
Experimental and Numerical Investigation of the Mechanical Properties of a CFRP Tendon–Wedge Assembly Loaded under Transverse Compressive Loading
Abstract
:1. Introduction
2. Materials and Methods
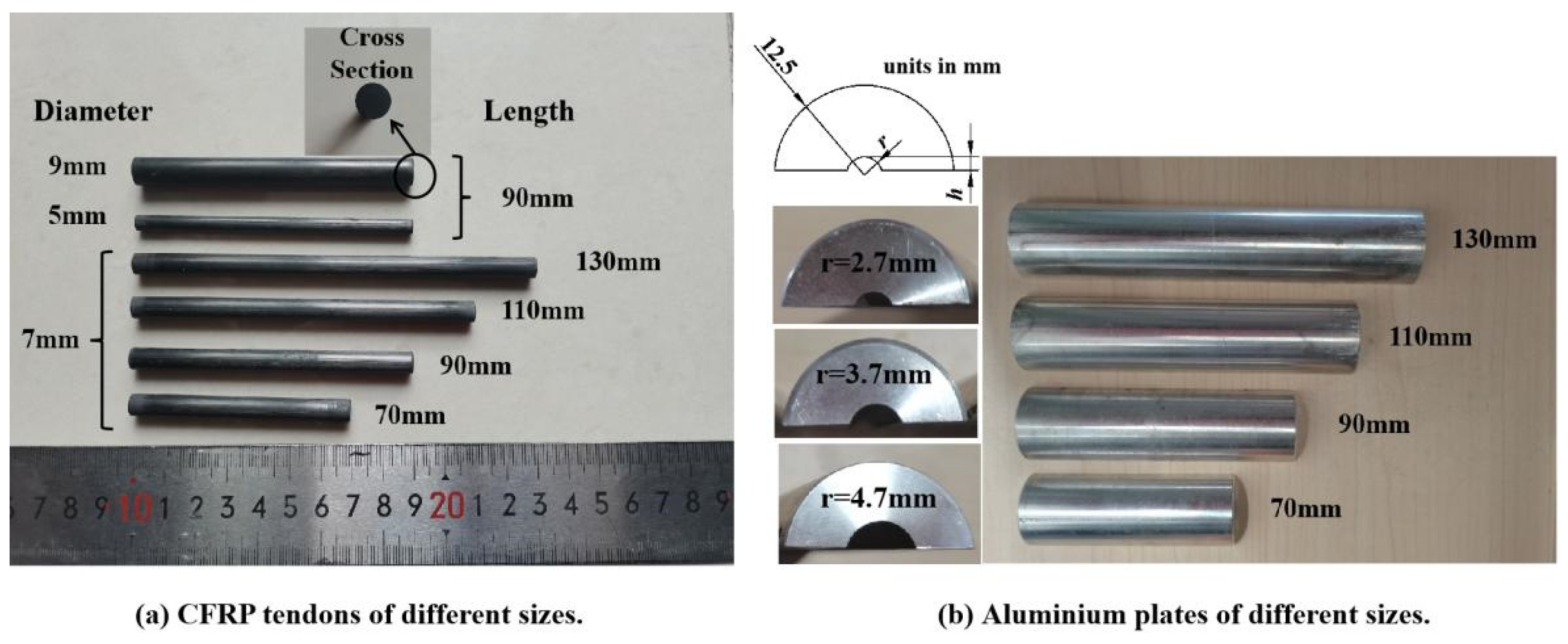
2.1. Materials and Test Specimens
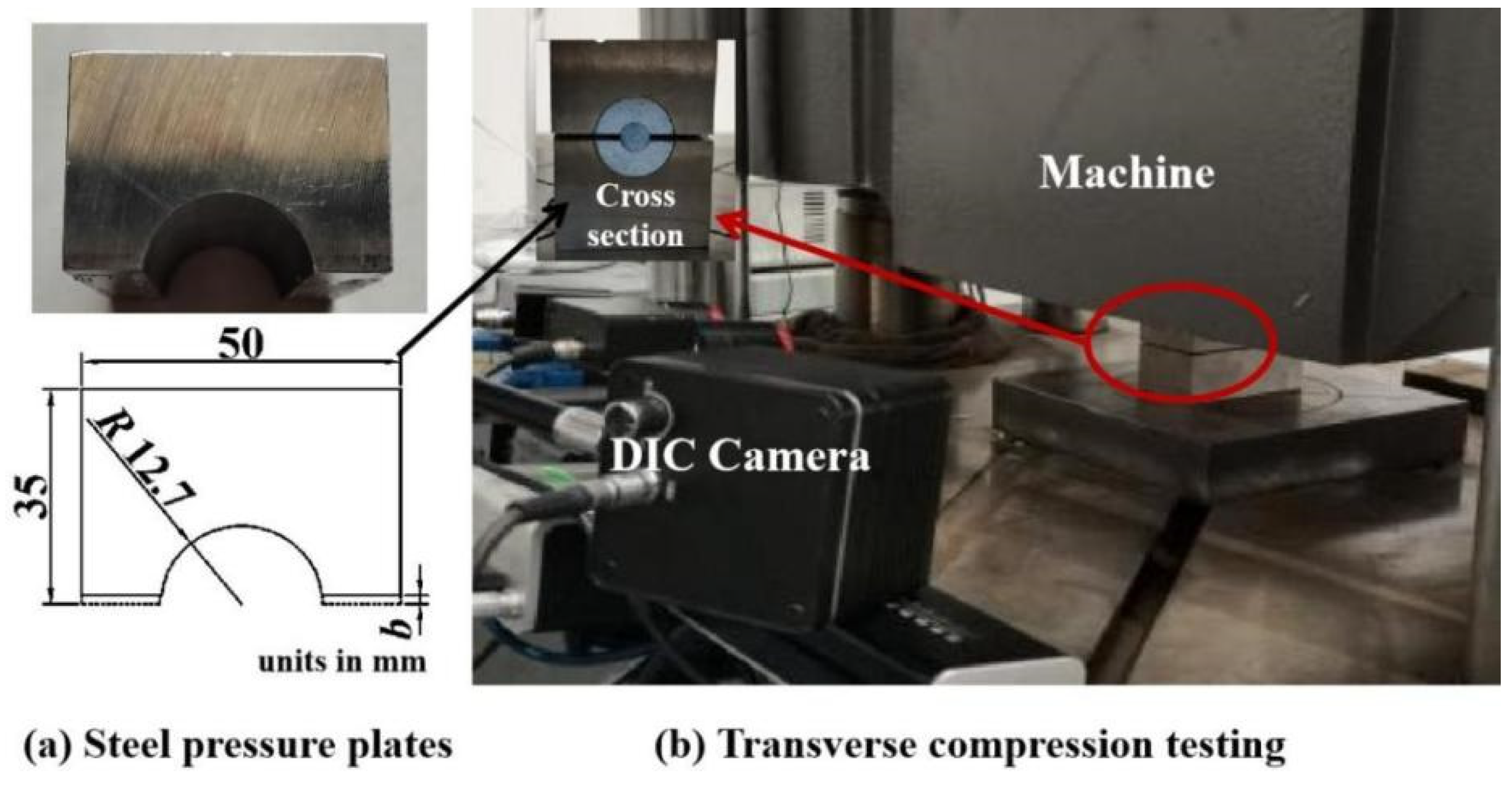
2.2. Test Method
3. Experimental Results and Discussion
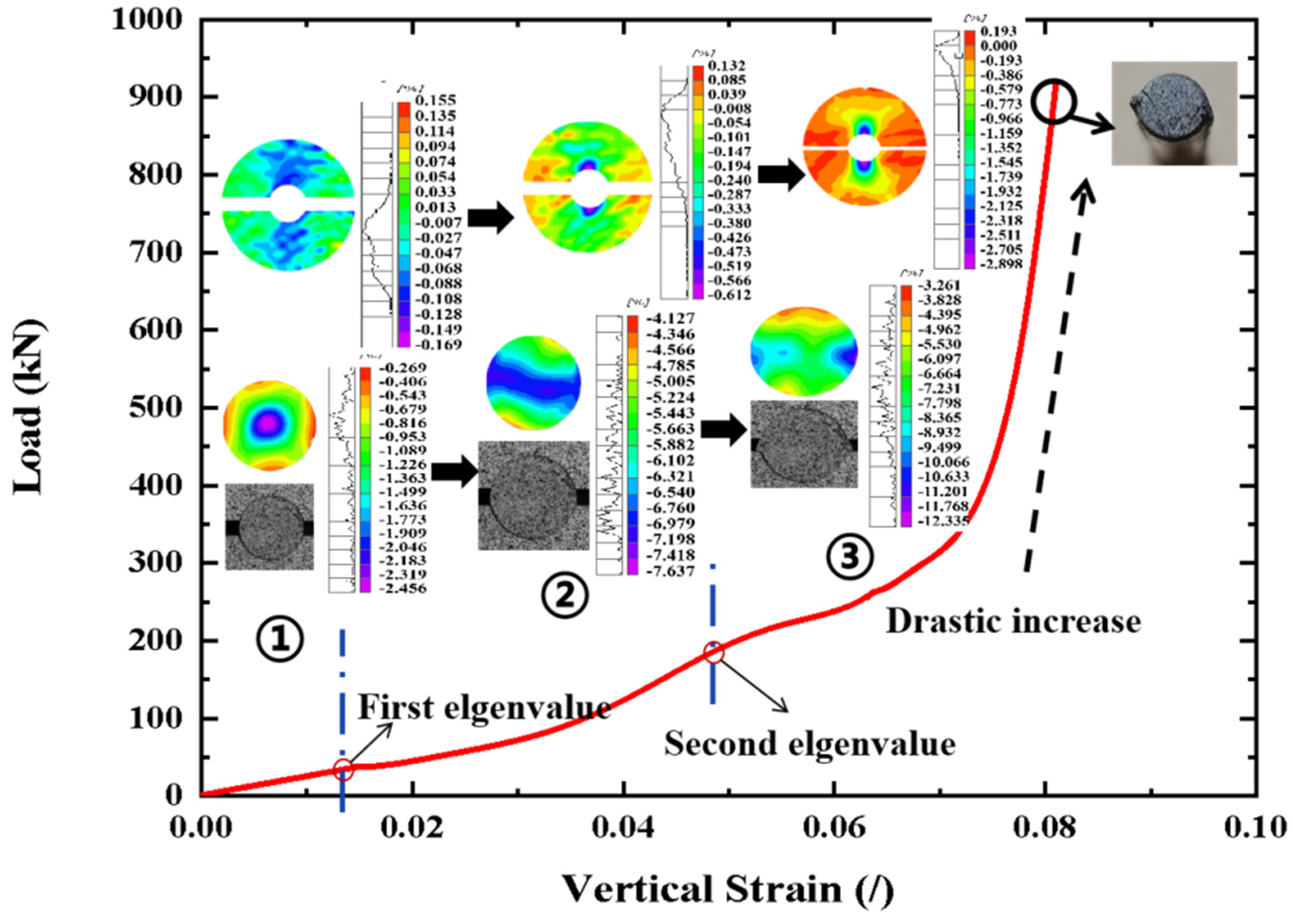
3.1. Deformation and Damage Mode of CFRP Tendons
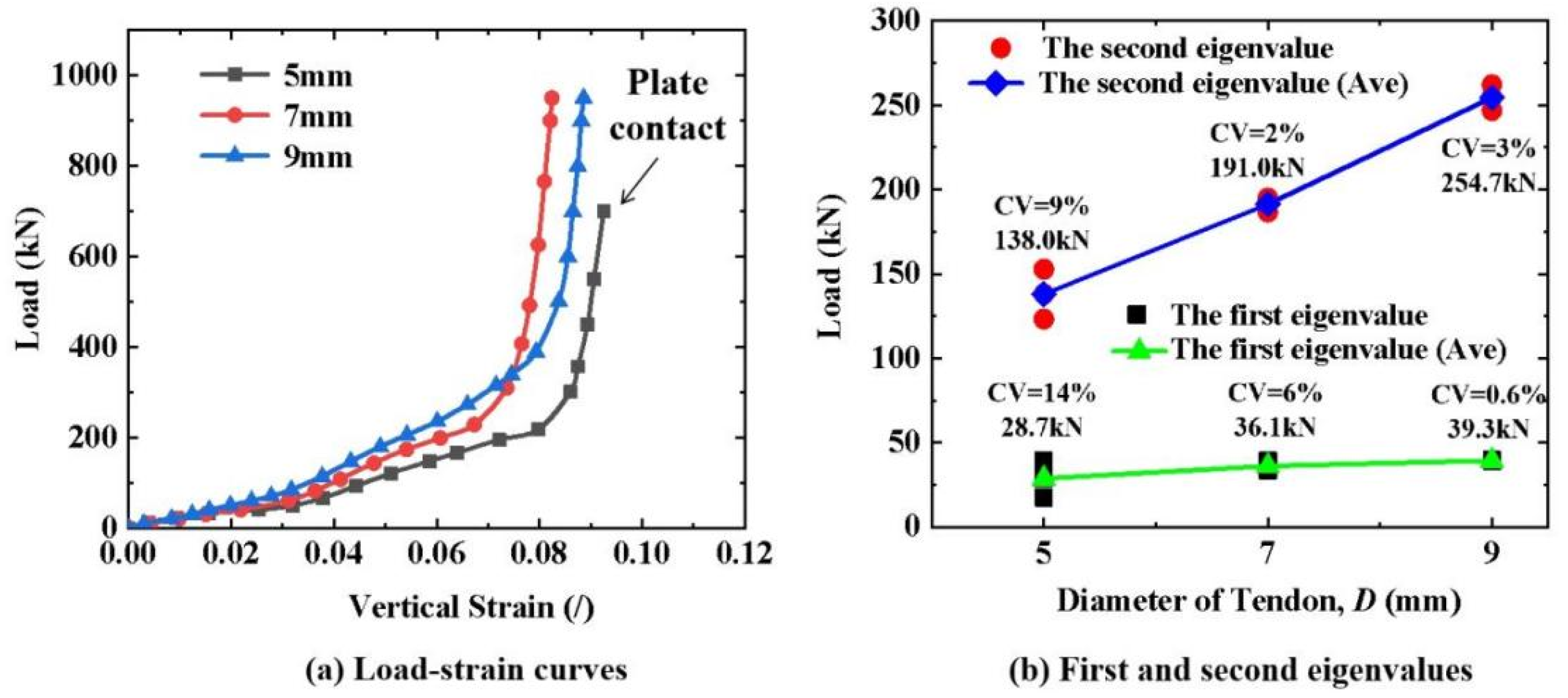
3.2. Effect of Diameter on the Compressive Properties of CFRP Tendons
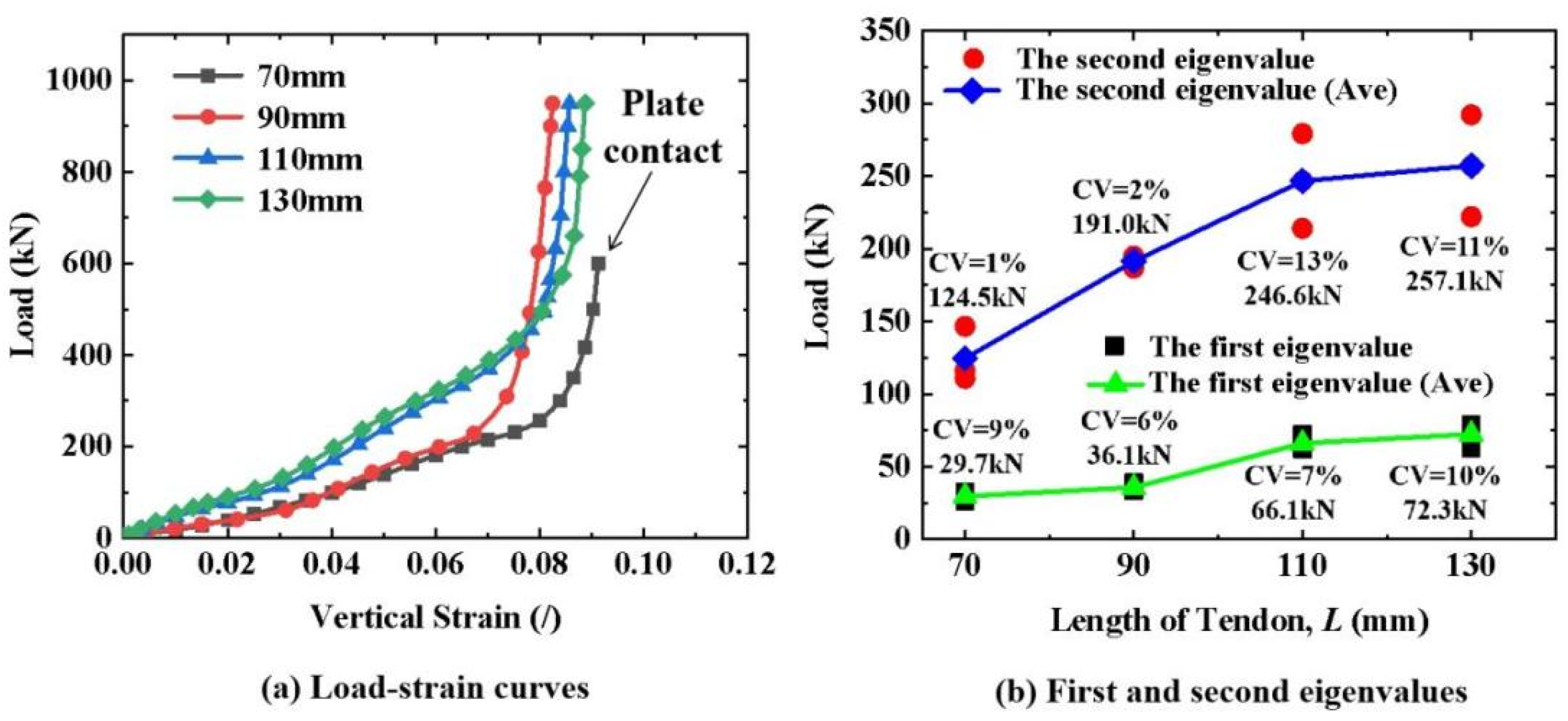
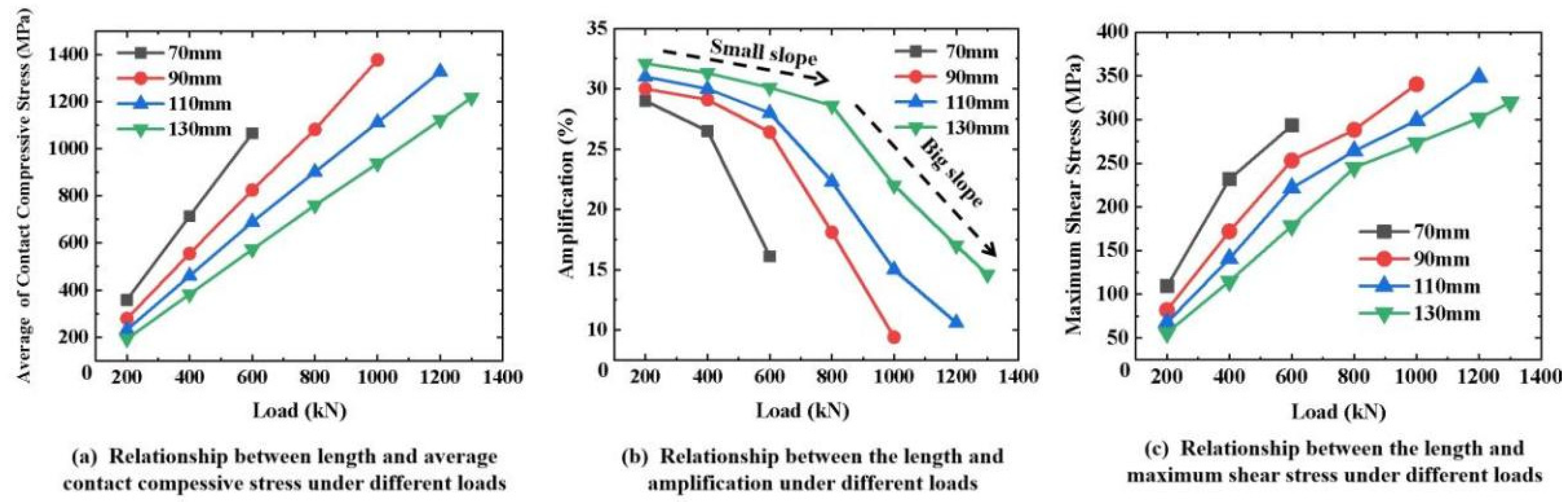
3.3. Effect of Length on the Compressive Properties of CFRP Tendons
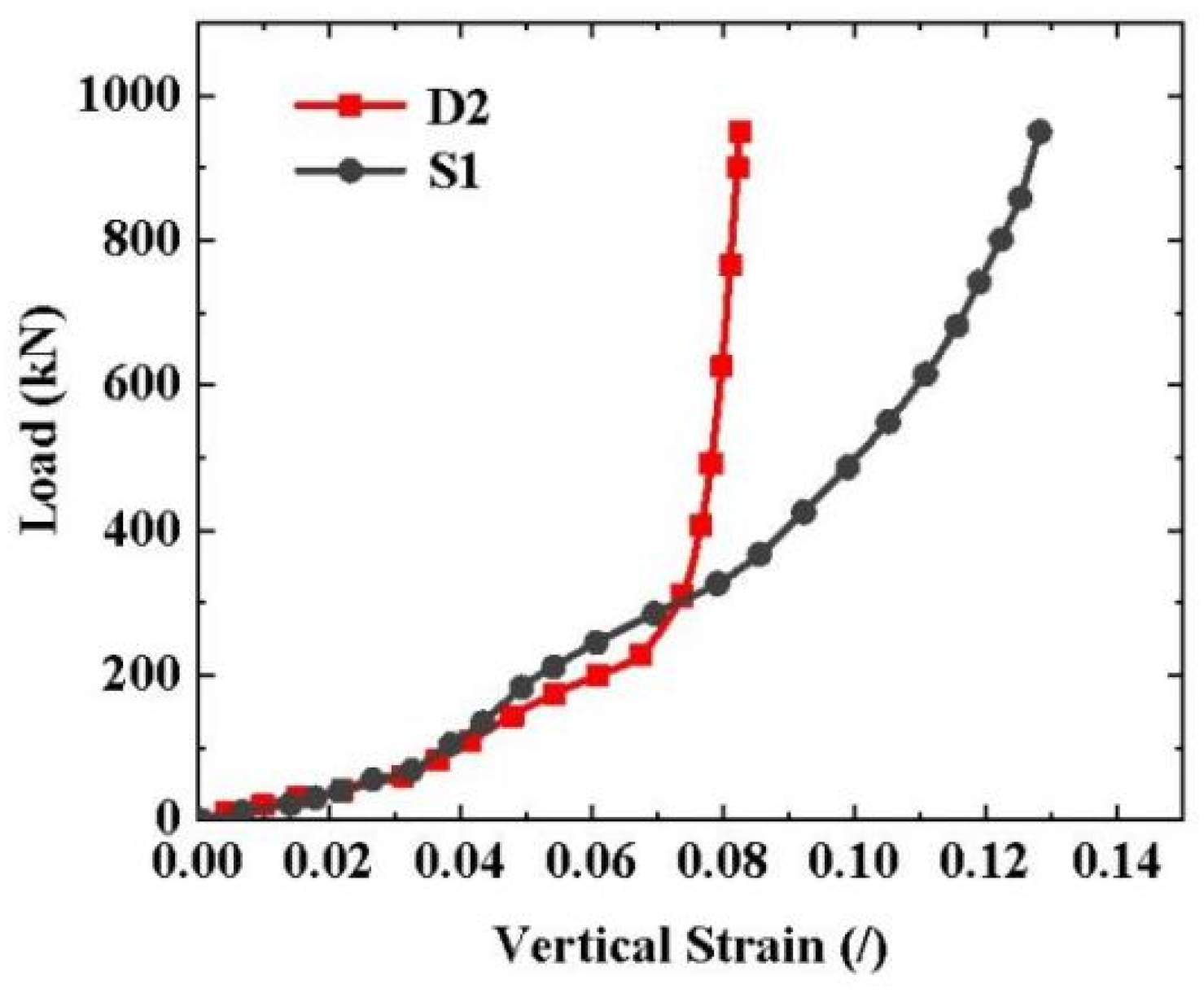
3.4. Effect of Aluminum Plates on the Compressive Properties of CFRP Tendons
4. Simulation Analysis Results and Discussion
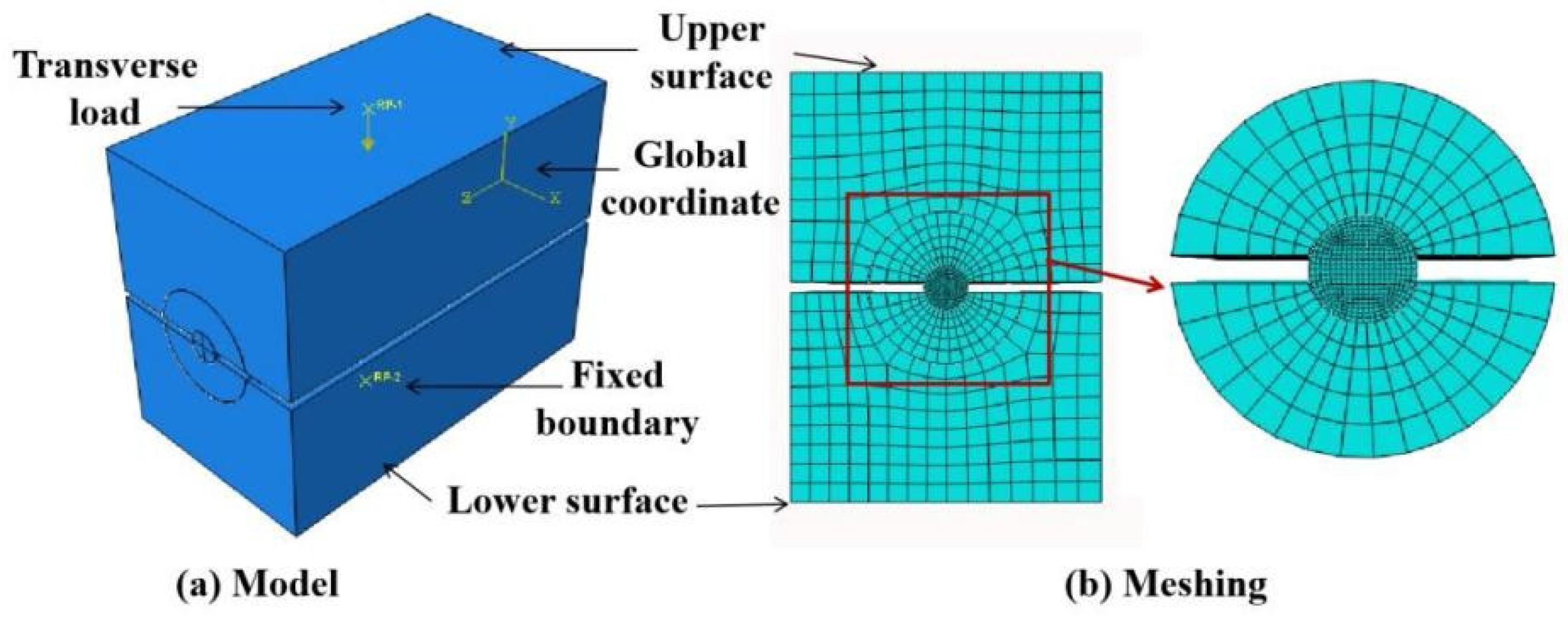
4.1. Finite Element Model (FEM)
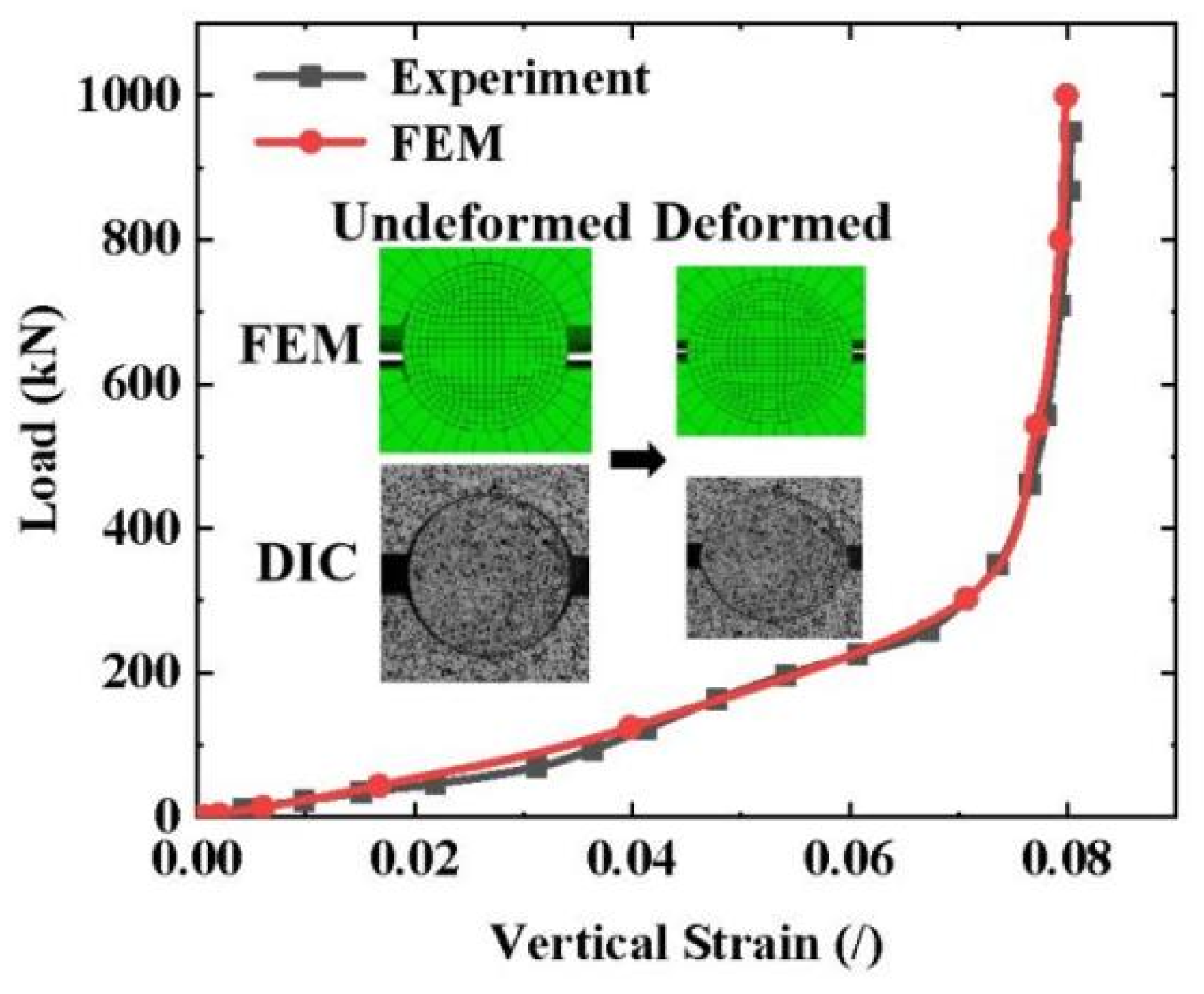
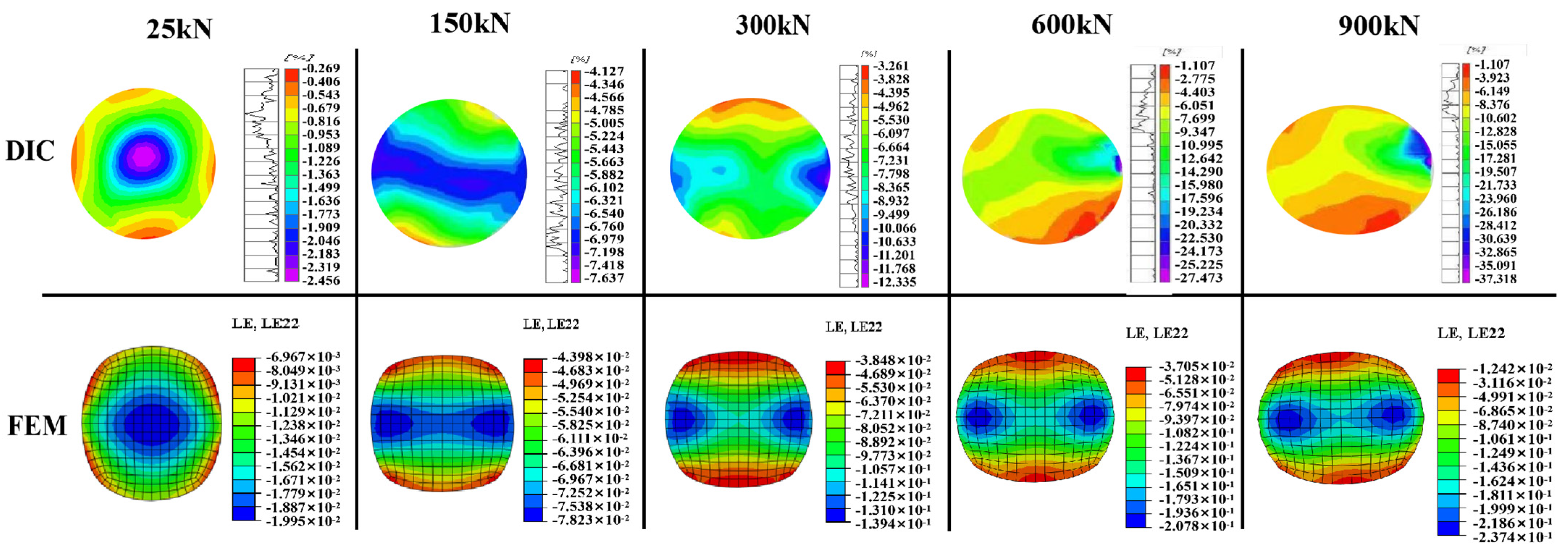
4.2. Comparison between FEM and Experimental Results
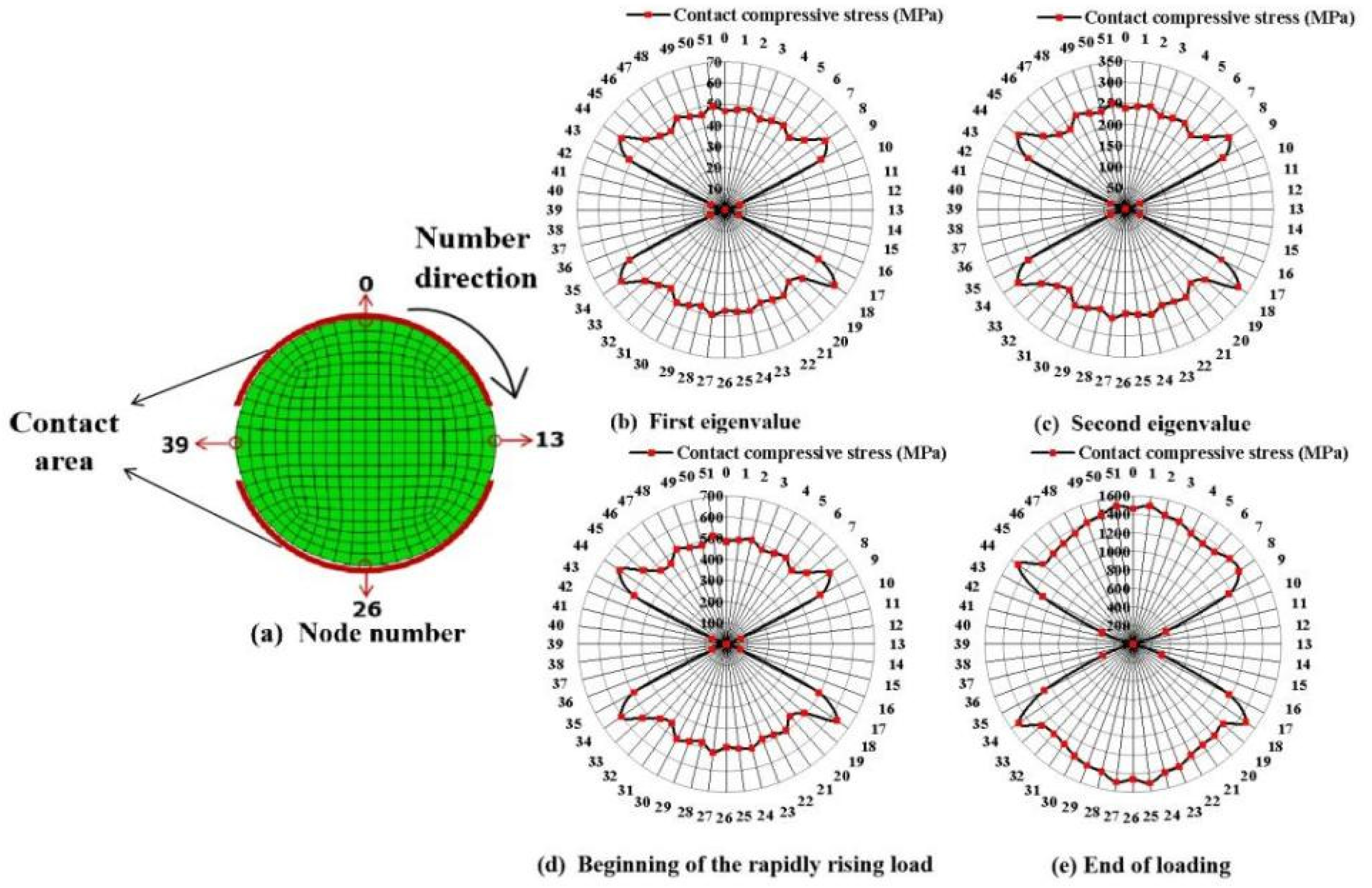
4.3. Contact Compressive Stress between CFRP Tendon and Aluminum Plate
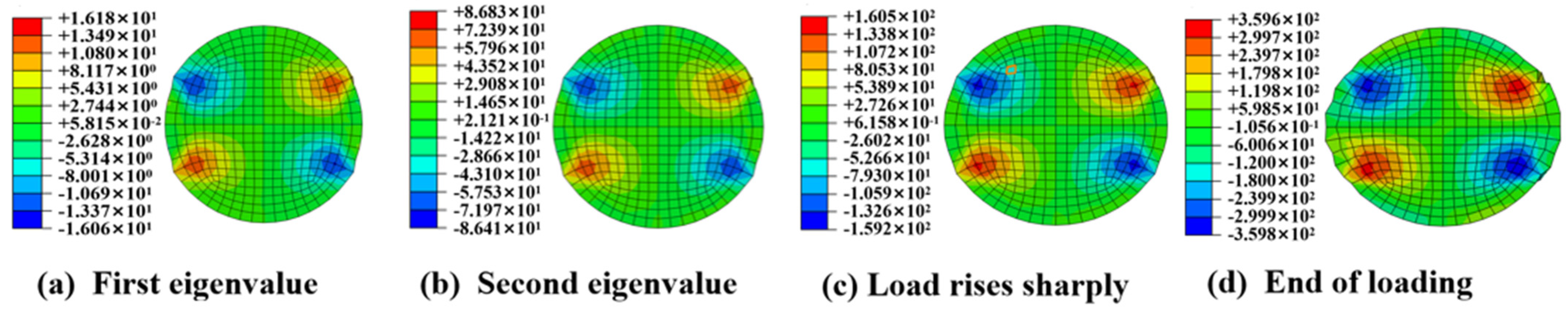
4.4. Shear Stress of CFRP Tendon
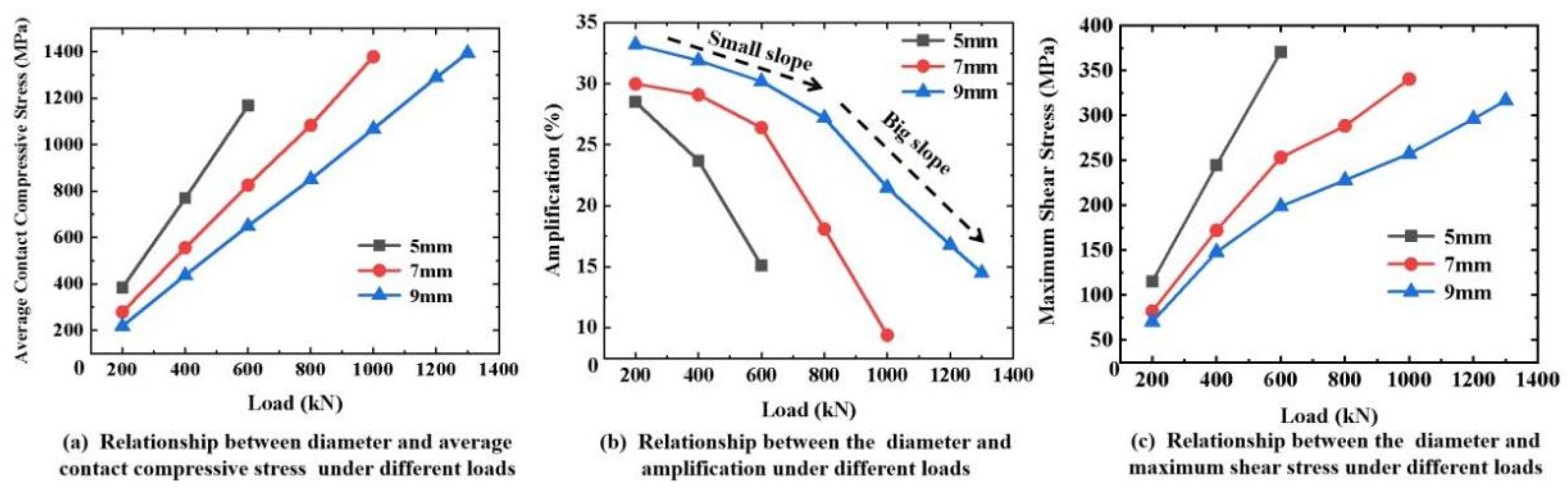
4.5. Effect of Size on Stress State of CFRP Tendon
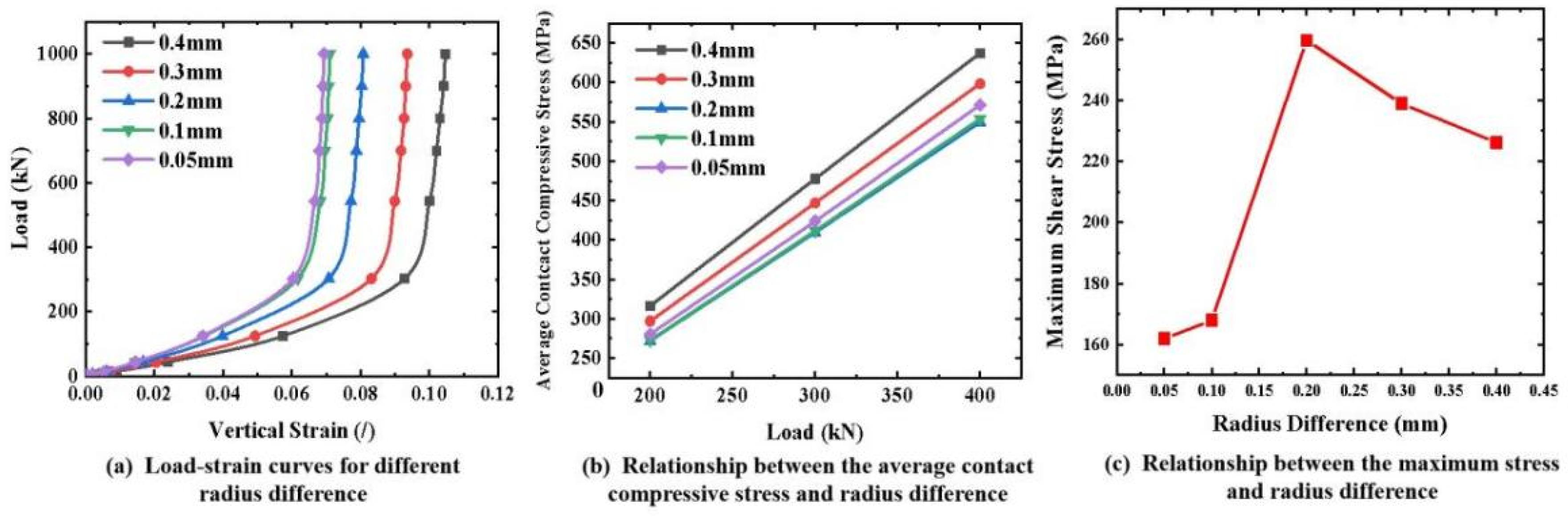
4.6. Effect of Radius Difference on the Stress State of CFRP Tendons
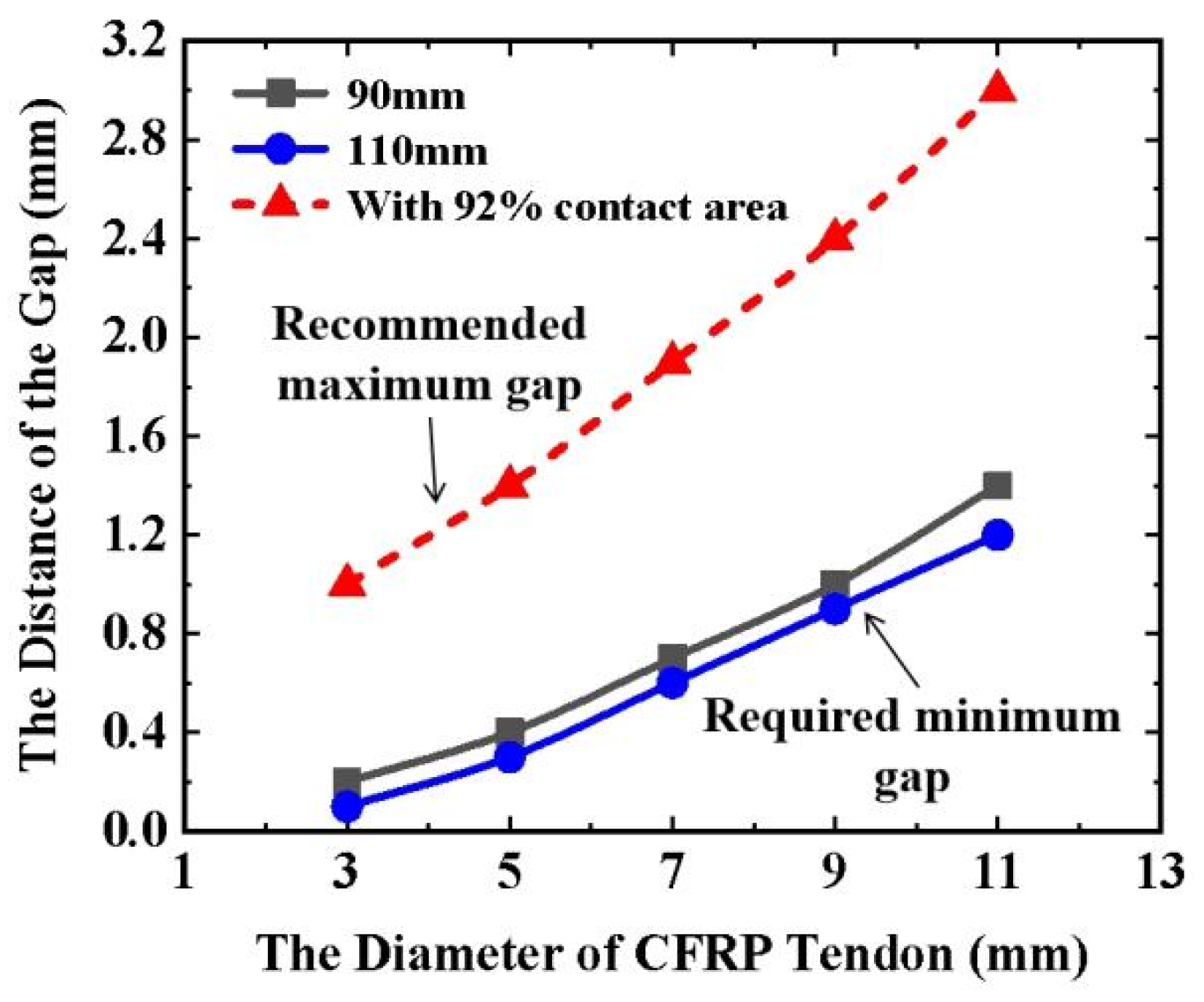
4.7. Required Minimum Wedge Gap
4.8. Tendon Size Selection and Integrated-Wedge Design Suggestion
5. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
Nomenclature
| A | Cross-sectional area of specimens |
| CFRP | Carbon-fiber-reinforced polymer |
| DIC | Digital image correlation |
| D | Diameter of specimens |
| FEM | Finite element model |
| gmin | Required minimum gap |
| gmax | Recommended maximum gap |
| h | Actual depth of groove in aluminum plate |
| L | Length of specimens |
| P | Contact force |
| R | Outer radius of aluminum plate |
| r | Inner radius of aluminum plate |
| σ | Longitudinal tensile stress |
| μ | Friction coefficient |
References
- Colford, B. Applying advanced bridge management plans to achieve best value and minimum disruption. In Proceedings of the 1st Asia Bridge Summit 2008; Merisis Consulting Company Ltd.: Shanghai, China, 2008. [Google Scholar]
- Meier, U.; Müller, R.; Puck, A. GFK-Biegeträger unter quasistatischer und schwingender Beanspruchung. In Proceedings of Internationale Tagung über verstärkte Kunststoffe; AVK Frankfurt: Frankfurt, Germany, 1982; pp. 35.1–35.7. [Google Scholar]
- Saadatmansh, H.; Tannous, F.E. Relaxation, creep, and fatigue behavior of carbon fiber reinforced plastic tendons. ACI Mater. J. 1999, 96, 143–153. [Google Scholar]
- Meier, U. The life times of polymer composites in construction. Am. Inst. Phys. Conf. Ser. 2016, 1736, 020040. [Google Scholar]
- Liu, T.Q.; Liu, X.; Feng, P. A comprehensive review on mechanical properties of pultruded FRP composites subjected to long-term environmental effects. Compos. Part B-Eng. 2020, 191, 107985. [Google Scholar] [CrossRef]
- Yang, Y.Q.; Fahmy, M.F.M.; Guan, S.J.; Pan, A.H.; Zhan, Y.; Zhao, T.D. Properties and applications of FRP cable on long-span cable-supported bridges: A review. Compos. Part B-Eng. 2020, 190, 107934. [Google Scholar] [CrossRef]
- Meier, U. Carbon fiber reinforced polymer cables: Why? Why not? What if? Arab. J. Sci. Eng. 2012, 37, 399–411. [Google Scholar] [CrossRef]
- Liu, Y.; Zwingmann, B.; Schlaich, M. Carbon fiber reinforced polymer for cable structures-A review. Polymers 2015, 7, 2078–2099. [Google Scholar] [CrossRef]
- Schlaich, M.; Liu, Y.; Zwingmann, B. Carbon fibre reinforced polymer for orthogonally loaded cable net structures. Struct. Eng. Int. 2015, 25, 34–42. [Google Scholar] [CrossRef]
- Wang, L.C.; Zhang, J.Y.; Xu, J.; Han, Q.H. Anchorage systems of CFRP cables in cable structures-A review. Constr. Build. Mater. 2018, 160, 82–99. [Google Scholar] [CrossRef]
- Han, Q.H.; Wang, L.C.; Xu, J. Test and numerical simulation of large angle wedge type of anchorage using transverse enhanced CFRP tendons for beam string structure. Constr. Build. Mater. 2017, 144, 225–237. [Google Scholar] [CrossRef]
- Sayed-Ahmed, E.Y.; Shrive, N.G. A new steel anchorage system for posttensioning application using carbon fiber reinforced plastic tendons. Can. J. Civil Eng. 1998, 25, 113–127. [Google Scholar] [CrossRef]
- AAl-Mayah, K. Soudki, A. Plumtree, Development and assessment of a new CFRP rod-anchor system for prestressed concrete. Appl. Compos. Mater. 2006, 13, 321–334. [Google Scholar] [CrossRef]
- Heydarinouri, H.; Motavalli, M.; Nussbaumer. Development of a mechanical wedge–barrel anchor for CFRP rods: Static and fatigue behaviors. J. Compos. Constr. 2021, 25, 04021015. [Google Scholar] [CrossRef]
- Schmidt, J.W.; Bennitz, A.; Taljsten, B. Development of mechanical anchor for CFRP tendons using integrated sleeve. J. Compos. Constr. 2010, 14, 397–405. [Google Scholar] [CrossRef]
- Schmidt, J.W.; Smith, S.T.; Taljsten, B.; Benntiz, A.; Goltermann, P.; Pedersen, H. Numerical Simulation and Experimental Validation of an Integrated Sleeve-Wedge Anchorage for CFRP Rods. J. Compos. Constr. 2011, 15, 284–292. [Google Scholar] [CrossRef]
- Schmidt, J.W.; Christensen, C.O.; Goltermann, P. Ductile response controlled EW CFRP anchor system. Compos. Part B-Eng. 2020, 201, 108371. [Google Scholar] [CrossRef]
- Talreja, R.; Waas, A.M. Concepts and definitions related to mechanical behavior of fiber reinforced composite materials. Compos. Sci. Technol. 2022, 217, 109081. [Google Scholar] [CrossRef]
- Schmidt, J.W.; Bennitz, A.; Taljsten, B.; Goltermann, P.; Pedersen, H. Mechanical anchorage of FRP tendons–A literature review. Constr. Build. Mater. 2012, 32, 110–121. [Google Scholar] [CrossRef]
- Terrasi, G.P.; Affolter, C.; Barbezat, M. Numerical optimization of a compact and reusable pretensioning anchorage system for CFRP tendons. J. Compos. Constr. 2011, 15, 126–135. [Google Scholar] [CrossRef]
- Han, Q.H.; Wang, L.C.; Xu, J. Experimental research on mechanical properties of transverse enhanced and high-temperature-resistant CFRP tendons for prestressed structure. Constr. Build. Mater. 2015, 98, 864–874. [Google Scholar] [CrossRef]
- Tanks, J.D.; Harris, D.K.; Sharp, S.R. Mechanical response of unidirectional composite bars loaded in transverse compression. Compos. Part B-Eng. 2016, 97, 18–25. [Google Scholar] [CrossRef]
- Fang, Y.W.; Jiang, R.N.; Huang, D.B. Transverse static and low-velocity impact behavior of CFRP wires under pretension. J. Compos. Constr. 2019, 23, 04019041. [Google Scholar] [CrossRef]
- Zhuge, P.; Tao, G.; Jie, Z. Optimal design method and experiment for improved wedge-type anchors of large-diameter smooth CFRP tendons. Appl. Compos. Mater. 2021, 28, 1997–2019. [Google Scholar] [CrossRef]
- ASTM Standard Test Method for Compressive Properties of Polymer Matrix Composite Materials with Unsupported Gage Section by Shear Loading; ASTM International: West Conshohocken, PA, USA, 2016.
- Al-Mayah, A.; Soudki, K.; Plumtree, A. Mechanical behavior of CFRP rod anchors under tensile Loading. J. Compos. Constr. 2001, 5, 128–135. [Google Scholar] [CrossRef]
- Al-Mayah, A.; Soudki, K.; Plumtree, A. FEM and mathematical models of the interfacial contact behaviour of CFRP-metal vouples. Compos. Struct. 2006, 73, 33–40. [Google Scholar] [CrossRef]
- Han, Q.H.; Wang, L.C.; Xu, J. Experimental research on fracture behaviors of damaged CFRP tendons: Fracture mode and failure analysis. Constr. Build. Mater. 2016, 112, 1013–1024. [Google Scholar] [CrossRef]
- Wang, L.C.; Kawaguchi, K.; Xu, J.; Han, Q.H. Effects of transverse constraints on the longitudinal compressive strength of unidirectional CFRP pultruded plates and rods. Compos. Struct. 2018, 207, 740–751. [Google Scholar] [CrossRef]
- Han, Q.H.; Wang, L.C.; Xu, J. Effect of chamfering of cable clamp plate on shear behaviour of CFRP tendons. Constr. Build. Mater. 2016, 113, 324–333. [Google Scholar] [CrossRef]


















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| No. | Number | CFRP Tendon | Aluminum Plate | |||
|---|---|---|---|---|---|---|
| D (mm) | L (mm) | R (mm) | r (mm) | h (mm) | ||
| D1 | 3 | 5 | 90 | 12.5 | 2.7 | 1.8 |
| D2 | 3 | 7 | 90 | 12.5 | 3.7 | 2.6 |
| D3 | 3 | 9 | 90 | 12.5 | 4.7 | 3.4 |
| L1 | 3 | 7 | 70 | 12.5 | 3.7 | 2.6 |
| L2 | 3 | 7 | 110 | 12.5 | 3.7 | 2.6 |
| L3 | 3 | 7 | 130 | 12.5 | 3.7 | 2.6 |
| S1 | 3 | 7 | 90 | - | - | - |
| Specimen Type | D1 | D2 | D3 | L1 | L2 | L3 |
|---|---|---|---|---|---|---|
| Average percentage of contact area (%) | 92.6 | 91.2 | 91.3 | 92.6 | 91.4 | 91.8 |
| Property | Unit | CFRP | Aluminum (6061-T6) | Steel (42CrMo) |
|---|---|---|---|---|
| Elastic modulus, E11 | MPa | 161000 [26] | 69,000 | 210,000 |
| Elastic modulus, E22 | MPa | 8700 [27] | - | - |
| Elastic modulus, E33 | MPa | 8700 [27] | - | - |
| Poisson’s ratio, ν12 | - | 0.32 [27] | 0.33 | 0.3 |
| Poisson’s ratio, ν13 | - | 0.32 [27] | - | - |
| Poisson’s ratio, ν23 | - | 0.38 [27] | - | - |
| Shear modulus, G12 | MPa | 7800 [27] | - | - |
| Shear modulus, G23 | MPa | 3094 [27] | - | - |
| Shear modulus, G13 | MPa | 7800 [27] | - | - |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Han, Q.; Zheng, X.; Wang, L. Experimental and Numerical Investigation of the Mechanical Properties of a CFRP Tendon–Wedge Assembly Loaded under Transverse Compressive Loading. Materials 2023, 16, 3305. https://doi.org/10.3390/ma16093305
Han Q, Zheng X, Wang L. Experimental and Numerical Investigation of the Mechanical Properties of a CFRP Tendon–Wedge Assembly Loaded under Transverse Compressive Loading. Materials. 2023; 16(9):3305. https://doi.org/10.3390/ma16093305
Chicago/Turabian StyleHan, Qinghua, Xiwen Zheng, and Lichen Wang. 2023. "Experimental and Numerical Investigation of the Mechanical Properties of a CFRP Tendon–Wedge Assembly Loaded under Transverse Compressive Loading" Materials 16, no. 9: 3305. https://doi.org/10.3390/ma16093305