
| Required: Set of initial data X1, …, XN, where N is the number of points; set the number of neurons K1; η0 (η = η0), where η0 is the initial learning rate; set the step of changing the learning rate Δη |
| 1. Increase the number of neurons k times K = K · K1 |
| 2. Set the weight of each neuron Wj () |
| 3. Determine the number of steps to calculate η: SN = trunc(N/K), jj = 1 |
| 4. While η > 0: |
| 5. For , do |
| 6. For , do |
| 7. Find the closest neuron Wcl to Xi: |
| 8. Update the closest neuron Wcl: Wcl = Wcl +η·(Xi − Wcl) |
| 9. For each neuron Wj, calculate sum of distances to the initial data |
| X1, …, Xi: |
| 10. IF i%(SN + 1) == 0, THEN Recalculate η: jj = jj + 1, η = η0/jj |
| 11. IF K <> K1, THEN remove neuron Wj with the maximum sum of distances |
| 12. η = η – Δη |
| 13. End while |
| Algorithm 4. SOM-based algorithm with a greedy agglomerative heuristic (SOM-GREEDY) |
| Required: Set of initial data X1, …, XN, where N is the number of points; set the number of neurons K1; η0 (η = η0), where η0 is the initial learning rate. |
| 1. Increase the number of neurons k times K = k · K1 |
| 2. Set the weight of each neuron Wj () |
| 3. t = 0 |
| 4. While maximum time is not exceeded: t ≤ Tmax: |
| 5. Randomly choose Xi from initial data X1, …, XN. |
| 6. Find the closest neuron Wcl to Xi: |
| 7. Update the closest neuron Wcl and its neighbors V(Wcl). |
| Here, V(Wcl) is the set of indexes in the neighborhood of Wcl, including Wcl: |
| For each p in V(Wcl): |
| Wp = Wp + η(t) · h(t,d (Wp,Wcl)) · (Xi − Wp), |
| where η(t) is learning rate, h(t,d (Wp,Wcl)) is neighborhood function. |
| 8. For each neuron Wj, calculate sum of distances to the initial data X1, …, Xi: |
| 9. IF K <> K1, THEN remove neuron Wj with the maximum sum of distances |
| 10. η = η − Δη |
| 11. t = t + 1 |
| 12. End while |
3. Computational Experiment and Analysis
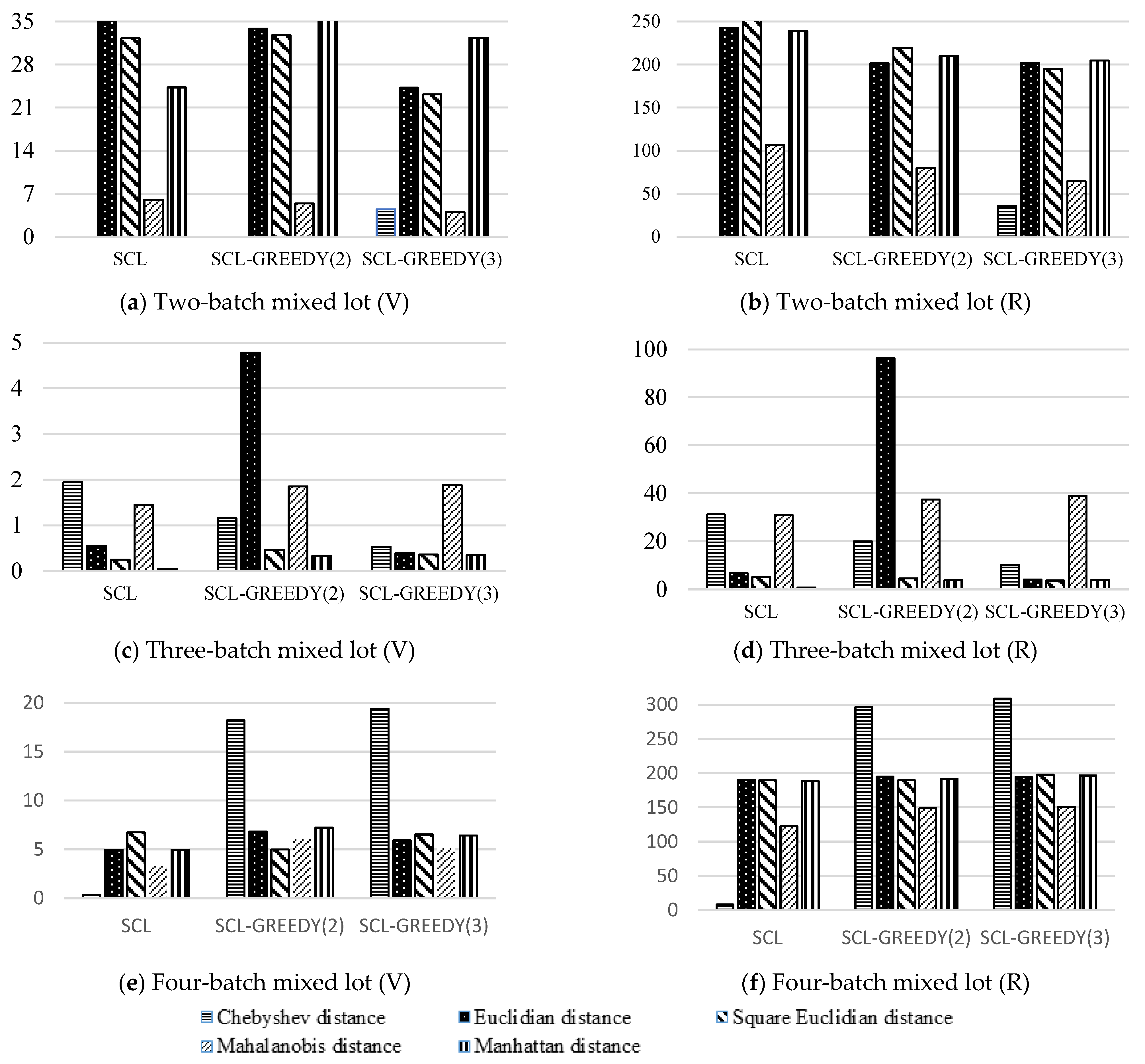
3.1. Experiments in Online Mode
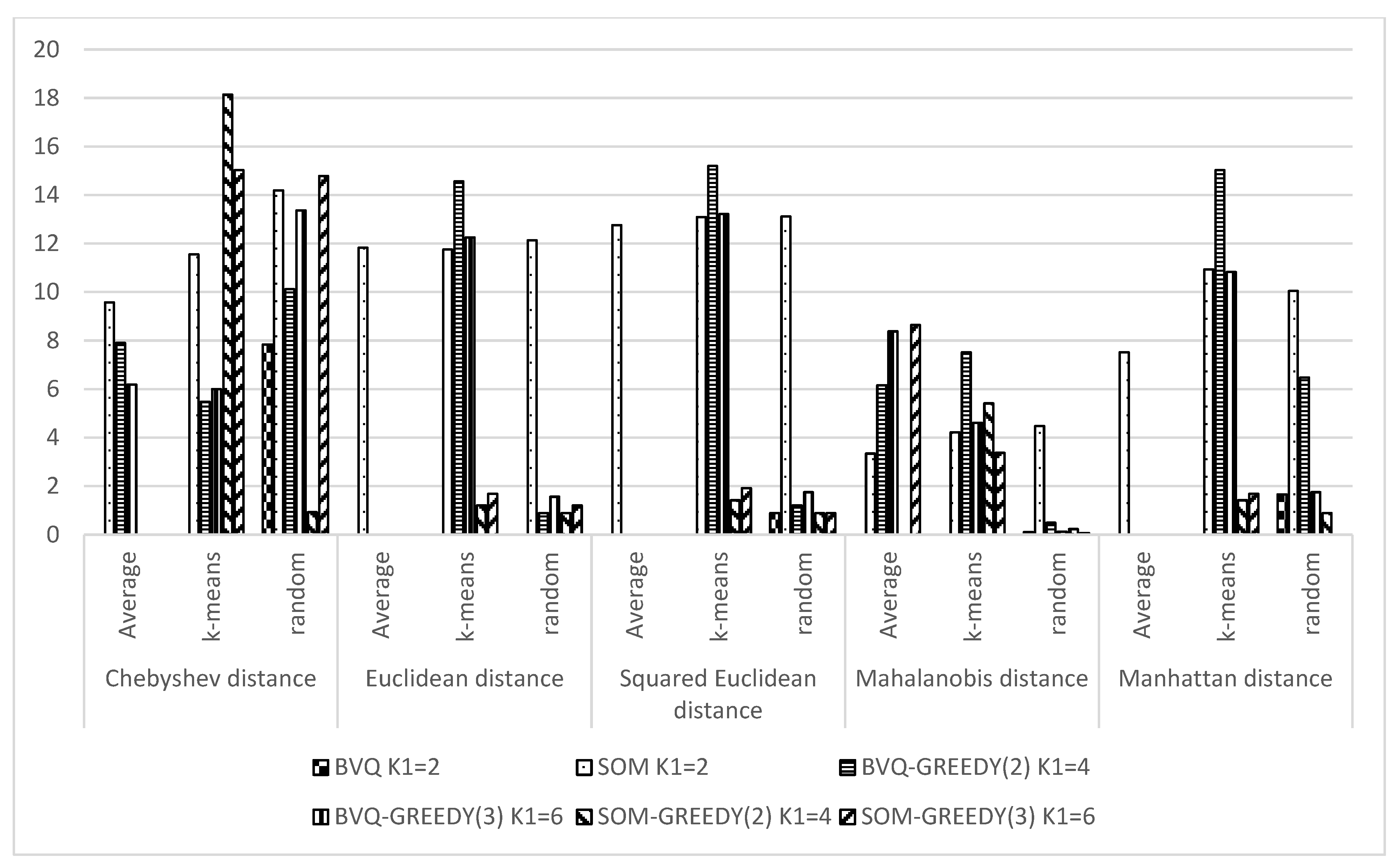
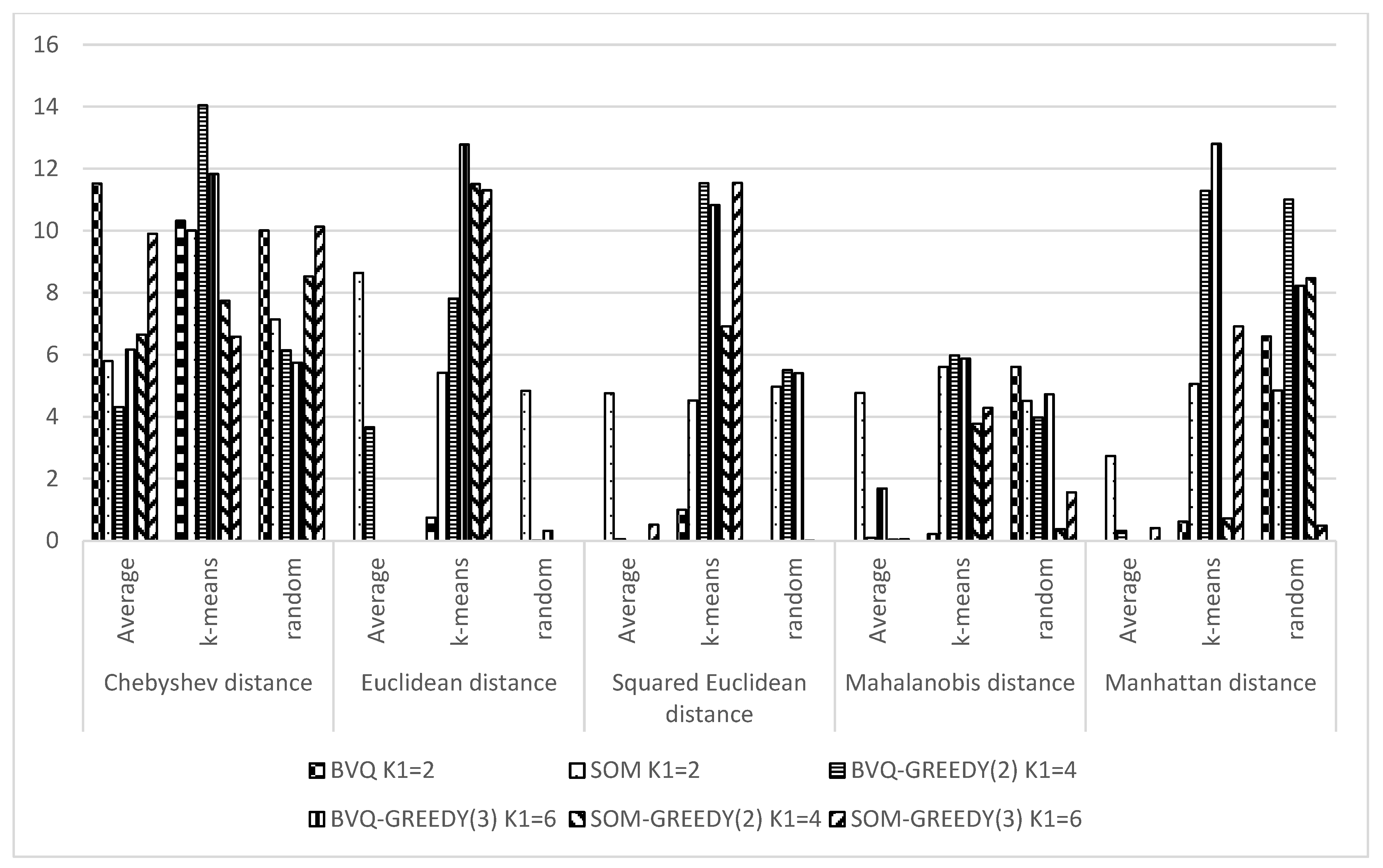
3.2. Experiments in Batch Mode
4. Discussion
5. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
Appendix A

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameter | BVQ | SOM | BVQ- GREEDY(2) | BVQ- GREEDY(3) | SOM- GREEDY(2) | SOM- GREEDY(3) |
|---|---|---|---|---|---|---|
| Two-batch mixed lot | ||||||
| K1 = 2 | K1 = 4 | K1 = 6 | K1 = 4 | K1 = 6 | ||
| Min | 207.903 | 194.919 | 204.323 | 204.113 | 205.657 | 206.582 |
| Max | 207.903 | 217.269 | 204.323 | 216.201 | 205.657 | 249.768 |
| Mean | 207.903 | 203.274 | 204.323 | 205.577 | 205.657 | 222.260 |
| σ | 0.000 | 10.011 | 0.000 | 3.144 | 0.000 | 20.395 |
| V | 0.000 | 4.925 | 0.000 | 1.529 | 0.000 | 9.176 |
| R | 0.000 | 22.351 | 0.000 | 12.088 | 0.000 | 43.187 |
| Three-batch mixed lot | ||||||
| K1 = 3 | K1 = 6 | K1 = 9 | K1 = 6 | K1 = 9 | ||
| Min | 342.987 | 252.824 | 294.450 | 303.473 | 258.930 | 254.905 |
| Max | 342.987 | 353.693 | 342.987 | 345.475 | 258.930 | 254.905 |
| Mean | 342.987 | 334.532 | 317.101 | 331.474 | 258.930 | 254.905 |
| σ | 0.000 | 32.018 | 25.064 | 20.495 | 0.000 | 0.000 |
| V | 0.000 | 9.571 | 7.904 | 6.183 | 0.000 | 0.000 |
| R | 0.000 | 100.869 | 48.537 | 42.001 | 0.000 | 0.000 |
| Four-batch mixed lot | ||||||
| K1 = 4 | K1 = 8 | K1 = 12 | K1 = 8 | K1 = 12 | ||
| Min | 553.715 | 493.863 | 493.936 | 493.368 | 553.548 | 559.033 |
| Max | 701.325 | 578.828 | 563.388 | 561.249 | 705.364 | 701.241 |
| Mean | 613.034 | 523.175 | 548.875 | 528.842 | 576.858 | 616.482 |
| σ | 70.632 | 30.295 | 23.659 | 32.589 | 38.347 | 61.034 |
| V | 11.522 | 5.791 | 4.311 | 6.162 | 6.647 | 9.900 |
| R | 147.610 | 84.965 | 69.452 | 67.881 | 151.816 | 142.208 |
| Parameter | BVQ | SOM | BVQ- GREEDY(2) | BVQ- GREEDY(3) | SOM- GREEDY(2) | SOM- GREEDY(3) |
|---|---|---|---|---|---|---|
| Two-batch mixed lot | ||||||
| K1 = 2 | K1 = 4 | K1 = 6 | K1 = 4 | K1 = 6 | ||
| Min | 207.903 | 195.429 | 204.323 | 204.113 | 205.657 | 216.201 |
| Max | 207.903 | 217.037 | 335.401 | 337.849 | 335.401 | 337.849 |
| Mean | 207.903 | 204.757 | 230.805 | 320.018 | 270.697 | 307.738 |
| σ | 0.000 | 9.869 | 54.136 | 47.057 | 44.573 | 43.024 |
| V | 0.000 | 4.820 | 23.455 | 14.705 | 16.466 | 13.981 |
| R | 0.000 | 21.608 | 131.079 | 133.737 | 129.744 | 121.648 |
| Three-batch mixed lot | ||||||
| K1 = 3 | K1 = 6 | K1 = 9 | K1 = 6 | K1 = 9 | ||
| Min | 258.930 | 252.467 | 294.450 | 303.473 | 258.930 | 254.905 |
| Max | 258.930 | 347.462 | 366.993 | 365.509 | 366.993 | 366.993 |
| Mean | 258.930 | 328.184 | 349.165 | 351.103 | 302.155 | 335.717 |
| σ | 0.000 | 37.900 | 19.111 | 21.056 | 54.798 | 50.449 |
| V | 0.000 | 11.548 | 5.473 | 5.997 | 18.136 | 15.027 |
| R | 0.000 | 94.995 | 72.543 | 62.036 | 108.063 | 112.088 |
| Four-batch mixed lot | ||||||
| K1 = 4 | K1 = 8 | K1 = 12 | K1 = 8 | K1 = 12 | ||
| Min | 554.632 | 495.630 | 493.396 | 566.491 | 555.149 | 692.980 |
| Max | 703.198 | 664.941 | 719.547 | 719.547 | 732.274 | 878.714 |
| Mean | 648.439 | 557.872 | 589.796 | 625.305 | 690.896 | 721.950 |
| σ | 66.907 | 55.821 | 82.804 | 73.941 | 53.478 | 47.524 |
| V | 10.318 | 10.006 | 14.039 | 11.825 | 7.740 | 6.583 |
| R | 148.566 | 169.311 | 226.151 | 153.056 | 177.125 | 185.735 |
| Para- meter | BVQ | SOM | BVQ- GREEDY(2) | BVQ- GREEDY(3) | SOM- GREEDY(2) | SOM- GREEDY(3) |
|---|---|---|---|---|---|---|
| Two-batch mixed lot | ||||||
| K1 = 2 | K1 = 4 | K1 = 6 | K1 = 4 | K1 = 6 | ||
| Min | 207.903 | 195.096 | 204.323 | 204.113 | 205.657 | 206.582 |
| Max | 207.903 | 218.493 | 214.846 | 216.201 | 251.462 | 249.768 |
| Mean | 207.903 | 206.037 | 205.904 | 209.754 | 225.213 | 230.583 |
| σ | 0.000 | 10.063 | 3.660 | 6.242 | 19.539 | 18.841 |
| V | 0.000 | 4.884 | 1.778 | 2.976 | 8.676 | 8.171 |
| R | 0.000 | 23.396 | 10.523 | 12.088 | 45.805 | 43.187 |
| Three-batch mixed lot | ||||||
| K1 = 3 | K1 = 6 | K1 = 9 | K1 = 6 | K1 = 9 | ||
| Min | 258.930 | 252.251 | 258.930 | 254.905 | 357.439 | 254.905 |
| Max | 366.993 | 347.509 | 366.993 | 364.023 | 366.993 | 364.023 |
| Mean | 357.453 | 315.496 | 348.951 | 336.351 | 365.296 | 333.542 |
| σ | 28.002 | 44.784 | 35.296 | 44.964 | 3.362 | 49.308 |
| V | 7.834 | 14.195 | 10.115 | 13.368 | 0.920 | 14.783 |
| R | 108.063 | 95.259 | 108.063 | 109.118 | 9.554 | 109.118 |
| Four-batch mixed lot | ||||||
| K1 = 4 | K1 = 8 | K1 = 12 | K1 = 8 | K1 = 12 | ||
| Min | 552.568 | 497.795 | 493.396 | 493.368 | 556.048 | 552.696 |
| Max | 698.601 | 620.549 | 561.092 | 561.078 | 705.538 | 702.573 |
| Mean | 601.527 | 533.155 | 531.922 | 513.349 | 583.717 | 614.007 |
| σ | 60.196 | 38.032 | 32.671 | 29.471 | 49.765 | 62.183 |
| V | 10.007 | 7.133 | 6.142 | 5.741 | 8.525 | 10.127 |
| R | 146.033 | 122.754 | 67.696 | 67.710 | 149.490 | 149.877 |
| Parameter | BVQ | SOM | BVQ- GREEDY(2) | BVQ- GREEDY(3) | SOM- GREEDY(2) | SOM- GREEDY(3) |
|---|---|---|---|---|---|---|
| Two-batch mixed lot | ||||||
| K1 = 2 | K1 = 4 | K1 = 6 | K1 = 4 | K1 = 6 | ||
| Min | 186.160 | 185.969 | 186.346 | 186.372 | 186.346 | 186.372 |
| Max | 186.160 | 186.207 | 186.346 | 186.372 | 186.346 | 186.372 |
| Mean | 186.160 | 186.087 | 186.346 | 186.372 | 186.346 | 186.372 |
| σ | 0.000 | 0.061 | 0.000 | 0.000 | 0.000 | 0.000 |
| V | 0.000 | 0.033 | 0.000 | 0.000 | 0.000 | 0.000 |
| R | 0.000 | 0.237 | 0.000 | 0.000 | 0.000 | 0.000 |
| Three-batch mixed lot | ||||||
| K1 = 3 | K1 = 6 | K1 = 9 | K1 = 6 | K1 = 9 | ||
| Min | 314.924 | 241.647 | 241.731 | 241.795 | 314.924 | 310.298 |
| Max | 314.924 | 315.304 | 241.731 | 241.795 | 314.924 | 310.298 |
| Mean | 314.924 | 258.499 | 241.731 | 241.795 | 314.924 | 310.298 |
| σ | 0.000 | 30.571 | 0.000 | 0.000 | 0.000 | 0.000 |
| V | 0.000 | 11.826 | 0.000 | 0.000 | 0.000 | 0.000 |
| R | 0.000 | 73.657 | 0.000 | 0.000 | 0.000 | 0.000 |
| Four-batch mixed lot | ||||||
| K1 = 4 | K1 = 8 | K1 = 12 | K1 = 8 | K1 = 12 | ||
| Min | 546.596 | 492.597 | 492.933 | 492.903 | 552.883 | 548.802 |
| Max | 546.596 | 655.370 | 549.751 | 492.903 | 552.883 | 548.804 |
| Mean | 546.596 | 521.356 | 541.720 | 492.903 | 552.883 | 548.803 |
| σ | 0.000 | 45.038 | 19.809 | 0.000 | 0.000 | 0.001 |
| V | 0.000 | 8.639 | 3.657 | 0.000 | 0.000 | 0.000 |
| R | 0.000 | 162.772 | 56.818 | 0.000 | 0.000 | 0.001 |
| Parameter | BVQ | SOM | BVQ- GREEDY(2) | BVQ- GREEDY(3) | SOM- GREEDY(2) | SOM- GREEDY(3) |
|---|---|---|---|---|---|---|
| Two-batch mixed lot | ||||||
| K1 = 2 | K1 = 4 | K1 = 6 | K1 = 4 | K1 = 6 | ||
| Min | 186.160 | 186.007 | 186.346 | 186.372 | 186.346 | 186.372 |
| Max | 186.160 | 186.235 | 335.401 | 337.849 | 335.401 | 337.849 |
| Mean | 186.160 | 186.105 | 216.157 | 297.455 | 236.031 | 317.652 |
| σ | 0.000 | 0.061 | 61.715 | 69.337 | 72.732 | 53.300 |
| V | 0.000 | 0.033 | 28.551 | 23.310 | 30.814 | 16.779 |
| R | 0.000 | 0.227 | 149.055 | 151.477 | 149.055 | 151.477 |
| Three-batch mixed lot | ||||||
| K1 = 3 | K1 = 6 | K1 = 9 | K1 = 6 | K1 = 9 | ||
| Min | 314.924 | 241.768 | 241.731 | 241.795 | 314.924 | 310.298 |
| Max | 314.924 | 312.783 | 325.737 | 325.737 | 325.737 | 323.263 |
| Mean | 314.924 | 258.406 | 264.133 | 300.787 | 316.366 | 318.737 |
| σ | 0.000 | 30.364 | 38.453 | 36.848 | 3.805 | 5.357 |
| V | 0.000 | 11.751 | 14.558 | 12.250 | 1.203 | 1.681 |
| R | 0.000 | 71.015 | 84.006 | 83.943 | 10.813 | 12.965 |
| Four-batch mixed lot | ||||||
| K1 = 4 | K1 = 8 | K1 = 12 | K1 = 8 | K1 = 12 | ||
| Min | 546.596 | 492.696 | 492.933 | 492.903 | 552.883 | 561.003 |
| Max | 559.778 | 554.321 | 711.945 | 704.490 | 711.945 | 711.945 |
| Mean | 548.117 | 523.082 | 565.934 | 613.940 | 599.916 | 647.609 |
| σ | 4.069 | 28.343 | 44.202 | 78.438 | 69.019 | 73.181 |
| V | 0.742 | 5.418 | 7.811 | 12.776 | 11.505 | 11.300 |
| R | 13.182 | 61.624 | 219.011 | 211.587 | 159.062 | 150.942 |
| Para- meter | BVQ | SOM | BVQ- GREEDY(2) | BVQ- GREEDY(3) | SOM- GREEDY(2) | SOM- GREEDY(3) |
|---|---|---|---|---|---|---|
| Two-batch mixed lot | ||||||
| K1 = 2 | K1 = 4 | K1 = 6 | K1 = 4 | K1 = 6 | ||
| Min | 186.160 | 185.954 | 186.346 | 186.372 | 186.346 | 186.372 |
| Max | 186.160 | 186.211 | 186.346 | 186.372 | 186.346 | 186.372 |
| Mean | 186.160 | 186.100 | 186.346 | 186.372 | 186.346 | 186.372 |
| σ | 0.000 | 0.062 | 0.000 | 0.000 | 0.000 | 0.000 |
| V | 0.000 | 0.033 | 0.000 | 0.000 | 0.000 | 0.000 |
| R | 0.000 | 0.258 | 0.000 | 0.000 | 0.000 | 0.000 |
| Three-batch mixed lot | ||||||
| K1 = 3 | K1 = 6 | K1 = 9 | K1 = 6 | K1 = 9 | ||
| Min | 314.924 | 241.634 | 314.924 | 310.298 | 314.924 | 310.298 |
| Max | 314.924 | 312.797 | 325.737 | 320.973 | 325.737 | 320.973 |
| Mean | 314.924 | 260.991 | 315.645 | 313.145 | 315.645 | 311.722 |
| σ | 0.000 | 31.661 | 2.792 | 4.886 | 2.792 | 3.756 |
| V | 0.000 | 12.131 | 0.885 | 1.560 | 0.885 | 1.205 |
| R | 0.000 | 71.163 | 10.813 | 10.675 | 10.813 | 10.675 |
| Four-batch mixed lot | ||||||
| K1 = 4 | K1 = 8 | K1 = 12 | K1 = 8 | K1 = 12 | ||
| Min | 703.485 | 492.661 | 711.930 | 699.061 | 711.945 | 707.793 |
| Max | 703.485 | 550.607 | 711.945 | 707.793 | 711.945 | 707.793 |
| Mean | 703.485 | 528.546 | 711.944 | 707.096 | 711.945 | 707.793 |
| σ | 0.000 | 25.546 | 0.004 | 2.242 | 0.000 | 0.000 |
| V | 0.000 | 4.833 | 0.001 | 0.317 | 0.000 | 0.000 |
| R | 0.000 | 57.946 | 0.015 | 8.732 | 0.000 | 0.000 |
| Parameter | BVQ | SOM | BVQ- GREEDY(2) | BVQ- GREEDY(3) | SOM- GREEDY(2) | SOM- GREEDY(3) |
|---|---|---|---|---|---|---|
| Two-batch mixed lot | ||||||
| K1 = 2 | K1 = 4 | K1 = 6 | K1 = 4 | K1 = 6 | ||
| Min | 186.160 | 185.962 | 186.346 | 186.372 | 186.346 | 186.372 |
| Max | 186.160 | 186.233 | 186.346 | 186.372 | 186.346 | 186.372 |
| Mean | 186.160 | 186.092 | 186.346 | 186.372 | 186.346 | 186.372 |
| σ | 0.000 | 0.070 | 0.000 | 0.000 | 0.000 | 0.000 |
| V | 0.000 | 0.038 | 0.000 | 0.000 | 0.000 | 0.000 |
| R | 0.000 | 0.271 | 0.000 | 0.000 | 0.000 | 0.000 |
| Three-batch mixed lot | ||||||
| K1 = 3 | K1 = 6 | K1 = 9 | K1 = 6 | K1 = 9 | ||
| Min | 314.924 | 241.673 | 241.731 | 241.795 | 314.924 | 310.298 |
| Max | 314.924 | 312.911 | 241.731 | 241.795 | 314.924 | 310.298 |
| Mean | 314.924 | 265.496 | 241.731 | 241.795 | 314.924 | 310.298 |
| σ | 0.000 | 33.876 | 0.000 | 0.000 | 0.000 | 0.000 |
| V | 0.000 | 12.759 | 0.000 | 0.000 | 0.000 | 0.000 |
| R | 0.000 | 71.238 | 0.000 | 0.000 | 0.000 | 0.000 |
| Four-batch mixed lot | ||||||
| K1 = 4 | K1 = 8 | K1 = 12 | K1 = 8 | K1 = 12 | ||
| Min | 546.596 | 492.541 | 549.130 | 492.903 | 552.883 | 548.802 |
| Max | 546.596 | 544.710 | 549.751 | 492.903 | 552.883 | 559.135 |
| Mean | 546.596 | 509.981 | 549.586 | 492.903 | 552.883 | 550.164 |
| σ | 0.000 | 24.249 | 0.284 | 0.000 | 0.000 | 2.840 |
| V | 0.000 | 4.755 | 0.052 | 0.000 | 0.000 | 0.516 |
| R | 0.000 | 52.169 | 0.621 | 0.000 | 0.000 | 10.333 |
| Parameter | BVQ | SOM | BVQ- GREEDY(2) | BVQ- GREEDY(3) | SOM- GREEDY(2) | SOM- GREEDY(3) |
|---|---|---|---|---|---|---|
| Two-batch mixed lot | ||||||
| K1 = 2 | K1 = 4 | K1 = 6 | K1 = 4 | K1 = 6 | ||
| Min | 186.160 | 186.010 | 186.346 | 186.372 | 186.346 | 186.372 |
| Max | 186.160 | 186.200 | 335.401 | 337.849 | 335.401 | 337.849 |
| Mean | 186.160 | 186.113 | 236.031 | 297.455 | 226.094 | 317.652 |
| σ | 0.000 | 0.050 | 72.732 | 69.337 | 68.228 | 53.300 |
| V | 0.000 | 0.027 | 30.814 | 23.310 | 30.177 | 16.779 |
| R | 0.000 | 0.189 | 149.055 | 151.477 | 149.055 | 151.477 |
| Three-batch mixed lot | ||||||
| K1 = 3 | K1 = 6 | K1 = 9 | K1 = 6 | K1 = 9 | ||
| Min | 314.924 | 241.634 | 241.731 | 241.795 | 314.924 | 310.298 |
| Max | 314.924 | 315.223 | 325.737 | 323.263 | 325.737 | 325.737 |
| Mean | 314.924 | 275.027 | 269.733 | 295.038 | 317.087 | 317.326 |
| σ | 0.000 | 35.995 | 40.991 | 38.981 | 4.477 | 6.079 |
| V | 0.000 | 13.088 | 15.197 | 13.212 | 1.412 | 1.916 |
| R | 0.000 | 73.589 | 84.006 | 81.468 | 10.813 | 15.439 |
| Four-batch mixed lot | ||||||
| K1 = 4 | K1 = 8 | K1 = 12 | K1 = 8 | K1 = 12 | ||
| Min | 546.596 | 492.561 | 492.933 | 560.904 | 552.883 | 560.904 |
| Max | 559.778 | 555.250 | 711.945 | 711.945 | 711.945 | 711.945 |
| Mean | 549.233 | 530.534 | 585.963 | 658.380 | 570.195 | 636.706 |
| σ | 5.458 | 24.015 | 67.564 | 71.294 | 39.403 | 73.474 |
| V | 0.994 | 4.527 | 11.530 | 10.829 | 6.911 | 11.540 |
| R | 13.182 | 62.688 | 219.011 | 151.041 | 159.062 | 151.041 |
| Para- meter | BVQ | SOM | BVQ- GREEDY(2) | BVQ- GREEDY(3) | SOM- GREEDY(2) | SOM- GREEDY(3) |
|---|---|---|---|---|---|---|
| Two-batch mixed lot | ||||||
| K1 = 2 | K1 = 4 | K1 = 6 | K1 = 4 | K1 = 6 | ||
| Min | 186.160 | 185.969 | 186.346 | 186.372 | 186.346 | 186.372 |
| Max | 186.160 | 186.183 | 186.346 | 186.372 | 186.346 | 186.372 |
| Mean | 186.160 | 186.088 | 186.346 | 186.372 | 186.346 | 186.372 |
| σ | 0.000 | 0.048 | 0.000 | 0.000 | 0.000 | 0.000 |
| V | 0.000 | 0.026 | 0.000 | 0.000 | 0.000 | 0.000 |
| R | 0.000 | 0.214 | 0.000 | 0.000 | 0.000 | 0.000 |
| Three-batch mixed lot | ||||||
| K1 = 3 | K1 = 6 | K1 = 9 | K1 = 6 | K1 = 9 | ||
| Min | 314.924 | 241.651 | 314.924 | 310.298 | 314.924 | 310.298 |
| Max | 325.737 | 315.550 | 325.737 | 320.973 | 325.737 | 320.973 |
| Mean | 315.645 | 272.613 | 316.366 | 315.280 | 315.645 | 311.010 |
| σ | 2.792 | 35.746 | 3.805 | 5.513 | 2.792 | 2.756 |
| V | 0.885 | 13.112 | 1.203 | 1.748 | 0.885 | 0.886 |
| R | 10.813 | 73.899 | 10.813 | 10.675 | 10.813 | 10.675 |
| Four-batch mixed lot | ||||||
| K1 = 4 | K1 = 8 | K1 = 12 | K1 = 8 | K1 = 12 | ||
| Min | 703.485 | 492.663 | 562.352 | 561.616 | 711.909 | 707.793 |
| Max | 703.485 | 550.840 | 711.945 | 707.793 | 711.945 | 707.793 |
| Mean | 703.485 | 523.502 | 701.972 | 697.952 | 711.942 | 707.793 |
| σ | 0.000 | 26.008 | 38.625 | 37.718 | 0.009 | 0.000 |
| V | 0.000 | 4.968 | 5.502 | 5.404 | 0.001 | 0.000 |
| R | 0.000 | 58.177 | 149.592 | 146.177 | 0.035 | 0.000 |
| Parameter | BVQ | SOM | BVQ- GREEDY(2) | BVQ- GREEDY(3) | SOM- GREEDY(2) | SOM- GREEDY(3) |
|---|---|---|---|---|---|---|
| Two-batch mixed lot | ||||||
| K1 = 2 | K1 = 4 | K1 = 6 | K1 = 4 | K1 = 6 | ||
| Min | 201.387 | 194.572 | 205.657 | 206.582 | 205.657 | 206.582 |
| Max | 201.387 | 197.145 | 205.657 | 206.582 | 205.657 | 206.582 |
| Mean | 201.387 | 195.929 | 205.657 | 206.582 | 205.657 | 206.582 |
| σ | 0.000 | 0.568 | 0.000 | 0.000 | 0.000 | 0.000 |
| V | 0.000 | 0.290 | 0.000 | 0.000 | 0.000 | 0.000 |
| R | 0.000 | 2.573 | 0.000 | 0.000 | 0.000 | 0.000 |
| Three-batch mixed lot | ||||||
| K1 = 3 | K1 = 6 | K1 = 9 | K1 = 6 | K1 = 9 | ||
| Min | 326.463 | 312.110 | 287.148 | 288.169 | 326.463 | 288.169 |
| Max | 326.463 | 361.353 | 348.315 | 350.407 | 326.463 | 350.407 |
| Mean | 326.463 | 342.690 | 295.317 | 332.825 | 326.463 | 325.676 |
| σ | 0.000 | 11.448 | 18.173 | 27.895 | 0.000 | 28.141 |
| V | 0.000 | 3.341 | 6.154 | 8.381 | 0.000 | 8.641 |
| R | 0.000 | 49.242 | 61.168 | 62.238 | 0.000 | 62.238 |
| Four-batch mixed lot | ||||||
| K1 = 4 | K1 = 8 | K1 = 12 | K1 = 8 | K1 = 12 | ||
| Min | 758.068 | 572.730 | 728.875 | 696.210 | 757.097 | 756.752 |
| Max | 758.068 | 663.835 | 730.771 | 722.998 | 757.734 | 757.838 |
| Mean | 758.068 | 619.269 | 730.508 | 709.527 | 757.375 | 757.390 |
| σ | 0.000 | 29.509 | 0.663 | 11.950 | 0.269 | 0.344 |
| V | 0.000 | 4.765 | 0.091 | 1.684 | 0.036 | 0.045 |
| R | 0.000 | 91.104 | 1.896 | 26.788 | 0.638 | 1.086 |
| Parameter | BVQ | SOM | BVQ- GREEDY(2) | BVQ- GREEDY(3) | SOM- GREEDY(2) | SOM- GREEDY(3) |
|---|---|---|---|---|---|---|
| Two-batch mixed lot | ||||||
| K1 = 2 | K1 = 4 | K1 = 6 | K1 = 4 | K1 = 6 | ||
| Min | 201.387 | 194.573 | 205.657 | 206.582 | 205.657 | 206.582 |
| Max | 201.387 | 197.148 | 335.401 | 337.849 | 335.401 | 337.849 |
| Mean | 201.387 | 195.931 | 222.956 | 311.596 | 231.606 | 294.093 |
| σ | 0.000 | 0.680 | 45.653 | 54.350 | 53.719 | 64.052 |
| V | 0.000 | 0.347 | 20.476 | 17.442 | 23.194 | 21.779 |
| R | 0.000 | 2.575 | 129.744 | 131.268 | 129.744 | 131.268 |
| Three-batch mixed lot | ||||||
| K1 = 3 | K1 = 6 | K1 = 9 | K1 = 6 | K1 = 9 | ||
| Min | 348.315 | 291.064 | 287.148 | 317.121 | 326.463 | 335.463 |
| Max | 348.315 | 361.323 | 366.993 | 366.993 | 366.993 | 365.509 |
| Mean | 348.315 | 340.856 | 347.631 | 353.627 | 337.082 | 358.806 |
| σ | 0.000 | 14.370 | 26.144 | 16.298 | 18.241 | 12.100 |
| V | 0.000 | 4.216 | 7.521 | 4.609 | 5.411 | 3.372 |
| R | 0.000 | 70.258 | 79.846 | 49.872 | 40.531 | 30.046 |
| Four-batch mixed lot | ||||||
| K1 = 4 | K1 = 8 | K1 = 12 | K1 = 8 | K1 = 12 | ||
| Min | 758.068 | 554.372 | 725.168 | 701.832 | 757.148 | 763.684 |
| Max | 764.357 | 677.513 | 852.818 | 892.642 | 845.107 | 836.489 |
| Mean | 758.487 | 613.179 | 765.066 | 741.820 | 773.655 | 800.642 |
| σ | 1.624 | 34.378 | 45.733 | 43.564 | 29.147 | 34.313 |
| V | 0.214 | 5.607 | 5.978 | 5.873 | 3.768 | 4.286 |
| R | 6.289 | 123.141 | 127.650 | 190.810 | 87.959 | 72.805 |
| Para- meter | BVQ | SOM | BVQ- GREEDY(2) | BVQ- GREEDY(3) | SOM- GREEDY(2) | SOM- GREEDY(3) |
|---|---|---|---|---|---|---|
| Two-batch mixed lot | ||||||
| K1 = 2 | K1 = 4 | K1 = 6 | K1 = 4 | K1 = 6 | ||
| Min | 331.089 | 194.303 | 205.657 | 206.582 | 335.258 | 337.849 |
| Max | 331.107 | 196.693 | 335.401 | 337.849 | 335.401 | 337.849 |
| Mean | 331.106 | 195.717 | 326.716 | 320.358 | 335.387 | 337.849 |
| σ | 0.005 | 0.503 | 33.490 | 46.116 | 0.038 | 0.000 |
| V | 0.001 | 0.257 | 10.251 | 14.395 | 0.011 | 0.000 |
| R | 0.018 | 2.390 | 129.744 | 131.268 | 0.143 | 0.000 |
| Three-batch mixed lot | ||||||
| K1 = 3 | K1 = 6 | K1 = 9 | K1 = 6 | K1 = 9 | ||
| Min | 443.219 | 305.398 | 437.281 | 437.742 | 440.640 | 438.611 |
| Max | 444.607 | 361.336 | 444.378 | 439.538 | 444.607 | 439.598 |
| Mean | 444.133 | 338.766 | 442.954 | 438.906 | 444.084 | 439.413 |
| σ | 0.479 | 15.177 | 2.163 | 0.540 | 1.011 | 0.275 |
| V | 0.108 | 4.480 | 0.488 | 0.123 | 0.228 | 0.063 |
| R | 1.388 | 55.937 | 7.097 | 1.795 | 3.967 | 0.987 |
| Four-batch mixed lot | ||||||
| K1 = 4 | K1 = 8 | K1 = 12 | K1 = 8 | K1 = 12 | ||
| Min | 764.357 | 564.890 | 764.433 | 771.053 | 839.280 | 838.055 |
| Max | 856.541 | 673.446 | 836.222 | 866.897 | 851.622 | 874.529 |
| Mean | 818.674 | 614.438 | 787.136 | 790.511 | 845.713 | 854.250 |
| σ | 45.914 | 27.721 | 31.284 | 37.296 | 3.154 | 13.329 |
| V | 5.608 | 4.512 | 3.974 | 4.718 | 0.373 | 1.560 |
| R | 92.185 | 108.556 | 71.789 | 95.844 | 12.342 | 36.475 |
| Parameter | BVQ | SOM | BVQ- GREEDY(2) | BVQ- GREEDY(3) | SOM- GREEDY(2) | SOM- GREEDY(3) |
|---|---|---|---|---|---|---|
| Two-batch mixed lot | ||||||
| K1 = 2 | K1 = 4 | K1 = 6 | K1 = 4 | K1 = 6 | ||
| Min | 186.160 | 185.971 | 186.346 | 186.372 | 186.346 | 186.372 |
| Max | 186.160 | 186.184 | 186.346 | 186.372 | 186.346 | 186.372 |
| Mean | 186.160 | 186.068 | 186.346 | 186.372 | 186.346 | 186.372 |
| σ | 0.000 | 0.053 | 0.000 | 0.000 | 0.000 | 0.000 |
| V | 0.000 | 0.028 | 0.000 | 0.000 | 0.000 | 0.000 |
| R | 0.000 | 0.214 | 0.000 | 0.000 | 0.000 | 0.000 |
| Three-batch mixed lot | ||||||
| K1 = 3 | K1 = 6 | K1 = 9 | K1 = 6 | K1 = 9 | ||
| Min | 314.924 | 241.918 | 241.887 | 241.991 | 314.924 | 310.298 |
| Max | 314.924 | 315.391 | 241.887 | 241.991 | 314.924 | 310.298 |
| Mean | 314.924 | 247.062 | 241.887 | 241.991 | 314.924 | 310.298 |
| σ | 0.000 | 18.565 | 0.000 | 0.000 | 0.000 | 0.000 |
| V | 0.000 | 7.514 | 0.000 | 0.000 | 0.000 | 0.000 |
| R | 0.000 | 73.473 | 0.000 | 0.000 | 0.000 | 0.000 |
| Four-batch mixed lot | ||||||
| K1 = 4 | K1 = 8 | K1 = 12 | K1 = 8 | K1 = 12 | ||
| Min | 690.643 | 493.142 | 551.927 | 493.236 | 703.810 | 692.768 |
| Max | 690.643 | 546.207 | 555.852 | 493.236 | 703.810 | 700.558 |
| Mean | 690.643 | 497.063 | 554.659 | 493.236 | 703.810 | 697.752 |
| σ | 0.000 | 13.597 | 1.765 | 0.000 | 0.000 | 2.854 |
| V | 0.000 | 2.735 | 0.318 | 0.000 | 0.000 | 0.409 |
| R | 0.000 | 53.065 | 3.925 | 0.000 | 0.000 | 7.790 |
| Parameter | BVQ | SOM | BVQ- GREEDY(2) | BVQ- GREEDY(3) | SOM- GREEDY(2) | SOM- GREEDY(3) |
|---|---|---|---|---|---|---|
| Two-batch mixed lot | ||||||
| K1 = 2 | K1 = 4 | K1 = 6 | K1 = 4 | K1 = 6 | ||
| Min | 186.160 | 185.934 | 186.346 | 186.372 | 186.346 | 186.372 |
| Max | 186.160 | 186.214 | 335.401 | 337.849 | 335.401 | 337.849 |
| Mean | 186.160 | 186.071 | 226.094 | 297.455 | 236.031 | 266.997 |
| σ | 0.000 | 0.064 | 68.228 | 69.337 | 72.732 | 78.067 |
| V | 0.000 | 0.035 | 30.177 | 23.310 | 30.814 | 29.239 |
| R | 0.000 | 0.281 | 149.055 | 151.477 | 149.055 | 151.477 |
| Three-batch mixed lot | ||||||
| K1 = 3 | K1 = 6 | K1 = 9 | K1 = 6 | K1 = 9 | ||
| Min | 314.924 | 241.851 | 241.887 | 241.991 | 314.924 | 310.298 |
| Max | 314.924 | 315.759 | 325.737 | 325.737 | 325.737 | 323.263 |
| Mean | 314.924 | 254.400 | 269.547 | 305.952 | 317.087 | 317.568 |
| σ | 0.000 | 27.821 | 40.504 | 33.132 | 4.477 | 5.352 |
| V | 0.000 | 10.936 | 15.027 | 10.829 | 1.412 | 1.685 |
| R | 0.000 | 73.908 | 83.850 | 83.746 | 10.813 | 12.965 |
| Four-batch mixed lot | ||||||
| K1 = 4 | K1 = 8 | K1 = 12 | K1 = 8 | K1 = 12 | ||
| Min | 690.643 | 493.044 | 551.927 | 493.236 | 695.985 | 696.331 |
| Max | 700.891 | 555.231 | 706.183 | 705.449 | 711.926 | 892.642 |
| Mean | 692.693 | 508.407 | 645.549 | 633.408 | 705.483 | 714.682 |
| σ | 4.243 | 25.699 | 72.850 | 81.067 | 5.039 | 49.382 |
| V | 0.613 | 5.055 | 11.285 | 12.799 | 0.714 | 6.910 |
| R | 10.247 | 62.187 | 154.257 | 212.213 | 15.941 | 196.311 |
| Para- meter | BVQ | SOM | BVQ- GREEDY(2) | BVQ- GREEDY(3) | SOM- GREEDY(2) | SOM- GREEDY(3) |
|---|---|---|---|---|---|---|
| Two-batch mixed lot | ||||||
| K1 = 2 | K1 = 4 | K1 = 6 | K1 = 4 | K1 = 6 | ||
| Min | 186.160 | 186.004 | 186.346 | 186.372 | 186.346 | 186.372 |
| Max | 186.160 | 186.259 | 186.346 | 186.372 | 186.346 | 186.372 |
| Mean | 186.160 | 186.098 | 186.346 | 186.372 | 186.346 | 186.372 |
| σ | 0.000 | 0.061 | 0.000 | 0.000 | 0.000 | 0.000 |
| V | 0.000 | 0.033 | 0.000 | 0.000 | 0.000 | 0.000 |
| R | 0.000 | 0.255 | 0.000 | 0.000 | 0.000 | 0.000 |
| Three-batch mixed lot | ||||||
| K1 = 3 | K1 = 6 | K1 = 9 | K1 = 6 | K1 = 9 | ||
| Min | 314.924 | 241.891 | 241.887 | 310.298 | 314.924 | 310.298 |
| Max | 325.737 | 315.597 | 325.737 | 320.973 | 325.737 | 310.298 |
| Mean | 318.529 | 251.905 | 312.939 | 315.280 | 315.645 | 310.298 |
| σ | 5.276 | 25.304 | 20.254 | 5.513 | 2.792 | 0.000 |
| V | 1.656 | 10.045 | 6.472 | 1.748 | 0.885 | 0.000 |
| R | 10.813 | 73.706 | 83.850 | 10.675 | 10.813 | 0.000 |
| Four-batch mixed lot | ||||||
| K1 = 4 | K1 = 8 | K1 = 12 | K1 = 8 | K1 = 12 | ||
| Min | 703.264 | 493.211 | 711.715 | 704.380 | 711.772 | 867.281 |
| Max | 885.950 | 549.237 | 891.441 | 882.936 | 891.058 | 884.912 |
| Mean | 715.546 | 510.358 | 779.266 | 730.258 | 850.182 | 882.353 |
| σ | 47.141 | 24.750 | 85.747 | 60.068 | 71.982 | 4.286 |
| V | 6.588 | 4.850 | 11.004 | 8.226 | 8.467 | 0.486 |
| R | 182.686 | 56.026 | 179.727 | 178.556 | 179.286 | 17.632 |
References
- Shirkhorshidi, A.S.; Aghabozorgi, S.; Wah, T. A comparison study on similarity and dissimilarity measures in clustering continuous data. PLoS ONE 2015, 10, e0144059. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Youguo, L.; Haiyan, W. A clustering method based on k-means algorithm. Phys. Procedia 2012, 25, 1104–1109. [Google Scholar]
- Steinhaus, H. Sur la divisiondes corps materiels en parties. Bull. Acad. Polon. Sci. 1956, 4, 801–804. [Google Scholar]
- Weiszfeld, E.; Plastria, F. On the point for which the sum of the distances to n given points is minimum. Ann. Oper. Res. 2009, 167, 7–41. [Google Scholar] [CrossRef]
- Nicholson, T. A sequential method for discrete optimization problems and its application to the assignment, traveling salesman and tree scheduling problems. J. Inst. Math. Appl. 1965, 13, 362–375. [Google Scholar]
- Lloyd, S.P. Least squares quantization in PCM. IEEE Trans. Inf. Theory 1982, 28, 129–137. [Google Scholar] [CrossRef] [Green Version]
- Arthur, D.; Vassilvitskii, S. K-means++: The advantages of careful seeding. In Proceedings of the Eighteenth Annual ACM-SIAM Symposium on Discrete Algorithms, New Orleans, LA, USA, 7–9 January 2007; pp. 1027–1035. [Google Scholar]
- Bradley, P.S.; Fayyad, U.M. Refining initial points for k-means clustering. In Proceedings of the Fifteenth International Conference on Machine Learning (ICML 1998), Madison, WI, USA, 24–27 July 1998; Volume 98, pp. 91–99. [Google Scholar]
- Golasowski, M.; Martinovič, J.; Slaninová, K. Comparison of k-means clustering initialization approaches with brute-force initialization. In Advanced Computing and Systems for Security. Advances in Intelligent Systems and Computing; Springer: Singapore, 2017; Volume 567, pp. 103–114. [Google Scholar]
- Kalczynski, P.; Brimberg, J.; Drezner, Z. Less is more: Simple algorithms for the minimum sum of squares clustering problem. IMA J. Manag. Math. 2021, dpab031. [Google Scholar] [CrossRef]
- Mustafi, D.; Sahoo, G. A hybrid approach using genetic algorithm and the differential evolution heuristic for enhanced initialization of the k-means algorithm with applications in text clustering. Soft Comput. 2019, 23, 6361–6378. [Google Scholar] [CrossRef]
- Jain, A.K. Data clustering: 50 years beyond k-means. Pattern Recogn. Lett. 2010, 31, 651–666. [Google Scholar] [CrossRef]
- Ahmed, M.; Seraj, R.; Islam, S.M.S. The k-means algorithm: A comprehensive survey and performance evaluation. Electronics 2020, 9, 1295. [Google Scholar] [CrossRef]
- Celebi, M.E.; Kingravi, H.A.; Vela, P.A. A comparative study of efficient initialization methods for the k-means clustering algorithm. Expert Syst. Appl. 2013, 40, 200–210. [Google Scholar] [CrossRef] [Green Version]
- Kohonen, T. Self-Organizing Maps; Springer: Berlin/Heidelberg, Germany, 1995. [Google Scholar]
- Kohonen, T.; Somervuo, P. Self-organizing maps of symbol strings with application to speech recognition. In Proceedings of the Workshop on Self-Organizing Maps (WSOM’97), Espoo, Finland, 4–6 June 1997; pp. 2–7. [Google Scholar]
- Świetlicka, I.; Kuniszyk-Jóźkowiak, W.; Świetlicki, M. Artificial neural networks combined with the principal component analysis for non-fluent speech recognition. Sensors 2022, 22, 321. [Google Scholar] [CrossRef] [PubMed]
- Ettaouil, M.; Lazaar, M.; Ghanou, Y. Vector quantization by improved Kohonen algorithm. J. Comput. 2012, 4, 2151–9617. [Google Scholar]
- Younis, K.S.; Rogers, S.K.; DeSimio, M.P. Vector quantization based on dynamic adjustment of Mahalanobis distance. In Proceedings of the IEEE 1996 National Aerospace and Electronics Conference NAECON, Dayton, OH, USA, 20–23 May 1996; Volume 2, pp. 858–862. [Google Scholar] [CrossRef]
- Paul, S.; Gupta, M. Image segmentation by self-organizing map with Mahalanobis distance. Int. J. Emerg. Technol. Adv. Eng. 2013, 3, 2250–2459. [Google Scholar]
- Sun, Y.; Liu, H.; Sun, Q. Online learning on incremental distance metric for person re-identification. In Proceedings of the 2014 IEEE International Conference on Robotics and Biomimetics, Bali, Indonesia, 5 December 2014. [Google Scholar]
- Plonski, P.; Zaremba, K. Improving Performance of self-organising maps with distance metric learning method. In Proceedings of the International Conference on Artificial Intelligence and Soft Computing, Zakopane, Poland, 29 April 29–3 May 2012; Rutkowski, L., Korytkowski, M., Scherer, R., Tadeusiewicz, R., Zadeh, L.A., Zurada, J.M., Eds.; Springer: Berlin/Heidelberg, Germany, 2012; Volume 7267. [Google Scholar] [CrossRef] [Green Version]
- Saleh, A.; Naoyuki, T.; Rin-Ichiro, T. Face recognition under varying illumination using Mahalanobis self-organizing map. Artif. Life Robot. 2008, 13, 298–301. [Google Scholar] [CrossRef]
- Natita, W.; Wiboonsak, W.; Dusadee, S. Appropriate learning rate and neighborhood function of self-organizing map (SOM) for specific humidity pattern classification over Southern Thailand. Int. J. Modeling Optim. 2016, 6, 61–65. [Google Scholar] [CrossRef] [Green Version]
- Mahindru, A.; Sangal, A.L. SOMDROID: Android malware detection by artificial neural network trained using unsupervised learning. Evol. Intel. 2022, 15, 407–437. [Google Scholar] [CrossRef]
- Grinyak, V.M.; Yudin, P.V. Kohonen self-organizing map in seasonal sales planning. In SMART Automatics and Energy. Smart Innovation, Systems and Technologies; Solovev, D.B., Kyriakopoulos, G.L., Venelin, T., Eds.; Springer: Singapore, 2022; Volume 272. [Google Scholar] [CrossRef]
- Wang, Y.; Wang, H.; Li, S.; Wang, L. Survival risk prediction of esophageal cancer based on the Kohonen network clustering algorithm and kernel extreme learning machine. Mathematics 2022, 10, 1367. [Google Scholar] [CrossRef]
- Kiseleva, E.I.; Astachova, I.F. Intelligent support for medical decision making. In Advances in Automation III. RusAutoCon 2021. Lecture Notes in Electrical Engineering; Radionov, A.A., Gasiyarov, V.R., Eds.; Springer: Cham, Switzerland, 2022; Volume 857. [Google Scholar] [CrossRef]
- Mawane, J.; Naji, A.; Ramdani, M. A cluster validity for optimal configuration of Kohonen maps in e-learning recommendation. Indones. J. Electr. Eng. Comput. Sci. 2022, 26, 482–492. [Google Scholar] [CrossRef]
- Huang, X. Application of computer data mining technology based on AKN algorithm in denial of service attack defense detection. Wirel. Commun. Mob. Comput. 2022, 2022, 4729526. [Google Scholar] [CrossRef]
- Amiri, V.; Nakagawa, K. Using a linear discriminant analysis (LDA)-based nomenclature system and self-organizing maps (SOM) for spatiotemporal assessment of groundwater quality in a coastal aquifer. J. Hydrol. 2021, 603, 127082. [Google Scholar] [CrossRef]
- Kovács, T.; Ko, A.; Asemi, A. Exploration of the investment patterns of potential retail banking customers using two-stage cluster analysis. J. Big Data 2021, 8, 141. [Google Scholar] [CrossRef]
- Kuehn, A.A.; Hamburger, M.J. A heuristic program for locating warehouses. Manag. Sci. 1963, 9, 643–666. [Google Scholar] [CrossRef]
- Alp, O.; Erkut, E.; Drezner, Z. An efficient genetic algorithm for the p-median problem. Ann. Oper. Res. 2003, 122, 21–42. [Google Scholar] [CrossRef]
- Agarwal, C.C.; Orlin, J.B.; Tai, R.P. Optimized crossover for the independent set problem. Oper. Res. 1997, 45, 226–234. [Google Scholar] [CrossRef] [Green Version]
- Kazakovtsev, L.A.; Antamoshkin, A.N. Genetic algorithm wish fast greedy heuristic for clustering and location problems. Informatica 2014, 38, 229–240. [Google Scholar]
- Andras, P.; Idowu, O. Kohonen networks with graph-based augmented metrics. In Proceedings of the Workshop on Self-Organizing Maps (WSOM 2005), Paris, France, 5–8 September 2005; pp. 179–186. [Google Scholar]
- Horio, K.; Koga, T.; Yamakawa, T. Self-organizing map with distance measure defined by data distribution. In Proceedings of the 2008 World Automation Congress, Waikoloa, HI, USA, 28 September–2 October 2008; pp. 1–6. [Google Scholar]
- Kohonen, T.; Kaski, S.; Lappalainen, H. Self-organized formation of various invariant-feature filters in the adaptive-subspace SOM. Neural Comput. 1997, 9, 1321–1344. [Google Scholar] [CrossRef]
- Furukawa, T. SOM of SOMs. Neural Netw. 2009, 22, 463–478. [Google Scholar] [CrossRef] [Green Version]
- Arnonkijpanich, B.; Hasenfuss, A.; Hammer, B. Local matrix adaptation in topographic neural maps. Neurocomputing 2011, 74, 522–539. [Google Scholar] [CrossRef] [Green Version]
- Yoneda, K.; Furukawa, T. Distance metric learning for the self-organizing map using a co-training approach. Int. J. Innov. Comput. Inf. Control 2018, 14, 2343–2351. [Google Scholar] [CrossRef]
- Alfeilat, H.; Hassanat, A.; Lasassmeh, O.; Tarawneh, A.; Alhasanat, M.; Salman, H.; Prasath, V. Effects of distance measure choice on K-Nearest Neighbor classifier performance: A review. Big Data 2019, 7, 221–248. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Weller-Fahy, D.J.; Borghetti, B.J.; Sodemann, A.A. A Survey of Distance and similarity measures used within network intrusion anomaly detection. IEEE Commun. Surv. Tutor. 2015, 17, 70–91. [Google Scholar] [CrossRef]
- McLachlan, G. Mahalanobis distance. Resonance 1999, 4, 20–26. [Google Scholar] [CrossRef]
- De Bodt, E.; Cottrell, M.; Letremy, P.; Verleysen, M. On the use of self-organizing maps to accelerate vector quantization. Neurocomputing 2004, 56, 187–203. [Google Scholar] [CrossRef] [Green Version]
- Haykin, S. Neural Networks and Learning Machines; Pearson Education: New York, NY, USA, 2009. [Google Scholar]
- Fausett, L. Fundamental of Neural Networks: Architectures, Algorithms, and Applications; Prentice Hall International: Hoboken, NJ, USA, 1994; pp. 169–175. [Google Scholar]
- Shkaberina, G.S.; Orlov, V.I.; Tovbis, E.M.; Kazakovtsev, L.A. On the optimization models for automatic grouping of industrial products by homogeneous production batches. In Mathematical Optimization Theory and Operations Research 2020, Communications in Computer and Information Science; Kochetov, Y., Bykadorov, I., Gruzdeva, T., Eds.; Springer: Cham, Switzerland, 2020; Volume 1275, pp. 421–436. [Google Scholar]





| Parameter | SCL | SCL-GREEDY(2) | SCL-GREEDY(3) |
|---|---|---|---|
| Two-batch mixed lot (p < 0.00001) | |||
| K1 = 2 | K1 = 4 | K1 = 6 | |
| Min | 415.627 | 371.1297 | 301.2941 |
| Max | 415.627 | 371.1322 | 337.3007 |
| Mean | 415.627 | 371.1301 | 329.2811 1 |
| σ | 6.38E-12 | 0.000772 | 14.67288 |
| V | 1.53E-12 | 0.000208 | 4.456033 |
| R | 2.80E-11 | 0.002558 | 36.00667 |
| Three-batch mixed lot (p < 0.00001) | |||
| K1 = 3 | K1 = 6 | K1 = 9 | |
| Min | 406.912 | 397.815 | 397.787 |
| Max | 438.101 | 417.747 | 407.933 |
| Mean | 431.002 | 415.140 | 406.966 |
| σ | 8.395 | 4.783 | 2.167 |
| V | 1.948 | 1.152 | 0.533 |
| R | 31.189 | 19.933 | 10.146 |
| Four-batch mixed lot (p = 0.61708) | |||
| K1 = 4 | K1 = 8 | K1 = 12 | |
| Min | 606.056 | 596.008 | 594.863 |
| Max | 614.033 | 892.644 | 903.672 |
| Mean | 609.644 | 689.886 | 704.368 |
| σ | 2.167 | 125.611 | 136.492 |
| V | 0.355 | 18.208 | 19.378 |
| R | 7.977 | 296.636 | 308.810 |
| Parameter | SCL | SCL-GREEDY(2) | SCL-GREEDY(3) |
|---|---|---|---|
| Two-batch mixed lot (p < 0.00001) | |||
| K1 = 2 | K1 = 4 | K1 = 6 | |
| Min | 198.486 | 193.825 | 191.610 |
| Max | 441.215 | 395.174 | 393.348 |
| Mean | 296.329 | 251.285 | 206.390 1 |
| σ | 104.214 | 84.992 | 50.003 |
| V | 35.168 | 33.823 | 24.228 |
| R | 198.486 | 193.825 | 191.610 |
| Three-batch mixed lot (p = 0.00214) | |||
| K1 = 3 | K1 = 6 | K1 = 9 | |
| Min | 365.927 | 274.081 | 365.719 |
| Max | 372.730 | 370.565 | 369.705 |
| Mean | 371.892 | 366.467 | 367.961 |
| σ | 2.059 | 17.518 | 1.459 |
| V | 0.554 | 4.780 | 0.396 |
| R | 6.803 | 96.484 | 3.986 |
| Four-batch mixed lot (p = 0.0012) | |||
| K1 = 4 | K1 = 8 | K1 = 12 | |
| Min | 952.563 | 939.212 | 914.629 |
| Max | 1142.812 | 1133.992 | 1108.637 |
| Mean | 1113.352 | 1084.122 | 1071.603 |
| σ | 55.095 | 74.012 | 63.228 |
| V | 4.949 | 6.827 | 5.900 |
| R | 952.563 | 939.212 | 914.629 |
| Parameter | SCL | SCL-GREEDY(2) | SCL-GREEDY(3) |
|---|---|---|---|
| Two-batch mixed lot (p < 0.00001) | |||
| K1 = 2 | K1 = 4 | K1 = 6 | |
| Min | 198.486 | 193.825 | 191.611 |
| Max | 450.382 | 413.390 | 386.087 |
| Mean | 312.271 | 228.919 | 205.969 1 |
| σ | 100.749 | 74.987 | 47.677 |
| V | 32.263 | 32.757 | 23.148 |
| R | 251.896 | 219.564 | 194.475 |
| Three-batch mixed lot (p < 0.00001) | |||
| K1 = 3 | K1 = 6 | K1 = 9 | |
| Min | 367.557 | 366.012 | 366.085 |
| Max | 372.730 | 370.568 | 369.725 |
| Mean | 372.527 | 369.305 | 368.306 |
| σ | 0.942 | 1.715 | 1.324 |
| V | 0.253 | 0.464 | 0.360 |
| R | 5.173 | 4.556 | 3.640 |
| Four-batch mixed lot (p = 0.02088) | |||
| K1 = 4 | K1 = 8 | K1 = 12 | |
| Min | 952.513 | 939.456 | 914.668 |
| Max | 1142.098 | 1129.014 | 1112.335 |
| Mean | 1097.790 | 1099.933 | 1067.170 |
| σ | 73.902 | 54.806 | 69.570 |
| V | 6.732 | 4.983 | 6.519 |
| R | 189.584 | 189.558 | 197.668 |
| Parameter | SCL | SCL-GREEDY(2) | SCL-GREEDY(3) |
|---|---|---|---|
| Two-batch mixed lot (p = 0.06288) | |||
| K1 = 2 | K1 = 4 | K1 = 6 | |
| Min | 352.603 | 359.915 | 356.673 |
| Max | 458.955 | 439.944 | 421.191 |
| Mean | 399.825 | 396.924 | 388.449 |
| σ | 24.151 | 21.471 | 15.522 |
| V | 6.040 | 5.409 | 3.996 |
| R | 106.353 | 80.029 | 64.519 |
| Three-batch mixed lot (p = 0.00338) | |||
| K1 = 3 | K1 = 6 | K1 = 9 | |
| Min | 462.220 | 455.998 | 451.949 |
| Max | 493.155 | 493.356 | 490.924 |
| Mean | 484.589 | 480.276 | 476.854 1 |
| σ | 7.020 | 8.892 | 8.978 |
| V | 1.449 | 1.851 | 1.883 |
| R | 30.935 | 37.358 | 38.976 |
| Four-batch mixed lot (p = 0.00034) | |||
| K1 = 4 | K1 = 8 | K1 = 12 | |
| Min | 962.070 | 980.266 | 959.326 |
| Max | 1084.960 | 1129.044 | 1109.918 |
| Mean | 1050.083 | 1044.941 | 996.063 |
| σ | 34.760 | 63.595 | 51.328 |
| V | 3.310 | 6.086 | 5.153 |
| R | 122.890 | 148.778 | 150.592 |
| Parameter | SCL | SCL-GREEDY(2) | SCL-GREEDY(3) |
|---|---|---|---|
| Two-batch mixed lot (p < 0.00001) | |||
| K1 = 2 | K1 = 4 | K1 = 6 | |
| Min | 198.486 | 193.825 | 191.609 |
| Max | 437.413 | 403.538 | 396.210 |
| Mean | 360.874 | 248.205 | 224.361 1 |
| σ | 87.569 | 88.921 | 72.589 |
| V | 24.266 | 35.826 | 32.354 |
| R | 238.927 | 209.712 | 204.602 |
| Three-batch mixed lot (p < 0.00001) | |||
| K1 = 3 | K1 = 6 | K1 = 9 | |
| Min | 372.016 | 366.748 | 365.858 |
| Max | 372.730 | 370.567 | 369.709 |
| Mean | 372.636 | 369.982 | 368.337 |
| σ | 0.179 | 1.256 | 1.271 |
| V | 0.048 | 0.340 | 0.345 |
| R | 0.714 | 3.819 | 3.851 |
| Four-batch mixed lot (p = 0.00096) | |||
| K1 = 4 | K1 = 8 | K1 = 12 | |
| Min | 952.637 | 939.453 | 912.548 |
| Max | 1140.960 | 1131.118 | 1109.011 |
| Mean | 1114.074 | 1077.780 | 1062.806 |
| σ | 55.075 | 77.853 | 68.147 |
| V | 4.944 | 7.223 | 6.412 |
| R | 188.324 | 191.665 | 196.463 |
| Algorithm | Initialization Method | ChD | EuD | SEuD | MahD | ManD |
|---|---|---|---|---|---|---|
| BVQ | average | 0.98 | 1 | 1 | 1 | 1 |
| k-means | 0.98 | 1 | 1 | 1 | 1 | |
| random | 0.98 | 1 | 1 | 0.62 | 1 | |
| BVQ-GREEDY(2) | average | 0.99 | 1 | 1 | 1 | 1 |
| k-means | 1 | 1 | 1 | 1 | 1 | |
| random | 0.99 | 1 | 1 | 1 | 1 | |
| BVQ-GREEDY(3) | average | 1 | 1 | 1 | 1 | 1 |
| k-means | 1 | 1 | 1 | 1 | 1 | |
| random | 1 | 1 | 1 | 1 | 1 | |
| SOM | average | 1 | 1 | 1 | 1 | 1 |
| k-means | 1 | 1 | 1 | 1 | 1 | |
| random | 1 | 1 | 1 | 1 | 1 | |
| SOM-GREEDY(2) | average | 1 | 1 | 1 | 1 | 1 |
| k-means | 1 | 1 | 1 | 1 | 1 | |
| random | 1 | 1 | 1 | 0.63 | 1 | |
| SOM-GREEDY(3) | average | 1 | 1 | 1 | 1 | 1 |
| k-means | 1 | 1 | 1 | 1 | 1 | |
| random | 1 | 1 | 1 | 0.62 | 1 | |
| k-means | random | 0.99 | 0.98 | 0.98 | 0.67 | 0.99 |
| Algorithm | Initialization Method | ChD | EuD | SEuD | MahD | ManD |
|---|---|---|---|---|---|---|
| BVQ | average | 0.72 | 0.64 | 0.64 | 0.94 | 0.64 |
| k-means | 0.97 | 0.64 | 0.64 | 0.92 | 0.64 | |
| random | 0.60 | 0.64 | 0.64 | 0.62 | 0.64 | |
| BVQ-GREEDY(2) | average | 0.95 | 1 | 1 | 0.95 | 1 |
| k-means | 0.95 | 1 | 1 | 0.92 | 1 | |
| random | 0.95 | 0.64 | 0.64 | 0.51 | 0.64 | |
| BVQ-GREEDY(3) | average | 0.95 | 1 | 1 | 0.95 | 1 |
| k-means | 0.95 | 0.98 | 1 | 0.94 | 0.98 | |
| random | 0.96 | 0.64 | 0.64 | 0.39 | 0.64 | |
| SOM | average | 0.69 | 0.57 | 0.98 | 0.93 | 0.98 |
| k-means | 0.7 | 0.98 | 0.98 | 0.91 | 0.98 | |
| random | 0.7 | 0.98 | 0.56 | 0.88 | 0.98 | |
| SOM-GREEDY(2) | average | 0.96 | 0.64 | 0.64 | 0.94 | 0.64 |
| k-means | 0.96 | 0.64 | 0.64 | 0.94 | 0.64 | |
| random | 0.70 | 0.64 | 0.64 | 0.44 | 0.64 | |
| SOM-GREEDY(3) | average | 0.96 | 0.64 | 0.64 | 0.95 | 0.64 |
| k-means | 0.96 | 0.64 | 0.64 | 0.93 | 0.64 | |
| random | 0.96 | 0.64 | 0.64 | 0.40 | 0.64 | |
| k-means | random | 0.62 | 0.63 | 0.66 | 0.49 | 0.63 |
| Algorithm | Initialization Method | ChD | EuD | SEuD | MahD | ManD |
|---|---|---|---|---|---|---|
| BVQ | average | 0.39 | 0.60 | 0.60 | 0.65 | 0.63 |
| k-means | 0.76 | 0.60 | 0.60 | 0.49 | 0.48 | |
| random | 0.71 | 0.59 | 0.59 | 0.52 | 0.59 | |
| BVQ-GREEDY(2) | average | 0.99 | 0.99 | 0.64 | 0.50 | 0.64 |
| k-means | 0.92 | 0.92 | 0.92 | 0.50 | 0.99 | |
| random | 0.99 | 0.59 | 0.59 | 0.58 | 0.59 | |
| BVQ-GREEDY(3) | average | 0.99 | 0.99 | 0.99 | 0.50 | 0.99 |
| k-means | 0.74 | 0.74 | 0.74 | 0.57 | 0.99 | |
| random | 0.99 | 0.59 | 0.74 | 0.56 | 0.59 | |
| SOM | average | 0.99 | 0.99 | 0.99 | 0.97 | 0.98 |
| k-means | 0.38 | 0.98 | 0.65 | 0.98 | 0.98 | |
| random | 0.99 | 0.65 | 0.68 | 0.59 | 0.49 | |
| SOM-GREEDY(2) | average | 0.99 | 0.75 | 0.75 | 0.47 | 0.47 |
| k-means | 0.72 | 0.74 | 0.74 | 0.52 | 0.59 | |
| random | 0.64 | 0.58 | 0.58 | 0.56 | 0.59 | |
| SOM-GREEDY(3) | average | 0.64 | 0.62 | 0.74 | 0.47 | 0.48 |
| k-means | 0.58 | 0.74 | 0.74 | 0.57 | 0.59 | |
| random | 0.66 | 0.59 | 0.59 | 0.56 | 0.37 | |
| k-means | random | 0.39 | 0.65 | 0.65 | 0.65 | 0.66 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Shkaberina, G.; Verenev, L.; Tovbis, E.; Rezova, N.; Kazakovtsev, L. Clustering Algorithm with a Greedy Agglomerative Heuristic and Special Distance Measures. Algorithms 2022, 15, 191. https://doi.org/10.3390/a15060191
Shkaberina G, Verenev L, Tovbis E, Rezova N, Kazakovtsev L. Clustering Algorithm with a Greedy Agglomerative Heuristic and Special Distance Measures. Algorithms. 2022; 15(6):191. https://doi.org/10.3390/a15060191
Chicago/Turabian StyleShkaberina, Guzel, Leonid Verenev, Elena Tovbis, Natalia Rezova, and Lev Kazakovtsev. 2022. "Clustering Algorithm with a Greedy Agglomerative Heuristic and Special Distance Measures" Algorithms 15, no. 6: 191. https://doi.org/10.3390/a15060191